Изобретение относится к системам автоматического управления и может быть использовано для линейных динамических объектов управления с широким диапазоном неизвестных, постоянных или медленно меняющихся во времени параметров.
Наиболее близким техническим решением к предлагаемому является адаптивная система управления /1/, содержащая объект управления, блок настройки коэффициентов, сумматор, первый умножитель, интегратор и второй умножитель, причем выход сумматора соединен с обоими входами первого умножителя и со входом второго умножителя, а выход первого умножителя через интегратор связан со входом второго умножителя, выход которого соединен со входом объекта управления, входы блока настройки коэффициентов соединены с выходами объекта управления, а выходы - со входами сумматора, выход которого подключен ко входу блока настройки коэффициентов, а вход - к выходу объекта управления.
Недостатком этой системы является то, что при действии на объект управления постоянных внешних возмущений может произойти не только значительное ухудшение качества ее функционирования, но и потеря в системе управления устойчивости.
Целью изобретения является улучшение качества управления при действии на объект постоянных внешних возмущений.
Поставленная цель достигается тем, что в системе, содержащей объект управления, блок настройки коэффициентов, сумматор, первый умножитель, интегратор и второй умножитель, причем выход сумматора соединен с обоими входами первого умножителя и со вторым входом второго умножителя, выход первого умножителя через интегратор связан с первым входом второго умножителя, выход которого соединен со входом объекта управления, первые входы блока настройки коэффициентов соединены с выходами объекта управления, выходы блока настройки коэффициентов соединены со входами сумматора, дополнительно введен нелинейный блок, вход которого соединен с выходом сумматора, а выход подключен ко второму входу блока настройки коэффициентов.
Вводя в систему нелинейный блок, получают новую функцию, которая заключается в том, что при действии на объект управления постоянных внешних возмущений, система сохраняет свою работоспособность.
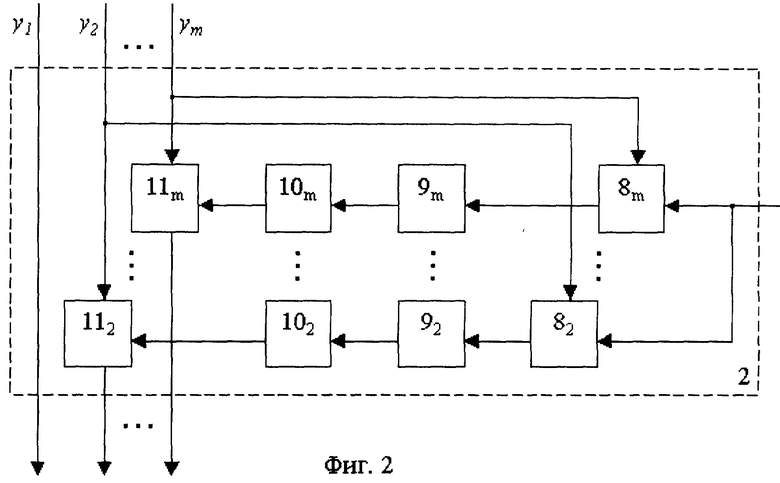
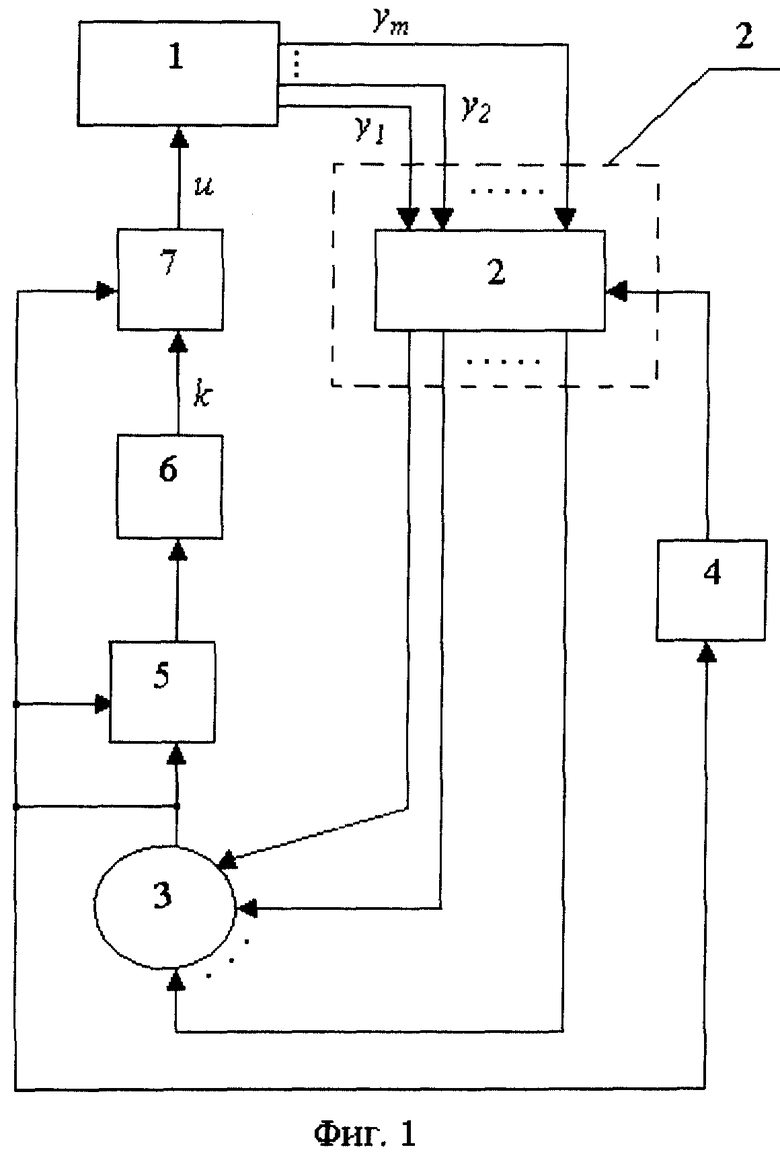
На фиг.1 представлена функциональная схема адаптивной системы управления; на фиг.2 - функциональная схема блока настройки коэффициентов.
Адаптивная система управления содержит объект управления 1, блок настройки коэффициентов 2, сумматор 3, нелинейный блок 4, первый умножитель 5, интегратор 6, второй умножитель 7.
Адаптивная система управления работает следующим образом.
Динамика процессов в объекте управления описывается уравнениями состояния и выхода

где x(t) - n-мерный вектор состояния объекта;
y(t) - m-мерный вектор выходных измеряемых координат;
u(t) - скалярное управляющее воздействие;
f(t) - n-мерный вектор постоянных внешних возмущений;
A, L, b - матрицы и вектор размерностей (n*n), (m*n), (n*1) соответственно, зависящие от вектора неизвестных параметров.
К объекту подключен регулятор
u(t)=k(t)gT(t)y(t),
где k(t) - настраиваемый параметр регулятора;
gT(t)=(1,g2(t),...,gm(t)) - параметрический вектор, (m-1) параметр которого настраивается таким образом, что по окончании процесса адаптации вектор g(t) принимает числовые значения  обеспечивающие выполнение условия гурвицевости полинома
обеспечивающие выполнение условия гурвицевости полинома  степени (n-1) с положительными коэффициентами, где (Inp-А)+ - присоединенная матрица.
степени (n-1) с положительными коэффициентами, где (Inp-А)+ - присоединенная матрица.
Параметр регулятора настраивается в соответствии с алгоритмом адаптации

где a1>0.
Элементы параметрического вектора настраиваются в соответствии с алгоритмами


δ0=const>0.
Сигналы с выхода объекта 1 управления поступают на соответствующие первые входы блока 2 настройки коэффициентов. Функциональная схема блока 2 настройки коэффициентов представлена на фиг.2. Сигнал gT(t)y(t) с выхода сумматора 3 поступает на вход нелинейного блока 4. Сигнал F(gT(t)y(t)) с выхода нелинейного блока 4 поступает на первые входы каждого 8i умножителя (i=2, 3,...,m). На вторые входы каждого 8i умножителя поступают соответствующие сигналы yi(t) с выхода объекта управления 1. С выходов каждого 8i умножителя сигналы yi(t)F(gT(t)y(t)) поступают на входы соответствующих блоков вычисления модуля 9i (i=2, 3,...,m), где вычисляются их абсолютные значения. С выходов блоков вычисления модуля 9i сигналы  поступают на входы соответствующих интеграторов 10i (i=2, 3,...,m), где интегрируются. Сигналы gi(t) с выходов интеграторов 10i поступают на первые входы каждого соответствующего умножителя 11i (i=2, 3,...,m). На вторые входы умножителей 11i поступают соответствующие сигналы yi(t) с выходов объекта управления 1 (фиг.1). С выходов умножителей 11i (соответствующих выходам блока 2 настройки коэффициентов) сигналы поступают на входы сумматора 3 (фиг.1), где складываются между собой и с сигналом yi(t), который поступает с выхода объекта управления 1. Сигнал с выхода сумматора gT(t)y(t)=Σgi(t)yi(t), i=1, 2,...,m, g1=1 поступает на оба входа первого умножителя 5 и на второй вход второго умножителя 7. В первом умножителе 5 происходит умножение сигнала gT(t)y(t) с выхода сумматора 3 на тот же сигнал. Сигнал с выхода первого умножителя 5 поступает на вход интегратора 6, где интегрируется. Сигнал k(t) с выхода интегратора 6 поступает на первый вход второго умножителя 7. Во втором умножителе 7 происходит умножение сигнала gT(t)y(t) с выхода сумматора 3 на сигнал k(t) с выхода интегратора 6. Сигнал k(t)gT(t)y(t) с выхода второго умножителя 7 (сигнал управления) поступает на вход объекта управления 1.
поступают на входы соответствующих интеграторов 10i (i=2, 3,...,m), где интегрируются. Сигналы gi(t) с выходов интеграторов 10i поступают на первые входы каждого соответствующего умножителя 11i (i=2, 3,...,m). На вторые входы умножителей 11i поступают соответствующие сигналы yi(t) с выходов объекта управления 1 (фиг.1). С выходов умножителей 11i (соответствующих выходам блока 2 настройки коэффициентов) сигналы поступают на входы сумматора 3 (фиг.1), где складываются между собой и с сигналом yi(t), который поступает с выхода объекта управления 1. Сигнал с выхода сумматора gT(t)y(t)=Σgi(t)yi(t), i=1, 2,...,m, g1=1 поступает на оба входа первого умножителя 5 и на второй вход второго умножителя 7. В первом умножителе 5 происходит умножение сигнала gT(t)y(t) с выхода сумматора 3 на тот же сигнал. Сигнал с выхода первого умножителя 5 поступает на вход интегратора 6, где интегрируется. Сигнал k(t) с выхода интегратора 6 поступает на первый вход второго умножителя 7. Во втором умножителе 7 происходит умножение сигнала gT(t)y(t) с выхода сумматора 3 на сигнал k(t) с выхода интегратора 6. Сигнал k(t)gT(t)y(t) с выхода второго умножителя 7 (сигнал управления) поступает на вход объекта управления 1.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Источник информации
1. Патент на изобретение РФ №2109317, кл. G 05 В 13/02, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2155362C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 2000 |
|
RU2182348C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1996 |
|
RU2109317C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 1998 |
|
RU2148269C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2008 |
|
RU2379735C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С НАБЛЮДАТЕЛЕМ ПЕРЕМЕННЫХ СОСТОЯНИЯ ДЛЯ ОБЪЕКТА С ЗАПАЗДЫВАНИЕМ | 2009 |
|
RU2405182C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С НАБЛЮДАТЕЛЕМ ПЕРЕМЕННЫХ СОСТОЯНИЯ ДЛЯ ОБЪЕКТА С ЗАПАЗДЫВАНИЯМИ | 2013 |
|
RU2541097C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2282883C1 |
Изобретение относится к системам автоматического управления и может быть использовано для линейных динамических объектов управления с широким диапазоном неизвестных, постоянных или медленно меняющихся во времени параметров. Технический результат заключается в улучшении качества управления при действии на объект постоянных внешних возмущений. Система содержит блок настройки коэффициентов, соединенный с выходом объекта управления, сумматор, нелинейный блок, два умножителя, интегратор, выход второго умножителя подключен к объекту управления. 2 ил.
Адаптивная система управления, содержащая объект управления, блок настройки коэффициентов, сумматор, первый умножитель, интегратор и второй умножитель, причем выход сумматора соединен с обоими входами первого умножителя и со вторым входом умножителя, выход первого умножителя через интегратор связан с первым входом второго умножителя, выход которого соединен со входом объекта управления, первые входы блока настройки коэффициентов соединены с выходами объекта управления, выходы блока настройки коэффициентов соединены со входами сумматора, отличающаяся тем, что она дополнительно снабжена нелинейным блоком, вход которого соединен с выходом сумматора, а выход подключен ко второму входу блока настройки коэффициентов, причем нелинейный блок предназначен для реализации функциональной зависимости
где δ0=const>0;
y(t) - вектор выходных измеряемых координат объекта управления;
gT(t) - параметрический вектор с настраиваемыми параметрами.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1996 |
|
RU2109317C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2155362C1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1019400A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1105860A1 |
| ВЫПРЯМИТЕЛЬ | 0 |
|
SU233071A1 |

