Изобретение относится к технике, занимающейся разработкой систем, обеспечивающих подготовку и проведение залпового пуска самонаводящихся боеприпасов (например, противотанковых ракет) по площадным (групповым) целям с рассредоточенными внутри них объектами поражения (танки, самоходные пусковые установки ракет и др.).
Известно значительное количество систем, обеспечивающих предстартовую подготовку и пуск боеприпасов для поражения точечных и площадных целей: пат. США NN 5096139, 5275354, 4611711, 5042743, пат. Германии 4132233, заявка ФРГ 053734758.
Наиболее близким по технической сущности является устройство, используемое для управления ракетой по патенту США N5096139 (МКИ:F 41 G 7/22, 7/34), содержащее основной блок для получения информации о положении цели и выработки управляющих сигналов, обеспечивающих проверку ракеты и ее пуск, а также блок для подачи питания на ракету перед пуском и определение ее состояния. В основном блоке используется несколько плит, которые соединяются между собой и подключаются к другим компонентам устройства. В числе этих плат имеется плата тактического управления для обеспечения пуска. Через плату на ракету после пуска поступает информация о цели и информация наведения. Кроме того, устройство имеет платы обеспечения, преобразования аналоговых данных в цифровые сигналы, памяти, передачи тактических команд и сообщений на ракету через пусковой блок, ввода-вывода данных для связи между пусковым блоком и основным блоком, а также плата для связи между основным блоком и передатчиком.
Рассматриваемое устройство не решает задачи эффективного поражения элементов групповой цели, когда размер площади расположения группой цели превышает ширину зоны обзора головки самонаведения боеприпаса на заданной высоте его полета.
Целью изобретения является повышение эффективности поражения элементов площадной (групповой) цели путем обеспечения автоматического разведения боеприпасов по фронту при ширине площадной (групповой) цели, превышающей ширину зоны обзора их головок самонаведения на высоте полета боеприпаса.
Цель достигнута тем, что в известное устройство для управления пуском ракет с головками самонаведения, содержащее блок получения информации о положении цели, блок выработки управляющих сигналов, обеспечивающих пуск ракет, блок тактического управления для обеспечения пуска, введены последовательно соединенные блок хранения информации о ширине зоны обзора головки самонаведения, блок разности, второй вход которого соединен с блоком получения информации о положении цели, блок тактического управления для обеспечения пуска ракет содержит последовательно соединенные генератор тактовых импульсов, первую схему И, второй вход которой соединен с системой запуска ракет, первый счетчик импульсов, блок сравнения, ко второму входу которого подключен задатчик временных интервалов пуска ракет, второй счетчик импульсов, дешифратор, последовательно соединенные триггер, вход, которого соединен с выходом блока сравнения, схему НЕ, а также регистр назначенных к старту ракет, содержащий n-размерную группу элементов памяти, схему ИЛИ, первый и второй сумматоры, вторую, третью, четвертую и пятую схемы И, регистр хранения информации о приращении бокового отклонения, первый и второй выходы которого подключены к первым входам второй и третьей схем И соответственно, выходы которых подключены соответственно ко входам первого и второго сумматоров, выходы которых подключены соответственно к первым входам четвертой и пятой схем И, выходы которых подключены к первому и второму входам схемы ИЛИ, при этом выход триггера подключен ко вторым входам третьей и пятой схем И, выход схемы НЕ подключен ко вторым входам второй и четвертой схем И, третьи входы второй и третьей схем И подключены к выходу блока разности, блок выработки управляющих сигналов, обеспечивающих пуск ракет, содержит первую N-размерную группу элементов И, первые входы которых соединены соответственно с выходами дешифратора, а вторые - с выходами элементов памяти регистра назначенных к старту ракет блока тактического управления для обеспечения пуска, n-размерную группу схем задержки, входы которых соединены соответственно с выходами элементов И первой n-размерной группы, а выходы соединены соответственно с исполнительными элементами систем запуска двигателей ракет, вторую n-размерную группу элементов И, первые входы которых соединены соответственно с выходами элементов И первой n-размерной группы, вторые входы - с выходом схемы ИЛИ блока тактического управления для обеспечения пуска, выходы которых соединены с задатчиками бокового отклонения бортовых систем управления ракет.
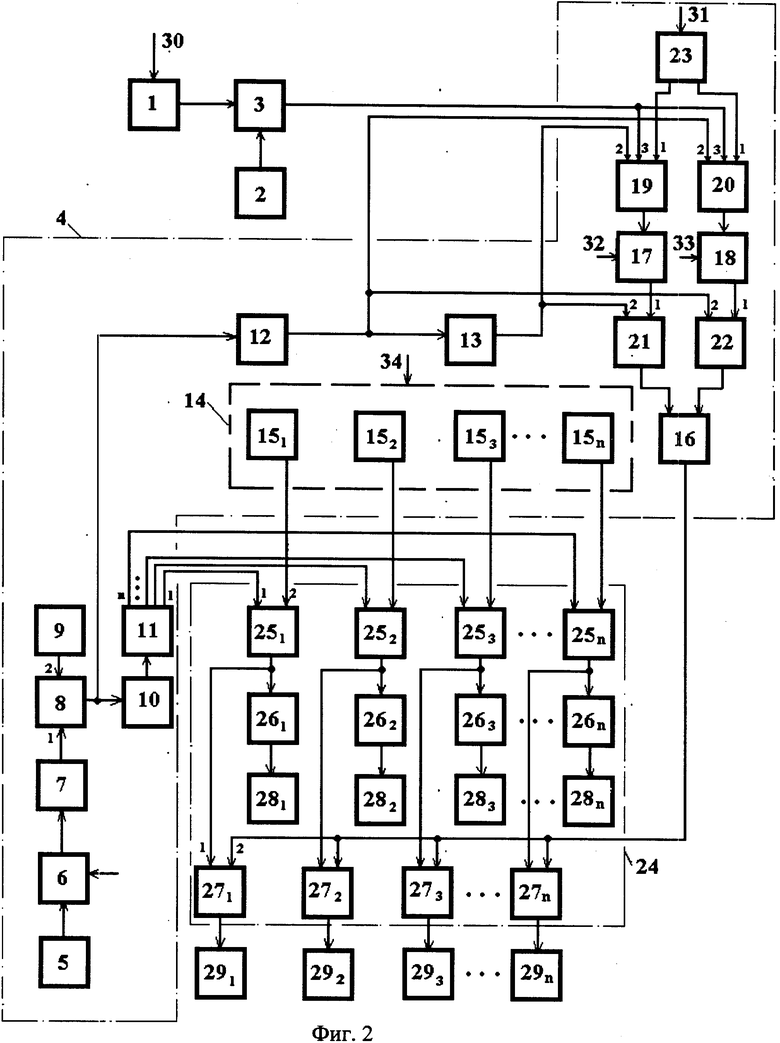
На фиг. 1 представлена схема разведения боеприпасов по фронту; на фиг, 2 - блок-схема устройства для управления пуском ракет с головками самонаведения.
Устройство для управления пуском ракет с головками самонаведения содержит в себе блок получения информации по положении цели 1, блок хранения информации о ширине зоны обзора головки свмонаведения 2, блок разности 3, блок тактического управления для обеспечения пуска 4, включающий в себя генератор тактовых импульсов 5, первую схему И 6, первый счетчик импульсов 7, блок сравнения 8, задатчик временных интервалов пуска ракет 9, второй счетчик импульсов 10, дешифратор 11, триггер 12, схему НЕ 13, регистр назначенных к старту ракет 14, содержащий N-размерную группу элементов памяти: 151...15n, схему ИЛИ 16, первый 17 и второй 18 сумматоры, вторую 19, третью 20, четвертую 21, пятую 22 схемы И, регистр хранения информации о приращении бокового отклонения 23; блок выработки управляющих сигналов, обеспечивающих пуск ракет 24, содержащий первую n-размерную группу элементов И: 251...25n-размерную группу схем задержки: 261...26n вторую n-размерную группу элементов И: 271.. . 27n; исполнительные элементы систем запуска двигателей ракет:281...28n, задатчики бокового отклонения бортовых систем управления ракет: 291...29n, входы устройства 30, 31, 32, 33.
Устройство работает следующим образом.
Предположим, что пусковая установка ракет, оснащенная ракетами с головками самонаведения (в общем случае подвижного базирования) находится на боевом дежурстве в заданном районе. В какой-то момент времени командир пусковой установки получает боевой приказ из вышестоящего командного пункта на поражение цели, которая в общем случае, может находиться вне зоны видимости и перемещаться. Одновременно командиру выдается целеуказание, которое (по радиоканалу) поступает на пусковую установку от боевой информационно-управляющей системы и заносится в бок 1 получения информации о положении цели. Возможны и другие каналы поступления целеуказания (речевой канал, оптический или тепловой снимок местности, доставленный командиру и др.) В общем случае может быть только разовое поступление целеуказания без последующего слежения за текущим положением цели. В состав информации о положении цели входят координаты центра площадной (групповой) цели, ее геометрические размеры (например, радиуса ядра), состав групповой цели и характеристики расположенных внутри нее объектов поражения (танки, пусковые установки), элементы движения цели (скорость азимут) и др. Командир по получении отмеченной информации делает топографическую привязку к местности своего текущего места положения, прогнозирует место положения центра цели на момент начала стрельбы 35 (см. фиг. 1) и определяет направление (плоскость) стрельбы 36. Далее отдает приказ экипажу на проведение подготовки к стрельбе (подъем пусковой установки, ее разворот, горизонтирование, задействование наземного электропитания, открытия крышек пусковых установок, предстартовую подготовку и проверку ракет и т.д.) Из анализа состава групповой цели командир выбирает нужное количество ракет, необходимых для надежного поражения цели, и назначает их к старту, записывая по входу 34 "единички" в соответствующие элементы памяти 151...15k регистра 14 назначенных к старту ракет (где k - количество выбранных для поражения цели ракет; n - максимальное количество ракет, размещаемых на пусковой установке: k ≤ n). Из анализа соотношения размеров площадной (групповой) цели 37 и ширины зоны обзора головки самонаведения, а также исходя из тактических соображений, учитывающих стиль и тактику действия противника, командир выбирает стратегию разведения ракет по фронту, назначает величину приращения бокового отклонения ΔZ и записывает ее ко входу 31 в регистр 23. К моменту завершения предстартовой подготовки и возможности начала стрельбы может оказаться, что прогнозируемое положение центра цели смещено по отношению к реальной выставленной средствами гироскопии плоскости стрельбы на величину Z0. Появление этого смещения может быть сопряжено или с уточнением реального положения центра групповой цели, или за счет погрешности выставки плоскости стрельбы 36 (см. фиг. 1) В этом случае командир через входы 32 и 33 вводит в сумматор 17 и 18 блока тактического управления 4 значения этой величины Z0. Если смещение центра цели по отношению к плоскости стрельбы 36 не произошло, то содержимое сумматоров 17 и 18 обнуляется. После описанных подготовительных операций осуществляется залповый пуск ракет. Из системы запуска подается разрушающий сигнал на второй вход схемы 6И (см. фиг. 2), и тактовые импульсы из генератора 5 тактовых импульсов начинают поступать на вход счетчика 7 импульсов, текущее состояние которого N поступает на вход блока сравнения 8. На второй вход этого блока поступает информация с задатчика 9 временных интервалов пуска ракет, выраженная в эквивалентном количестве импульсов N3. При сравнении (т.е. при выполнении условия N ≥ N3) на выходе блока 8 сравнения появляется сигнал, который поступает на вход второго счетчика 10 импульсов (пред пуском его содержания обнулено), откуда код поступает на вход дешифратора 11. После возбуждения первой выходной шины дешифратора 11 на первый вход И 251 первой n-разрядной группы поступает единичный сигнал. Одновременно сигнал с выхода блока сравнения 8 поступает на вход триггера 12 и инвертирует его выходное состояние. Предположим, например, что на выходе триггера 12 счформировалась "1" и разрешающий сигнал появился на вторых входах третьей 20 и пятой 22 схем И. Если ширина площадной цели B больше ширины зоны обзора ракеты b т.е. B>b, то на выходе блока 3 разности будет постоянно присутствовать разрешающий сигнал, который поступает на третьи входы второй 19 и третьей 20 схем И. При наличии разрешающих сигналов на втором и третьем входе схемы 20 И содержимое регистра 23 приращения бокового отклонения поступает на вход сумматора 18 прямым кодом и суммируется с содержимым сумматора 18. Т.е. его содержимое будет составлять Z0+ΔZ. . Эта информация через схему 22 И при наличии разрешающего сигнала на ее втором входе с выхода триггера 12 и через схему 16 ИЛИ поступает на вторые входы элементов И 271...27n второй n-размерной группы. Так как на первом входе элемента И251 присутствует сигнал с первой шины дешифратора 11, а на втором входе - сигнал с элемента памяти 151 регистра 14 назначенных к старту ракет, то на его выходе будет присутствовать сигнал, который поступает на первый вход элемента 271 И. Вследствие этого содержимое сумматора 18: Z0+ΔZ запишется в задатчик 291 бокового отклонения бортовой системы управления первой ракеты, из назначенных к старту. Блок 261 задержки, на вход которого поступил сигнал с выхода элемента 251 И, через заданное время сформирует сигнал, который поступит на вход 281 исполнительного элемента системы запуска двигателя первой ракеты, которая по определенной циклограмме осуществит запуск двигателя первой ракеты и ее старт. Величина времени задержки в блоках 261...26n выбирается из необходимости завершения описанных выше операций. Бортовая система управления ракетой, в которую введена информация для реализации заданной плоскости стрельбы при проведении предстартовой подготовки (в данном описании этот вопрос не рассматривается) в процессе полета отрабатывает полученное боковое отклонение. После переполнения счетчика 7 импульсов (в общем случает настраиваемого) он сбрасывается и начинает новый подсчет импульсов из генератора 5 тактовых импульсов. При выполнении условия сравнения (N ≥ N3) из блока 8 сравнения поступает второй импульс на вход счетчика 10 импульсов. Код с последнего поступает на вход дешифратора 11 и возбуждающего по описанной выше схеме разрешение на пуск второй ракеты. Одновременно второй импульс с блока 8 сравнения поступает на вход триггера 12 и инвертирует его выходное состояние (теперь его состояние будет "0"). Единичный сигнал со схемы НЕ поступает на вторые входы схем 19 и 21 И. Теперь содержимое регистра 23 приращения бокового отклонения через схему 19 И поступает на вход сумматора 17 обратным кодом и суммируется с его содержимым. Теперь содержимое сумматора будет составлять: Z0-ΔZ. . Эта информация через схему 21 И при наличии разрешающего сигнала на ее второй входе с выхода схемы НЕ и через схему 16 ИЛИ по описанной выше схеме будет записана задатчиком 292 бортовой системы управления второй ракеты, которая в процессе полета ракеты обеспечит ее боковое отклонение в противоположном по отношению к первой от плоскости стрельбы направления (см. фиг. 1). После прихода с блока сравнения третьего импульса суммирование произойдет вновь в сумматор 18 и его содержимое станет равным: Z0+2ΔZ и третья ракета будет совершать полет с двойным боковым отклонением, а четвертая - с двойным отклонением противоположного знака. По описанной выше схеме боковые отклонения ракет будут увеличиваться до пуска последней ракеты из числа назначенных к старту. Следует отметить, что если ширина цели меньше ширины зоны видимости головки самонаведения, то на схемах 19, 20 И не будет разрешающего сигнала из блока 3, содержимое сумматоров 17, 18 будет суммироваться с нулем и все ракеты будут запущены без приращения бокового отклонения.
Применение описанного устройства для управления пуском ракет с головками самонаведения в условиях, когда ширина площадной (групповой) цели с рассредоточенными внутри нее объектами поражения превышает ширину зоны видимости головки самонаведения на заданной высоте полета, позволит увеличить эффективность поражения цели путем автоматического разведения ракет по фронту.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ РАКЕТ С ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 1997 |
|
RU2113679C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ РАКЕТ | 1998 |
|
RU2151359C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИМЕНЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2241948C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИМЕНЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2221208C2 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СТРЕЛЬБЫ ГРУППЫ ПЕРЕНОСНЫХ ЗЕНИТНО-РАКЕТНЫХ КОМПЛЕКСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289083C2 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА | 1997 |
|
RU2138847C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БАЛЛИСТИЧЕСКОГО САМОНАВОДЯЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА "ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ" | 2002 |
|
RU2216708C1 |
| СПОСОБ НАЗЕМНОГО ИЛИ НАДВОДНОГО СТАРТА РАКЕТЫ С СИСТЕМОЙ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2096721C1 |
Использование: изобретение относится к вооружению, в частности, к системам, обеспечивающим подготовку и проведение залпового пуска самонаводящихся боеприпасов (например, противотанковых ракет) по площадным (групповым) целям с рассредоточенными внутри них объектами поражения (танки, самоходные пусковые установки ракет и др.) Сущность: устройство содержит блок получения информации о положении цели, блок выработки управляющих сигналов, обеспечивающих пуск боеприпаса, блок тактического управления для обеспечения пуска, блок вычисления разности между шириной площадной (групповой) цели и шириной зоны обзора головки самонаведения на высоте полета боеприпаса. В состав блока тактического управления введены задатчик интервалов пуска, регистр назначенных к старту боеприпасов, регистр хранения информации о приращении бокового отклонения, два сумматора. После анализа полученной информации о характере цели командир пусковой установки выбирает соответствующее количество боеприпасов, необходимых для поражения цели, и вносит их в регистр назначенных к пуску боеприпасов. При ширине площадной (группой) цели, превышающей ширину зоны обзора головки самонаведения, командир выбирает величину приращения бокового отклонения и записывает ее в регистр хранения информации о приращении бокового отклонения, которая в процессе залпового пуска циклически суммируется в двух сумматорах с положительным и отрицательным знаком. Накапливаемые значения приращений последовательно вводятся в задатчик бокового отклонения систем управления боеприпасов и через некоторое время, определяемое блоками задержки, происходят запуски их двигателей. В результате описываемое устройство обеспечит при залповой стрельбе автоматическое разведение боеприпасов по фронту путем последовательного увеличения бокового отклонения стартующих боеприпасов влево и вправо от центра цели. 2 ил.
Устройство для управления пуском ракет с головками самонаведения, содержащее блок получения информации о положении цели, блок выработки управляющих сигналов, обеспечивающих пуск ракет, блок тактического управления для обеспечения пуска, отличающееся тем, что в него введены последовательно соединенные блок хранения информации о ширине зоны обзора головки самонаведения, блок разности, второй вход которого соединен с блоком получения информации о положении цели, блок тактического управления для обеспечения пуска ракет содержит последовательно соединенные генератор тактовых импульсов, первую схему И, второй вход которой соединен с системой запуска ракет, первый счетчик импульсов, блок сравнения, к второму входу которого подключен задатчик временных интервалов пуска ракет, второй счетчик импульсов, дешифратор, последовательно соединенные триггер, вход которого соединен с выходом блока сравнения, схему НЕ, а также регистр назначенных к старту ракет, содержащий n-размерную группу элементов памяти, схему ИЛИ, первый и второй сумматоры, вторую, третью, четвертую и пятую схемы И, регистр хранения информации о приращении бокового отклонения, первый и второй выходы которого подключены к первым входам второй и третьей схем И соответственно, выходы которых подключены соответственно к входам первого и второго сумматоров, выходы которых подключены соответственно к первым входам четвертой и пятой схем И, выходы которых подключены к первому и второму входам схемы ИЛИ, при этом выход триггера подключен к вторым входам третьей и пятой схем И, выход схемы НЕ подключен к вторым входам второй и четвертой схем И, третьи входы второй и третьей схем И подключены к выходу блока разности, блок выработки управляющих сигналов, обеспечивающих пуск ракет, содержит первую n-размерную группу элементов И, первые входы которых соединены соответственно с выходами дешифратора, а вторые - с выходами элементов памяти регистра назначенных к старту ракет блока тактического управления для обеспечения пуска, n-размерную группу схем задержки, входы которых соединены соответственно с выходами элементов И первой n-размерной группы, а выходы соединены соответственно с исполнительными элементами систем запуска двигателей ракет, вторую n-размерную группу элементов И, первые входы которых соединены соответственно с выходами элементов И первой n-размерной группы, вторые входы - с выходами схемы ИЛИ блока тактического управления для обеспечения пуска, а выходы которых соединены с задатчиками бокового отклонения бортовых систем управления ракет.
| US, патент, 5096139, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |

