Изобретение относится к технической кибернетике и может быть использовано в системах регулирования объектами, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины.
Наиболее близким техническим решением к предлагаемому является адаптивная система стабилизации [1], содержащая объект регулирования, блок задания коэффициентов, сумматор, первый умножитель, интегратор, второй умножитель. Сигналы с выходов объекта регулирования поступают на соответствующие входы блока задания коэффициентов, который представляет собой блок умножителей. В блоке задания коэффициентов происходит умножение сигнала с каждого выхода объекта регулирования на постоянный коэффициент. Сигналы с выходов блока задания коэффициентов поступают на соответствующие входы блока суммирования, где складываются. Сигнал с выхода блока суммирования приходит на первый вход второго умножителя и на оба входа первого умножителя. В первом умножителе происходит умножение сигнала с выхода блока суммирования на этот же сигнал. Сигнал с выхода первого умножителя поступает на вход интегратора. Сигнал с выхода интегратора поступает на второй вход второго умножителя. Во втором умножителе происходит умножение сигнала с выхода блока суммирования на сигнал с выхода интегратора. Сигнал с выхода второго умножителя поступает на вход объекта регулирования.
Недостатком этой системы, в случае наличия в объекте запаздывания по управлению, является неустойчивость положения равновесия.
Целью изобретения является обеспечение асимптотической устойчивости положения равновесия системы при наличии в объекте запаздывания по управлению.
Поставленная задача достигается тем, что в систему, содержащую блок задания коэффициентов, блок суммирования, последовательно соединенные первый умножитель, интегратор, второй умножитель, выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, входы блока суммирования подключены к соответствующим выходам блока задания коэффициентов, введены блок задержки на величину τ, второй сумматор, второй блок задания коэффициентов, второй интегратор, третий сумматор, третий интегратор, третий умножитель, четвертый умножитель, четвертый сумматор, при этом первый вход второго сумматора подключен к выходу четвертого сумматора, второй вход второго сумматора подключен к выходу блока задержки, третий вход второго сумматора связан с выходом второго блока задания коэффициентов, выход второго сумматора подключен к входу второго интегратора, выход которого подключен к первому входу третьего сумматора и к входу второго блока задания коэффициентов, второй вход третьего сумматора связан с выходом первого сумматора, выход третьего сумматора соединен с вторым входом первого умножителя и с первым входом третьего умножителя, второй вход третьего умножителя подключен к выходу первого сумматора, выход третьего умножителя подключен к входу третьего интегратора, выход третьего интегратора соединен с первым входом четвертого умножителя, второй вход четвертого умножителя связан с выходом первого сумматора, выход четвертого умножителя связан с вторым входом четвертого сумматора, а первый вход четвертого сумматора связан с выходом второго умножителя, выход четвертого сумматора подключен к входу блока задержки, к входу объекта регулирования и к первому входу второго сумматора, выход блока задержки подключен к второму входу второго сумматора, к второму входу второго умножителя, к первому входу первого умножителя.
На чертеже представлена блок-схема системы.
Система содержит объект регулирования 1, первый блок задания коэффициентов 2, первый сумматор 3, первый умножитель 4, первый интегратор 5, второй умножитель 6, второй сумматор 7, второй интегратор 8, второй блок задания коэффициентов 9, третий сумматор 10, третий умножитель 11, третий интегратор 12, четвертый умножитель 13, четвертый сумматор 14, блок задержки 15. Объект регулирования описывается уравнением
где х∈Rn - вектор состояний объекта регулирования, L - матрица выхода, у1, . . . ,ym - выходы объекта регулирования, u - скалярное управляющее воздействие, удовлетворяющее уравнению
u = -χ(α
где α0 - m - мерный вектор коэффициентов блока 2 задания коэффициентов,
α
y - m - мерный вектор выходных координат объекта.
Используя критерий гиперустойчивости Попова, можно показать, что реализуемый алгоритм настройки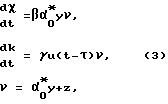
где β>0 - число, γ>0 - число, z - выход дополнительного контура, динамика которого описывается уравнением
где а0>0 - число,
обеспечивает асимптотическую устойчивость системы.
Система функционирует следующим образом.
Сигналы с выходов объекта регулирования 1 поступают на соответствующие входы блока задания коэффициентов 2. В блоке задания коэффициентов 2 происходит умножение сигнала с i-го выхода объекта регулирования 1 на постоянный коэффициент. Сигналы с выходов блока задания коэффициентов 2 поступают на соответствующие входы блока суммирования 3. Сигнал с выхода блока суммирования 3 приходит на второй вход третьего сумматора 10, на второй вход третьего умножителя 11 и на второй вход четвертого умножителя 13, сигнал с выхода третьего сумматора 10 подается на второй вход первого умножителя 4 и на первый вход третьего умножителя 11, сигнал с выхода первого умножителя 4 идет на вход первого интегратора 5, сигнал с выхода первого интегратора 5 идет на первый вход второго умножителя 6, сигнал с выхода второго умножителя 6 подается на первый вход четвертого сумматора 14, сигнал с выхода третьего умножителя 11 приходит на вход третьего интегратора 12, сигнал с выхода третьего интегратора 12 идет на первый вход четвертого умножителя 13, сигнал с выхода четвертого умножителя 13 подается на второй вход четвертого сумматора 14. Cигнал с выхода четвертого сумматора 14 идет на вход объекта регулирования 1, на первый вход второго сумматора 7 и на вход блока задержки 15, сигнал с выхода блока задержки 15 идет на второй вход второго сумматора 7, на первый вход первого умножителя 4 и на второй вход второго умножителя 6, сигнал с выхода второго сумматора 7 подается на вход второго интегратора 8, сигнал с выхода второго интегратора 8 подается на первый вход третьего сумматора 10 и на вход второго блока задания коэффициентов 9, сигнал с выхода второго блока задания коэффициентов 9 приходит на третий вход второго сумматора 7.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементарной базы.
Источники информации
1. Авторское свидетельство СССР 1019400, кл. G 05 В 13/02, 1983 (прототип).
Изобретение относится к технической кибернетике и может быть использовано в системах регулирования объектами, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины. Технический результат заключается в возможности стабилизации адаптивной системы при наличии объектов с запаздыванием по управлению. Система содержит объект регулирования, два блока задания коэффициентов, четыре сумматора, четыре умножителя, три интегратора, блок задержки. 1 ил.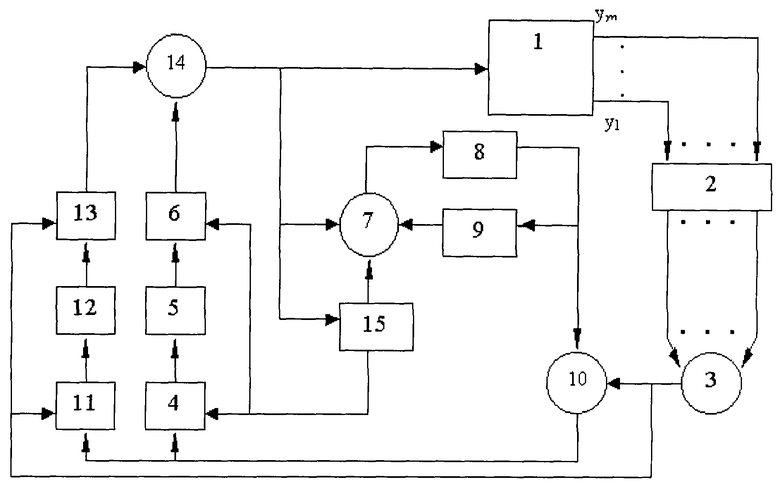
Адаптивная система стабилизации при наличии объектов с запаздыванием по управлению, содержащая первый блок задания коэффициентов, первый сумматор, последовательно соединенные первый умножитель, первый интегратор, второй умножитель, выходы объекта регулирования соединены с соответствующими входами первого блока задания коэффициентов, входы первого сумматора подключены к соответствующим выходам первого блока задания коэффициентов, отличающаяся тем, что в систему введены второй сумматор, второй блок задания коэффициентов, второй интегратор, третий сумматор, третий умножитель, третий интегратор, четвертый сумматор, четвертый умножитель; первый вход второго сумматора подключен к выходу четвертого сумматора, второй вход - к выходу блока задержки, третий вход - к выходу второго блока задания коэффициентов, выход второго сумматора связан с входом второго интегратора, выход второго интегратора соединен с входом второго блока задания коэффициентов и с первым входом третьего сумматора, второй вход третьего сумматора подключен к выходу первого сумматора, выход третьего сумматора связан с вторым входом первого умножителя и с первым входом третьего умножителя, первый вход первого умножителя и второй вход второго умножителя связаны с выходом блока задержки, выход второго умножителя подключен к первому входу четвертого сумматора, второй вход третьего умножителя связан с выходом первого сумматора, выход третьего умножителя подключен к входу третьего интегратора, выход третьего интегратора соединен с первым входом четвертого умножителя, второй вход четвертого умножителя связан с выходом первого сумматора, выход четвертого умножителя подключен к второму входу четвертого сумматора, выход четвертого сумматора связан с входом объекта регулирования и с входом блока задержки.
| Самонастраивающаяся система управления | 1982 |
|
SU1105860A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1019400A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 1998 |
|
RU2148269C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1996 |
|
RU2109317C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |
| ВЫПРЯМИТЕЛЬ | 0 |
|
SU233071A1 |

