Изобретение относится к следящим гироскопическим координаторам цели систем самонаведения управляемых объектов и может быть использовано при создании новых и модернизации существующих систем наведения управляемых объектов.
Известен оптический следящий координатор цели, содержащий оптически прозрачное защитное устройство, оптическую систему, оптический фильтр, модулирующий растр, приемник лучистой энергии, электронный тракт, усилитель мощности, гиростабилизированную платформу с двумя моментными датчиками, внешнюю и внутреннюю рамы, причем оптически прозрачное защитное устройство установлено в начале носовой части корпуса объекта, оптическая система, оптический фильтр, модулирующий растр и приемник лучистой энергии установлены на внутренней раме со стороны носовой части корпуса объекта, гиростабилизированная платформа установлена во внутренней раме, внутренняя рама установлена во внешней раме с возможностью вращения относительно внешней рамы вокруг оси, перпендикулярной продольной оси объекта, внешняя рама установлена в корпусе объекта с возможностью вращения внешней рамы относительно корпуса вокруг оси, перпендикулярной оси вращения внутренней рамы, выход приемника лучистой энергии электрически соединен с входом электронного тракта, первый выход электронного тракта электрически соединен с первым входом блока формирования управляющего сигнала и с первым входом усилителя мощности, второй выход электронного тракта электрически соединен с вторым входом блока формирования управляющего сигнала и с вторым входом усилителя мощности, первый выход усилителя мощности электрически соединен с первым моментным датчиком, а второй выход усилителя мощности электрически соединен с вторым моментным датчиком.
Недостатком этого координатора является сравнительно небольшая дальность его действия.
Известен также радиотехнический гироскопический следящий координатор цели, наиболее близкий к изобретению по технической сущности и содержащий радиопрозрачный обтекатель конической или оживальной формы, антенное устройство, приемник, усилитель мощности, гиростабилизированную платформу с двумя моментными датчиками, внутреннюю раму и внешнюю раму, причем радиопрозрачный обтекатель установлен в начале носовой части корпуса объекта, антенное устройство установлено на внутренней раме со стороны носовой части корпуса объекта, гиростабилизированная платформа установлена во внутренней раме, внутренняя рама установлена во внешней раме с возможностью вращения относительно внешней рамы вокруг оси, перпендикулярной продольной оси корпуса объекта, внешняя рама установлена в корпусе объекта с возможностью вращения относительно корпуса вокруг оси, перпендикулярной оси вращения внутренней рамы, выход антенного устройства электрически соединен с входом приемника, первый выход приемника электрически соединен с первым входом блока формирования управляющего сигнала и с первым входом усилителя мощности, второй выход приемника электрически соединен с вторым входом блока формирования управляющего сигнала и с вторым входом усилителя мощности, первый выход усилителя мощности электрически соединен с первым моментным датчиком, а второй выход усилителя мощности электрически соединен с вторым моментным датчиком.
Недостатком этого координатора является сравнительно невысокая точность измерения им угловой скорости вращения в пространстве вектора дальности объекта до цели, обусловленная значительными случайными флуктуациями радиосигнала, приходящего от цели. Причиной этого являются значительные случайные флуктуации радиотехнического сигнала, поступающего на координатор от цели, обусловленные сложным характером отражения радиоволн от цели, имеющей сложную конфигурацию.
Цель изобретения заключается в повышении точности измерения угловой скорости вращения в пространстве вектора дальности объекта до цели при обеспечении большой дальности действия координатора.
Это достигается тем, что в следящий координатор цели, содержащий радиопрозрачный обтекатель, антенное устройство, приемник, гиростабилизированную платформу с моментными датчиками, внутреннюю раму, внешнюю раму и усилитель мощности, причем радиопрозрачный обтекатель установлен в начале носовой части корпуса объекта, антенное устройство установлено на внутренней раме со стороны радиопрозрачного обтекателя, гиростабилизированная платформа установлена во внутренней раме, внутренняя рама установлена во внешней раме с возможностью вращения относительно внешней рамы вокруг оси, перпендикулярной продольной оси корпуса объекта, выход антенного устройства электрически соединен с входом приемника, первый выход усилителя мощности электрически соединен с одним моментным датчиком, а второй выход усилителя мощности электрически соединен с другим моментным датчиком, дополнительно введены оптически прозрачное защитное устройство, оптическая система, состоящая из основного зеркала, контррефлектора и рефлектора, оптического фильтра, модулирующего растра, приемника лучистой энергии, электронного тракта, вилки, двигателя поворота вилки, измерителя угла поворота внешней рамы, блока анализа, реле переключения и блока включения двигателя поворота вилки, причем оптически прозрачное защитное устройство установлено в корпусе объекта за радиопрозрачным обтекателем, оптическая система, оптический фильтр, модулирующий растр и приемник лучистой энергии установлены на внутренней раме противоположно месту установки антенной системы, внешняя рама установлена в вилке с возможностью вращения относительно вилки вокруг оси, перпендикулярной продольной оси объекта и оси вращения внутренней рамы, вилка установлена в корпусе объекта с возможностью вращения вокруг продольной оси объекта, двигатель поворота вилки установлен в корпусе объекта и механически связан с вилкой, основное зеркало состоит из двух частей, имеющих форму части боковой поверхности усеченного конуса и расположенных симметрично относительно оси оптической системы, контррефлектор состоит из двух частей, имеющих форму части боковой поверхности усеченного конуса и расположенных симметрично относительно оси оптической системы, выход приемника лучистой энергии электрически соединен с входом электронного тракта, первый и второй выходы приемника через нормально-замкнутые контакты реле переключения электрически соединены соответственно с первым и вторым входами усилителя мощности и с первым и вторым входами блока формирования управляющего сигнала, третий выход приемника электрически соединен с первым входом блока анализа, первый и второй выходы электронного тракта через нормально-разомкнутые контакты реле переключения электрически соединены соответственно с первым и вторым входами усилителя мощности и с первым и вторым входами блока формирования управляющего сигнала, третий выход электронного тракта электрически соединен с вторым входом блока анализа, выход блока анализа электрически соединен с входом реле переключения, выход измерителя угла поворота внешней рамы электрически соединен с входом блока включения двигателя, а выход блока включения двигателя электрически соединен с входом двигателя поворота вилки.
Техническая сущность изобретения заключается в том, что на больших дальностях по цели, когда возможен прием сигналов от цели только по радиотехническому каналу, блок анализа подключает вход усилителя мощности и вход блока формирования управляющего сигнала к выходу приемника сигнала от цели по радиотехническому каналу. При уменьшении дальности до цели, когда координатор начинает принимать сигнал от цели по оптическому каналу, блок анализа подключает вход усилителя мощности и вход блока формирования управляющего сигнала к выходу приемника сигнала от цели по оптическому каналу, отключая эти выходы от выхода приемника сигнала от цели по радиотехническому каналу. Сигнал от цели по оптическому каналу значительно меньше искажен случайными флуктуациями, чем отраженный от цели радиотехнический сигнал. Поэтому следящий координатор цели в сравнении с прототипом обеспечивает значительно более высокую точность измерения угловой скорости вектора дальности до цели при той же большой дальности действия.
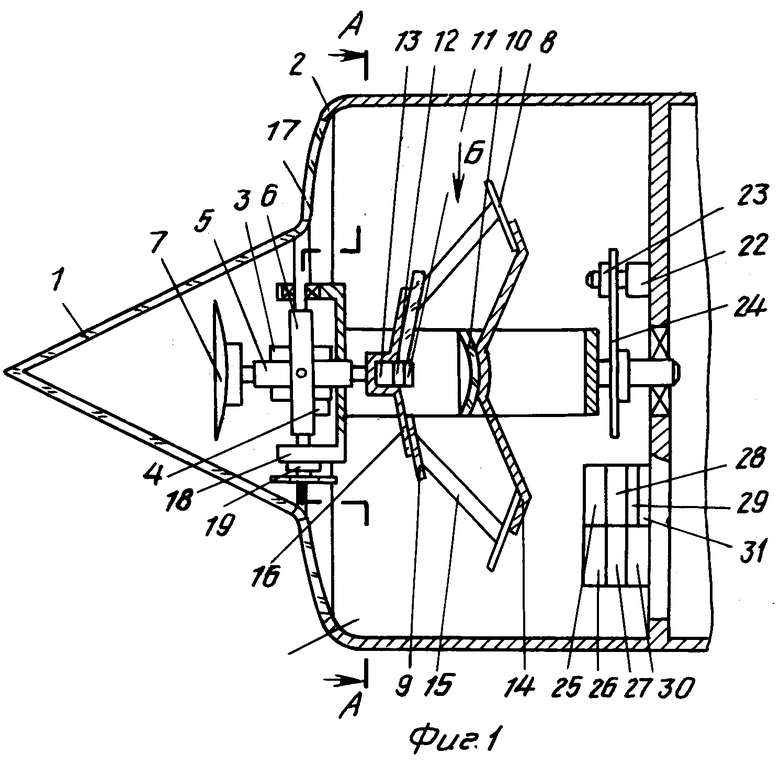
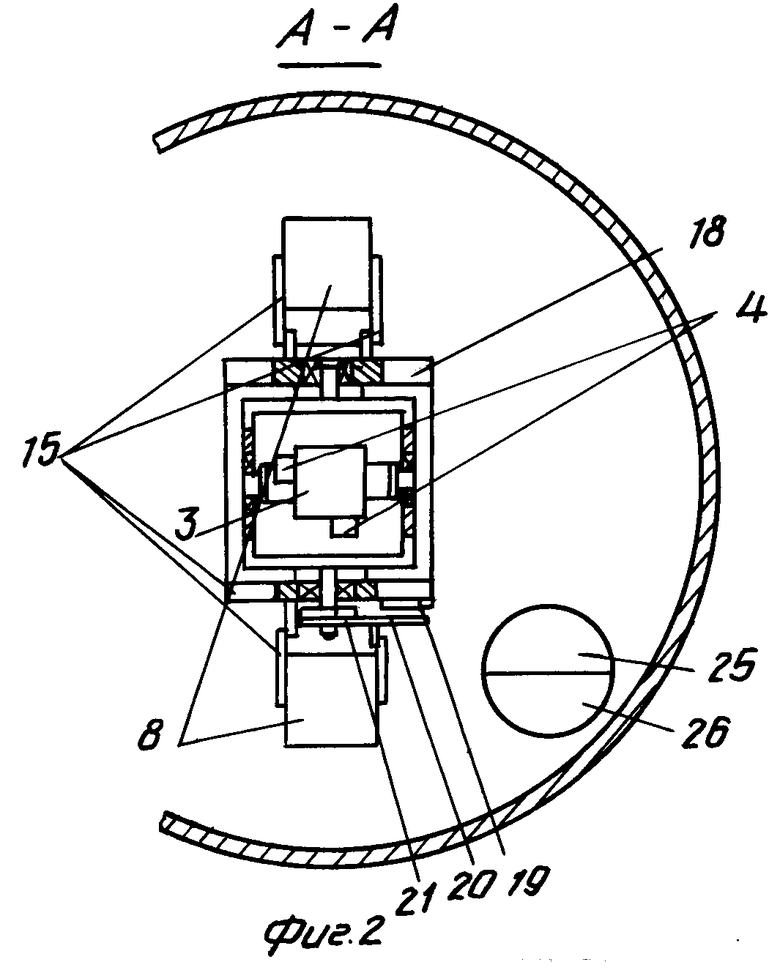
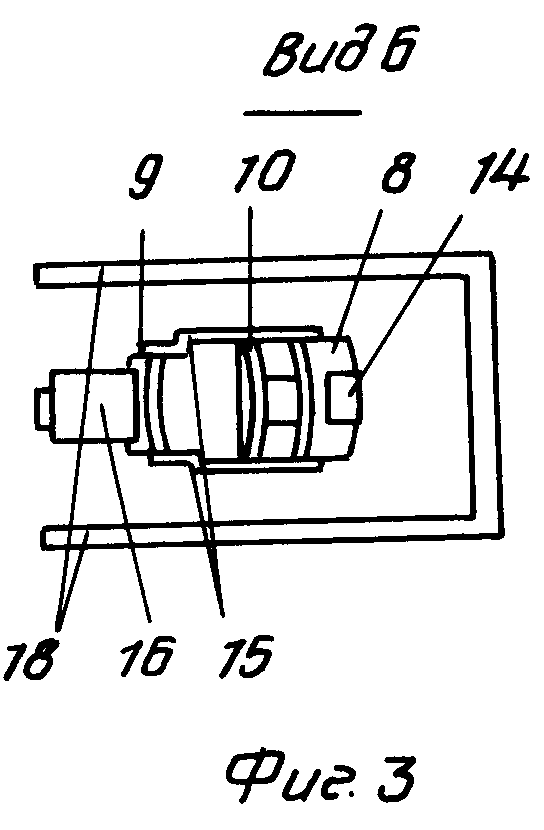
На фиг.1 изображена конструктивная схема следящего координатора; на фиг. 2 разрез А-А на фиг.1; на фиг.3 вид по стрелке Б на фиг.1; на фиг.4 электрическая принципиальная схема координатора; на фиг.5 электрическая принципиальная схема системы поворота вилки координатора.
Радиопрозрачный обтекатель 1 конической формы, выполненный из радиопрозрачного материала, установлен в начале носовой части корпуса 2 объекта. Внутри корпуса 2 объекта находятся гиростабилизированная платформа 3 с моментными датчиками 4, внутренняя рама 5 и внешняя рама 6, причем гиростабилизированная платформа 3 установлена во внутренней раме 5, а внутренняя рама 5 установлена во внешней раме 6 с возможностью вращения внутренней рамы 5 относительно внешней рамы 6 вокруг оси, перпендикулярной продольной оси корпуса 2 объекта. На внутренней раме 5, на той ее части, которая обращена к носовой части обтекателя 1, закреплено антенное устройство 7, причем ось мгновенного поля зрения антенного устройства 7 совпадает с продольной осью гиростабилизированной платформы 3. На противоположной части внутренней рамы 5 установлены основное зеркало 8, контрpефлектор 9 и рефлектор 10, составляющие оптическую систему координатора, оптический фильтр 11, модулирующий растр 12 и приемник лучистой энергии 13.
Чтобы исключить возможность затенения части поля зрения оптической системы элементами ее конструкции, а также для снижения массы оптической системы, основное зеркало 8 выполнено из двух частей, каждая из которых имеет форму части боковой поверхности усеченного конуса, причем эти части основного зеркала 8 установлены симметрично относительно оси оптической системы. Контррефлектор 9 также выполнен из двух частей, каждая из которых имеет форму части боковой поверхности усеченного конуса, причем эти части контррефлектора 9 установлены симметрично относительно оси оптической системы. Рефлектор 10 имеет форму части сферической поверхности. Обе части основного зеркала 8 с помощью кронштейна 14 скреплены между собой и с рефлектором 10. Каждая часть основного зеркала 8 с помощью пластин 15 скреплена с соответствующей частью контррефлектора 9. Обе части контррефлектора 9 с помощью фланца 16 скреплены между собой. Фланец 16 скреплен также с оптическим фильтром 11, модулирующим растром 12, приемником лучистой энергии 13 и внутренней рамой 5. Хвостовая часть обтекателя 1 скреплена с оптически прозрачным защитным устройством 17, имеющим форму части боковой поверхности тора и выполненным из оптически прозрачного материала. Хвостовая часть защитного устройства 17 скреплена с корпусом 2 объекта.
Внешняя рама 6 установлена в вилке 18 с возможностью вращения внешней рамы 6 относительно вилки 18 вокруг оси, перпендикулярной оси вращения внутренней рамы 5 и продольной оси корпуса 2 объекта. На вилке 18 закреплен потенциометр 19, движок которого механически связан с внешней рамой 6 с помощью шестерни 20, закрепленной на валу движка потенциометра 19, и зубчатого сектора 21, закрепленного на оси внешней рамы 6 и находящегося в зацеплении с шестерней 20. Вилка 18 установлена в корпусе 2 объекта по продольной оси корпуса 2 объекта с возможностью вращения вилки 18 относительно корпуса 2 вокруг этой оси. В корпусе 2 объекта закреплен двигатель 22 поворота вилки, который механически связан с вилкой 18 с помощью шестерни 23, закрепленной на выходном валу двигателя 22, и шестерни 24, закрепленной на оси вилки 18 и находящейся в зацеплении с шестерней 23.
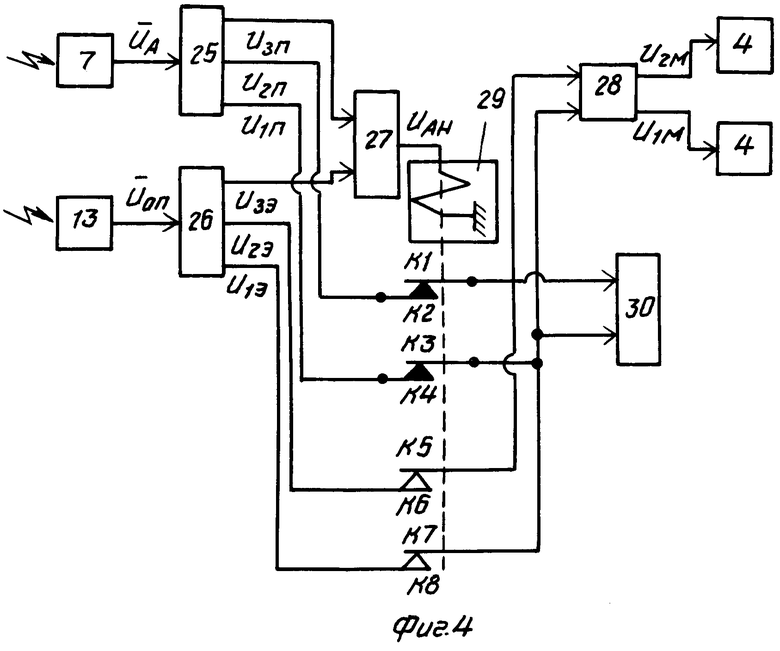
В корпусе 2 объекта установлены приемник 25, электронный тракт 26, блок анализа 27, усилитель мощности 28, реле переключения 29, входной блок 30 формирования управляющего сигнала и блок включения двигателя 31. Вход приемника 25 электрически соединен с выходом антенного устройства 7. Вход электронного тракта 26 электрически соединен с выходом приемника лучистой энергии 13. Первый вход блока анализа 27 электрически соединен с третьим выходом приемника 25, а второй вход блока анализа 27 электрически соединен с третьим выходом электронного тракта 26. Выход блока анализа 27 электрически соединен с обмоткой реле переключения 29. Первый вход усилителя мощности 28 и первый вход входного блока 30 через нормально-замкнутые контакты КЗ-К4 реле переключения 29 электрически соединены с первым выходом приемника 25, а через нормально-разомкнутые контакты К7-К8 реле 29 первый вход усилителя мощности 28 и первый вход входного блока 30 электрически соединены с первым выходом электронного тракта 26. Второй вход усилителя мощности 28 и второй вход входного блока 30 через нормально-замкнутые контакты К1-К2 реле 29 электрически соединены с вторым выходом приемника 25, через нормально-разомкнутые контакты К5-К6 реле 29 второй вход усилителя мощности 28 и второй вход входного блока 30 электрически соединены с вторым выходом приемника 25, а через нормально-разомкнутые контакты К5-К6 реле 29 второй вход усилителя мощности 28 и второй вход входного блока 30 электрически соединены с вторым выходом электронного тракта 26. Вход блока включения двигателя 31 электрически соединен с выходом потенциометра 19, а выход блока 31 электрически соединен с входом двигателя 22. Первый выход усилителя мощности 28 электрически соединен с одним моментным датчиком 4, а второй выход усилителя мощности 28 электрически соединен с другим моментным датчиком 4.
Следящий координатор цели работает следующим образом.
Если дальность D объекта до цели больше дальности D1 захвата сигнала от цели радиотехническим каналом координатора, то на всех трех выходах приемника 25 действуют нулевые электрические сигналы, т.е. U1п= 0; U2п 0; U3п 0 при D > D1. (1)
Точно так же, если D больше дальностью D2 захвата сигнала от цели оптическим каналом координатора, то на всех трех выходах электронного тракта 26 действуют нулевые электрические сигналы, т.е. U1Э 0; U2Э 0; U3Э 0 при D > D2 (2)
Обычно имеет место соотношение
D2 < D1
При D ≅ D1 (3) и приеме антенным устройством 7 сигнала от цели, признаком чего является соотношение  ≠ 0, (4)
≠ 0, (4)
на третьем выходе приемника 25 действует электрический сигнал
U3п ≠ 0, (5) а на первом и втором выходах приемника 25 действуют электрические сигналы, пропорциональные проекциям Δν и Δε на соответствующие плоскости разности орта  вектора
вектора  дальности объекта по цели и орта
дальности объекта по цели и орта  оси мгновенного поля зрения координатора, т.е.
оси мгновенного поля зрения координатора, т.е.
U1п Kpп (Δν + Xp), (6)
U2п Kpk (Δε + Xp), (7) где Kрк коэффициент усиления радиотехнического канала координатора;
Δν проекция разности ортов  и
и  на плоскость, проходящую через орт
на плоскость, проходящую через орт  перпендикулярно плоскости внешней рамы 6;
перпендикулярно плоскости внешней рамы 6;
Δε- проекция разности ортов  и
и  на плоскость, проходящую через орт
на плоскость, проходящую через орт  перпендикулярно плоскости внутренней рамы 5;
перпендикулярно плоскости внутренней рамы 5;
Хр случайная функция, обусловленная случайными флуктуациями радиосигнала от цели, принятого антенным устройством 7.
Следящий координатор цели имеет мгновенное поле зрения антенного устройства 7, характеризуемое ортом  его оси, и мгновенное поле зрения оптической системы, образованной основным зеркалом 8, контррефлектором 9 и рефлектором 10, которое характеризуется ортом
его оси, и мгновенное поле зрения оптической системы, образованной основным зеркалом 8, контррефлектором 9 и рефлектором 10, которое характеризуется ортом  его оси. Однако, так как антенное устройство 7 и оптическая система установлены на внутренней раме 5, то путем соответствующей регулировки можно обеспечить
его оси. Однако, так как антенное устройство 7 и оптическая система установлены на внутренней раме 5, то путем соответствующей регулировки можно обеспечить =
= =
= (8) при
(8) при
D≅D2 (9) и приеме оптической системой сигнала от цели, признаком чего является соотношение 0 (10) на третьем выходе электронного тракта 26 действует электрический сигнал
0 (10) на третьем выходе электронного тракта 26 действует электрический сигнал
U3п ≠ 0, (11) а на первом и втором выходах электронного тракта 26 действуют электрические сигналы
U1Э Kok (Δν + Xo) (12)
U2Э Kok (Δε + Xo) (13) где Kok- коэффициент усиления оптического канала координатора;
Хo случайная функция, обусловленная случайными флуктуациями оптического сигнала от цели, принятого оптической системой и приемником лучистой энергии 13.
Блок анализа 27 реализует следующую зависимость электрического сигнала UАН на его выходе от электрических сигналов U3п и U3э на входах этого блока Uдн 0 при Uзп 0 и U3Э 0 (14) Uдн O при Uзп ≠ 0 и U3Э 0 (15) Uдн const U1≠ 0 при Uoп 0 и U3Э 0 (16) Uдн const U1 ≠ 0 при Uзп≠0 и U3э≠0, (17) причем значение U1 задается таким, чтобы оно было достаточным для срабатывания реле переключения 29.
Блок включения двигателя 31 реализует следующую зависимость электрического сигнала U31 на его выходе от электрического сигнала U1э на входе этого блока
U31 0 приU19| < Uп (18)
U31 U1п sing (U19) приU19| ≥ Uп (19) где Uп заданное пороговое значение, определяемое предельно допустимым значением ϕп угла отклонения внешней рамы 6 от ее среднего положения в вилке 18;
Uм ≠ 0 значение электрического сигнала, необходимое для включения в работу двигателя 22,
U19 текущее значение электрического сигнала на выходе потенциометра 19, пропорциональное углу ϕ отклонения внешней рамы 6 от ее среднего положения в вилке 18
U19 K19 ˙ϕ, (20)
K19 коэффициент усиления потенциометра 19.
Значение угла ϕn задается из условия, чтобы при
ϕ| ≅ ϕп, конструктивные элементы 8, 9, 10, 15, 16 оптической системы не приходили в соприкосновение с вилкой 18.
Усилитель мощности 28 реализует пропорциональную зависимость электрических сигналов U1M и U2M на его выходах от электрических сигналов на соответствующих входах усилителя мощности 28.
Пусть в исходном состоянии (D >D1), D> D2,  =
= ,U19|< Uп (21) Тогда выполняются соотношения (1), (2), (14), реле 29 не срабатывает, первый вход усилителя мощности 28 и первый вход входного блока 30 через нормально-замкнутые контакты К3-К4 реле 29 подключены к первому выходу приемника 25, а второй вход усилителя мощности 28 и второй вход входного блока 30 через нормальнозамкнутые контакты К1-К2 реле 29 подключены к второму выходу приемника 25. Так как U1п 0 и U2п 0, то U1М 0 и U2М= 0, моментные датчики 4 создают нулевые моменты и гиростабилизированная платформа 3 не прецессирует. Кроме того, в этом режиме (21) работы координатора выполняется условие (18), двигатель 22 не включается в работу и вилка 18 неподвижна.
,U19|< Uп (21) Тогда выполняются соотношения (1), (2), (14), реле 29 не срабатывает, первый вход усилителя мощности 28 и первый вход входного блока 30 через нормально-замкнутые контакты К3-К4 реле 29 подключены к первому выходу приемника 25, а второй вход усилителя мощности 28 и второй вход входного блока 30 через нормальнозамкнутые контакты К1-К2 реле 29 подключены к второму выходу приемника 25. Так как U1п 0 и U2п 0, то U1М 0 и U2М= 0, моментные датчики 4 создают нулевые моменты и гиростабилизированная платформа 3 не прецессирует. Кроме того, в этом режиме (21) работы координатора выполняется условие (18), двигатель 22 не включается в работу и вилка 18 неподвижна.
Следующий режим работы координатора наступает тогда, когда в процессе сближения объекта с целью дальность объекта до цели становится меньше D1, но больше D2, т.е.
D2 < D < D1 (22) В этом случае выполняются условия (3), (4) (5), (15), реле 29 также не срабатывает и на соответствующих входах усилителя мощности 28 и входного блок 30 действуют сигналы, определяемые выражениями (6) и (7). На выходах усилителя мощности 28 действуют электрические сигналы U1M и U2М, пропорциональные соответственно сигналам U1п(6) и U2п(7). Моментные датчики 4 создают моменты, пропорциональные сигналам U1м и U2м. Под действием этих моментов гиростабилизированная платформа 3 начинает прецессировать вокруг оси вращения внутренней рамы 5 и вокруг оси вращения внешней рамы 6 в сторону уменьшения рассогласования Δ Y и Δε. Значения угловых скоростей прецессии гиростабилизированной платформы 3 вокруг указанных осей пропорциональны моментам, создаваемым моментными датчиками 4, а эти моменты пропорциональны электрическим сигналам U1п(6) и U2п(7). Если рассогласования Δ Y и Δε невелики и уменьшаются в ходе прецессии гиростабилизированной платформы, то значения электрических сигналов U1п(6) и U2п(7) можно рассматривать как измерения угловой скорости вращения вектора  дальности объекта до цели в соответствующих плоскостях, причем точность этих измерений определяется случайной функцией Xр. Если в процессе прецессии гиростабилизированной платформы вокруг оси вращения наружной рамы 6 начинает выполняться соотношение
дальности объекта до цели в соответствующих плоскостях, причем точность этих измерений определяется случайной функцией Xр. Если в процессе прецессии гиростабилизированной платформы вокруг оси вращения наружной рамы 6 начинает выполняться соотношение
ϕ| ≅ ϕn, (23) то выполняется условие (19) и двигатель 22 включается в работу, поворачивая вилку 18. При повороте вилки 18 изменяются углы ориентации в пространстве орта  , а следовательно, и углы рассогласования Δ Y и Δε между ортами
, а следовательно, и углы рассогласования Δ Y и Δε между ортами  и
и  . Двигатель 22 поворачивает вилку 18 в том направлении, при котором рассогласование Δ Y, появляющееся в результате поворота гиростабилизированной платформы 3 вместе с вилкой 18, вызывает прецессию гиростабилизированной платформы 3 вокруг оси вращения наружной рамы 6 в строну уменьшения угла ϕ отклонения наружной рамы 6 от ее среднего положения в вилке 18.
. Двигатель 22 поворачивает вилку 18 в том направлении, при котором рассогласование Δ Y, появляющееся в результате поворота гиростабилизированной платформы 3 вместе с вилкой 18, вызывает прецессию гиростабилизированной платформы 3 вокруг оси вращения наружной рамы 6 в строну уменьшения угла ϕ отклонения наружной рамы 6 от ее среднего положения в вилке 18.
Третий режим работы координатора наступает тогда, когда в процессе сближения объекта с целью дальность объекта до цели становится меньше D2. В этом случае выполняются условия (9), (10), (11), (17) и реле переключения 29 срабатывает. В результате размыкаются нормально-замкнутые контакты К1-К2 и К3-К4 и отключают входы усилителя мощности 28 и входного блока 30 от соответствующих выходов приемника 25, а замкнувшиеся нормально-разомкнутые контакты К5-К6 и К7-К8 подключают входы усилителя мощности 28 и входного блока 30 к соответствующим выходам электронного тракта 26. Поэтому на входах усилителя мощности 28 и входного блока 30 будут действовать электрические сигналы U1э и U2э, определяемые выражениями (12) и (13), а в остальном координатор будет работать так же, как в предыдущем режиме.
Так как между случайными функциями Хр и Хo, фигурирующими в выражениям (6), (7) и (12), (13) существует соотношение
Хo < Хр, то точность измерения угловой скорости вращения вектора дальности объекта до цели, определяемая электрическими сигналами U1п, U2п и U1э, U2э, в третьем режиме работы координатора будет существенно выше.
Наличие в следящем координаторе цели радиотехнического канала приема излучения от цели обеспечивает его большую дальность действия. Наличие оптического канала приема излучения от цели обеспечивает высокую точность измерения угловой скорости вращения вектора дальности объекта до цели при организации слежения за целью с использованием информации от цели, получаемой по этому каналу. Кроме того, если по одному из каналов координатора, радиотехническому или оптическому, вследствие каких-либо причин, в том числе и в результате радиоэлектронного противодействия, прекратится прием сигнала от цели, то координатор будет продолжать слежение за целью по другому каналу, что характеризует его более высокую помехоустойчивость в сравнении с устройством-прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ОБЛАСТИ ВОЗМОЖНОГО ПУСКА РАКЕТЫ | 2001 |
|
RU2206044C2 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ | 1995 |
|
RU2097927C1 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270523C1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1993 |
|
RU2072311C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯ ЗРЕНИЯ СИСТЕМЫ ОБЗОРА | 2000 |
|
RU2183023C2 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 2011 |
|
RU2476826C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
Использование: системы наведения управляемых объектов. Сущность изобретения: следящий координатор цели обеспечивает повышение точности измерения угловой скорости вращения вектора дальности объекта до цели и одновременно увеличивает дальность действия радиотехнического и оптического каналов получения сигнала от цели, причем чувствительные к сигналам от цели элементы этих каналов установлены на внутренней раме гиростабилизированной платформы. Блоки анализа обеспечивают подключение выходов указанных каналов на вход усилителя мощности, выходы которого соединены с моментными датчиками гиростабилизированной платформы, внешняя рама которой установлена в вилке, установленной в корпусе объекта с возможностью вращения вокруг продольной оси объекта. 5 ил.
СЛЕДЯЩИЙ КООРДИНАТОР ЦЕЛИ, содержащий радиопрозрачный обтекатель, антенное устройство, приемник, гиростабилизированную платформу с моментными датчиками, внутреннюю раму, внешнюю раму и усилитель мощности, причем радиопрозрачный обтекатель установлен в начале носовой части корпуса объекта, антенное устройство установлено на внутренней раме со стороны радиопрозрачного обтекателя, гиростабилизированная платформа установлена на внутренней раме, внутренняя рама установлена во внешней раме с возможностью вращения относительно внешней рамы вокруг оси, перпендикулярной продольной оси корпуса объекта, выход антенного устройства электрически соединен с входом приемника, первый выход усилителя мощности электрически соединен с одним моментным датчиком, а второй выход усилителя мощности электрически соединен с другим моментным датчиком, отличающийся тем, что координатор дополнительно содержит оптически прозрачное защитное устройство, оптическую систему, состоящую из основного зеркала, контррефлектора и рефлектора, оптический фильтр, модулирующий растр, приемник лучистой энергии, электронный тракт, вилку, двигатель поворота вилки, измеритель угла поворота внешней рамы, блок анализа, реле переключения и блок включения двигателя поворота вилки, причем оптически прозрачное защитное устройство установлено в корпусе объекта за радиопрозрачным обтекателем, оптическая система, оптический фильтр, модулирующий растр и приемник лучистой энергии установлены на внутренней раме противоположно месту установки антенной системы, внешняя рама установлена в вилке с возможностью вращения относительно вилки вокруг оси, перпендикулярной продольной оси объекта, и оси вращения внутренней рамы, вилка установлена в корпусе объекта с возможностью вращения вокруг продольной оси объекта, двигатель поворота вилки установлен в корпусе объекта и механически связан с вилкой, основное зеркало состоит из двух частей, имеющих форму части боковой поверхности усеченного конуса и расположенных симметрично относительно оси оптической системы, контррефлектор состоит из двух частей, имеющих форму части боковой поверхности усеченного конуса и расположенных симметрично относительно оси оптической системы, выход приемника лучистой энергии электрически соединен с входом электронного тракта, первый и второй выходы приемника через нормально замкнутые контакты реле переключения электрически соединены соответственно с первым и вторым входами блока формирования управляющего сигнала, третий выход приемника электрически соединен с первым входом блока анализа, первый и второй выходы электронного тракта через нормально разомкнутые контакты реле переключения электрически соединены соответственно с первым и вторым входами усилителя мощности и с первым и вторым входами блока формирования управляющего сигнала, третий выход электронного тракта электрически соединен с вторым входом блока анализа, выход блока анализа электрически соединен с входом реле переключения, выход измерителя угла поворота внешней рамы электрически соединен с входом блока включения двигателя, а выход блока включения двигателя электрически соединен с входом двигателя поворота вилки.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Максимов М.В | |||
| и Горгонов Г.И | |||
| Радиоэлектронные системы самонаведения | |||
| М.: Радио и связь, 1982, с.218-229. | |||
