Изобретение относится к радиолокации.
Известна импульсно-доплеровская радиолокационная станция (РЛС), содержащая последовательно соединенные приемопередающую антенну, антенный переключатель (АП), первый смеситель, предварительный усилитель промежуточной частоты и блок селекции, в котором формируется радиолокационное изображение, состоящий из N каналов селекции, где N - количество элементов разрешения РЛС по дальности, причем каждый из N каналов селекции состоит из последовательно соединенных селектора дальности, блока частотной селекции и блока цифровой обработки, выход которого является выходом из N выходов блока селекции, соединенных с соответствующими N входами первой группы входов индикатора, первые входы всех N селекторов дальности объединены и являются первым входом блока селекции, усилитель мощности, второй смеситель, генератор высокой частоты, кварцевый гетеродин, модулятор и синхронизатор, причем первый выход синхронизатора через модулятор соединен с первым входом усилителя мощности, второй вход которого соединен с выходом генератора высокой частоты (ГВЧ), а выход - с вторым входом антенного переключателя, второй выход синхронизатора соединен с вторыми входами всех N селекторов дальности и является вторым входом блока селекции, выход кварцевого гетеродина соединен с первым входом второго смесителя, второй вход которого соединен с выходом ГВЧ, а выход - с вторым входом первого смесителя, вторые входы всех N селекторов дальности объединены и являются вторым входом блока селекции, а также блок привязки координат, блок формирования эталонов, блок вычисления вероятностей и решающий блок, причем первые группы входов блока привязки координат и блока вычисления вероятностей объединены и каждый вход этих групп входов соединен с соответствующим выходом блока селекции, второй вход блока привязки координат соединен с третьим выходом синхронизатора, первая группа выходов - с второй группой входов блока вычисления вероятностей, а второй, третий и четвертый входы - соответственно с третьим, четвертым и пятым входами блока формирования эталонов, первый и второй входы которого соединены соответственно с вторым и третьим входами антенны, а L•M спаренных групп выходов - с L•M спаренными группами входов блока вычисления вероятностей, где L - количество фиксированных ракурсов цели с общей их суммой 360o, а M - количество эталонов возможных боевых порядков воздушной цели, третий вход блока вычисления вероятностей соединен с четвертым выходом синхронизатора, а группа его выходов - с первой группой входов решающего блока, второй вход которого соединен с четвертым выходом синхронизатора, группа выходов решающего блока соединена с второй группой входов индикатора.
Недостатком данной РЛС является малая информативность радиолокационного наблюдения вследствие отсутствия возможности распознавания класса воздушной цели.
Повышение информативности радиолокационного наблюдения осуществляется за счет распознавания класса воздушной цели.
Это достигается тем, что в РЛС, содержащую приемопередающее устройство (ППУ), устройство формирования изображения (УФИ) и индикатор, причем ППУ содержит антенну, соединенную с первым АП, первый ГВЧ, дополнительно введено устройство распознавания класса цели (УР), причем приемопередающее устройство содержит первый фазовый детектор (ФД), сигнальный вход которого соединен с выходом первого АП, а выход - с первым сигнальным входом первого коммутатора, четыре выхода которого образуют первую группу сигнальных выходов ППУ, блок синхронизации (БС), второй фазовый детектор, выход которого соединен с вторым сигнальным входом первого коммутатора, второй коммутатор, третий коммутатор, первый и второй сигнальные входы которого соединены с первым и вторым выходами блока автоматической компенсации скорости цели (БАКСЦ), второй ГВЧ, причем выходы первого ГВЧ и второго ГВЧ соединены соответственно с первым и вторым сигнальными входами второго коммутатора и соединены соответственно с первым и вторым опорными входами БАКСЦ, первый фазовращатель (ФВ) и второй ФВ, входы которых соединены соответственно с первым и вторым выходами третьего коммутатора, а объединенные выходы соединены с опорными входами третьего ФД и четвертого ФД, выходы которых соединены соответственно с первым и вторым сигнальными входами четвертого коммутатора, четыре выхода которого образуют вторую группу сигнальных выходов ППУ, вращатель поляризации (ВП), вход которого соединен с вторым входом антенны, а выход - с первым входом второго АП, выход которого соединен с сигнальными входами второго ФД и четвертого ФД и с первым входом БС, при этом устройство формирования изображения содержит канал формирования изображения по квадратуре X, четыре сигнальных входа которого являются первой группой сигнальных входов устройства формирования изображения и соединены с первой группой выходов ППУ, а три опорных выхода являются первой группой опорных выходов устройства формирования изображения и соединены с первой группой сигнальных входов блока автоматической компенсации скорости цели, являющихся первой группой входов ППУ, канал формирования изображения по квадратуре Y, четыре сигнальных входа которого являются второй группой сигнальных входов устройства формирования изображения и соединены с второй группой выходов ППУ, а три опорных выхода являются второй группой опорных выходов устройства формирования изображения (УФИ) и соединены с второй группой сигнальных входов блока автоматической компенсации скорости цели, являющихся второй группой входов ППУ, блок сумматоров (БСМ), первая группа входов которого соединена с девятью сигнальными выходами канала формирования изображения по квадратуре X, вторая группа входов соединена с девятью сигнальными выходами канала формирования изображения по квадратуре Y, а девять выходов соединены с девятью сигнальными входами блока временных селекторов (БВС), две группы выходов которого являются двумя группами выходов УФИ, устройство распознавания класса цели содержит блок распознавания по многочастотному портрету (БР МЧП), три сигнальных входа которого являются первой группой сигнальных входов устройства распознавания класса цели и соединены с первой группой выходов устройства формирования изображения, а N выходов являются первой группой выходов УР, где N - число альтернатив распознавания по МЧП, блок распознавания по поляризационно-спектральному портрету (БР ПСП), шесть сигнальных входов которого являются второй группой сигнальных входов устройства распознавания класса цели и соединены с второй группой выходов устройства формирования изображения, а M выходов являются второй группой выходов УР, где M - число альтернатив распознавания по ПСП, блок нормировки по дальности (БН), выход которого соединен с опорными входами блока распознавания по многочастотному портрету и блока распознавания по поляризационно-спектральному портрету, индикатор, M+N входов которого соединены с двумя группами выходов устройства распознавания класса цели, причем первый и второй выходы второго коммутатора соединены соответственно с вторыми входами первого АП и второго АП, выход первого АП соединен с вторым входом БС и с сигнальным входом третьего фазового детектора, первый выход БС соединен с первым синхронизирующим входом второго коммутатора и с первым синхронизирующим входом блока нормировки, второй выход БС соединен с вторым синхронизирующим входом второго коммутатора, с синхронизирующим входом третьего коммутатора, с первыми синхронизирующими входами канала формирования изображения по квадратуре X и канала формирования изображения по квадратуре Y, третий выход БС соединен с первыми синхронизирующими входами первого и четвертого коммутаторов, четвертый выход БС соединен с вторыми синхронизирующими входами канала формирования изображения по квадратуре X и канала формирования изображения по квадратуре Y, пятый выход БС соединен с третьими синхронизирующими входами канала формирования изображения по квадратуре X и канала формирования изображения по квадратуре Y и с первым синхронизирующим входом блока автоматической компенсации скорости цели, шестой выход БС соединен с четвертыми синхронизирующими входами канала формирования изображения по квадратуре X и канала формирования изображения по квадратуре Y и с вторыми синхронизирующими входами первого и четвертого коммутаторов, седьмой выход БС соединен с пятыми синхронизирующими входами канала X и канала Y, с вторым синхронизирующим входом блока автоматической компенсации скорости цели, с синхронизирующим входом БВС, с третьими синхронизирующими входами первого и четвертого коммутаторов и с вторым синхронизирующим входом блока нормировки, третий выход третьего коммутатора соединен с опорными входами первого ФД и второго ФД.
Кроме того, блок автоматической компенсации скорости цели содержит первый блок вычитания, выход которого соединен с первым входом первого умножителя, выход которого соединен с первым входом второго блока вычитания, выход которого соединен с сигнальным входом детектора огибающей (ДО), выход которого через интегратор соединен с входами первого и второго управляемых генераторов, третий блок вычитания, выход которого соединен с первым входом второго умножителя, выход которого соединен с вторым входом второго блока вычитания, первый и второй входы первого блока вычитания и второй вход второго умножителя являются первой группой входов ППУ, первый и второй входы третьего блока вычитания и второй вход первого умножителя являются второй группой входов ППУ, первый и второй смесители, сигнальные входы которых являются соответственно первым и вторым опорными входами блока автоматической компенсации скорости цели, а выходы соединены соответственно через первый и второй фильтры с сигнальными входами третьего и четвертого смесителей, выходы которых соединены соответственно с входами третьего и четвертого фильтров, выходы которых являются соответственно первым и вторым выходами блока автоматической компенсации скорости цели, выход первого управляемого генератора соединен с опорными входами первого и второго смесителей, выход второго управляемого генератора соединен с опорными входами третьего и четвертого смесителей, первый и второй синхронизирующие входы детектора огибающей являются соответственно первым и вторым синхронизирующими входами блока автоматической компенсации скорости цели.
Кроме того, УФИ содержит канал формирования изображения по квадратуре X, канал формирования изображения по квадратуре Y, блок сумматоров, блок временных селекторов, причем канал формирования изображения по квадратуре X содержит первый детектор огибающей (ДО), выход которого через первый фильтр низких частот (ФНЧ) и первый квадратор образует первый выход канала формирования изображения по квадратуре X, а через первый фильтр высоких частот (ФВЧ) и второй квадратор образует второй выход канала формирования изображения по квадратуре X, второй детектор огибающей, выход которого соединен с сигнальным входом коммутатора, первый и второй выходы которого соединены соответственно через второй и третий ФНЧ с входами соответственно третьего и четвертого квадраторов и соответственно с входами умножителя, выходы третьего и четвертого квадраторов соединены с входами первого сумматора, выход которого является третьим выходом канала формирования изображения по квадратуре X, выход первого умножителя является четвертым выходом канала формирования изображения по квадратуре X, выходы четвертого и третьего квадраторов являются соответственно пятым и шестым выходами канала формирования изображения по квадратуре X, выход второго ДО через второй ФВЧ и пятый квадратор образует седьмой выход канала формирования изображения по квадратуре X, третий детектор огибающей, выход которого соединен с сигнальным входом первого временного селектора (ВС), выход которого соединен с первым входом второго сумматора, выход которого соединен с сигнальным входом четвертого детектора огибающей, выход которого через четвертый ФНЧ и шестой квадратор образует восьмой выход канала формирования изображения по квадратуре X, а через третий ФВЧ и седьмой квадратор образует девятый выход канала формирования изображения по квадратуре X, синхронизирующий вход коммутатора является первым синхронизирующим входом канала формирования изображения по квадратуре X, первые синхронизирующие входы второго и третьего детекторов огибающей являются вторым синхронизирующим входом канала формирования изображения по квадратуре X, первые синхронизирующие входы первого и четвертого детекторов огибающей являются третьим синхронизирующим входом канала формирования изображения по квадратуре X, вторые синхронизирующие входы второго и третьего детекторов огибающей являются четвертым синхронизирующим входом канала формирования изображения по квадратуре X, вторые синхронизирующие входы первого и четвертого детекторов огибающей и синхронизирующий вход первого временного селектора являются пятым синхронизирующим входом канала X, сигнальные входы первого, второго, третьего детекторов огибающей и второй вход второго сумматора являются сигнальными входами канала формирования изображения по квадратуре X и первой группой сигнальных входов УФИ, первый, второй вход и выход второго сумматора являются опорными выходами канала формирования изображения по квадратуре X и первой группой опорных выходов устройства формирования изображения, канал формирования изображения по квадратуре Y идентичен каналу формирования изображения по квадратуре X, причем сигнальные входы канала формирования изображения по квадратуре Y являются второй группой сигнальных входов устройства формирования изображения, а опорные выходы канала формирования изображения по квадратуре Y являются второй группой опорных выходов УФИ, блок сумматоров содержит третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый и одиннадцатый сумматоры, первые входы которых являются первой группой входов БСМ и соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым, девятым выходами канала формирования изображения по квадратуре X, вторые входы являются второй группой входов блока сумматоров и соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, восьмым, девятым выходами канала формирования изображения по квадратуре Y, а выходы являются соответственно первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым и девятым выходами блока сумматоров, блок временных селекторов содержит второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый и десятый временные селекторы, сигнальные входы которых являются соответственно первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым и девятым входами БВС и соединены соответственно с первым, вторым, третьим, седьмым, восьмым, девятым, четвертым, пятым и шестым выходами БСМ, синхронизирующие входы являются синхронизирующим входом блока временных селекторов, выходы восьмого, девятого и десятого временных селекторов образуют первую группу выходов блока временных селекторов и первую группу выходов устройства формирования изображения, выходы второго, третьего, четвертого, пятого, шестого и седьмого временных селекторов образуют вторую группу выходов БВС и вторую группу выходов устройства формирования изображения.
Кроме того, блок распознования по многочастотному портрету содержит обнаружитель максимального сигнала (ОМС) и N каналов обработки, где N - число альтернатив распознавания по МЧП, каждый j-й из которых содержит первый, второй и третий умножители, первые входы которых являются сигнальными входами БР МЧП, а выходы соединены с входами первого сумматора, выход которого соединен с первым входом первого вычитающего устройства, выход которого является выходом j-го канала обработки, формирователь весовых коэффициентов и смещения многочастотного портрета (ФВКС СЧП) содержит источник эталонных напряжений многочастотного портрета (ИЭН МЧП), первый выход которого соединен с первым входом четвертого умножителя, выход которого соединен через первый умножитель на 2 с первым входом второго сумматора, через первый квадратор соединен с первым входом пятого умножителя, выход которого соединен с вторым входом второго сумматора и с первым входом третьего сумматора, выход второго сумматора соединен с входом логарифмического усилителя (ЛУ), через второй умножитель на 2 соединен с первым входом первого делителя и соединен с первым входом второго делителя, выход четвертого умножителя соединен с первым входом шестого умножителя и с вторым входом третьего сумматора, выход которого соединен с вторым входом первого делителя, второй выход ИЭН МЧП соединен с первым входом второго вычитающего устройства и с третьим входом второго сумматора, третий выход ИЭН МЧП через второй квадратор соединен с вторым входом второго вычитающего устройства и соединен с вторым входом шестого умножителя, выход которого соединен с вторым входом второго делителя, выход второго вычитающего устройства соединен с вторым входом пятого умножителя, второй вход четвертого умножителя является опорным входом БР МЧП, выход логарифмического усилителя является первым выходом ФВКС МЧП и соединен с вторым входом первого вычитающего устройства, выход первого делителя является вторым выходом ФВКС МЧП и соединен с вторыми входами первого и третьего умножителей, выход второго делителя является третьим выходом ФВКС МЧП и соединен с вторым входом второго умножителя, N входов определителя максимального сигнала соединены с выходами N каналов обработки, а N выходов определителя максимального сигнала являются выходами блока распознавания по многочастотному портрету.
Кроме того, блок распознавания по поляризационно-спектральному портрету содержит ОМС и M каналов обработки, где M - число альтернатив распознавания по ПСП, каждый i-й из которых содержит блок модуляционной составляющей, три сигнальных входа которого являются модуляционными сигнальными входами БР ПСП, а выход соединен с первым входом первого сумматора, выход которого является выходом i-го канала обработки, блок планерной составляющей, три сигнальных входа которого являются планерными сигнальными входами блока распознавания по поляризационно-спектральному портрету, а выход соединен с вторым входом первого сумматора, при этом блок планерной составляющей содержит первый, второй и третий умножители, первые входы которых являются сигнальными входами блока планерной составляющей, а выходы соединены с входами второго сумматора, выход которого соединен с первым входом вычитающего устройства, выход которого является выходом блока планерной составляющей, формирователь весовых коэффициентов и смещения поляризационно-спектрального портрета (ФВКС ПСП), который содержит источник эталонных напряжений поляризационно-спектрального портрета (ИЭН ПСП), первый выход которого соединен с первыми входами третьего, четвертого и пятого сумматоров, второй выход соединен с первыми входами четвертого умножителя и первого делителя, третий выход соединен с первыми входами пятого умножителя и второго делителя, четвертый выход соединен с первыми входами шестого умножителя и третьего делителя, вторые входы четвертого, пятого и шестого умножителей являются опорным входом блока распознавания по поляризационно-спектральному портрету, а выходы соединены с вторыми входами соответственно третьего, четвертого и пятого сумматоров, выходы которых соединены с входами седьмого умножителя и через первый, второй и третий умножитель на 2 соединены с вторыми входами соответственно первого, второго и третьего делителей, выходы которых являются первым, вторым и третьим выходами ФВКС ПСП и соединены с вторыми входами соответственно первого, второго и третьего умножителей, выход седьмого умножителя через логарифмический усилитель образует четвертый выход ФВКС ПСП и соединен с вторым входом вычитающего устройства, M входов определителя максимального сигнала соединены с выходами M каналов обработки, а M выходов определителя максимального сигнала являются выходами блока распознавания по поляризационно-спектральному портрету.
На фиг. 1 приведена структурная схема РЛС; на фиг. 2 - структурная схема БС; на фиг. 3 эпюры напряжений БС; на фиг. 4 - структурная схема блока автоматической компенсации скорости цели; на фиг. 5 - эпюры напряжений БАКСЦ; на фиг. 6 - структурная схема устройства формирования изображения; на фиг. 7 - эпюры напряжений УФИ; на фиг. 8 - эпюры напряжений УФИ; на фиг. 9 - структурная схема блока распознавания по многочастотному портрету; на фиг. 10 - структурная схема БР ПСП; на фиг. 11 - принципиальная схема индикатора.
РЛС содержит (см. фиг. 1) приемопередающее устройство (ППУ) 1, устройство формирования изображения 2, устройство распознавания класса цели 3 и индикатор 4. ППУ 1 содержит антенну 5, первый вход которой соединен с первым входом первого АП 6, первый фазовый детектор 7, сигнальный вход которого соединен с выходом первого АП 6, а выход - с первым сигнальным входом первого коммутатора 8, четыре выхода которого образуют первую группу сигнальных выходов ППУ 1, блок синхронизации 9, второй фазовый детектор 10, выход которого соединен с вторым сигнальным входом первого коммутатора 8, второй коммутатор 11, третий коммутатор 12, первый и второй сигнальные входы которого соединены с первым и вторым выходами блока автоматической компенсации скорости цели 13, первый ГВЧ 14 и второй ГВЧ 15, выходы которых соединены соответственно с первым и вторым сигнальными входами второго коммутатора 11 и соответственно с первым и вторым опорными входами БАКСЦ 13, первый фазовращатель (ФВ) 16 и второй ФВ 17, входы которых соединены соответственно с первым и вторым выходами третьего коммутатора 12, а объединенные выходы соединены с опорными входами третьего ФД 18 и четвертого ФД 19, выходы которых соединены соответственно с первым и вторым сигнальными входами четвертого коммутатора 20, четыре выхода которого образуют вторую группу сигнальных выходов ППУ 1, вращатель поляризации (ВП) 21, вход которого соединен с вторым входом антенны 5, а выход соединен с первым входом второго АП 22, выход которого соединен с сигнальными входами второго ФД 10 и четвертого ФД 19 и с первым входом БС 9. Устройство формирования изображения 2 содержит канал формирования изображения по квадратуре X 23, четыре сигнальных входа которого являются первой группой сигнальных входов УФИ 2 и соединены с первой группой выходов ППУ 1, а три опорных выхода являются первой группой опорных выходов УФИ 2 и соединены с первой группой сигнальных входов блока автоматической компенсации скорости цели 13, являющихся первой группой входов ППУ 1, канал формирования изображения по квадратуре Y 24, четыре сигнальных входа которого являются второй группой сигнальных входов УФИ 2 и соединены с второй группой выходов ППУ 1, а три опорных выхода являются второй группой опорных выходов УФИ 2 и соединены с второй группой сигнальных входов блока автоматической компенсации скорости цели 13, являющихся второй группой входов ППУ 1, блок сумматоров (БСМ) 25, первая группа входов которого соединена с девятью сигнальными входами канала формирования изображения по квадратуре X 23, вторая группа входов соединена с девятью сигнальными входами канала формирования изображения по квадратуре Y 24, а девять выходов соединены с девятью сигнальными входами блока временных селекторов (БВС) 26, две группы выходов которого являются двумя группами выходов УФИ 2. Устройство распознавания класса цели 3 содержит блок распознавания по многочастотному портрету (БР МЧП) 27, три сигнальных входа которого являются первой группой сигнальных входов устройства распознавания класса цели 3 и соединены с первой группой выходов УФИ 2, а N выходов являются первой группой выходов УР 3, где N - число альтернатив распознавания по МЧП, блок распознавания по поляризационно-спектральному портрету (БР ПСП) 28, шесть сигнальных входов которого являются второй группой сигнальных входов устройства распознавания класса цели 3 и соединены с второй группой выходов УФИ 2, а M выходов являются второй группой выходов УР 3, где M - число альтернатив распознавания по ПСП, блок нормировки по дальности (БН) 29, выход которого соединен с опорными входами блока распознавания по многочастотному портрету 27 и блока распознавания по поляризационно-спектральному портрету 28. M+N входов индикатора 4 соединены с двумя группами выходов устройства распознавания класса цели 3. Первый и второй выходы второго коммутатора 11 соединены соответственно с вторыми входами первого АП 6 и второго АП 22, выход первого АП 6 соединен с вторым входом БС 9 и с сигнальным входом третьего фазового детектора 18, первый выход БС 9 соединен с первым синхронизирующим входом второго коммутатора 11 и с первым синхронизирующим входом блока нормировки 29, второй выход БС 9 соединен с вторым синхронизирующим входом второго коммутатора 11, с синхронизирующим входом третьего коммутатора 12, с первыми синхронизирующими входами канала формирования изображения по квадратуре X 23 и канала формирования изображения по квадратуре Y 24, третий выход БС 9 соединен с первыми синхронизирующими входами первого 8 и четвертого 20 коммутаторов, четвертый выход БС 9 соединен с вторыми синхронизирующими входами канала формирования изображения по квадратуре X 23 и канала формирования изображения по квадратуре Y 24, пятый выход БС 9 соединен с третьими синхронизирующими входами канала формирования изображения по квадратуре X 23 и канала формирования изображения по квадратуре Y 24 и с первым синхронизирующим входом блока автоматической компенсации скорости цели 13, шестой выход БС 9 соединен с четвертыми синхронизирующими входами канала формирования изображения по квадратуре X 23 и канала формирования изображения по квадратуре Y 24 и с вторыми синхронизирующими входами первого 8 и четвертого коммутаторов 20, седьмой выход БС 9 соединен с пятыми синхронизирующими входами канала формирования изображения по квадратуре X 23 и канала формирования изображения по квадратуре Y 24, с вторым синхронизирующим входом блока автоматической компенсации скорости цели 13, с синхронизирующим входом БВС 26, с третьими синхронизирующими входами первого 8 и четвертого 20 коммутаторов и с вторым синхронизирующим входом блока нормировки 29, третий выход третьего коммутатора 12 соединен с опорными входами первого ФД 7 и второго ФД 10.
Блок синхронизации 9 (см. фиг. 2) содержит генератор импульсов запуска 30, выход которого соединен с синхронизирующим входом измерителя дальности (ИД) 31, входом блока управления коммутацией (БУК) 32 и образует первый выход БС 9, первый амплитудный детектор (АД) 33 и второй АД 34, входы которых соответствуют первому и второму входам БС 9, а выходы соединены с входами сумматора 35, выход которого соединен с сигнальным входом измерителя дальности 31, выход которого соединен с сигнальным входом коммутатора 36, выходы которого образуют четвертый, пятый, шестой, седьмой выходы БС 9, первый и второй выходы БУК 32 образуют соответственно второй и третий выходы БС 9, второй выход БУК 32 соединен с синхронизирующим входом коммутатора 36.
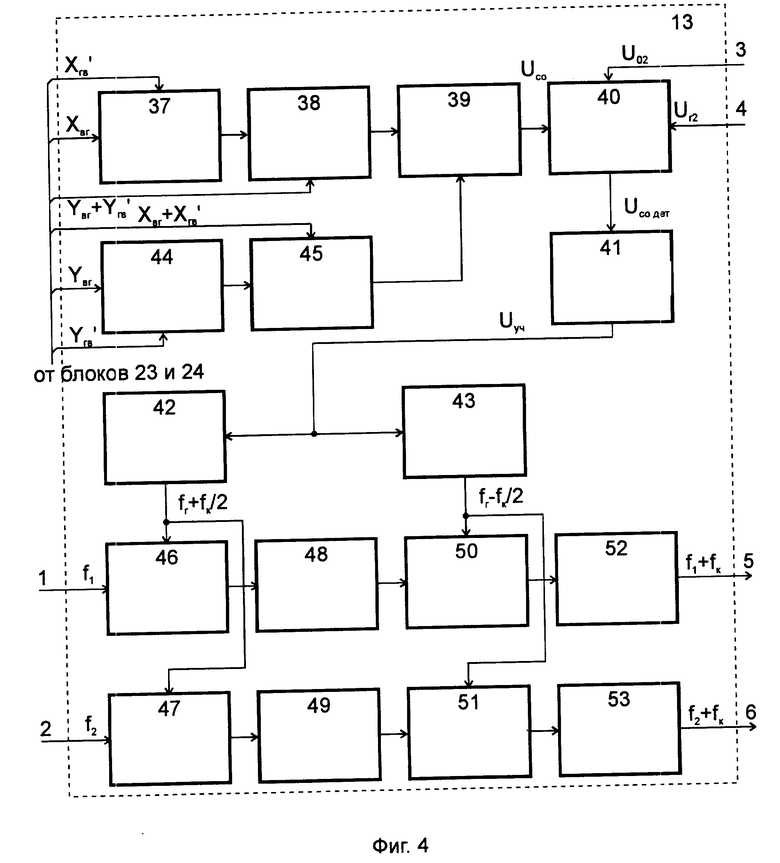
Блок автоматической компенсации скорости цели 13 (см. фиг. 4) содержит первый блок вычитания 37, выход которого соединен с первым входом первого умножителя 38, выход которого соединен с первым входом второго блока вычитания 39, выход которого соединен с сигнальным входом ДО 40, выход которого через интегратор 41 соединен с входами первого 42 и второго 43 управляемых генераторов, третий блок вычитания 44, выход которого соединен с первым входом второго умножителя 45, выход которого соединен с вторым входом второго блока вычитания 39, первый и второй входы первого блока вычитания 37 и второй вход второго умножителя 45 являются первой группой входов ППУ 1, первый и второй входы третьего блока вычитания 44 и второй вход первого умножителя 38 являются второй группой входов ППУ1, первый 46 и второй 47 смесители, сигнальные входы которых являются соответственно первым и вторым опорными входами блока автоматической компенсации скорости цели 13, а выходы соединены соответственно через первый 48 и второй 49 фильтры с сигнальными входами третьего 50 и четвертого 51 смесителей, выходы которых соединены соответственно с входами третьего 52 и четвертого 53 фильтров, выходы которых являются соответственно первым и вторым выходами БАКСЦ 13, выход первого управляемого генератора 42 соединен с опорными входами первого 46 и второго 47 смесителей, выход второго управляемого генератора 43 соединен с опорными входами третьего 50 и четвертого 51 смесителей, первый и второй синхронизирующие входы ДО 40 являются соответственно первым и вторым синхронизирующими входами блока автоматической компенсации скорости цели 13.
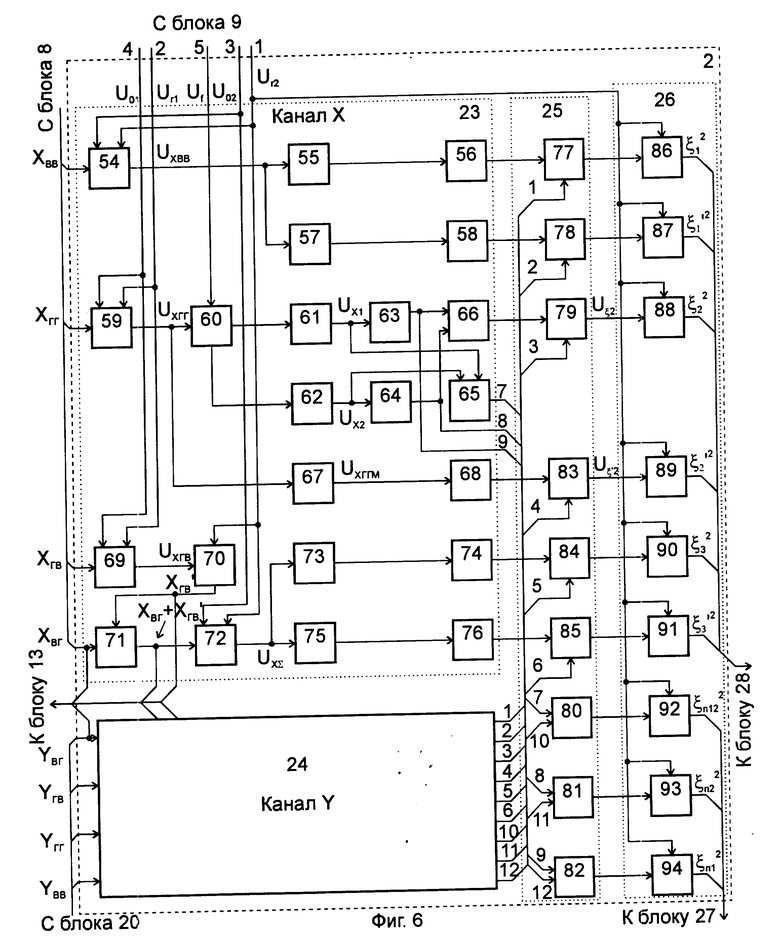
Устройство формирования изображения 2 (см. фиг. 6) содержит канал формирования изображения по квадратуре X 23, канал формирования изображения по квадратуре Y 24, блок сумматоров 25, блок временных селекторов 26. Канал формирования изображения по квадратуре X 23 содержит первый детектор огибающей 54, выход которого через первый фильтр низких частот (ФНЧ) 55 и первый квадратор 56 образует первый выход канала формирования изображения по квадратуре X 23, а через первый фильтр высоких частот (ФВЧ) 57 и второй квадратор 58 образует второй выход канала формирования изображения по квадратуре X 23, второй детектор огибающей 59, выход которого соединен с сигнальным входом коммутатора 60, первый и второй выходы которого соединены соответственно через второй 61 и третий 62 ФНЧ с входами соответственно третьего 63 и четвертого 64 квадраторов и соответственно с входами умножителя 65, выходы третьего 63 и четвертого 64 квадраторов соединены с входами первого сумматора 66, выход которого является третьим выходом канала формирования изображения по квадратуре X 23, выход первого умножителя 65 является четвертым выходом канала формирования изображения по квадратуре X 23, выходы четвертого 64 и третьего 63 квадраторов являются соответственно пятым и шестым выходами канала формирования изображения по квадратуре X 23, выход второго ДО 59 через второй ФВЧ 67 и пятый квадратор 68 образует седьмой выход канала формирования изображения по квадратуре X 23, третий детектор огибающей 69, выход которого соединен с сигнальным входом первого временного селектора (ВС) 70, выход которого соединен с первым входом второго сумматора 71, выход которого соединен с сигнальным входом четвертого детектора огибающей 72, выход которого через четвертый ФНЧ 73 и шестой квадратор 74 образует восьмой выход канала формирования изображения по квадратуре X 23, а через третий ФВЧ 75 и седьмой квадратор 76 образует девятый выход канала формирования изображения по квадратуре X 23, синхронизирующий вход коммутатора 60 является первым синхронизирующим входом канала формирования изображения по квадратуре X 23, первые синхронизирующие входы второго 59 и третьего 69 детекторов огибающей являются вторым синхронизирующим входом канала формирования изображения по квадратуре X 23, первые синхронизирующие входы первого 54 и четвертого 72 детекторов огибающей являются третьим синхронизирующим входом канала формирования изображения по квадратуре X 23, вторые синхронизирующие входы второго 59 и третьего 69 детекторов огибающей являются четвертым синхронизирующим входом канала формирования изображения по квадратуре X 23, вторые синхронизирующие входы первого 54 и четвертого 72 детекторов огибающей и синхронизирующий вход первого временного селектора 70 являются пятым синхронизирующим входом канала формирования изображения по квадратуре X 23, сигнальные входы первого 54, второго 59, третьего 69 детекторов огибающей и второй вход второго сумматора 71 являются сигнальными входами канала формирования изображения по квадратуре X 23 и первой группой сигнальных входов УФИ 2, первый, второй вход и выход второго сумматора 71 являются опорными выходами канала формирования изображения по квадратуре X 23 и первой группой опорных выходов устройства формирования изображения 2. Канал формирования изображения по квадратуре Y 24 идентичен каналу формирования изображения по квадратуре X 23, причем сигнальные входы канала формирования изображения по квадратуре Y 24 являются второй группой сигнальных входов устройства формирования изображения 2, а опорные выходы канала формирования изображения по квадратуре Y 24 являются второй группой опорных выходов УФИ 2. Блок сумматоров 25 содержит третий 77, четвертый 78, пятый 79, шестой 80, седьмой 81, восьмой 82, девятый 83, десятый 84 и одиннадцатый 85 сумматоры, первые входы которых являются первой группой входов БСМ 25 и соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым, девятым выходами канала формирования изображения по квадратуре X 23, вторые входы являются второй группой входов блока сумматоров 25 и соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым, девятым выходами канала формирования изображения по квадратуре Y 24, а выходы являются соответственно первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым и девятым выходами блока сумматоров 25. Блок временных селекторов 26 содержит второй 86, третий 87, четвертый 88, пятый 89, шестой 90, седьмой 91, восьмой 92, девятый 93 и десятый 94 временные селекторы, сигнальные входы которых являются соответственно первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым и девятым входами БВС 26 и соединены соответственно с первым, вторым, третьим, седьмым, восьмым, девятым, четвертым, пятым и шестым выходами БСМ 25, синхронизирующие входы являются синхронизирующим входом блока временных селекторов 26, выходы восьмого 92, девятого 93 и десятого 94 временных селекторов образуют первую группу выходов блока временных селекторов 26 и первую группу выходов УФИ 2, выходы второго 86, третьего 87, четвертого 88, пятого 89, шестого 90 и седьмого 91 временных селекторов образуют вторую группу выходов БВС 26 и вторую группу выходов УФИ 2.
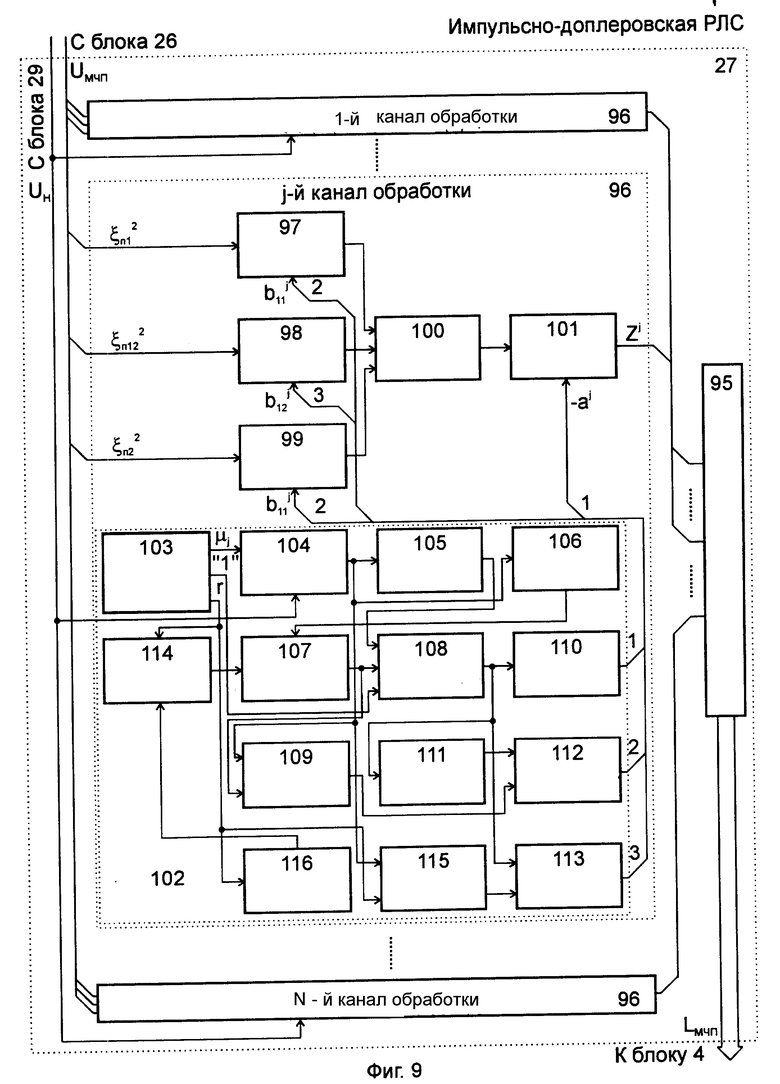
Блок распознавания по многочастотному портрету (БР МЧП) 27 (см. фиг. 9) содержит обнаружитель максимального сигнала (ОМС) 95 и N каналов обработки 96, где N - число альтернатив распознавания по МЧП, каждый j-й из которых содержит первый 97, второй 98 и третий 99 умножители, первые входы которых являются сигнальными входами БР МЧП 27, а выходы соединены с входами первого сумматора 100, выход которого соединен с первым входом первого вычитающего устройства 101, выход которого является выходом j-го канала обработки 96. Формирователь весовых коэффициентов и смещения многочастотного портрета (ФВКС МЧП) 102 содержит источник эталонных напряжений многочастотного портрета (ИЭН МЧП) 103, первый выход которого соединен с первым входом четвертого умножителя 104, выход которого соединен через первый множитель на 2 105 с первым входом второго сумматора 108, через первый квадратор 106 с первым входом пятого умножителя 107, выход которого соединен с вторым входом второго сумматора 108 и с первым входом третьего сумматора 109, выход второго сумматора 108 соединен с входом логарифмического усилителя (ЛУ) 110, через второй умножитель на 2 111 с первым входом первого делителя 112 и с первым входом второго делителя 113, выход четвертого умножителя 104 соединен с первым входом шестого умножителя 115 и с вторым входом третьего сумматора 109, выход которого соединен с вторым входом первого делителя 112, второй выход ИЭН МЧП 103 соединен с третьим входом второго сумматора 108, третий выход ИЭН МЧП 103 соединен с первым входом второго вычитающего устройства 114, через второй квадратор 116 с вторым входом второго вычитающего устройства 114 и с вторым входом шестого умножителя 115, выход которого соединен с вторым входом второго делителя 113, выход второго вычитающего устройства 114 соединен с вторым входом пятого умножителя 107, второй вход четвертого умножителя 104 является опорным входом БР МЧП 27, выход логарифмического усилителя 110 является первым выходом ФВКС МЧП 102 и соединен с вторым входом первого вычитающего устройства 101, выход первого делителя 112 является вторым выходом ФВКС МЧП 102 и соединен с вторыми входами первого 97 и третьего 99 умножителей, выход второго делителя 113 является третьим выходом ФВКС МЧП 102 и соединен с вторым входом второго умножителя 98. N входов определителя максимального сигнала 95 соединены с выходами N каналов обработки 96, а N выходов определителя максимального сигнала 95 являются выходами блока распознавания по многочастотному портрету 27.
Блок распознавания по поляризационно-спектральному портрету 28 содержит ОМС 117 и M каналов обработки 118, где M - число альтернатив распознавания по ПСП, каждый i-й из которых содержит блок модуляционной составляющей 119, три сигнальных входа которого являются модуляционными сигнальными входами БР ПСП 28, а выход соединен с первым входом первого сумматора 120, выход которого является выходом i-го канала обработки 118, блок планерной составляющей 121, три сигнальных входа которого являются планерными сигнальными входами блока распознавания по поляризационно-спектральному портрету 28, а выход соединен с вторым входом первого сумматора 120, при этом блок планерной составляющей 121 содержит первый 122, второй 123 и третий 124 умножители, первые входы которых являются сигнальными входами блока планерной составляющей 121, а выходы соединены с входами второго сумматора 125, выход которого соединен с первым входом вычитающего устройства 126, выход которого является выходом блока планерной составляющей 121, формирователь весовых коэффициентов и смещения поляризационно-спектрального портрета (ФВКС ПСП) 127, который содержит источник эталонных напряжений поляризационно-спектрального портрета (ИЭН ПСП) 128, первый выход которого соединен с первыми входами третьего 129, четвертого 130 и пятого 131 сумматоров, второй выход соединен с первыми входами четвертого умножителя 132 и первого делителя 133, третий выход соединен с первыми входами пятого умножителя 134 и второго делителя 135, четвертый выход соединен с первыми входами шестого умножителя 136 и третьего делителя 137, вторые входы четвертого 132, пятого 134 и шестого 136 умножителей являются опорным входом блока распознавания по поляризационно-спектральному портрету 28, а выходы соединены с вторыми входами соответственно третьего 129, четвертого 130 и пятого 131 сумматоров, выходы которых соединены с входами седьмого умножителя 138 и через первый 139, второй 140 и третий 141 умножители на 2 соединены с вторыми входами соответственно первого 133, второго 135 и третьего 137 делителей, выходы которых являются первым, вторым и третьим выходами ФВКС ПСП 127 и соединены с вторыми входами соответственно первого 122, второго 123 и третьего 124 умножителей, выход седьмого умножителя 138 через логарифмический усилитель 142 образует четвертый выход ФВКС ПСП 127 и соединен с вторым входом вычитающего устройства 126. M входов определителя максимального сигнала 117 соединены с выходами M каналов обработки 118, а M выходов определителя максимального сигнала 117 являются выходами блока распознавания по поляризационно-спектральному портрету 28.
РЛС работает следующим образом (см. фиг. 1).
Приемопередающее устройство 1 обеспечивает поочередное излучение зондирующих сигналов вертикальной и горизонтальной поляризации на двух фиксированных несущих частотах, когерентный прием отраженных сигналов на двух взаимно ортогональных поляризациях и выделение квадратурных составляющих этих сигналов. Первый 14 и второй 15 генераторы высокой частоты вырабатывают высокочастотные колебания f1 и f2 с некоторой относительной расстройкой по частоте Δf , необходимой для получения многочастотного портрета цели. При этом эхо-сигналы, принятые на различных несущих частотах f1 и f2, должны быть коррелированы между собой. Величина расстройки выбирается меньшей т.н. радиуса частотной корреляции Rf - минимальной расстройки двух монохроматических зондирующих сигналов, при которой эхо-сигналы являются некоррелированными. В случае сосредоточенной цели и априорной неопределенности относительно радиального распределения отражательной способности цели радиус частотной корреляции по уровню 0,5 связан с продольным размером цели Δr соотношением
Rf[MHz] = 90[MHz•m]/Δr[m]. (1)
Поэтому исходя из размеров реальных целей и равенства (1) расстройка должна иметь порядок единиц мегагерц.
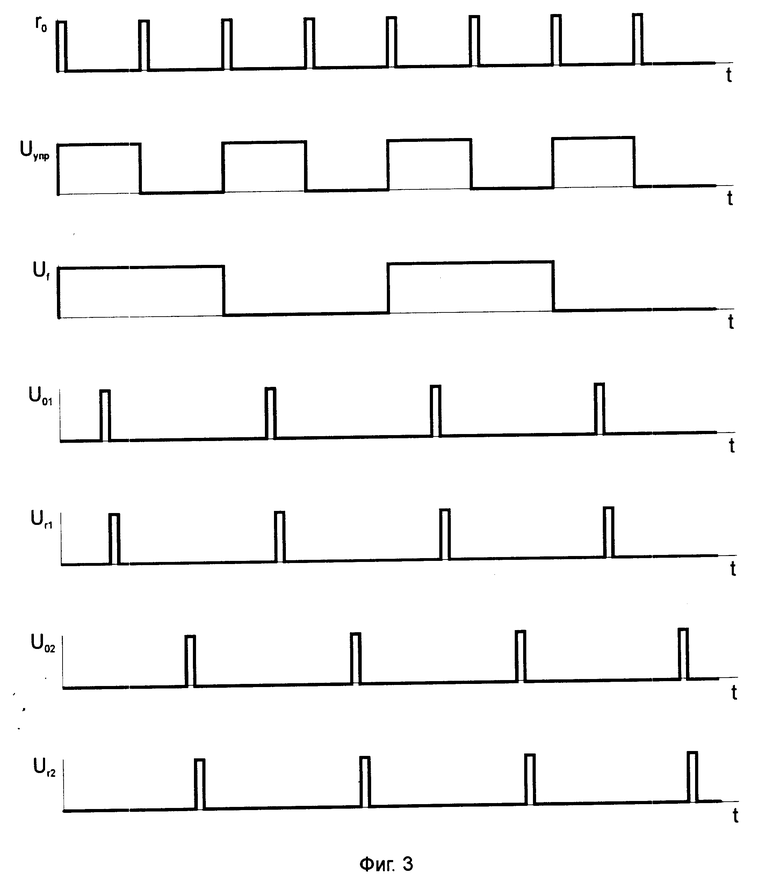
Колебания f1 и f2 поступают на сигнальные входы второго коммутатора 11, управляемого с блока синхронизации 9 (см. фиг. 2) сигналами r0 и Uf (см. фиг. 3). С первого и второго выходов второго коммутатора 9 на входы первого 6 и второго 22 АП в первый и второй периоды повторения поступают радиоимпульсы с несущей частотой f1. При этом первый зондирующий сигнал (ЗС) излучается антенной 5 непосредственно, а второй - через ВП 21. Это обуславливает ортогональность ЗС в смежные периоды повторения. В третий и четвертый периоды повторения в пространство аналогичным образом излучаются ЗС с несущей частотой f2.
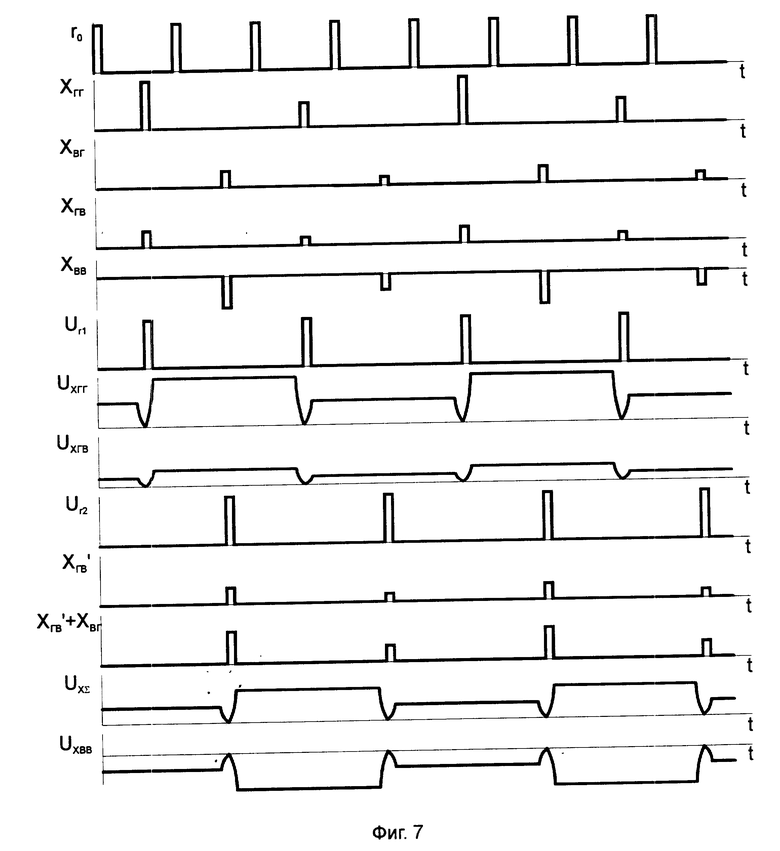
Принятая антенной 5 горизонтально поляризованная компонента эхо-сигнала поступает через первый АП 6 на сигнальные входы первого 7 и третьего 18 ФД и на второй вход БС 9, а вертикально поляризованная компонента поступает через ВП 21, второй АП 22 на сигнальные входы второго 10 и четвертого 19 ФД и на первый вход БС 9. БС 9 служит для синхронизации работы отдельных функциональных узлов РЛС и определения пространственного строба, занятого целью. С выходов БС 9 снимаются сигналы Ur1 и Ur2, временное положение которых соответствует дальности до цели при облучении ее горизонтально и вертикально поляризованными ЗС соответственно, и импульсы обнуления U01 и U02, опережающие импульсы Ur1 и Ur2 (см. фиг. 3). На опорные входы первого 7 и второго 10 ФД через третий коммутатор 12, переключаемый синхронно со сменой несущей частоты управляющим сигналом Uf, поступает гармоническое колебание с первого или второго сигнального выхода БАКСЦ 13. На опорные входы третьего 18 и четвертого 19 ФД гармоническое колебание соответствующей частоты поступает через первый 16 или второй 17 фазовращатели на 90o (также в зависимости от частоты ЗС). БАКСЦ 13 предназначен для обеспечения эквивалентной внутренней когерентности эхо-сигналов и компенсации доплеровского смещения частоты этих сигналов. Принцип его работы будет рассмотрен ниже.
Первый 8 и четвертый 20 коммутаторы, управляемые сигналами Uупр, Ur1, Ur2, служат для разделения видеосигналов, соответствующих различным сочетаниям поляризации на передачу и прием. С четырех выходов первого коммутатора 8 на сигнальные входы канала X 23 поступают сигналы XВВ, XГГ, XГВ и XВГ, где первый индекс соответствует виду поляризации на передачу, а второй - на прием (г - горизонтальная, в - вертикальная). С четырех выходов четвертого 20 коммутатора на сигнальные входы канала Y 24 поступают сигналы Yвв, Yгг, Yгв и Yвг.
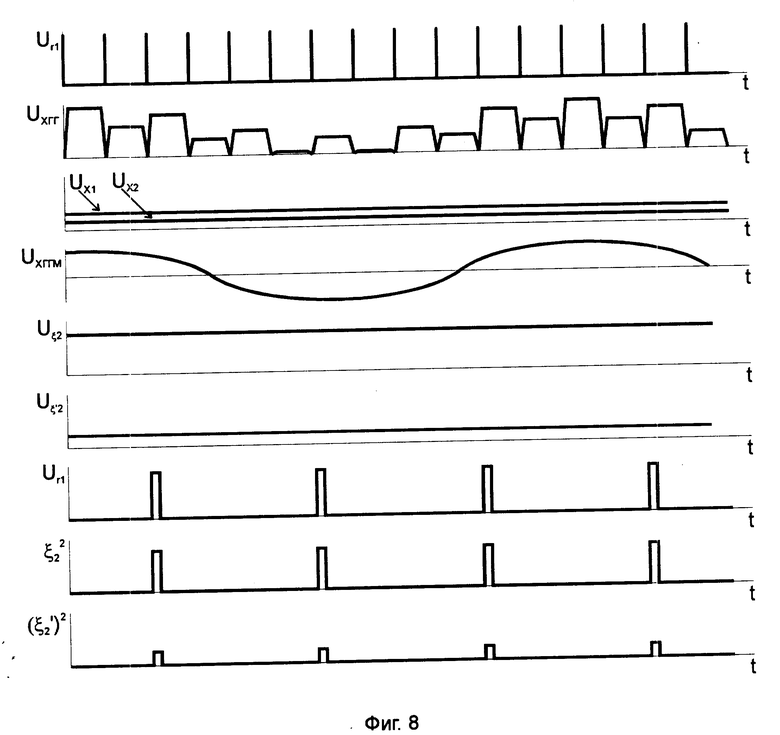
УФИ 2 (см. фиг. 6) обеспечивает формирование многочастотного и поляризационно-спектрального изображений цели в виде совокупности отсчетов, соответствующих элементам разрешения МЧП и ПСП.
Поляризационно-спектральное радиолокационное изображение цели ξ соответствующий огибающей сигнала Xвв, поступает на первый ФНЧ 55 и первый ФВЧ 57, в которых происходит выделение планерной и модуляционной составляющей. После возведения в квадрат в первом 56 и втором 58 квадраторах сигналы поступают на первые входы третьего 77 и четвертого 78 сумматоров, на вторые входы которых поступают аналогичные сигналы канала Y. После стробирования во втором 86 и третьем 87 селекторах квадратов модульных составляющих формируются сигналы ξ
соответствующий огибающей сигнала Xвв, поступает на первый ФНЧ 55 и первый ФВЧ 57, в которых происходит выделение планерной и модуляционной составляющей. После возведения в квадрат в первом 56 и втором 58 квадраторах сигналы поступают на первые входы третьего 77 и четвертого 78 сумматоров, на вторые входы которых поступают аналогичные сигналы канала Y. После стробирования во втором 86 и третьем 87 селекторах квадратов модульных составляющих формируются сигналы ξ
Сигнал ξ
Сигнал ξ поступает на коммутатор 60, управляемый сигналом Uf. Сигналы с первого и второго выходов коммутатора 60 после обработки во втором 61 и третьем 62 ФНЧ соответственно и третьем 63 и четвертом 64 квадраторах соответственно складываются в первом сумматоре 66. В пятом сумматоре 79 и четвертом ВС 78 формируется ξ
поступает на коммутатор 60, управляемый сигналом Uf. Сигналы с первого и второго выходов коммутатора 60 после обработки во втором 61 и третьем 62 ФНЧ соответственно и третьем 63 и четвертом 64 квадраторах соответственно складываются в первом сумматоре 66. В пятом сумматоре 79 и четвертом ВС 78 формируется ξ
Кроссполяризационные составляющие ξ
Многочастотное радиолокационное изображение цели ξ
Рассмотрим работу БАКСЦ 13 (см. фиг. 4). Он состоит из дискриминатора, включающего в себя первый 37, второй 39, третий 44 блоки вычитания, первый 38, второй 45 умножители и ДО 40, и исполнительной части, в состав которой входят интегратор 41, первый 42 и второй 43 управляемые генераторы, первый 46, второй 47, третий 50, четвертый 51 смесители и первый 48, второй 49, третий 52, четвертый 53 фильтры. Дискриминатор служит для формирования на входе ДО 40 сигнала ошибки Uсо:
где n - порядковый номер импульса Ur1, n=[1,..,nmax];
Tп - период повторения зондирующего сигнала;
ϕ - разность начальных фаз эхо-сигналов, принятых на частотах f1 и f2;
fк и fд - частота коррекции и доплеровская частота эхо-сигнала.
При выводе данной формулы было принято первое допущение, что величина ϕ не зависит от n, т.е. не меняется в процессе наблюдения, справедливое при
V•nmax•Tп<Rц, (3)
где V - радиальная составляющая скорости цели;
Rц - дальность до цели,
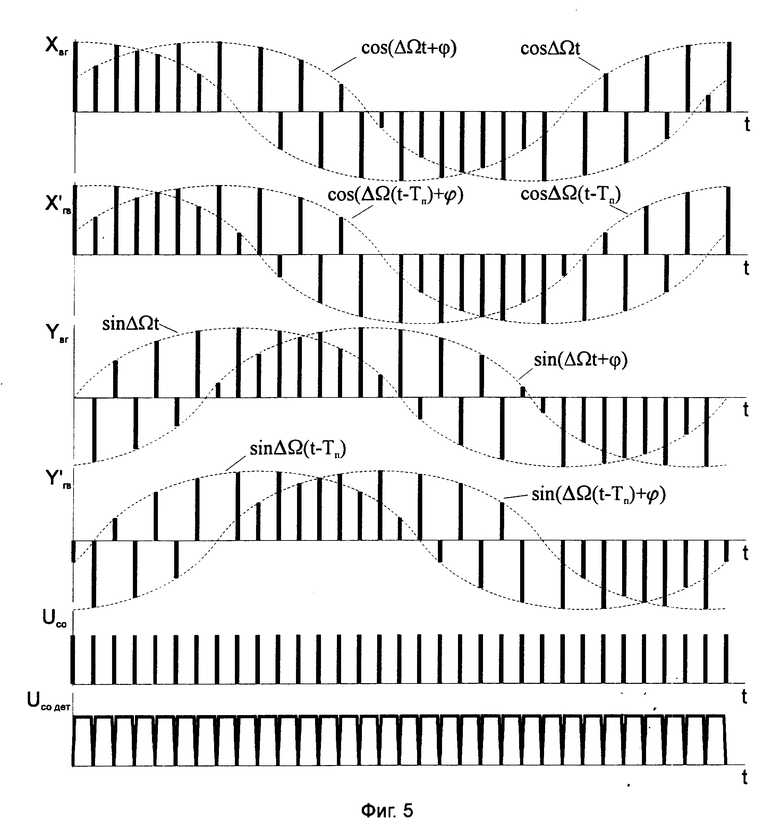
и второе допущение, что изменение ΔΩ на частотах f1 и f2 пренебрежимо мало, поскольку относительная расстройка частот МЧЗС для МЧП обычно не превышает десятых долей процента, что соизмеримо с чувствительностью ФД. Знак и величина напряжения сигнала ошибки определяются знаком и величиной рассогласования между частотой коррекции и доплеровской частотой сигнала. Эпюры напряжений, поясняющие принцип работы дискриминатора БАКСЦ при положительной расстройке (ΔΩ>0) частоты коррекции относительно доплеровской частоты, показаны на фиг.5.
Напряжение Uсо поступает на интегратор, на выходе которого формируется напряжение Uуч, управляющее частотой двух генераторов, вырабатывающих колебания с частотами Ωг+Ωк/2 и Ωг-Ωк/2. Величина и знак частоты коррекции Ωк зависят от величины и знака управляющего напряжения Uуч. Первый 48 и второй 49 фильтры БАКСЦ 13 настроены на частоты 2πf1+Ωг+Ωк/2 и 2πf2+Ωг+Ωк/2 , третий 52 и четвертый 53 - на частоты 2πf1+Ωк и 2πf2+Ωк. В установившемся режиме системы самонастройки Ωк= Ωд.
Такая автоматическая компенсация доплеровской частоты в БАКСЦ 13 обеспечивает синфазность сложения квадратурных составляющих Xгв, Xвг, Yгв и Yвг кроссполяризационных компонентов отраженного от цели сигнала и позволяет довольно просто реализовать выделение планерных и модуляционных составляющих в УФИ 2.
Многочастотный портрет ξ
Zj= b
где b
aj - смещение, соответствующее j-му классу цели;
ξ
При этом
где μj - относительная интенсивность элементов МЧП j-го класса цели, которая в случае некоррелированного фона и малой относительной расстройки Δf одинакова для всех элементов портрета j-го класса цели и должна быть априорно известна, μj = σ
σ
rj - коэффициент межэлементной корреляции МЧП j-го класса цели, который должен быть априорно известен.
В соответствии с приведенным алгоритмом весовые коэффициенты и смещение вычисляются в ФВКС МЧП 102. ИЭН 103 представляет собой запоминающее устройство, с выходов которого снимаются напряжения, соответствующие μj, "1" и rj. Единичное напряжение выбирается равным дисперсии декоррелированного фона, при этом четвертый умножитель 104, на второй вход которого поступает сигнал с блока нормировки по дальности, предназначен для изменения μj в соответствии с текущей дальностью до цели.
Поляризационно-спектральный портрет цели ξ ,
,
где  - весовые коэффициенты, соответствующие планерной и модуляционной составляющей k-го элемента изображения i-го класса цели;
- весовые коэффициенты, соответствующие планерной и модуляционной составляющей k-го элемента изображения i-го класса цели;
ai и a'i - смещения, соответствующие i-му классу цели компонентов для планерной и модуляционной составляющих; - сигналы, соответствующие сумме кроссполяризованных компонентов для планерной и модуляционной составляющих.
- сигналы, соответствующие сумме кроссполяризованных компонентов для планерной и модуляционной составляющих.
При этом
где  - относительные интенсивности k-ых элементов ПСП i-го класса цели для планерной и модуляционной составляющей.
- относительные интенсивности k-ых элементов ПСП i-го класса цели для планерной и модуляционной составляющей.
В соответствии с приведенным алгоритмом весовые коэффициенты и смещение вычисляются в ФВКС ПСП 127.
Индикатор 18 (см. фиг. 11) отображает номер, соответствующий сочетанию решений о классе целей, принятых БР ПСП 28 и БР МЧП 27.
Таким образом, предлагаемое техническое решение позволяет расширить функциональные возможности РЛС за счет распознавания класса воздушной цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 2000 |
|
RU2198426C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| АВТОКОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ПСЕВДОСЛУЧАЙНОГО ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА | 1991 |
|
RU2007875C1 |
| АВТОКОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ПСЕВДОСЛУЧАЙНОГО ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА | 1990 |
|
RU2011299C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ ПРОЦЕССОВ | 1999 |
|
RU2168763C2 |
| АВТОКОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ПСЕВДОСЛУЧАЙНОГО ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА | 1991 |
|
RU2013005C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ ПРОЦЕССОВ | 1995 |
|
RU2110806C1 |
| ДИСКРЕТНАЯ СИСТЕМА ОЦЕНИВАНИЯ | 2007 |
|
RU2398258C2 |
| ПАССИВНЫЙ ПРИЕМОПЕРЕДАТЧИК | 1999 |
|
RU2178897C2 |
| РЕЗЕРВИРОВАННАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 1991 |
|
RU2039372C1 |



Изобретение относится к радиолокации. Устройство содержит приемопередающее устройство, устройство формирования изображения, устройство распознавания класса цели, индикатор, антенну, антенные переключатели, фазовые детекторы, коммутаторы, блок синхронизации, блок автоматической компенсации скорости цели, генераторы высокой частоты, фазовращатели, вращатель поляризации, канал обработки по квадратуре Х, канал обработки по квадратуре У, блок сумматоров, блок временных селекторов, блок распознавания по многочастотному портрету, блок нормировки по дальности, что позволяет расширить функциональные возможности за счет распознавания класса воздушной цели. 4 з.п. ф-лы., 11 ил.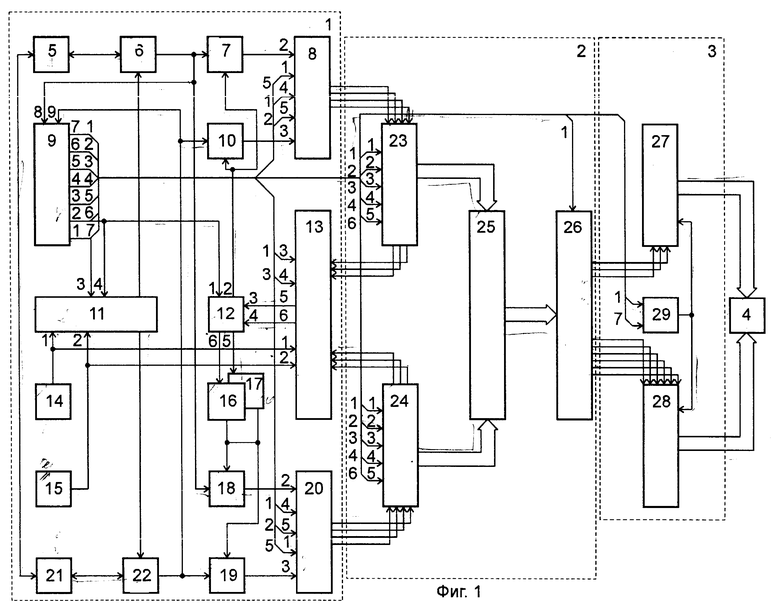
| RU, патент, 2037844, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
