Изобретение относится к системам автоматического управления и может быть использовано для линейных динамических объектов управления с широким диапазоном неизвестных, постоянных или медленно меняющихся во времени параметров. Целью изобретения является расширение функциональных возможностей системы за счет введения настраиваемого вектора параметров, числовые значения которого обычно заранее выбираются при выполнении требования гурвицевости некоторого полинома в условиях априорной неопределенности.
Известна адаптивная система управления, содержащая объект управления, блок задания коэффициентов, сумматор, два умножителя, интегратор и квадратор, предназначенная для автоматического управления линейными динамическими объектами управления с широким диапазоном неизвестных постоянных или медленно меняющихся параметров [1].
Наиболее близким к предлагаемому техническому решению является самонастраивающаяся система управления, содержащая объект регулирования, блок задания коэффициентов, сумматор, два умножителя и интегратор, предназначенная для использования в системах регулирования объектами, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины [2].
Приведенные системы управления обладают общим функциональным недостатком, заключающимся в необходимости выбора и задания элементов числового вектора настройки параметров регулятора в условиях априорной неопределенности, что, как правило, представляет собой сложную задачу, решение которой существенно затрудняется с ростом размерности систем управления. Более того, в некоторых системах априорный выбор числовых значений элементов указанного вектора, в расчете на "худший" вариант, может быть и невозможен, хотя в каждом конкретном случае, т.е. при том или ином наборе неизвестных постоянных или медленно изменяющихся параметров объекта управления решение задачи может иметь место. Таким образом, указанный недостаток существенно ограничивает функциональные возможности известных адаптивных систем управления, при построении которых используются неявные эталонные модели. В такой ситуации самонастройка вектора параметров является наиболее целесообразным, а в ряде случаев и единственно возможным подходом к построению систем управления, устойчиво работоспособных в условиях априорной неопределенности.
Поставленная цель может быть достигнута следующим образом.
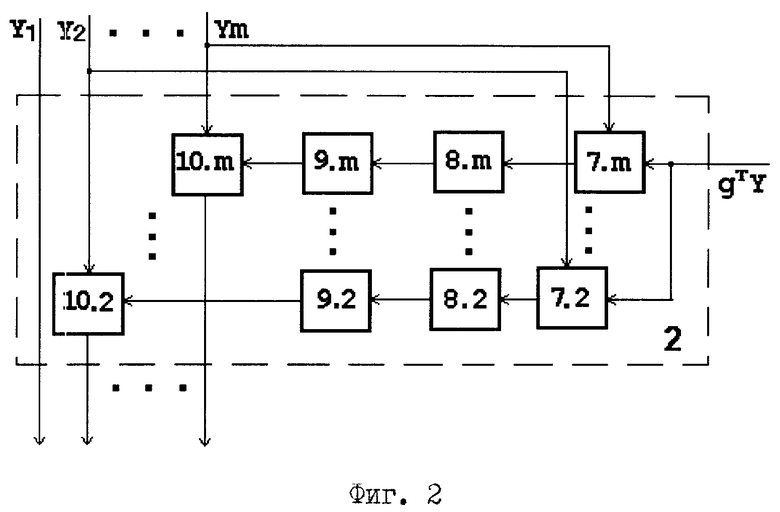
На фиг. 1 представлена функциональная схема адаптивной системы управления; на фиг. 2 - функциональная схема блока настройки коэффициентов.
Адаптивная система управления содержит объект управления 1, блок настройки коэффициентов 2, сумматор 3, первый умножитель 4, интегратор 5 и второй умножитель 6.
Адаптивная система управления работает следующим образом.
Динамика процессов в объекте управления описывается уравнениями состояния и выхода
X = AX + BU, Y = LX,
где
X - n-мерный вектор состояния объекта;
Y - m-мерный вектор выходных измеряемых координат;
U- скалярное управляющее воздействие;
A, L, B - матрицы и вектор размерностей (n•n), (m•n), (n•1) соответственно, зависящие от вектора неизвестных параметров.
К объекту подключен регулятор
U = κgTY,
где
κ - настраиваемый параметр регулятора;
gT = (1,g2,...,gm) - параметрический вектор, (m-1) параметр которого настраивается таким образом, что по окончании процесса адаптации вектор g принимает числовые значения g
Параметр регулятора настраивается в соответствии с алгоритмом адаптации
κ = -a1(gTY)2,
где
a1 > 0.
Элементы параметрического вектора настраиваются в соответствии с алгоритмами i = 2,3,...,m, ai > 0,
i = 2,3,...,m, ai > 0,
где - обозначение модуля скалярной величины.
- обозначение модуля скалярной величины.
Сигналы с выхода объекта 1 управления поступают на соответствующие входы блока 2 настройки коэффициентов. Функциональная схема блока 2 настройки коэффициентов представлена на фиг. 2. Сигнал gTY с выхода сумматора 3 поступает на первые входы каждого 7i умножителя (где i=2,3,..., m). На вторые входы каждого 7i умножителя поступают соответствующие сигналы Yi с выхода объекта управления 1. С выходов каждого 7i умножителя сигналы gTYYi поступают на входы соответствующих блоков вычисления модуля 8i (где i=2,3,...,m), где вычисляются их абсолютные значения. С выходов блоков вычисления модуля 8i сигналы  поступают на входы соответствующих интеграторов 9i (где i=2,3,...,m), где интегрируются. Сигналы gi с выходов интеграторов поступают на первые входы каждого соответствующего умножителя 10i (где i=2,3,...,m). На вторые входы умножителей 10i поступают соответствующие сигналы Yi с выходов объекта управления 1 (фиг. 1). С выхода умножителей второго блока умножения 10 (соответствующего выходу блока 2 настройки коэффициентов (фиг. 1)) сигналы поступают на входы сумматора 3 (фиг. 1), где складываются между собой и с сигналом Y1, который поступает с выхода объекта управления 1. Сигнал с выхода сумматора gTY = ∑ giYi, i=1,2,...,m, g1=1 поступает на оба входа первого умножителя 4, на вход второго умножителя 6 и на входы блока 2 настройки коэффициентов. В первом умножителе 4 происходит умножение сигнала gTY с выхода сумматора 3 на тот же сигнал. Сигнал с выхода первого умножителя 4 поступает на вход интегратора 5, где интегрируется. Сигнал κ с выхода интегратора 5 поступает на вход второго умножителя 6. Во втором умножителе 6 происходит умножение сигнала gTY с выхода сумматора 3 на сигнал κ с выхода интегратора 5. Сигнал κgTY с выхода второго умножителя 6 (сигнал управления) поступает на вход объекта управления 1.
поступают на входы соответствующих интеграторов 9i (где i=2,3,...,m), где интегрируются. Сигналы gi с выходов интеграторов поступают на первые входы каждого соответствующего умножителя 10i (где i=2,3,...,m). На вторые входы умножителей 10i поступают соответствующие сигналы Yi с выходов объекта управления 1 (фиг. 1). С выхода умножителей второго блока умножения 10 (соответствующего выходу блока 2 настройки коэффициентов (фиг. 1)) сигналы поступают на входы сумматора 3 (фиг. 1), где складываются между собой и с сигналом Y1, который поступает с выхода объекта управления 1. Сигнал с выхода сумматора gTY = ∑ giYi, i=1,2,...,m, g1=1 поступает на оба входа первого умножителя 4, на вход второго умножителя 6 и на входы блока 2 настройки коэффициентов. В первом умножителе 4 происходит умножение сигнала gTY с выхода сумматора 3 на тот же сигнал. Сигнал с выхода первого умножителя 4 поступает на вход интегратора 5, где интегрируется. Сигнал κ с выхода интегратора 5 поступает на вход второго умножителя 6. Во втором умножителе 6 происходит умножение сигнала gTY с выхода сумматора 3 на сигнал κ с выхода интегратора 5. Сигнал κgTY с выхода второго умножителя 6 (сигнал управления) поступает на вход объекта управления 1.
Таким образом, введение настраиваемого вектора параметров g позволяет: во-первых, исключить процедуру априорного выбора числового вектора, g0 из условия гурвицевости полинома g
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Изобретение относится к системам автоматического управления и может быть использовано для линейных динамических объектов управления с постоянными или медленно меняющимися параметрами. Технический результат заключается в расширении функциональных возможностей адаптивной системы управления, который достигается за счет того, что система содержит объект управления, сумматор, два умножителя, интегратор и блок настройки коэффициентов. 2 ил.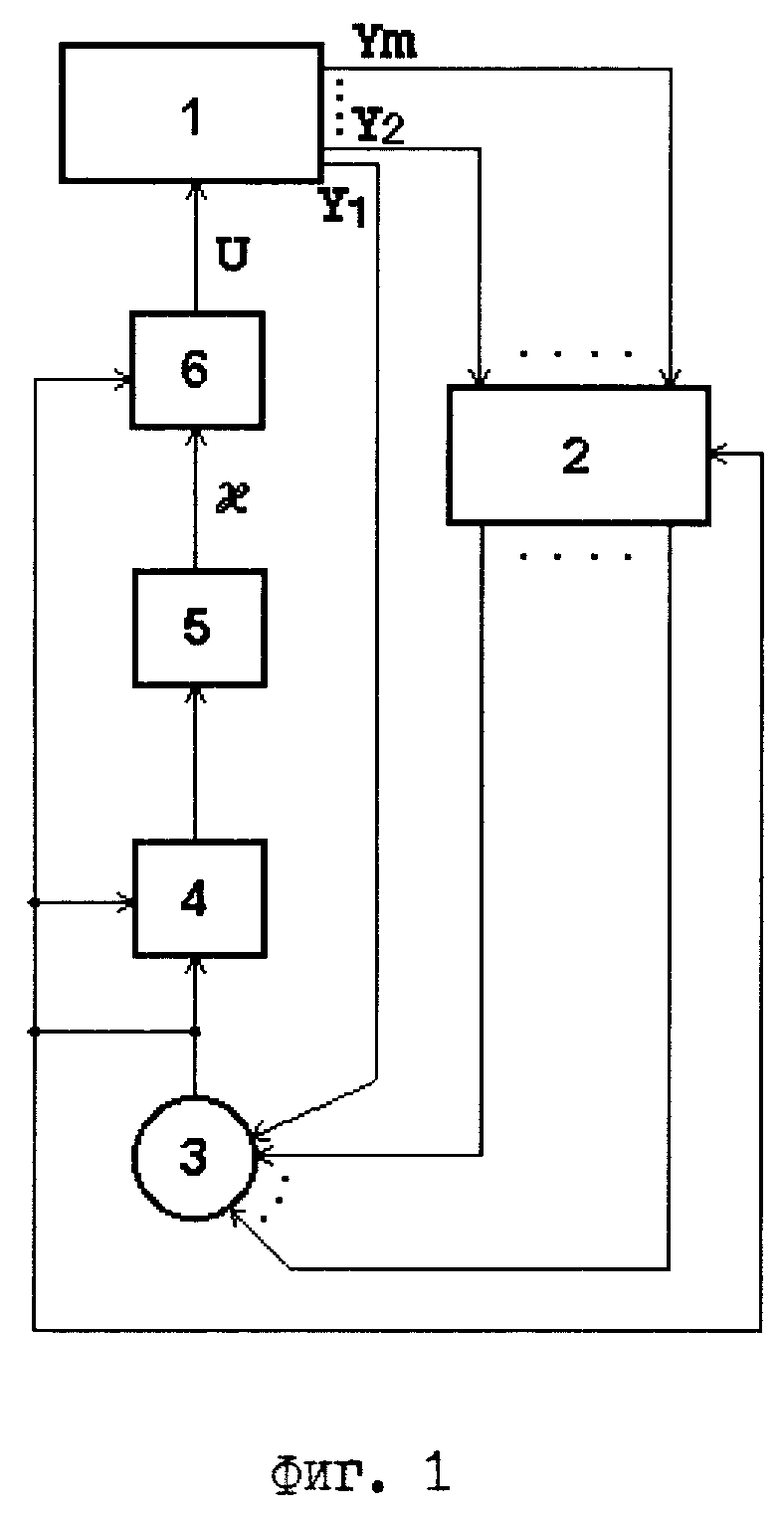
Адаптивная система управления, содержащая объект управления, сумматор, первый умножитель, интегратор и второй умножитель, причем выход сумматора соединен с обоими входами первого умножителя и с входом второго умножителя, а выход первого умножителя через интегратор связан с входом второго умножителя, выход которого соединен с входом объекта управления, отличающаяся тем, что она снабжена блоком настройки коэффициентов, входы которого соединены с выходами объекта управления, а выходы - с входами сумматора, выход которого подключен к входу блока настройки коэффициентов, а вход - к выходу объекта управления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1019400, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1578696, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
