Изобретение относится к радиолокации, а именно к способам измерения расстояния с помощью частотно-модулированного непрерывного сигнала, и может быть использовано в радиолокационных высотомерах, уровнемерах, для зондирования сред с большим затуханием и ограниченной полосой радиопрозрачности (георадары, радары морского льда) и пр.
Способ радиолокации с излучением частотно-модулированных непрерывных колебаний заключается в следующем. Частота зондирующего сигнала, излучаемого передатчиком, модулируется по определенному закону в зависимости от времени. Отраженный от цели, расстояние до которой требуется определить, сигнал принимается антенной и направляется в смеситель, где смешивается с опорным сигналом, в качестве которого используется часть зондирующего сигнала. На выходе смесителя выделяется разностный сигнал, частота которого пропорциональна расстоянию до цели. Затем разностный сигнал усиливается и подвергается обработке, заключающейся в выделении из сложного сигнала гармонической составляющей.
Время распространения сигнала от передатчика до приемника пропорционально разности частот отраженного и зондирующего сигнала. Чем больше девиация частоты зондирующего сигнала за данный интервал времени, тем выше точность измерения времени.
Одним из факторов, влияющих на точность измерения и разрешающую способность, является ошибка измерения, обусловленная скачком фазы, возникающим из-за неопределенности начальной и конечной фаз кусочных гармоник разностной частоты. При измерении больших расстояний неточность, обусловленная ошибкой квантования, как правило, не имеет практического значения; при измерении малых расстояний она играет существенную роль.
Известен способ радиолокации, заключающийся в частотной модуляции непрерывного зондирующего сигнала, приеме отраженного от цели сигнала, смешении его с частью зондирующего сигнала, выделении сигнала разностной частоты с последующим усилением и обработкой, включающей операции подавления скачка начальной и конечной фаз, и определении дальности до цели [1].
В известном способе для устранения влияния скачка начальной и конечной фазы на результаты измерения используют паузу между периодами модулирующего напряжения, что позволяет уменьшить влияние переходных процессов в процессе фильтрации сигнала разностной частоты и тем самым частично снизить погрешность, обусловленную неопределенностью конечной фазы сигнала. Однако это достигается за счет снижения добротности используемого фильтра. Кроме того, известный способ не устраняет полностью влияние на результаты измерений скачка начальной фазы кусочно-гармонического сигнала разностной частоты.
Ближайшим техническим решением к заявляемому способу по достигаемому результату является способ радиолокации, заключающийся в частотной модуляции непрерывного зондирующего сигнала по линейному несимметричному закону, приеме отраженного от цели сигнала, смешении его с частью зондирующего сигнала, выделении сигнала разностной частоты, усилении и обработке сигнала с целью подавления скачка начальной и конечной фаз [2].
Обработка сигнала осуществляется следующим образом. Сигнал разностной частоты подвергается т.н. быстрому Фурье-преобразованию (являющемуся аналогом узкополосной дискретной фильтрации), в результате чего происходит разложение спектра сигнала на отдельные гармоники. Затем спектр анализируется с выделением гармоники с максимальной амплитудой. Подавление скачка начальной и конечной фаз выделенной гармоники осуществляется путем изменения амплитуды модулирующего напряжения Um и поиска значения Um, которому соответствует максимальная амплитуда выделенной гармоники.
Основным недостатком известного способа является то, что он полностью не устраняет влияния скачка начальной и конечной фазы на результаты измерения, т.е. не обеспечивает контролируемую фазовую сшивку кусочно-гармонического сигнала. Кроме того, известный способ сложен при реализации, особенно при наличии помех, требует большого объема вычислений и, соответственно, большого времени. Погрешность способа и, как следствие, точность измерения и разрешающая способность ограничены числом точек Фурье-преобразования.
Задача, решаемая изобретением, - повышение точности измерения и разрешающей способности и упрощение способа радиолокации с частотной модуляцией непрерывного зондирующего сигнала.
Указанная задача решается тем, что в способе радиолокации с частотной модуляцией зондирующего непрерывного зондирующего сигнала, включающем передачу частотно-модулированного непрерывного зондирующего сигнала к пели, прием отраженного от цели сигнала, смешение его с частью зондирующего сигнала, выделение сигнала разностной частоты с последующим усилением и обработкой, включающей операции подавления скачка начальной и конечной фаз и определения дальности до цели, операцию подавления скачка начальной и конечной фаз осуществляют посредством фильтрации сигнала разностной частоты, фазового перемножения отфильтрованного гармонического сигнала разностной частоты с продифференцированным сигналом разностной частоты и изменения знака развертки модулирующего напряжения в моменты времени, соответствующие экстремумам отфильтрованного гармонического сигнала разностной частоты.
Изменение знака развертки модулирующего напряжения осуществляют посредством формирования из отфильтрованного гармонического сигнала разностной частоты меандра, фронты которого соответствуют экстремумам отфильтрованного сигнала, и выработки из фронтов меандра сигналов управления синхронизацией развертки модулирующего напряжения.
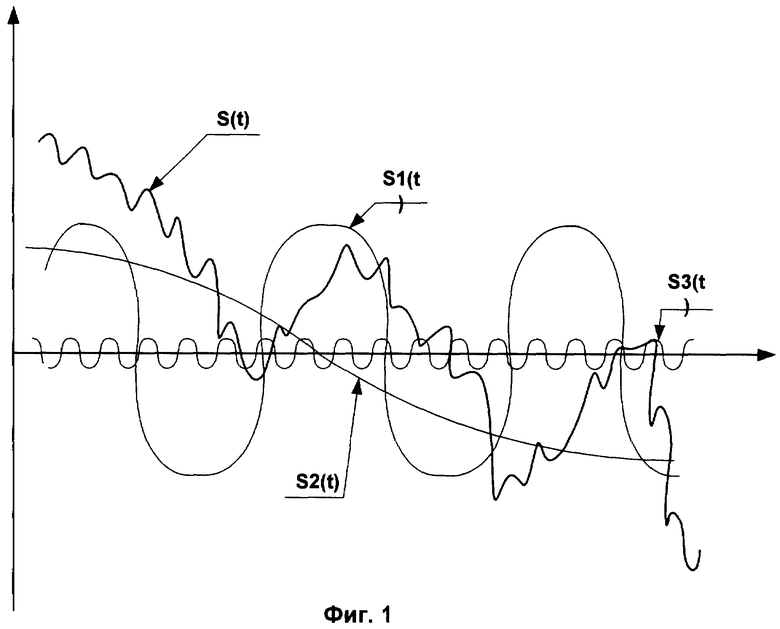
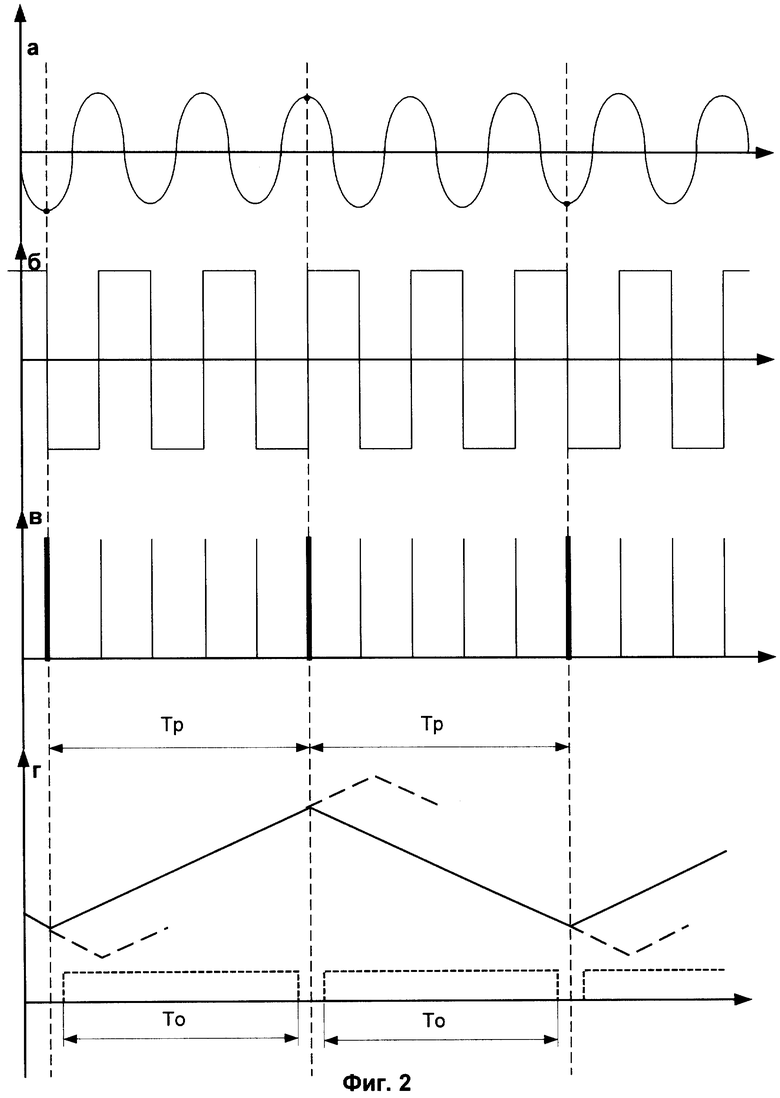
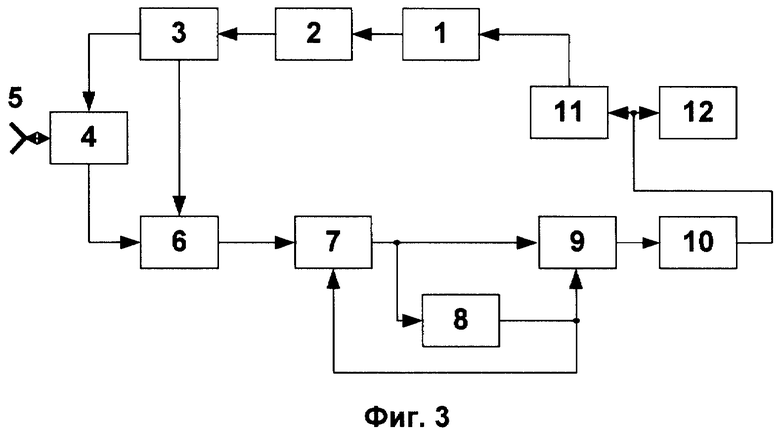
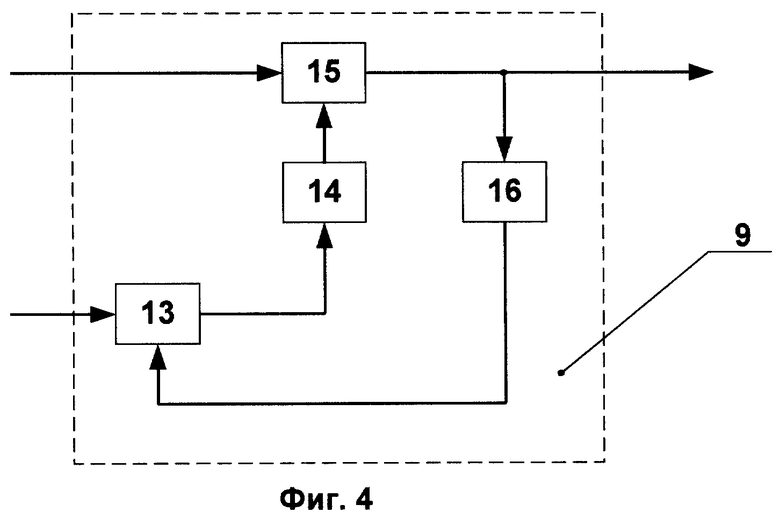
Изобретение иллюстрируется графическими материалами. На фиг.1 приведена форма сигнала разностной частоты; на фиг.2а-г показаны временные эпюры, поясняющие предлагаемый способ; на фиг.3 показана блок-схема устройства, реализующего заявляемый способ; на фиг.4 приведен пример реализации следящего фильтра.
Устройство для реализации заявляемого способа включает модулятор 1, выходной каскад которого выполнен в виде усилителя постоянного тока (УПТ), соединенного с входом передатчика 2, имеющего относительно медленный дрейф частоты (достаточную мгновенную стабильность) и соединенного выходом с направленным ответвителем 3, подключенным к циркулятору 4, связанному с приемно-передающей антенной 5, смеситель 6, вход которого подключен к циркулятору 4, а выход - к входу усилителя 7, выход которого соединен с входом дифференциатора 8 и первым входом следящего фильтра 9, второй вход которого соединен с выходом дифференциатора 8, а выход подключен к входу формирователя экстремального сигнала (экстрематора) 10, выход которого соединен с входом формирователя импульсов 11, подключенного выходом к входу синхронизации модулятора 1. Выход дифференциатора 8 соединен с входом регулировки усилителя 7, что обеспечивает автоматическую регулировку усиления усилителя 7. Выход формирователя экстремального сигнала 10 соединен с входом частотомера 12, измеряющего количество периодов отфильтрованного полезного сигнала и определяющего дальность до цели.
Следящий фильтр содержит квадратурный фазовый перемножитель 13, первый вход которого соединен с выходом дифференциатора 8, а выход - с входом интегратора - усилителя ошибки 14, выход которого подключен к входу управления полосового перестраиваемого фильтра 15, сигнальный вход которого соединен с выходом усилителя 7, а выход, являющийся выходом следящего фильтра 9, подключен к входу нуль-компаратора 16, связанного выходом со вторым входом перемножителя 13.
Заявляемый способ реализуется следующим образом.
Модулятор 1, вырабатывающий линейно-симметричное пилообразное напряжение, управляет частотой излучаемых передатчиком 2 высокочастотных сигналов. Зондирующий частотно-модулированный (ЧМ) сигнал передается посредством антенны 5 по направлению к цели, расстояние до которой требуется определить, отражается от цели, принимается антенной 5 и через циркулятор 4 направляется в смеситель 6, где смешивается с частью опорного ЧМ-сигнала, в результате чего возникает сигнал разностной частоты, представляющий собой кусочно-ограниченный гармонический сигнал, в котором присутствуют полезный сигнал S1(t), несущий информацию о дальности до цели, паразитный сигнал S2(t) и сигнал помехи S3(t). Начальная и конечная фаза разностного сигнала не известны.
В усилителе 7 осуществляется линейное усиление сигнала разностной частоты, который с выхода усилителя 7 поступает на первый вход следящего фильтра 9 и на вход дифференциатора 8, осуществляющего дифференцирование сигнала и, как следствие, поворот всего спектра сигнала на 90 град. С выхода дифференциатора 8 сигнал поступает на второй вход следящего фильтра 9.
В следящем фильтре 9 происходит фазовое перемножение отфильтрованного и продифференцированного сигналов разностной частоты, что обеспечивает нулевой фазовый сдвиг фильтра на частоте полезного сигнала и его настройку на наиболее интенсивную гармонику спектра.
С выхода следящего фильтра 9 отфильтрованный гармонический сигнал (фиг.1а) поступает на вход формирователя экстремального сигнала 10, который формирует из него двуполярный прямоугольный сигнал (меандр), фронты которого соответствуют максимумам и минимумам гармонического сигнала (фиг.1б). Выходной сигнал формирователя 10 в виде меандра поступает на вход формирователя импульсов 11, который из выходных фронтов меандра вырабатывает короткие управляющие импульсы, поступающие на вход внешней синхронизации модулятора 1 (фиг.1в), в результате чего развертка, не доходя до крайней верхней или нижней точки, изменяет знак (фиг.1г). Следует отметить, что модулятор 1 характеризуется заранее задаваемым окном нечувствительности, на протяжении которого изменения знака развертки при подаче на вход внешней синхронизации управляющих импульсов не происходит, так как в этом окне внешняя синхронизация отключается. Длительность То окна нечувствительности меньше периода развертки Тp и выбирается из условия установления колебаний в полосовом перестраиваемом фильтре 15. Выполнение выходного каскада модулятора 1 в виде УПТ позволяет сохранить постоянную составляющую в любой точке при повороте знака модуляции.
Заявляемый способ позволяет реализовать фазовую сшивку кусочно-гармонического сигнала и исключить влияние скачка начальной и конечной фазы. В начале линейной развертки значение начальной фазы ϕ полезного сигнала не известно, но в дальнейшем с продолжением развертки после завершения переходного процесса в фильтре фаза отфильтрованного сигнала становится определенной. Отсутствие фазового сдвига в процессе фильтрации позволяет остановить развертку до того, как ее амплитуда достигнет максимального значения Um, и повернуть ее в обратную сторону. Указанный поворот производится в моменты появления экстремумов полезного сигнала, удовлетворяющие условию ϕ=±π/2. Таким образом, конечная фаза в точках ϕ=±π/2 становится начальной для нового цикла модуляции. Скачок фаз исчезает и сигнал из кусочного превращается в непрерывный.
Предлагаемую фазовую сшивку сигнала можно производить в пределе до одного полупериода разностного сигнала.
Предлагаемый способ позволяет по сравнению с прототипом повысить точность измерения и разрешающую способность способа радиолокации с частотной модуляцией непрерывного сигнала как при определении малых дальностей, когда период сигнала приближается к периоду/полупериоду модулирующего напряжения, так и в случае измерения больших расстояний, поскольку при отсутствии скачка фаз можно использовать более добротные фильтры, избегая продолжительных переходных процессов.
Еще одним достоинством способа по сравнению с прототипом является более простой алгоритм устранения скачка начальной и конечной фаз. Замена сложных операций Фурье-преобразования и анализа спектра сигнала на существенно менее сложные и трудоемкие операции фильтрации сигнала и управления модулирующим напряжением позволяет упростить как обработку принимаемого сигнала, так и весь способ в целом.
Заявляемый способ может быть эффективно использован:
- в радиолокационных высотомерах и уровнемерах;
- в системах безопасности дорожного движения, в частности в микроволновых доплеровских радарах с полосой девиации частоты порядка единиц МГц;
- в радарах для зондирования сред большим затуханием радиоволн и ограниченной полосой радиопрозрачности (георадары, радары морского льда и др.).
Источники информации
1. Патент США № 5016016, кл. 342/87, 1991 г.
2. Патент ЕПВ № 647857, кл. G 01 S 13/34, 1998 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 1999 |
|
RU2159923C1 |
| РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР | 1999 |
|
RU2151408C1 |
| СПОСОБ ИМИТАЦИИ ДВУХЧАСТОТНЫХ РАДИОСИГНАЛОВ | 2012 |
|
RU2485541C1 |
| Способ определения скорости объекта в доплеровской радиолокации | 2016 |
|
RU2709626C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2003 |
|
RU2234717C1 |
| СПОСОБ РАДИОПРОТИВОДЕЙСТВИЯ | 2012 |
|
RU2485539C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1992 |
|
RU2044331C1 |
| СПОСОБ ПОДДЕРЖАНИЯ КОГЕРЕНТНОСТИ МОДУЛИРОВАННЫХ РАДИОСИГНАЛОВ | 2012 |
|
RU2476984C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КОНТРОЛЯ СКОРОСТИ ЛЕНТОЧНЫХ КОНВЕЙЕРОВ И ДВИЖУЩИХСЯ (ВРАЩАЮЩИХСЯ) УЗЛОВ МЕХАНИЗМОВ | 1995 |
|
RU2109305C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ РАДИОЭЛЕКТРОННЫМ СИСТЕМАМ УПРАВЛЕНИЯ | 2012 |
|
RU2483341C1 |
Изобретение относится к радиолокации, а именно к способам измерения расстояния с помощью частотно-модулированного непрерывного сигнала, и может быть использовано в радиолокационных высотомерах, уровнемерах, для зондирования сред с большим затуханием и ограниченной полосой радиопрозрачности, (георадары, радары морского льда) и пр. Использование изобретения позволяет повысить точность измерения и разрешающую способность и упростить способ радиолокации с частотной модуляцией непрерывного зондирующего сигнала, что и является достигаемым техническим результатом. Предлагаемый способ включает передачу частотно-модулированного непрерывного зондирующего сигнала к цели, прием отраженного от цели сигнала, смешение его с частью зондирующего сигнала, выделение сигнала разностной частоты с последующей фильтрацией, фазовое перемножение отфильтрованного гармонического сигнала разностной частоты с продифференцированным сигналом разностной частоты и изменение знака развертки модулирующего напряжения в моменты времени, соответствующие экстремумам отфильтрованного гармонического сигнала разностной частоты, посредством формирования из отфильтрованного гармонического сигнала разностной частоты меандра, фронты которого соответствуют экстремумам отфильтрованного сигнала, и выработки из фронтов меандра сигналов управления синхронизацией развертки модулирующего напряжения. 1 з.п. ф-лы, 4 ил.
| Триггер со счетным входом | 1977 |
|
SU647857A1 |

