Изобретение относится к железнодорожному транспорту, в частности к устройствам для расцепления железнб- дорожных вагонов.
Цель изобретения - повышение надежности.
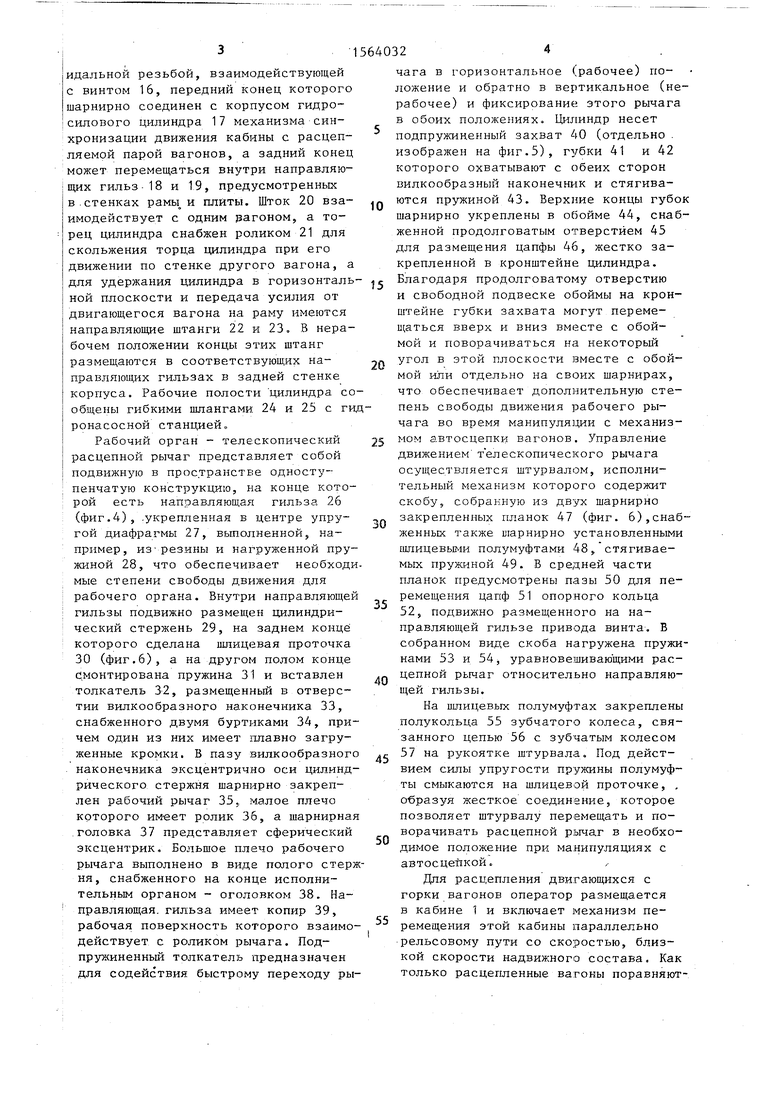
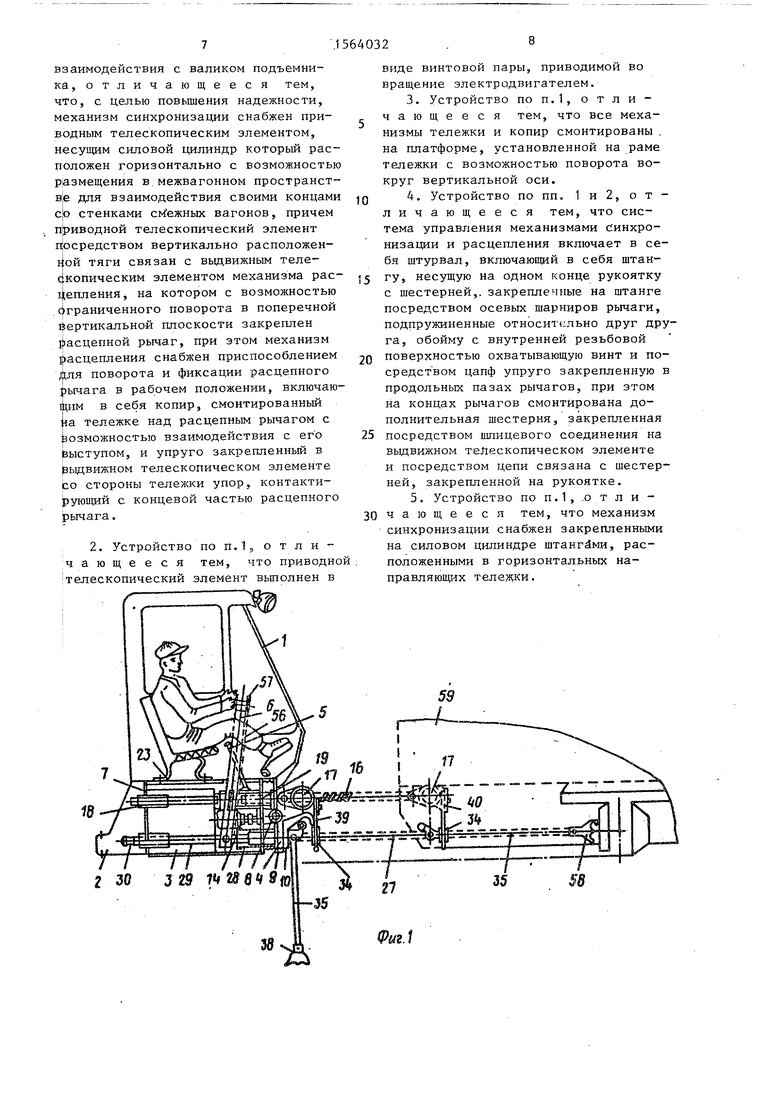
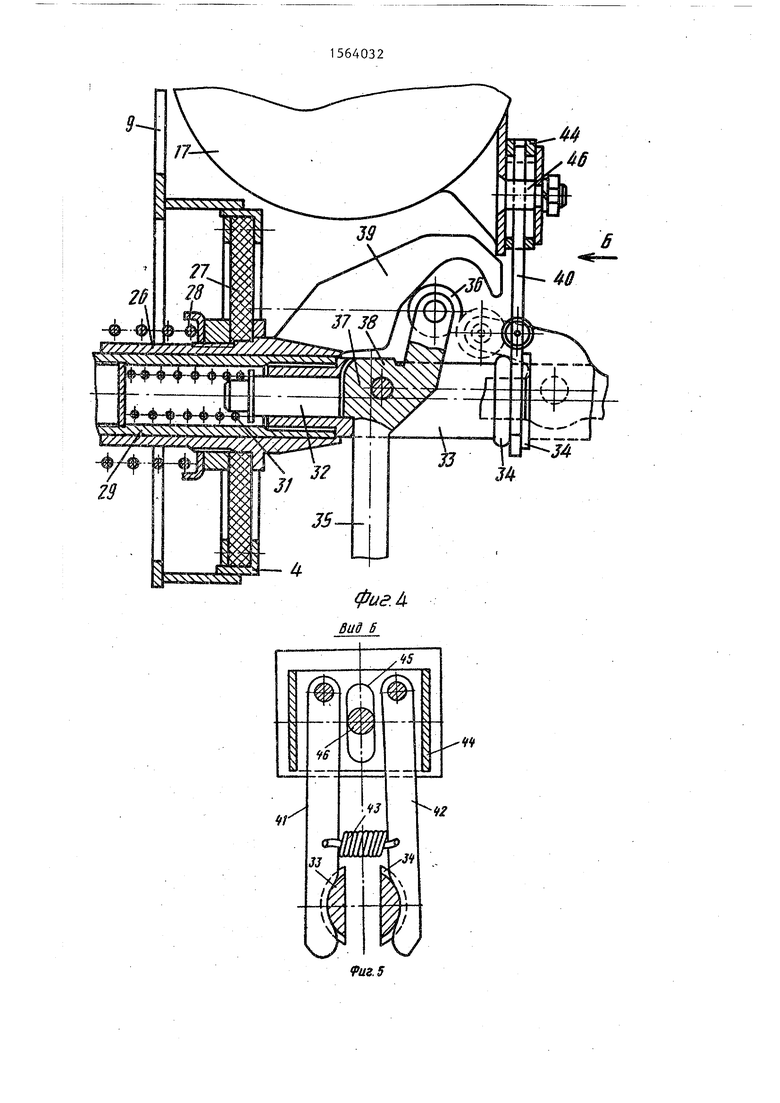
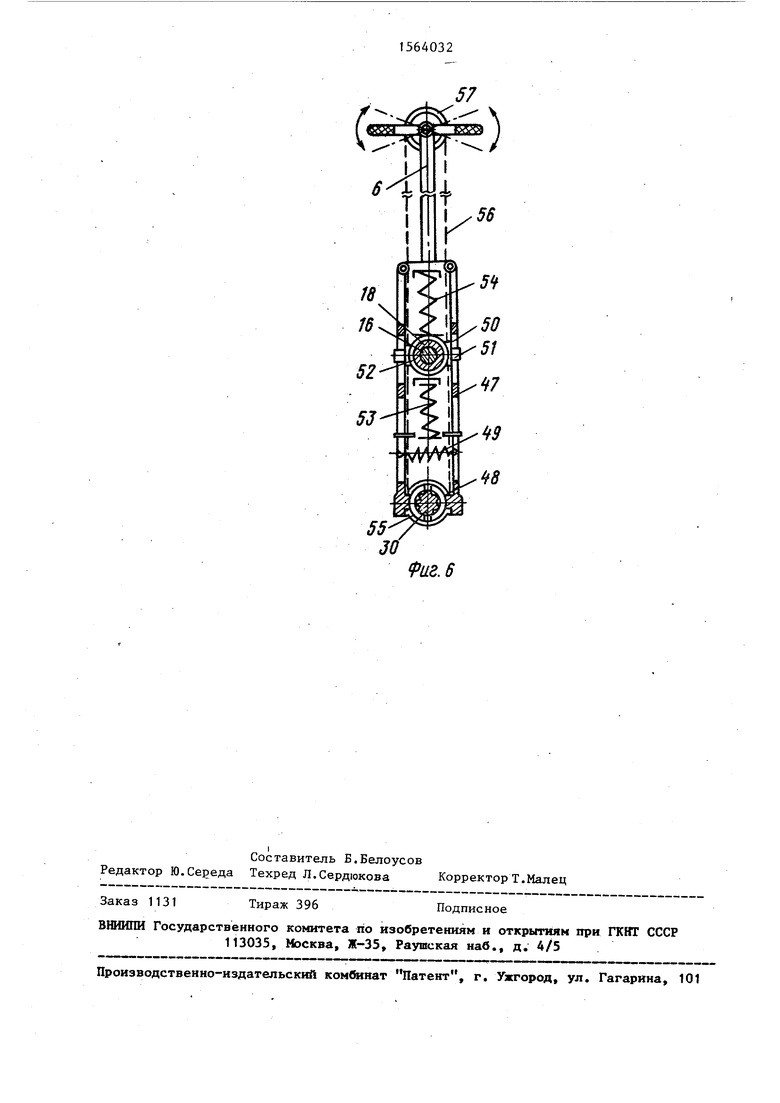
На фиг.1 схематично изображено предлагаемое устройство; на фиг.2 - то же, вид сверхуJ на фиг.З - вид А на фиг.2; на фиг.4 - узел фиксации расцепного телескопического рычага; на фиг.5 - вид Б на фиг.4; на фиг.6 - штурвал управления.
Устройство для расцепления железнодорожных вагонов содержит кабину 1, которая может перемещаться параллельно рельсовому пути по направляющей на тележке 2, снабженной механизмом перемещения. На тележке установлена гидронасосная станция 3, телескопический расцепной рычаг 4, являющийся
рабочим органом устройства, управляемого из кабины с помощью рукоятки 5 и штурвала 6. Кабина жестко установлена на раме 7, в кронштейне 8 которой шарнирно смонтирована лобовая плита 9, связанная пружинами 10 с рамой для обеспечения плавного поворота лобовой плиты на некоторый угол относительно рамы посредством гидроцилиндра 11, шток которого через шатун 12 связан с лобовой плитой (фиг.З), а гибкими шлангами 13 - с гидрона.сосной станцией.
Для перемещения рабочего органа в горизонтальной плоскости предусмотрен электромеханический привод 14, например электродвигатель постоянного тока, воздействующий через шестереночный понижающий редуктор на ведомое колесо 15, которое выполнено в виде гайки с многозаходной трапеце
идальной резьбой, взаимодействующей с винтом 16, передний конец которого шарнирно соединен с корпусом гидросилового цилиндра 17 механизма синхронизации движения кабины с расцепляемой парой вагонов, а задний конец может перемещаться внутри направляющих гильз 18 и 19, предусмотренных в стенках рамы, и плиты. Шток 20 взаимодействует с одним вагоном, а торец цилиндра снабжен роликом 21 для скольжения торца цилиндра при его движении по стенке другого вагона, а для удержания цилиндра в горизонтальной плоскости и передача усилия от двигающегося вагона на раму имеются направляющие штанги 22 и 23 В нерабочем положении концы этих штанг размещаются в соответствующих направляющих гильзах в задней стенке корпуса. Рабочие полости цилиндра сообщены гибкими шлангами 24 и 25 с гидронасосной станцией„
Рабочий орган - телескопический расцепной рычаг представляет собой подвижную в пространстве одноступенчатую конструкцию, на конце которой есть направляющая гильза 26 (фиг.4), укрепленная в центре упругой диафрагмы 27, выполненной, например, из резины и нагруженной пружиной 28, что обеспечивает необходимые степени свободы движения для рабочего органа. Внутри направляющей гильзы подвижно размещен цилиндрический стержень 29, на заднем конце которого сделана шлицевая проточка 30 (фиг.6), а на другом полом конце Смонтирована пружина 31 и вставлен толкатель 32, размещенный в отверстии вилкообразного наконечника 33, снабженного двумя буртиками 34, причем один из них имеет плавно загруженные кромки. В пазу вилкообразного наконечника эксцентрично оси цилиндрического стержня шарнирно закреплен рабочий рычаг 35, малое плечо которого имеет ролик 36, а шарнирная головка 37 представляет сферический эксцентрик. Большое плечо рабочего рычага выполнено в виде полого стержня, снабженного на конце исполнительным органом - оголовком 38. Направляющая, гильза имеет копир 39, рабочая поверхность которого взаимодействует с роликом рычага. Подпружиненный толкатель предназначен для содействия быстрому переходу ры
5
0
5
0
5
0
5
0
5
чага в горизонтальное (рабочее) положение и обратно в вертикальное (нерабочее) и фиксирование этого рычага в обоих положениях. Цилиндр несет подпружиненный захват 40 (отдельно изображен на фиг.5), губки 41 и 42 которого охватывают с обеих сторон вилкообразный наконечник и стягиваются пружиной 43. Верхние концы губок шарнирно укреплены в обойме 44, снабженной продолговатым отверстием 45 для размещения цапфы 46, жестко закрепленной в кронштейне цилиндра. Благодаря продолговатому отверстию и свободной подвеске обоймы на кронштейне губки захвата могут перемещаться вверх и вниз вместе с обоймой и поворачиваться на некоторый угол в этой плоскости вместе с обоймой или отдельно на своих шарнирах, что обеспечивает дополнительную степень свободы движения рабочего рычага во время манипуляции с механизмом автосцепки вагонов. Управление движением телескопического рычага осуществляется штурвалом, исполнительный механизм которого содержит скобу, собранную из двух шарнирно закрепленных планок 47 (фиг. 6),снабженных также шарнирно установленными шлицевыми полумуфтами 48, стягиваемых пружиной 49. В средней части планок предусмотрены пазы 50 для перемещения цапф 51 опорного кольца 52, подвижно размещенного на направляющей гильзе привода винта. В собранном виде скоба нагружена пружинами 53 и 54, уравновешивающими расцепной рычаг относительно направляющей гильзы.
На шлицевых полумуфтах закреплены полукольца 55 зубчатого колеса, связанного цепью 56 с зубчатым колесом 57 на рукоятке штурвала. Под действием силы упругости пружины полумуфты смыкаются на шлицевэй проточке, , образуя жесткое соединение, которое позволяет штурвалу перемещать и поворачивать расцепной рычаг в необходимое положение при манипуляциях с автосцетгкой.,
Для расцепления двигающихся с горки вагонов оператор размещается в кабине 1 и включает механизм перемещения этой кабины параллельно рельсовому пути со скоростью, близкой скорости надвижного состава. Как только расцепленные вагоны поравняются с кабиной 1, оператор рукояткой 5 включает привод 14, который приводит во вращение ведомое колесо 15, выдвигающее по направлению к расцеп - ляемым вагонам винт 16 вместе с гидросиловым цилиндром 17, который, в свою очередь, вытягивает из гильз 18 и 19 штанги 22 и 23. Одновременно цилиндр 17 своими захватом 40 тянет за собой цилиндрический стержень 29, буртики 34 которого за-, жаты между губками 41 и 42, и оператор вводит гидросиловой цилиндр 17 в межвагонное пространство (фиг. 2). При достижении крайнего выдвинутого положения перемещение гидроцилиндра 17 автоматически прекращается. Надвигающийся вагон будет воздействовать на торец гидроцилиндра 17, увлекая его и вместе с ним все устройство вдоль пути с той же скорость с какой этот вагон движется. Опущенный вниз рабочий рычаг 35 при перемещении гидроцилиндра 17 в направлении к автосцепке также переместится в этом направлении и его ролик 36 вступит во взаимодействие с крюкооб- разным концом копира 39, что приведет к быстрому повороту рабочего рычага 35 в горизонтальное положение, как это изображено на фиг.1 пунктиром. Подпружиненный толкатель 32 воздействует на плоскую часть оголовка 38, повернутого в горизонтальное положение рычага 35, ось которого с зщена вверх относительно оси тол- ггеля 32, чтг приводит к возник- - ению враЩе-чщего момента от толкателя 32s доворачивающего рычаг 35 в фиксированное рабочее положение (изображено пунктиром на фиг.4), при котором ролик 36 выходит из защеп- ления с копиром 39.
Манипулируя штурвалом 6, оператор подводит оголовок 58 к валику подъемника автосцепки 61. Для того, чтобы повернуть оголовок 58 вокруг горизонтальной оси с помощью рукояток штурвала 6 поворачивают на соответствующий угол зубчатое колесо 57, которое через цепь 56 повернет нижнее зубчатое колесо 55 вместе со шли- цевой проточкой 30 цилиндрического стержня 29, в вилкообразном наконечнике 33 которого укреплен рабочий рычаг 35 с оголовком 58. Вращающее воздействие оголовка 58 приводит к расцеплению вагонов 59 и 60 ёвтосце0
5
0
пок 61, а срабатывание гидроцилиндра 17, полость которого автоматически сообщается через гибкий шланг 24 с гидронасосной станцией 3, к выдвижению его штока 20 до упора в лобовой брус вагона 60. Если произошло расцепление, то вагоны 59 и 60 под действием гидроцилиндра 17 раздвинутся и зевы их автосцепок отойдут друг от друга.
Если этого не произойдет, то оператор устройства принимает меры к остановке нерасцепленных вагонов для устранения неисправности автосцепки.
Убедившись в правильности расцепления вагонов, оператор устройства движением штурвала 6 от себя отводит исполнительные органы от автосцепки и как только эти органы окажутся вне пределов габарита подвижного состава, произойдет автоматическое переключение движения кабины 1 вдоль рельсового пути. Отвод испол5 нительных органов в исходное (нерабочее) положение осуществляется также автоматически после перемещения рукоятки 5 назад, которая своими контактами переключает привод 14 на
0 вращение в обратном направлении и его ведомое колесо 15 втягивает винт 16 в направляющие гильзы 19 и 18. Гидросиловой цилиндр 17 при обратном движении своим захватом 40 потянет
с за собой рабочий рычаг 35 с оголовком 58 и как только ролик 36 снова , упрется в рабочую поверхность копира 39 и затем, взаимодействуя с ней, вынудит повернуться рабочий рычаг
0 35 вниз в его исходное положение, фиксируемое толкателем 32, воздействующим на сферическую поверхность шарнирной головки 37, стараясь повернуть рычаг 35 против часовой
5 стрелки.
Формула изобретения
1. Устройство для расцепления 0 железнодорожных вагонов, содержащее перемещающуюся вдоль рельсового пути тележку, несущую механизм синхронизации перемещения тележки относительно вагонов, включающий в себя j силовой цилиндр, и расцепной механизм. включающий в себя смонтированный на выдвижном в горизонтальном направлении телескопическом элементе расцепной рычаг с рабочей головкой для
взаимодействия с валиком подъемника, отличающееся тем, что, с целью повышения надежности, механизм синхронизации снабжен приводным телескопическим элементом, несущим силовой цилиндр который расположен горизонтально с возможностью размещения в межвагонном пространстве для взаимодействия своими концами cjo стенками см ежных вагонов, причем приводной телескопический элемент Посредством вертикально расположен- цчэй тяги связан с выдвижным теле- с;копическим элементом механизма рас- 1|(епления, на котором с возможностью Ограниченного поворота в поперечной Йертикальной плоскости закреплен расценкой рычаг, при этом механизм расцепления снабжен приспособлением йля поворота и фиксации расцепного рычага в рабочем положении, включаю- ibiM в себя копир, смонтированный ца тележке над расцепным рычагом с возможностью взаимодействия с его Ьыступом, и упруго закрепленный в (выдвижном телескопическом элементе со стороны тележки упор, контактирующий с концевой частью расцепного рычага.
2. Устройство по п. 1,, отличающееся тем, что приводной телескопический элемент выполнен в
виде винтовой пары, приводимой во вращение электродвигателем.
3. Устройство по п.1, о т л и чающееся тем, что все механизмы тележки и копир смонтированы . на платформе, установленной на раме тележки с возможностью поворота вокруг вертикальной оси.
4. Устройство по пп. 1 и 2, о т - личающееся тем, что система управления механизмами синхронизации и расцепления включает в себя штурвал, включающий в себя штан5 гу, несущую на одном конце рукоятку с шестерней,, закрепленные на штанге посредством осевых шарниров рычаги, подпружиненные относительно друг друга, обойму с внутренней резьбовой
0 поверхностью охватывающую винт и посредством цапф упруго закрепленную в продольных пазах рычагов, при этом на концах рычагов смонтирована дополнительная шестерня, закрепленная
5 посредством шлицевого соединения на выдвижном телескопическом элементе и посредством цепи связана с шестерней, закрепленной на рукоятке.
5. Устройство по п.1, о т л и - 0 чающееся тем, что механизм синхронизации снабжен закрепленными на силовом цилиндре штангами, расположенными в горизонтальных направляющих тележки.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для расцепления железнодорожных вагонов | 1981 |
|
SU960059A1 |
| Устройство автоматического расцепления железнодорожных вагонов | 1989 |
|
SU1766749A1 |
| УСТАНОВКА ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1991 |
|
RU2017641C1 |
| Устройство для автоматического расцепления движущихся вагонов | 1987 |
|
SU1416358A1 |
| Устройство для расцепления вагонов | 1988 |
|
SU1576390A1 |
| Устройство для автоматического расцепления вагонов | 1989 |
|
SU1722923A1 |
| Устройство автоматического расцепления автосцепок движущихся вагонов | 1983 |
|
SU1232546A1 |
| СПОСОБ РАСЦЕПЛЕНИЯ ВАГОНОВ | 1966 |
|
SU223132A1 |
| Устройство для автоматического расцепления вагонов | 1978 |
|
SU713738A1 |
| Устройство для автоматического расцепления вагонов на сортировочной горке | 1973 |
|
SU901124A1 |
Изобретение относится к железнодорожному транспорту, в частности к устройствам для расцепления железнодорожных составов. Цель изобретения - повышение надежности. Устройство движется параллельно подвижному составу. В кабине сидит оператор, манипулирующий расцепным телескопическим рычагом и расцепным рычагом с рабочим оголовком и воздействующий на валик автосцепки разъединяемых вагонов. После воздействия на автосцепку выдвигается шток гидроцилиндра, который введен в межвагонное пространство и используется для раздвижки вагонов друг от друга. 4 з.п.ф-лы, 6 ил.
2 зо з is п г$въ
h-J5
П fc/
35
zeowi
U
9
п в, г
LJIJL
У / / v
I
81 81
н
zeowi
Составитель Б.Белоусов Редактор Ю.Середа Техред Л.Сердюкова Корректор Т.Малец
Заказ 1131
Тираж 396
ВИНИЛИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. А/5
/j 23Skl
( щур MI №xw i
i
йи
Фиг. 6
Подписное
| Устройство для расцепления железнодорожных вагонов | 1981 |
|
SU960059A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
