Изобретение относится к радиолокационным устройства измерения скорости, основанным на эффекте Допплера. Основная область его применения - в качестве контрольно-измерительных приборов для защиты конвейеров (ленточные, цепные, скребковые) от аварий и перегрузок.
В различных отраслях отечественной промышленности для контроля работы ленточных, скребковых и др. конвейеров или движущихся узлов механизмов используют устройства контроля скорости (УКС) и реле скорости (РС) разных модификаций. В качестве датчиков скорости для УКС и РС применяют тахогенераторные датчики УПДС, бесконтактные БКВ, магнитоиндуктивные ДМ и емкостные типа СУС. Для передачи момента движения на датчик скорости применяют прижимные ролики с крыльчаткой, либо крыльчатку, насаженную на два ведущего (ведомого) механизма, либо другое приспособление.
Типовое УКС содержит механический узел передачи момента движения, датчик скорости, входной узел, преобразователь, устройство сравнения, выходной блок. При движении, например, ленточного конвейера прижимной ролик соприкасается с лентой и с помощью крыльчатки, насаженной на вал ролика, возбуждает в датчике скорости переменный ток, частота которого пропорциональна скорости ленты. Трансформатор входного узла отделяет искробезопасную цепь датчика скорости от других узлов. Далее переменный сигнал преобразуется в напряжение и сравнивается с опорными напряжениями нижнего и верхнего пределов скорости. Если скорость ленты отличается от допустимой, входной блок выдает команду на остановку конвейера.
При эксплуатации на ряде объектов обнаружился малый ресурс работы УКС до отказа, почти на порядок меньший, чем ресурс самого оборудования. Причиной является механический узел передачи момента движения на датчик скорости. Например, в датчиках УПДС разрушается прижимное устройство с тахогенератором, прижимной ролик с крыльчаткой для датчиков ДМ, БКВ начинает проскальзывать и т.п. Заметим, что эти узлы находятся в зоне перемещения продукта, который их засоряет со временем и стопорит.
Емкостные датчики скорости имеют похожие недостатки и, кроме того, требуют близкого расположения (единицы сантиметров) к крыльчатке и ей подобным элементам, а также периодической подстройки.
Известны оптические и инфракрасные датчики (дальномеры), которые не применяют из-за воздействия на них пыли при работе механизма.
Наиболее близким аналогом являются широко известные допплеровские радиолокаторы - самолетные ДИСС, вертолетные ДИВ, автомобильные милицейские радары (известны антирадары к ним) типа "Фара", "Барьер-2" и другие.
Очевидна "классическая" обобщенная структурная схема таких радаров, содержащая приемопередающий блок с антенной (антеннами), устройство обработки допплеровских сигналов, выходной (измерительный) блок. Информация о скорости подается на автопилот, индикатор и т.п.
Использование известных радаров вместо УКС нецелесообразно ввиду их сложности и высокой стоимости по сравнению с УКС, существенно большими токами и напряжениями, чем допускает стандарт по искро- и взрывобезопасности, существенно отличными пределами измерений, что требует при состыковке с параметрами УКС иных технических решений.
Задачей, которую решает предлагаемое устройство, является возможность дистанционного (бесконтактного) измерения и контроля скорости объектов (ленточные и другие конвейеры, механические узлы) на малых расстояниях от единиц сантиметров до нескольких метров при обеспечении допустимых по стандартам безопасности электрических параметров. Изобретение позволяет исключить механические узлы для съема момента движения на ленточных конвейерах и других объектах, вынести устройство из зоны перемещения продукта, т.е. изолировать от взрывоопасной среды, существенно упростить монтаж и исключить затраты на обслуживание.
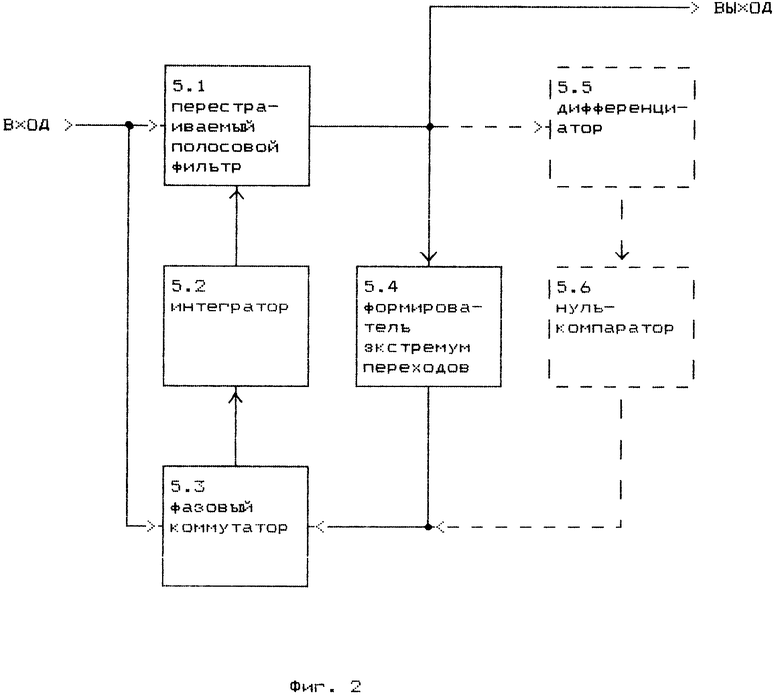
В состав предлагаемого устройства входят радарный датчик скорости, содержащий радиопрозрачную пластину, боковые стенки, приемопередающий интегральный модуль с микрополосковыми антеннами (МПА), последовательно соединенные усилитель-дифференциатор, широкодиапазонный следящий фильтр, нуль-компаратор, преобразователь частота - напряжение, устройство сравнения, выходной блок.
В качестве ближайшего аналога радиолокационного устройства контроля скорости ленточных конвейеров и движущихся или вращающихся узлов механизмов выбрано устройство, описанное в книге Колчинского В.Е. и др. "Допплеровские устройства и системы навигации" (Москва, Советское радио, 1975, стр. 360, 23, 237. 239), содержащее устройство обработки сигналов (в виде электронного блока), включающее следящий фильтр и нуль-компаратор (счетчик нулей в терминах источника), а также преобразователь частота - напряжение.
Радиопрозрачная пластина изолирует устройство от взрывоопасной зоны, в которую перемещается продукт, боковые стенки, как и в случае апертурных антенн, сужают суммарную диаграмму направленности МПА, что улучшает соотношение полезный сигнал/помеха. Применение МПА позволяет приблизить устройство на расстояние нескольких длин волн до движущейся цели, кроме того существенно снижаются габариты (обеспечивается компактность устройства). Приемопередающий интегральный модуль имеет допустимые по искробезопасности ток и напряжение. Усилитель-дифференциатор повышает устойчивость работы широкодиапазонного следящего фильтра, который в свою очередь обеспечивает работу устройства в широком диапазоне скорости движущихся объектов.
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг.2 - блок-схема широкодиапазонного следящего фильтра.
Датчик скорости (фиг.1) включает радиопрозрачную пластину 1, приемопередающий интегральный модуль с микрополосковыми антеннами 2, боковые стенки 3. Сигнал с модуля поступает на усилитель-дифференциатор 4 и далее на последовательно соединенные следящий фильтр 5, нуль-компаратор 6, преобразователь частота-напряжение 7, устройство сравнения 8, выходной блок 9.
Приемопередающий интегральный модуль (ППМ) с МПА в случае монтажа над ленточным конвейером устанавливается под некоторым углом так, чтобы принять сигнал радиальной скорости движения ленты. Угол наклона ППМ составляет примерно 40 - 60o и выбирается с учетом шероховатости ленты. Очевидно, что лента является слабым отражателем и ее колебания в поперечном направлении дают большую амплитуду в снимаемом с ППМ сигнале, чем сигнал от радиальной составляющей движения ленты. Усилитель-дифференциатор 4 взвешивает отраженный сигнал и ослабляет сигнал поперечной составляющей движения ленты так, чтобы обеспечить устойчивый захват полезного сигнала следящим фильтром 5. Очищенный сигнал скорости нормализуется нуль-компаратором 6 и подается на преобразователь частота-напряжение 7.
Устройство сравнения 8 работает в заданной зоне (например в УКС это 25% номинальной скорости ленточного конвейера) и в случае превышения (понижения) напряжения от заданного интервала на выходной блок 9 поступает сигнал выхода скорости объекта из заданной зоны. В выходном блоке 9 формируется определенная задержка, например 5 с, после чего блок 9 дает команду на выключение объекта.
Введение широкодиапазонного следящего фильтра 5 в предлагаемом устройстве можно обосновать тем, что контролируемые скорости объектов могут различаться на порядок и более. Поэтому следящий фильтр 5 позволяет монтировать устройство над разными объектами с различной скоростью без дополнительной регулировки. Очевидно также, что следящий фильтр плавно отслеживает сигнал контролируемой скорости и повышает устойчивость работы устройства при выдаче команды "Стоп".
На фиг. 2 представлен действующий вариант широкодиапазонного следящего фильтра, на который подана дополнительная заявка на изобретение (основная заявка N 94023456 от 08.07.94 г.). Перестраиваемый полосовой фильтр 5-1 управляется интегратором 5-2, на который поступает сигнал рассогласования от фазового коммутатора 5-2. Фазовый коммутатор 5-2 подключен одним входом к входу следящего фильтра и переключается выходным сигналом перестраиваемого полосового фильтра в моменты прохождения сигнала через экстремальные значения. Для этого используется формирователь экстремум-переходов 5-4. В качестве формирователя экстремум-переходов можно использовать дифференциатор 5-5 и нуль-компаратор 5-6 (показаны пунктиром). Предложенный вариант следящего фильтра может иметь диапазон перестройки до двух октав (сто раз).
Изготовлен действующий макет радиолокационного устройства контроля скорости, который включен на время испытаний в основную цепь работы оборудования ленточного вертикального конвейера (нории). Готовится аттестация опытных образцов устройств по искро- и взрывобезопасности. Оценена примерная потребительская стоимость устройства, которая в 5 - 10 раз меньше, чем стоимость ремонта силового агрегата, вышедшего из строя при аварии.
Авторы не имеют сведений об использовании устройств, подобных предлагаемому, на действующих производствах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 1997 |
|
RU2125715C1 |
| СПОСОБ РАДИОЛОКАЦИИ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ НЕПРЕРЫВНОГО ЗОНДИРУЮЩЕГО СИГНАЛА | 2002 |
|
RU2241241C2 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 1999 |
|
RU2159923C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2515191C2 |
| КОМПЛЕКС БОРТОВЫХ СРЕДСТВ ЦИФРОВОЙ СВЯЗИ | 2016 |
|
RU2627686C1 |
| СЛЕДЯЩИЙ КООРДИНАТОР ЦЕЛИ | 1993 |
|
RU2042101C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410729C1 |
| Радиолокационный уровнемер для измерения объема сыпучих продуктов в резервуарах | 2017 |
|
RU2653578C1 |
| ПРИЕМОПЕРЕДАЮЩАЯ СИСТЕМА АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И ЕЕ КОНСТРУКТИВ | 2001 |
|
RU2214614C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2007 |
|
RU2339925C1 |
Изобретение относится к системам контроля скорости и может быть использовано в устройствах, требующих соблюдения скоростного режима работы. Устройство контроля выполнено в виде последовательно соединенных датчика скорости, усилителя-дифференциатора, следящего фильтра, нуль-компаратора, преобразователя частота - напряжение, устройства сравнения и блока формирования команды на выключение ленточных конвейеров или механизмов. 2 ил.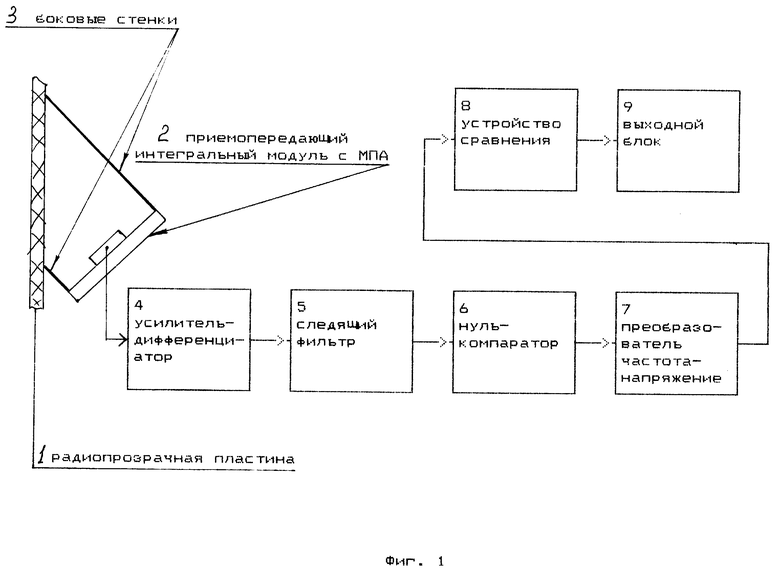
Радиолокационное устройство контроля скорости ленточных конвейеров и движущихся или вращающихся узлов механизмов, содержащее датчик скорости, связанный с устройством обработки сигнала, выполненного в виде последовательно соединенных следящего фильтра, нуль-компаратора, преобразователя частота-напряжение, отличающееся тем, что датчик скорости содержит микрополосковые антенны, радиопрозрачную пластину, изолирующую устройство от взрывоопасной зоны, боковые стенки для сужения суммарной диаграммы направленности микрополосковых антенн, а также введен усилитель-дифференциатор, подключенный по входу к датчику скорости, а по выходу - к входу следящего фильтра, причем выход преобразователя частота-напряжение подключен к введенному устройству сравнения, выход которого связан с выходным блоком, формирующим команду на выключение ленточных конвейеров или механизмов.
| Колчинский В.Е | |||
| и др., Допплеровские устройства и систенавигации.-М.: Сов.радио, 1975, с.23, 237, 239, 360. |

