Изобретение относится к медицинским инструментам.
В качестве ближайшего аналога этого изобретения и примера таких инструментов может рассматриваться устройство по авт.св. СССР N 1082417, кл. A 61 B 17/24, 1984, содержащее исполнительный орган в виде корпуса с неподвижной рабочей губкой и установленной внутри корпуса соосной тяги, соединяющей подвижную рабочую губку с приводным механизмом, имеющим соединенный с корпусом поворотный направляющий ниппель, закрепленный во втулочном фиксирующем приспособлении, жестко связанным с рукояткой, соединенной с подпружиненным рычагом, размещенным с возможностью взаимодействия с тягой посредством подвижного наконечника.
Недостатки известного устройства:
1. Ограничены функциональные возможности, так как его исполнительный орган жестко соединен с рукояткой и нет возможности замены одних рабочих губок другими.
2. Возможен самопроизвольный проворот ниппеля в кольцевом пазу втулки, что вызовет проворот исполнительного органа во время операции, так как в конструкции нет элементов, с помощью которых можно было бы отрегулировать вращение ниппеля.
3. Возможен выход инструментов из строя во время операции, так как возможен проворот ниппеля с трубкой относительно наконечника и скручивание тяги.
4. Затруднена стерилизация инструмента из-за неразборности всех частей инструментов.
Данное изобретение направлено на решение задачи по созданию такого гибкого управляемого хирургического инструмента, который полностью устраняет указанные недостатки путем выполнения быстроразъемного безрезьбового соединения рабочего органа с рукояткой, а также выполнения проточек на полдиаметра неподвижной трубки и подвижного наконечника в месте их соединения.
Следовательно, технический результат изобретения выражается в совершенствовании конструкции инструмента и повышении ее эксплуатационных свойств.
Сущность этого изобретения заключается в достижении упомянутого технического результата в гибком хирургическом инструменте, содержащем исполнительный орган в виде корпуса с неподвижной рабочей губкой и установленной внутри корпуса соосной тяги, соединяющей подвижную рабочую губку с приводным механизмом, имеющим соединенный с корпусом поворотный направляющий ниппель, закрепленный во втулочном фиксирующем приспособлении, жестко связанным с рукояткой, соединенной с подпружиненным рычагом, размещенным с возможностью взаимодействия с тягой посредством подвижного наконечника, причем в отличие от ближайшего аналога его втулочное фиксирующее приспособление выполнено в виде цанги с направителями, расположенными с возможностью взаимодействия с размещенной на ниппеле кольцевой канавкой, при этом корпус выполнен в виде гибкой трубки с направляющей концевой проточкой под ответную направляющую проточку, выполненную на наконечнике, имеющим также шейку под прорезь в рычаге, установленным с возможностью продольного перемещения в первом пазу, выполненном в рукоятке и подпружиненным плоской пружиной, размещенной с возможностью взаимодействия вторым продольным пазом с закрепленным на рукоятке упором, подвижная рабочая губка установлена на гибкой трубке, а глубина каждой проточки гибкой трубки и наконечника составляет половину диаметра.
Причинно-следственная связь вышеперечисленных признаков с достигаемым техническим результатом демонстрируется тем, что их совокупность и связи позволяют получить более совершенную конструкцию с повышенными эксплуатационными свойствами.
Например, расположение подвижной рабочей губки на гибкой трубке и выполнение втулочного фиксирующего приспособления в виде цанги с направителями, расположенными с возможностью взаимодействия с размещенной на ниппеле кольцевой канавкой, позволяет осуществить быстросъемную установку исполнительного органа на рукоятке и, следовательно, быструю замену рабочих губок во время операции.
Это же выполнение исключает самопроизвольный проворот ниппеля во втулочном фиксирующем приспособлении вместе с исполнительным органом за счет рассчитанного момента упругости направителей цанги при сохранении возможности поворота исполнительного органа на все время эксплуатации.
Выполнение корпуса в виде гибкой трубки с направляющей концевой проточкой под ответную направляющую проточку на наконечнике, на половину диаметра трубки и наконечника, а также выполнение наконечника с шейкой под прорезь в рычаге, установленным с возможностью продольного перемещения в первом пазу, расположенным в рукоятке и подпружиненным плоской пружиной, размещенной с возможностью взаимодействия вторым продольным пазом с закрепленным на рукоятке упором, исключают скручивание тяги, которое может привести к поломке инструмента во время операции.
Что же касается улучшения условий стерилизации, то их обеспечивает полная разборка инструмента, а также возможное выполнение наконечника со сквозным отверстием.
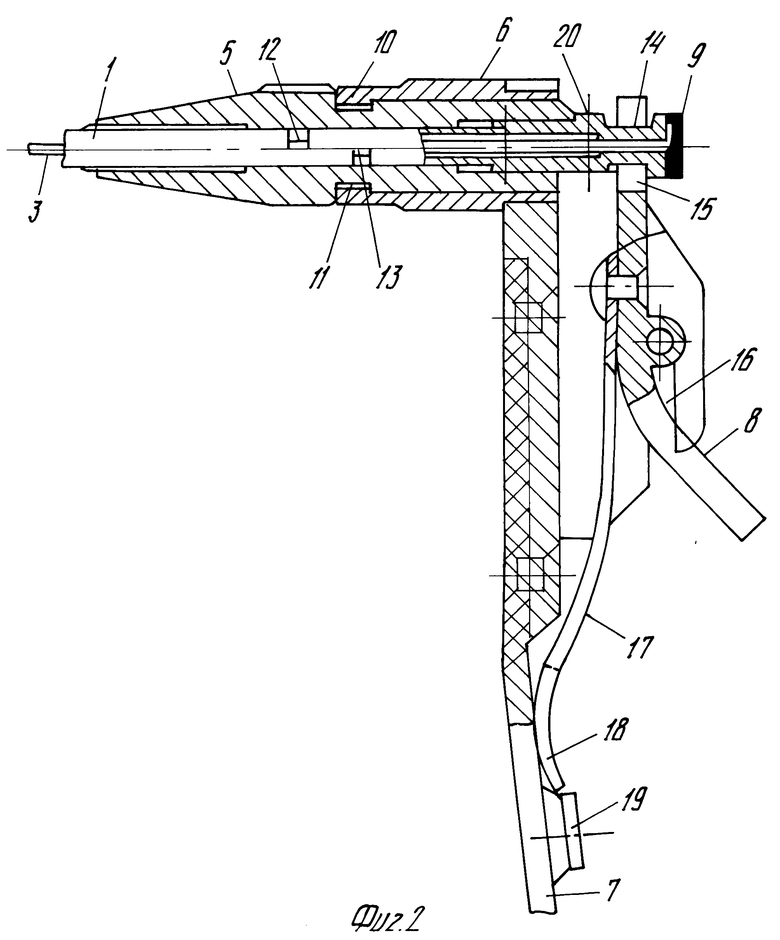
На фиг.1 изображен общий вид гибкого хирургического инструмента; на фиг. 2 - то же, разрез.
Гибкий хирургический инструмент содержит исполнительный орган в виде корпуса 1 с неподвижной рабочей губкой 2 и установленной внутри корпуса 1 соосной тяги 3, соединяющей подвижную рабочую губку 4 с приводным механизмом, имеющим соединенный с корпусом 1 поворотный направляющий ниппель 5, закрепленный во втулочном фиксирующем приспособлении 6, жестко связанным с рукояткой 7, соединенной с подпружиненным рычагом 8, размещенным с возможностью взаимодействия с тягой 3 посредством подвижного наконечника 9.
При этом втулочное фиксирующее приспособление 6 выполнено в виде цанги с направителями 10, расположенными с возможностью взаимодействия с размещенной на ниппеле 5 кольцевой канавкой 11, корпус 1 выполнен в виде гибкой трубки с направляющей концевой проточкой 12 под ответную направляющую проточку 13, выполненную на наконечнике 9, имеющем также шейку 14 под прорезь 15 в рычаге 8, установленном с возможностью продольного перемещения в первом пазу 16, выполненным в рукоятке и подпружиненным плоской пружиной 17, размещенной с возможностью взаимодействия вторым продольным пазом 18 с закрепленным на рукоятке 7 упором 19.
Причем подвижная рабочая губка 4 установлена на гибкой трубке, т.е. на корпусе 1, а глубина каждой проточки гибкой трубки и наконечника 9, т.е. проточек 12 и 13, составляет половину диаметра.
Кроме того, в наконечнике 9 выполнено сквозное отверстие 20 для стерилизации исполнительного органа.
Инструмент готовят к работе следующим образом.
Рычаг 8 перемещают вниз вдоль рукоятки 7. При этом второй продольный паз 18 плоской пружины попадает в выступ упора 19 и перемещается по всей своей длине до остановки. После этого ниппель 5 вместе с исполнительным органом, включающим гибкий корпус 1, вставляют во втулочное фиксирующее приспособление 6 в виде цанги до упорно-фиксирующей части, образованной кольцевой канавкой 11 в ниппеле 5.
Выступы 11 цанги втулочного фиксирующего приспособления 6 заскакивают в кольцевую канавку 11 ниппеля 5 и фиксируют исполнительный орган в рукоятке 7. Затем рычаг 8 перемещают вверх вдоль рукоятки 7, и прорезь 15 в рычаге 8 охватывает шейку 14 наконечника 9.
Инструмент готов к работе.
Работают гибким хирургическим инструментом следующим образом.
При заданной диспозиции производят настройку исполнительного органа на данный угол поворотом ниппеля 5 за его выступающую цилиндрическую наружную часть с насечкой. В исходном состоянии бранши рабочие губки 2 и 4 разомкнуты. Рукоятка 7 инструмента размещается внутри ладони хирурга и при подаче усилия от большого пальца на рычаг 8, преодолевая упругие свойств плоской пружины 17, которая формирует определенный ход инструмента, перемещают наконечник 9 вместе с тягой 3 и подвижной губкой 4 на ее конце в противоположном направлении. В результате этого обе рабочие губки 2 и 4 смыкаются. При освобождении рычага 8 от усилий пальца под действием плоской пружины 17 наконечник 9 вместе с тягой 3 перемещаются в исходное состояние, при этом рабочие губки 2 и 4 размыкаются. Благодаря проточкам 12 и 13 на полдиаметра трубки, т. е. корпуса 1 и наконечника 9, в месте из взаимодействия в момент продольного перемещения тяги 3 гарантируется надежное движение тяги без скручивания. Для смены вида инструментария (рабочих губок 2 и 4) достаточно оттянуть рычаг 8 вниз вдоль рукоятки 7, при этом прорезь 15 рычага 8 выходит из зацепления с шейкой 14 наконечника 9. После этого ниппель 5 с гибким корпусом 1 небольшим усилием вытаскивается из цанги втулочного приспособления 6 и разъединяют с рукояткой 7.
Для стерилизации гибкого исполнительного органа через отверстие 20 в наконечник 9 закачивается стерилизующая жидкость, которая протекает по наконечнику 9 и гибкой неподвижной трубке, т.е. корпусу 1, и вытекает через пазы в рабочих губках 2 и 4, промывая инструмент от операционных остатков и крови.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1995 |
|
RU2080095C1 |
| МИКРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1997 |
|
RU2124322C1 |
| УСТРОЙСТВО ДЛЯ МИКРОХИРУРГИЧЕСКИХ ВМЕШАТЕЛЬСТВ | 1997 |
|
RU2129840C1 |
| ИНСТРУМЕНТ ДЛЯ ОФТАЛЬМОХИРУРГИИ | 1994 |
|
RU2093125C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1995 |
|
RU2080830C1 |
| Устройство для расцепления железнодорожных вагонов | 1988 |
|
SU1564032A1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2005 |
|
RU2320276C2 |
| Устройство для удаления инородных тел из полого органа | 1989 |
|
SU1676602A1 |
| ПНЕВМОТУРБОДВИГАТЕЛЬ ДЛЯ ПРИВОДА РУЧНОГО ИНСТРУМЕНТА | 1996 |
|
RU2080454C1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
Использование: в медицине. Сущность изобретения: гибкий хирургический инструмент, содержит исполнительный орган в виде корпуса 1 с неподвижной рабочей губкой 2 и установленной внутри корпуса 1 соосной тяги 3, соединяющей подвижную рабочую губку 4 с приводным механизмом, имеющим соединенный с корпусом 1 поворотный направляющий ниппель 5, закрепленный во втулочном фиксирующем приспособлении 6, жестко связанным с рукояткой 7, соединенной с подпружиненным рычагом 8, размещенным с возможностью взаимодействия с тягой 3 посредством подвижного наконечника 9, при этом втулочное фиксирующее приспособление 6 выполнено в виде цанги с направителями 10, расположенными с возможностью взаимодействия с размещенной на ниппеле 5 кольцевой канавкой 11, корпус 1 выполнен в виде гибкой трубки с направляющей концевой проточкой 12 под ответную направляющую проточку 13, выполненную на наконечнике 9, имеющем также шейку 14 под прорезь 15 в рычаге 8, установленном с возможностью продольного перемещения в первом пазу 16, выполненном в рукоятке 7 и подпружиненной плоской пружиной 17, размещенной с возможностью взаимодействия вторым продольным пазом 18 с закрепленным на рукоятке 7 упором 19, при этом подвижная рабочая губка 4 установлена на гибкой трубке, а глубина проточек 12 и 13 составляет половину диаметра гибкой трубки корпуса 1 и наконечника 9. В результате достигается совершенствование конструкции инструмента и повышение его эксплуатационных свойств. 2 ил.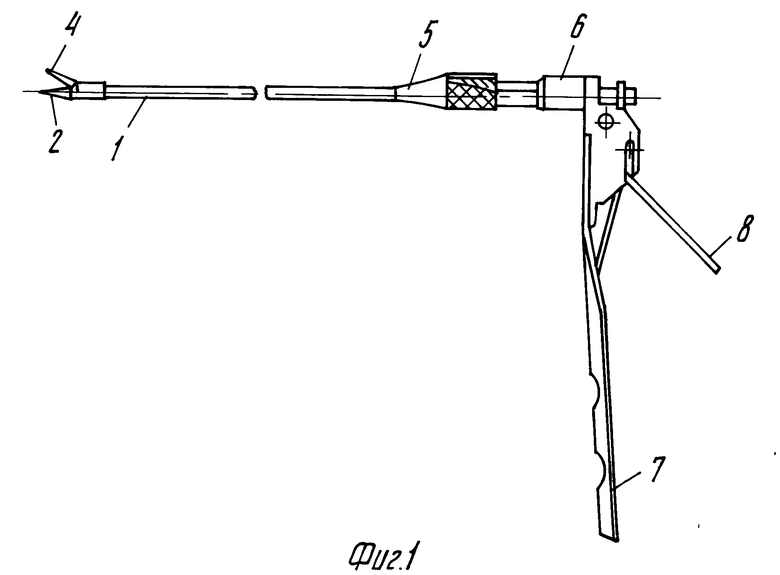
Гибкий хирургический инструмент, содержащий исполнительный орган в виде корпуса с неподвижной рабочей губкой и установленной внутри корпуса соосной тяги, соединяющей подвижную рабочую губку с приводным механизмом, имеющим соединенный с корпусом поворотный направляющий ниппель, закрепленный во втулочном фиксирующем приспособлении, жестко связанном с рукояткой, соединенной с подпружиненным рычагом, размещенным с возможностью взаимодействия с тягой посредством подвижного наконечника, отличающийся тем, что втулочное фиксирующее приспособление выполнено в виде цанги с направителями, расположенными с возможностью взаимодейстивия с размещенной на ниппеле кольцевой канавкой, при этом корпус выполнен в виде гибкой трубки с направляющей концевой проточкой под ответную направляющую проточку, выполненную на наконечнике, имеющем шейку под прорезь в рычаге, установленным в рукоятке и подпружиненным плоской пружиной, размещенной с возможностью взаимодействия вторым продольным пазом с закрепленным на рукоятке упором, подвижная рабочая губка установлена на гибкой трубке, а глубина каждой проточки гибкой трубки и наконечника составляет половину диаметра.
| SU, авторское свидетельство, 1082417, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
