Изобретение относится к средствам контроля и управления полем температуры пространственно распределенных объектов и может быть использовано в автоматизированных системах управления технологическими процессами.
Известны способы синтеза модального управления пространственно распределенными температурными полями с помощью системы сосредоточенных нагревателей [1]. В [2] описан способ управления нагревом образца, основанный на первоначальном математическом моделировании, численном определении тепловых параметров, т.е. предварительной теоретической идентификации параметров модели объекта, и последующего управления температурой в условиях лабораторного эксперимента. Невязка (отклонение реальной температурной кривой от требуемой) составляла в этом случае 15...20%, что было обусловлено неполнотой исходных данных, применяемых для расчетов.
Недостатком способа, основанного только на предварительном математическом моделировании [2] (прототип), является то, что при теоретической идентификации объекта на основании математического моделирования невозможно точно определить значения тепловых параметров, необходимых для синтеза управления, что приводит к снижению качества управления температурным полем.
Задача изобретения заключается в повышении качества многоканального управления температурным полем пространственно распределенного объекта путем применения метода идентификации тепловых параметров, адекватных объекту, и последующего синтеза управления с использованием заданных параметров.
Задача решается с помощью экспериментального определения значений тепловых параметров, необходимых для выработки качественного управления температурным полем объекта. При этом распределенный объект (бесконечномерная система) аппроксимируется конечномерной системой, а в качестве параметров состояния объекта выбирают температурные моды, которые формируют в виде конечного набора ортогональных линейных комбинаций показаний температурных датчиков, коэффициенты в которых, параметризующие тепловые свойства объекта, определяют экспериментально путем обработки данных, полученных из динамики системы в специально созданных условиях, моделирующих условия эксплуатации. Компоненты вектора управления находят в виде линейных комбинаций мощностей сосредоточенных нагревателей, возбуждающих ортогональные температурные моды, нормированные коэффициенты в линейных комбинациях также определяют в предварительном эксперименте путем обработки данных отклика системы на ступенчатые воздействия, создаваемые отдельными нагревателями. В случае объекта с большими характерными временами для экономии времени параметры состояния и коэффициенты в линейных комбинациях мощностей нагревателей определяют в одном эксперименте, для чего включают выбранный нагреватель, снимают показания датчиков во время разогрева, затем нагреватель выключают и продолжают измерения, эксперимент повторяют для каждого нагревателя, причем по результатам температурных измерений для свободной динамики объекта определяют параметры состояния, а по кривым разогрева определяют значения коэффициентов в линейных комбинациях мощностей нагревателей.
Места расположения датчиков на объекте выбирают на основании предварительного теоретического анализа упрощенной математической модели объекта с соблюдением выполнения условий наблюдаемости и управляемости. Уточнение влияния формы объекта, граничных условий, конструктивных особенностей и условий эксплуатации на тепловые свойства объекта исследуют экспериментально в режиме идентификации, что позволяет с максимально возможной степенью точности идентифицировать параметры системы для данной конструкции и вырабатывать наиболее качественное оптимальное управление применительно к конкретным условиям эксплуатации. Повышение точности регулирования при применении предлагаемого способа зависит от конструкции объекта и системы термостабилизации, но составляет не менее 20...50% по сравнению с прототипом.
Приведем теоретическое обоснование предлагаемого способа. Если известно решение уравнения теплопроводности для поля температуры T(r,t) в виде разложения по собственным функциям краевой задачи Фn(r) (гармоникам): ,
,
где
Xn(t) - коэффициент разложения (амплитуды гармоник или моды), r - координаты, t - время, то показания температурного датчика, расположенного в точке ra (a - номер датчика), в момент времени t должны иметь вид: ,
,
Динамика отдельных мод Xn описывается уравнениями, эквивалентными уравнению теплопроводности: ,
,
где
τn - собственные времена, Pn - амплитуды тепловых воздействий на отдельные моды со стороны внешних источников тепла: .
.
Здесь обозначено Nnb = Фn(rb), Qb - мощность нагревателя, расположенного в точке rb. Если нагреватели распределены непрерывно, так что
Qb(r) = Qbfb(r),
где
Qb - амплитуда, а fb(r) - заданная функция, нормированная на единичную мощность, то .
.
Обозначая ,
,
можно как и ранее, записать это равенство в виде (4). Случай точечных источников сводиться к непрерывному, если формально ввести fb(r) = δ(r-rb)(cp.[1]) .
Отметим, что для промежутков времени
t > τN (6)
точное равенство (2) может быть заменено приближенным путем отбрасывания части мелкомасштабных гармоник с большими n (конечная аппроксимация): .
.
Fan=Фn(ra)
Собственные функции краевой задачи Фn(r) для объектов со сложной геометрией, которые и представляют практический интерес, точно не известны, а нагреватели и датчики можно считать точечными лишь приближенно, поэтому компоненты матриц в (4) и в (7), а также собственные времена τn являются некоторыми величинами, параметризующими тепловые свойства регулируемого объекта, в том числе граничные условия и свойства датчиков и нагревателей. Именно об идентификации этих величин идет речь далее.
Суть предлагаемого способа идентификации и управления температурным полем объекта состоит в следующем. В качестве параметров состояния системы выбираются величины ,
,
где
Ta(t) (a = 1,...,N) - показания датчиков, а матрица Gna (обратная к матрице Fan) определяется следующим образом в предварительных экспериментах. Согласно уравнениям (3) величины Xn в (8) должны релаксировать по одноэкспоненциальному закону: ,
,
где
Xn(0) - начальные значения амплитуд. Измерения Ta(t) для свободной динамики объекта в некоторые последовательные моменты времени t0, t1,... после снятия тепловых воздействий в момент t0 позволяют по методу наименьших квадратов с учетом (9) определить величины Gna в (8) так, чтобы моды Xn были ортогональны друг другу, т.е. релаксировали независимо.
Управление Pn вырабатывается независимо для каждой величины Xn на основании уравнения (3), которое для этого записывается в конечно-разностном виде. Для известного набора значений Pn (компоненты вектора управления), согласно (4) определяются величины управляющих воздействий: .
.
Компоненты матрицы Mbn также определяются в специальном эксперименте. Для этого включаются последовательно все нагреватели, снимаются показания датчиков Ta(t) и из системы уравнений (4), (8) с помощью решения уравнения (3) с начальным условием Xn(0) = 0:
определяются компоненты матрицы Nnb, а затем определяется матрица M, как обратная к матрице N: M = N-1.
С целью уменьшения времени на идентификацию, определение матриц G и M предлагается проводить в одном эксперименте по следующей программе: включить нагреватель, снять показания датчиков (динамику разогрева), затем нагреватель отключить, продолжая измерения температуры Pn = 0, свободная динамика). Обработка данных с помощью метода наименьших квадратов по свободной динамике даст компоненты матрицы G, а обработка данных о разогреве позволит определить компоненты матрицы M.
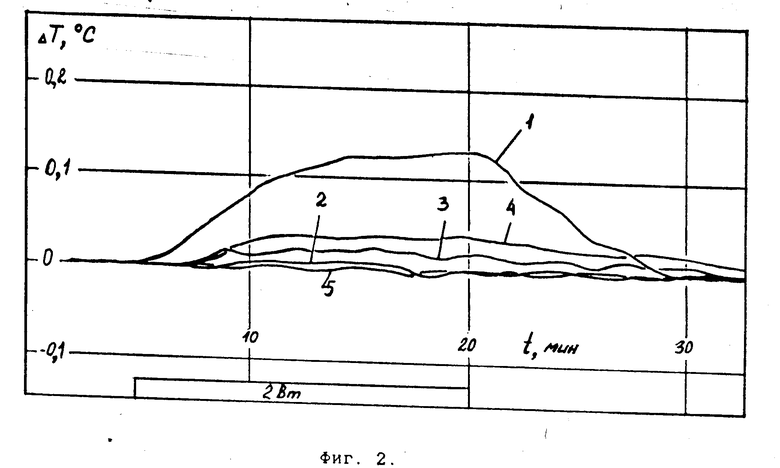
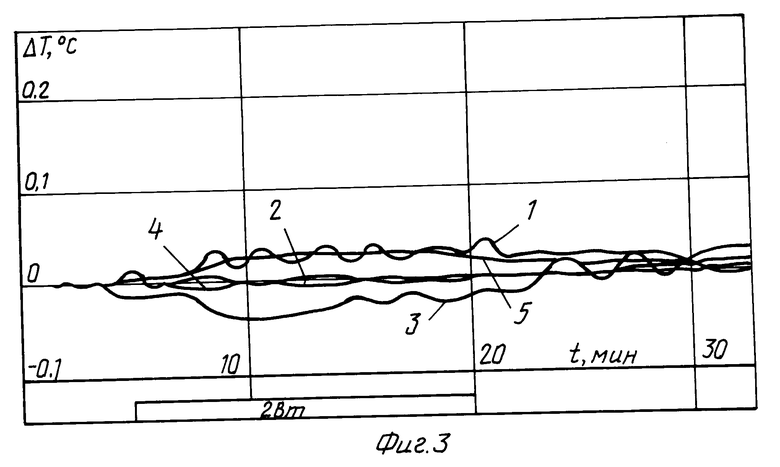
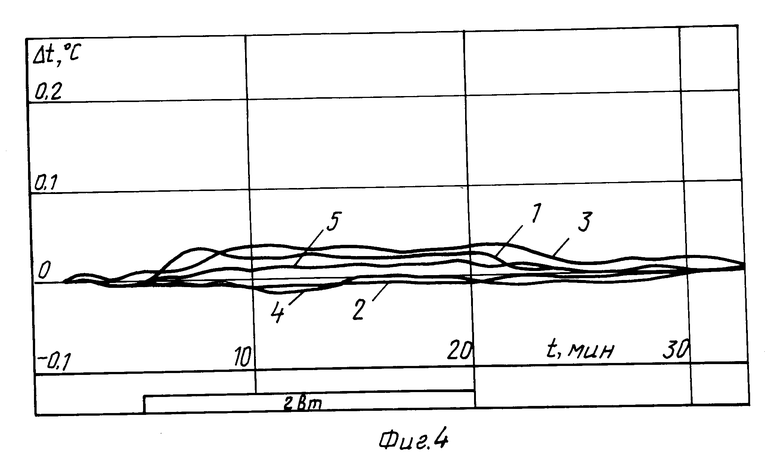
На фиг. 1 изображена блок-схема системы, предназначенной для реализации предлагаемого способа. В состав системы входят датчики температуры 2 и нагреватели, расположенные на термостатируемом объекте 1, блок измерений 4, устройство обработки информации 5 (ЭВМ), блок управления нагревателями 6 и источник питания нагревателей 7. Графики на фиг. 2-4 показывают сравнительные результаты работы системы по регулированию градиентов температуры с использованием и без использования патентуемого способа. На графиках приведены показания температурных датчиков при ступенчатом одностороннем внешнем тепловом воздействии на термостатируемый объект; цифрами указаны номера датчиков. На фиг. 2 приведены показания датчиков в отсутствии регулирования; на фиг. 3 показана работа системы регулирования при использовании теоретической идентификации тепловых параметров объекта (прототип); на фиг. 4 приведены показания температурных датчиков при осуществлении регулирования с помощью идентификации тепловых параметров объекта в предлагаемом эксперименте (патентуемый способ).
Поясним результаты примера реализации предлагаемого способа подробнее. В качестве термостатируемого объекта был выбран - прямоугольный брусок из дюралюмина с теплоизолированными границами, для измерения температурного поля использовались 5 дифференциальных датчиков, показывающих разность температур ΔT между чувствительными элементами, для управления использовались 10 нагревателей контактного типа, размещенных на объекте.
Если считать нагреватели точечными, расположенными симметрично относительно центра, легко рассчитать регулировочную матрицу Man: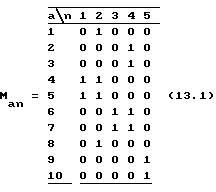
Для определения матрицы M опытным путем были проведены тестирующие воздействия по предлагаемому способу. После обработки экспериментальных данных была получена следующая регулировочная матрица M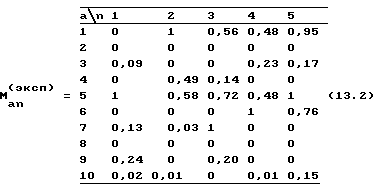
Как видим, между экспериментальной матрицей и теоретической существуют заметные отличия. Они объясняются тем, что экспериментальная матрица правильно учитывает размеры нагревателей и их взаимное расположение, что оказывается важным для исследования объекта, обладающего высокой теплопроводностью.
Целью управления в описываемом примере являлось поддержание однородности температурного поля объекта, в том числе при наличии внешних тепловых воздействий.
Система управления работала в течение 30 мин. В процессе работы системы на объект подавалось одностороннее тепловое воздействие, вызывавшее перегрев по длине бруска, соответствующий перепад температур измерялся датчиком N1. Мощность воздействия 2 Вт, время включения - 15 мин: от 5-ой до 20-ой минуты работы системы термостабилизации.
Изменение показаний всех пяти датчиков с течением времени в отсутствие регулирования показано на фиг. 2. На фиг. 3 показана работа системы регулирования при том же внешнем воздействии, матрица регулирования определялась теоретически - см. матрицу (13.1). На фиг. 4 приведен результат терморегулирования с помощью способа, предлагаемого в данной заявке: предварительная идентификация осуществлялась экспериментально (матрица (13.2)), управляющие воздействия вырабатывались по пяти независимым каналам с применением цифровой вычислительной техники.
Сравнение графиков фиг. 3 и фиг. 4 показывает что во втором случае управления более плавное, без режима раскачки, величины перепадов температуры (отклонение показаний датчиков от нуля) уменьшены в 1,5...2 раза, т.е. предлагаемый способ управления повышает качество регулирования в рассмотренном примере на 30...40% по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОЛИТ ДЛЯ ПОЛУЧЕНИЯ НИКЕЛЬ-ПОЛИТЕТРАФТОРЭТИЛЕНОВЫХ ПОКРЫТИЙ | 1991 |
|
RU2033482C1 |
| ЗОНД ДЛЯ ИССЛЕДОВАНИЯ ЖЕЛУДОЧНО-КИШЕЧНОГО ТРАКТА | 1990 |
|
RU2103915C1 |
| ДИ(4-ДИМЕТИЛАМИНОФЕНИЛ)ДИТЕЛЛУРИД В КАЧЕСТВЕ ПРОМЕЖУТОЧНОГО ПРОДУКТА В СИНТЕЗЕ ЕГО ДИЙОДМЕТИЛАТА, ЯВЛЯЮЩЕГОСЯ ИНГИБИТОРОМ КИСЛОТНОЙ КОРРОЗИИ СТАЛИ | 1991 |
|
RU2032665C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2149354C1 |
| Устройство обратного проецирования для получения изображения объекта в вычислительной томографии | 1988 |
|
SU1599871A1 |
| ФАЗОВЫЙ МОДУЛЯТОР ВОЛНОВОГО ФРОНТА | 1994 |
|
RU2080638C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЬЕЗОМОДУЛЕЙ | 1989 |
|
SU1648175A1 |
| СПОСОБ ПОЛУЧЕНИЯ МАГНИТООПТИЧЕСКИХ СТРУКТУР | 1992 |
|
RU2038432C1 |
| ВИБРОГИРОСКОП | 1997 |
|
RU2123219C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2115884C1 |
Изобретение может быть использовано в автоматизированных системах управления технологическими процессами, а именно в средствах контроля и управления полем температуры пространственно распределенных объектов. Цель изобретения - повышение качества многоканального управления температурным полем пространственно распределенного объекта путем применения метода идентификации тепловых параметров, адекватных объекту, и последующего синтеза управления с использованием найденных параметров. Сущность изобретения заключается в том, что в качестве параметров состояния объекта используют температурные моды, которые формируют в виде конечного набора ортогональных линейных комбинаций показаний температурных датчиков, коэффициенты в которых определяют экспериментально путем обработки данных, полученных из динамики системы в специально созданных условиях, моделирующих условия эксплуатации. Компоненты вектора управления находят как линейные комбинации мощностей нагревателей, возбуждающие ортогональные температурные моды, нормированные коэффициенты в линейных комбинациях также определяют в предварительном эксперименте путем обработки данных отклика системы на ступенчатые воздействия, создаваемые отдельными нагревателями. Способ повышает точность регулирования температурного поля распределенного объекта на 20 - 50% по сравнению с прототипом. 1 з.п.ф-лы, 4 ил.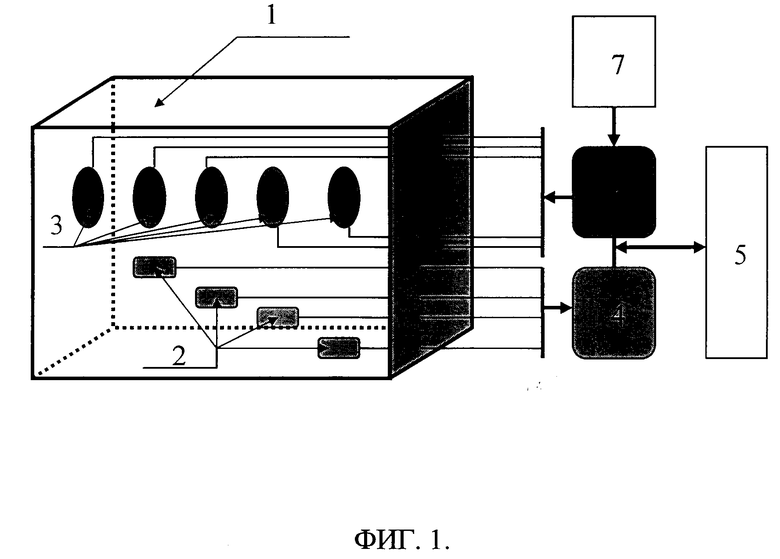
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Уткин В.И., Орлов Ю.В | |||
| Теория бесконечномерных систем управления на скользящих режимах | |||
| - М.: Наука, 1990, гл.5. | |||
