Изобретение относится к устройствам с однократным преобразованием электроэнергии, выполняемым на полностью управляемых (двухоперационных) полупроводниковых вентилях при питании от m-фазной сети переменного тока, и может быть применено, например, в регулируемом электроприводе постоянного или переменного тока.
Заявленное техническое решение направлено на повышение качества напряжения вентильных преобразований за счет уменьшения низкочастотных сетевых пульсаций выпрямленного напряжения простыми средствами управления.
В указанных областях большое применение начинают получать m-фазные преобразователи на полностью управляемых вентилях (транзисторных ключах, двухоперационных, а также искусственно или комбинированно выключаемых тиристорах), которые могут сочетать в себе известные достоинства вентильных преобразователей с непосредственной связью и широтно-импульсных преобразователей (ШИП) со звеном постоянного тока. Наибольшее применение в подобных устройствах получают способы управления вентилями, основывающиеся на принципе широтно-импульсной модуляции (ШИМ). Однако качество выходного напряжения сетевых широтно-импульсных преобразователей (СШИП) может быть низким, в связи с наличием в его составе низкочастотных пульсаций, изменяющихся с частотой выпрямленного напряжения ωn = mωc.
Известны способы управления преобразователями указанного класса, например непосредственными преобразователями частоты с искусственной коммутацией тиристоров, устраняющие влияние сетевых пульсаций на выходные координаты преобразователей или электроприводов на их основе, например, основывающиеся на непрерывном сравнении напряжений всех фаз сети с эталонным управляющим сигналом. Однако практическая реализация их усложнена, так как требует компьютерной обработки довольно обширной информации.
Наиболее близким к предлагаемому техническому решению следует признать способ широтно-импульсного регулирования, основывающийся на идее равноинтегрального попеременного отклонения выходного напряжения от приведенного к выходной цепи управляющего сигнала на каждом периоде тактовой частоты модуляции. Сходные существенные признаки в данном случае состоят в том, что выходная цепь преобразователя циклически подключается с тактовой частотой поочередно к двум фазам питающей сети, имеющим в начале текущего такта значения напряжений в одной фазе - большее, а в другой - меньшее по сравнению с приведенным напряжением управления. Регулирование длительности подключения осуществляется на основе сравнения управляющего и периодически изменяющегося опорного напряжений по признаку равенства интегральных отклонений выходного напряжения от приведенного значения управляющего сигнала в ту и другую стороны на каждом из двух интервалов периода тактовой частоты.
Недостатком прототипа является сложность реализации, в связи с необходимостью вычисления и сравнения на каждом такте двух интегральных отклонений управляющего сигнала, изменяющихся в разных направлениях, а потому требующего определения в начале каждого такта начальных условий интегрирования. Очевидно, что данная задача наиболее точно может быть решена лишь с помощью специальных вычислительных средств. Вместе с тем на практике наибольшее применение получают простые устройства импульсно-фазового направления и широтно-импульсной модуляции, работа которых основывается на так называемом вертикальном принципе, предполагающем формирование импульсов управления в моменты равенства управляющего и периодически изменяющегося синхронно с сетью опорного (развертывающего) сигналов.
Таким образом, целью изобретения является повышение качества выходного напряжения СШИП за счет уменьшения низкочастотных пульсаций простыми средствами управления на основе вертикального принципа. Для этого предлагается опорное напряжение формировать путем суммирования двух составляющих, одну из которых при этом получать интегрированием с начала такта при нулевых начальных условиях разности большего и меньшего напряжений указанных фаз и усреднения результата на периоде тактовой частоты, а в качестве второй составляющей принять меньшее напряжение указанных фаз.
Суть предложенного решения направлена на то, чтобы среднее значение выходного напряжения на каждом такте определялось величиной управляющего сигнала в момент переключения и в определенных пределах не зависело от изменений сетевых напряжений по гармоническому закону. Для компенсации влияния изменений сетевых напряжений предусматривается автоматическое изменение формы опорных сигналов и соответствующее изменение длительности ширины импульсов. Устройство управления, работающее по предложенному способу, может иметь простую традиционную структуру, содержащую узлы синхронизации и формирования опорного сигнала, сравнения управляющего и опорного напряжений, а также формирования фронтов управляющих импульсов в моменты равенства указанных напряжений. Упрощение достигается благодаря принятому допущению, согласно которому управляющее напряжение и одно из напряжений указанных фаз не претерпевают заметных изменений внутри периода тактовой частоты. Существенная новизна предложенного способа состоит в указанном алгоритме формирования опорного напряжения.
На фиг. 1 представлены диаграммы управляющего и выходного напряжений СШИП, иллюстрирующие возможность появления низкочастотных пульсаций при обычном способе реализации широтно-импульсного регулирования на основе вертикального принципа; на фиг. 2 - диаграммы с помощью которых показано существенное уменьшение низкочастотных пульсаций при управлении по предлагаемому способу; на фиг.3 - диаграммы иллюстрируют качество выходного напряжения СШИП в разных точках диапазона регулирования при управлении по предлагаемому способу; на фиг. 4 - кривая статической регулировочной характеристики рассматриваемого варианта преобразователя; на фиг.5 - диаграммы, позволяющие сравнить форму выходного напряжения СШИП при обработке управляющего сигнала гармонического вида при управлении на основе двух подходов; на фиг.6 - функциональная схема устройства; на фиг. 7 - принципиальная схема устройства (вариант); на фиг.8 - работа устройства с помощью диаграмм.
Анализ причин недостатка известного решения и описание предлагаемого способа дается на примере работы 3-фазной однополупериодной схемы выпрямления при тактовой частоте модуляции 600 Гц. Полагается, что модуляция осуществляется по принципу односторонней ШИМ-2 на основе сравнения управляющего Uу и опорного Uоп напряжений, причем последнее имеет периодическую линейно изменяющуюся форму, синхронизованную с моментами перехода фазных или линейных напряжений сети через ноль и постоянную амплитуду Uопм (фиг.1). Изменение управляющего напряжения по величине (вертикали) приводит к соответствующему изменению ширины импульсов выходного напряжения. Известно, что в процессе модуляции могут участвовать разные фазы сети, например фазы, имеющие наибольшее положительное и отрицательное напряжение, или фазы, напряжения которых минимально отличаются от приведенного к выходной цепи управляющего сигнала. Предлагаемый способ может быть реализован в рамках обоих указанных подходов, однако за основу в описании принят первый, как более простой при выполнении.
Полезной составляющей выходного импульсного напряжения преобразователей принято считать среднее значение, которое на i-ом периоде тактовой частоты T определяется разностью вольт-секундных площадей под кривыми разнополярных фазных напряжений U1, U2, участвующих в процессе модуляции
где tγ= 0÷T - регулируемая длительность импульса напряжения положительного знака.
Переписывая данное выражение в следующем виде
можно заметить, что при широтно-импульсном регулировании наблюдается равенство интегральных отклонений выходного напряжения на периоде T в обе стороны от среднего значения. Указанные участки вольт-секундных площадей выделены на всех представленных диаграммах штриховкой. Линейная периодическая форма опорных напряжений обеспечивает при постоянстве управляющего сигнала такое же постоянство ширины выходных импульсов. В условиях, меняющихся по гармоническому закону сетевых напряжений U1, U2, это является причиной колебаний среднетактовых значений выходного напряжения на периоде пульсаций выпрямленного напряжения 2π/mωc. Подобный подход к рассмотрению низкочастотных пульсаций как изменениям среднетактовых значений выходного напряжения упрощает анализ и делает его все более точным по мере увеличения частоты модуляции. Результаты вычисления среднетактовых напряжений отображены на фиг.1 в виде горизонтальных линий. Получение значения Udi использовались для вычисления среднего выпрямленного напряжения
где  - кратность отношения периода низкочастотных пульсаций к периоду тактовой частоты (здесь n=4).
- кратность отношения периода низкочастотных пульсаций к периоду тактовой частоты (здесь n=4).
Для сравнительной оценки низкочастотных пульсаций воспользуемся определением коэффициента пульсаций в следующем виде
где Udмакс Udмин - максимальное и минимальное значения среднетактового напряжения на периоде 2π/mωc.
Проведенные расчеты показывают, что коэффициент пульсаций при указанной фазности и тактовой частоте принимает значения Kп=0,54 при Uу=0,33Uопм и Kп= 0,2 при Uу=0,83Uопм. Очевидно, что для уменьшения Kп необходимо стремиться к равенству среднетактовых значений выходного напряжения на уровне, зависящем лишь от управляющего сигнала. Для этого на каждом такте должно существовать равенство
где  - приведенное к выходной цепи управляющее напряжение;
- приведенное к выходной цепи управляющее напряжение;
Udo= 0,83Um-максимальное среднее выпрямленное напряжение на выходе рассматриваемого преобразователя.
Поставленная задача управления сводится к отысканию длительности импульсов tγ по заданной величине управляющего сигнала Uy в условиях меняющихся по гармоническому закону напряжений питания. Один из известных вариантов решения этой задачи усматривается, если переписать уравнение, как это делалось ранее, в форме равноинтегральных отклонений
Ввиду трансцендентности данное уравнение может быть решено путем перебора значений времени tγ= 0÷T , начиная с нуля. Однако аппаратная реализация в этом случае представляется затруднительной в связи с нулевым начальным значением интеграла справа. Более простой путь решения можно предложить, если переписать исходное выражение в виде
а затем сгруппировать члены уравнения, как показано ниже
Полагая, ввиду малости T, что напряжение Uy(t) и U2(t) на периоде тактовой частоты несущественно отклоняются от своих значений в момент t = tγ , исходное уравнение перепишем в окончательном виде
Согласно последнему уравнению искомый интервал tγ может быть найден как промежуток времени от начала текущего периода T до момента равенства двух напряжений, представленных слева и справа. В соответствии с упомянутым вертикальным принципом выражение слева может выполнять роль опорного (развертывающего) сигнала повторяющейся формы. Внутри каждого периода T эта форма определяется накапливающимся с нуля междуфазным интегральным напряжением, смещенным на величину фазного напряжения U2(t). От одного такта к другому форма опорного сигнала не остается постоянной, имея период повторяемости, равный периоду низкочастотных пульсаций 2π/mωc Результаты расчета опорных сигналов Uoni=f(t) по левой части уравнения (9) на всех четырех (i= 1-4) тактах периода пульсаций представлены на фиг.2,3. В данном случае форма этих сигналов близка к линейной, но амплитуда отклонений как в положительную, так и отрицательную стороны неодинакова. Так, например, относительная амплитуда отклонений напряжения в положительную сторону потактно составляет U
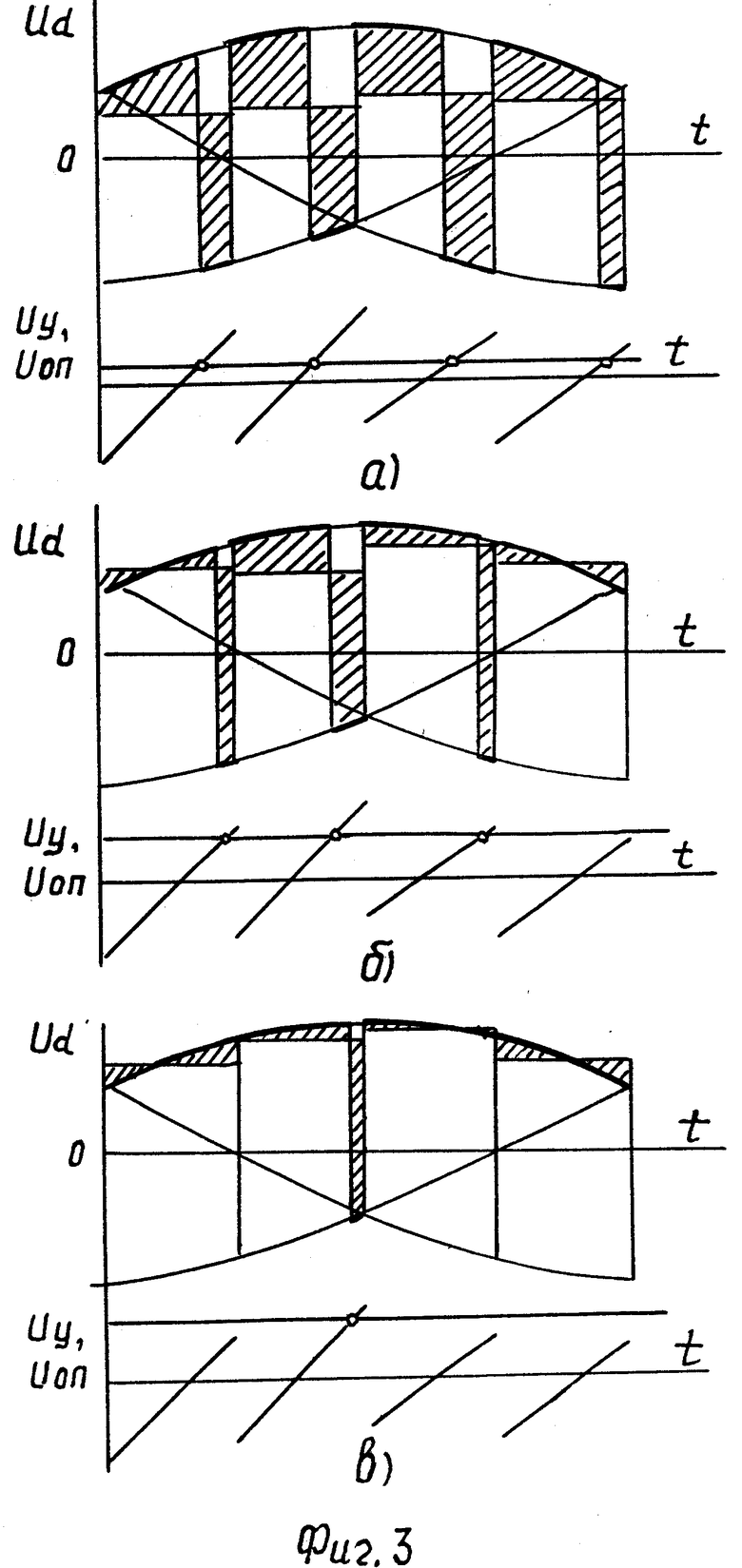
В данной части диапазона управляющий сигнал достаточно мал, поэтому выходное напряжение содержит на периоде все четыре модулированных по ширине импульса /фиг. 2,3, а/. Необходимые для определения коэффициента пульсаций вычисления проводились с помощью записанных ранее формул. Так, например, длительность импульсов tγi можно определить, задаваясь U
где  начальные фазы напряжений сети, участвующих в процессе модуляции U1, U2. Из представленных на фиг.2,3,а результатов расчетов видно, что предлагаемый способ практически устраняет пульсацию при малых значениях управляющего сигнала U
начальные фазы напряжений сети, участвующих в процессе модуляции U1, U2. Из представленных на фиг.2,3,а результатов расчетов видно, что предлагаемый способ практически устраняет пульсацию при малых значениях управляющего сигнала U
 В связи с превышением управляющего сигнала над амплитудой U
В связи с превышением управляющего сигнала над амплитудой U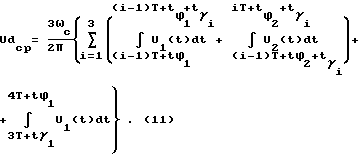
Аналогичные расчеты показали, что абсолютный перепад среднетактовых напряжений на данном участке диапазона регулирования возрос (фиг.3,б). Однако коэффициент пульсаций, как относительный показатель, остался на сравнительно низком уровне и составляет Kn=0,15 при U В связи с превышением управляющего сигнала над амплитудными значениями опорного напряжения трех тактов
В связи с превышением управляющего сигнала над амплитудными значениями опорного напряжения трех тактов
U
в процессе модуляции участвует лишь один импульс напряжения на втором такте, а остальные находятся в насыщении (фиг. 3,в). На данном участке среднее выходное напряжение определялось
Аналогичные расчеты показали, что коэффициент пульсаций остается также на сравнительно низком уровне Kn=0,17 при U
Приведенные уравнения позволили рассчитать зависимости, связывающие значения относительного управляющего напряжения, приведенного к выходной цепи преобразователя  с угловой длительностью импульсов
с угловой длительностью импульсов  , а также средними за такт Udi и за период Udcp относительными значениями выходного напряжения.
, а также средними за такт Udi и за период Udcp относительными значениями выходного напряжения.
Результаты этих вычислений для рассматриваемого варианта преобразователя сведены в таблицу.
Анализ представленных данных помогает убедиться, что предлагаемый способ в сравнении с известным техническим решением уменьшает перепад среднетактовых напряжений во всем диапазоне регулирования. Однако лучшее качество выходного напряжения можно получить лишь в нижней части диапазона, когда в процессе модуляции участвуют все тактовые импульсы в составе выходного напряжения. Очевидно, что данный участок диапазона регулирования можно расширить, если увеличить тактовую частоту модуляции или увеличить фазность (пульсность) схемы выпрямления.
С помощью приведенных данных был построен и проанализирован график статической регулировочной характеристики U*dcp= f(U*yот) рассматриваемого преобразователя на фиг. 4. Видно, что большей части (70%) диапазона регулирования эта характеристика обладает приемлемой для инженерных целей степенью линейности и симметрии с относительными отклонениями от идеальной прямой не более 15 %. Однако в верхней части крутизна характеристики уменьшается, что связано с выходом импульсов напряжения в режим насыщения. Здесь же начинает проявляться и несимметрия характеристики, выражающаяся в том, что максимальное значение среднего выпрямленного напряжения Udo=±0,83Uм в выпрямительном и инверторном режимах может быть получено при разных значениях положительного и отрицательного управляющего сигналов. Причина заключается в несимметрии картин выходного импульсного напряжения при положительном и отрицательном сигналах управления. Однако подобная несимметрия наблюдается лишь при четной кратности отношения периода низкочастотных пульсаций к периоду тактовой частоты. Напомним, что в рассмотренном примере эта кратность равна  При нечетной кратности указанная несимметрия может быть устранена. Очевидно также, что линейный участок регулировочной характеристики может быть расширен при увеличении тактовой частоты и пульсности выпрямителя.
При нечетной кратности указанная несимметрия может быть устранена. Очевидно также, что линейный участок регулировочной характеристики может быть расширен при увеличении тактовой частоты и пульсности выпрямителя.
При наличии регулировочной характеристики статический коэффициент усиления преобразователя может быть определен в окрестностях рабочей точки
 -приращение среднего значения выходного напряжения;
-приращение среднего значения выходного напряжения; -приращение управляющего напряжения.
-приращение управляющего напряжения.
Характер проведения рассматриваемого преобразователя в динамике при отработке гармонически изменяющегося сигнала управления, отражен на диаграммах фиг. 5, а. Кривые выходного напряжения и его составляющих найдены графическим путем в результате отыскания моментов переключений в точках равенства управляющего и опорных кривых, а также отыскание среднетактовых уровней выходного напряжения из условия равенства заштрихованных площадей. Пунктирная кривая, соединяющая эти уровни в указанных точках, представляет собой полезную (гладкую) составляющую выходного напряжения. В данном случае, как отмечалось выше, кривая выходного напряжения преобразователя образована наибольшими положительными и отрицательными напряжениями сетевых фаз. Значительный перепад мгновенных значений этого напряжения в моменты переключений является недостатком данного подхода к организации широтно-импульсного регулирования в сетевых преобразователях. Возможность реализации предлагаемого способа в рамках другого подхода, уменьшающего указанный перепад мгновенных напряжений, подтверждается диаграммами на фиг. 5,б. В данном случае в процессе образования выходного напряжения участвуют фазы сети, напряжения в которых минимально отличаются от приведенного к выходной цепи управляющего сигнала. Расчету опорных напряжений на данных диаграммах по уравнению (9) предшествовало отыскание указанных фаз сети. Видно, что период повторяемости формы опорных сигналов в подобных динамических режимах оказывается равным периоду управляющего сигнала. В этой связи аппаратная реализация данного подхода может быть сложнее, однако качество выходного напряжения улучшается. Так как сравнение данных вариантов реализации предлагаемого способа в задачу не входит, ниже приводится описание устройства для выполнения предлагаемого способа согласно варианту на фиг.5,а.
Предлагаемый способ можно применить для управления реверсивным преобразователем, выполненным по 3-фазной однотактной схеме выпрямления на встречно-параллельно соединенных двухоперационных тиристорах (фиг.6,7). Один из возможных вариантов этого устройства содержит источник синхронизирующих напряжений в виде согласующего трансформатора 1, формирователь синхроимпульсов 2, выполненный на транзисторных ключах с подключенными на выходах дифференцирующими цепями. На общем выходе 3 формируются синхроимпульсы U3, совпадающие с моментами перехода фазных и линейных направлений сети через ноль (фиг. 8). Имеется также широтно-импульсный модулятор, содержащий узел 4 формирования опорного напряжения. Последнее сравнивается на входе 5 устройства сравнения 6 с управляющим напряжением. Выходы формирователя синхроимпульсов и устройства сравнения подключены к соответствующим входам распределителя управляющих импульсов 7, выходы которых связаны с входами выходных усилителей 8, 9, 10. Усилитель 8 имеет две гальванически развязанных выходных цепи для подключения к управляющим переходам силовых тиристоров 12, 13 фазы А. Аналогичным образом усилитель 9 связан с управляющими цепями тиристоров 14, 15 фазы В, а усилитель 10 - тиристоров 15, 16 фазы С. В свою очередь узел формирования опорного напряжения содержит интегратор на операционном усилителе 17 и усилитель 18 для формирования напряжения смещения. Распределитель импульсов выполнен на основе R-S-триггеров 19-24 с подключенными на выходах логическими схемами совпадения 25 - 30. Выходы указанных логических схем попарно объединены и подключены к входам соответствующих выходных усилителей.
Полагается, что управление вентильными комплектами реверсивного преобразователя осуществляется путем одновременной подачи управляющих импульсов на каждую пару встречно-параллельных тиристоров. Известно, что такой способ реализации совместного управления возможен лишь в преобразователях на полностью управляемых вентилях и наряду с простотой исключает возможность появления уравнительного тока как в статике, так и в динамике.
Устройство работает следующим образом. Благодаря указанному на схеме фиг. 7 подключению формирователя 2 на общем выходе 3 последнего появляются синхроимпульсы U3, совпадающие с моментами перехода фазных и линейных напряжений сети через ноль, задающие тактовую частоту модуляции 600 Гц. Эти импульсы подаются на базу разрядного транзистора, шунтирующего конденсатор обратной связи интегратора 17. На вход последнего подается выпрямленное напряжение 3-фазного диодного моста Ubx17, форма которого, как известно, определяется разностью наибольших значений фазных напряжений питающей сети. В результате на выходе интегратора 17 будет формироваться интегральная составляющая опорного сигнала указанной тактовой частоты. Это напряжение складывается с напряжением смещения, выделяющимся на выходе усилителя 18. Согласно предлагаемому способу, последнее должно состоять из участков, фазных напряжений, имеющих наибольшие отрицательные значения. Для получения этого сигнала на вход усилителя 18 подается выпрямленное напряжение с выхода 3-фазной нулевой схемы выпрямления. Получаемое в точке 5 опорное напряжение U4 сравнивается с управляющим напряжением на входе устройства сравнения 6. В результате на прямом выходе последнего будет формироваться знакопеременный импульсный сигнал уравнения U6, ширина положительного и отрицательного импульса которого должна определять длительность включенного состояния соответствующей пары силовых тиристоров. При указанном выполнении устройства сравнения на основе одновходового компаратора ширина положительного импульса в составе U6 должна определять длительность включенного состояния той пары тиристоров, которая подключена к фазе с наибольшим напряжением, а ширина отрицательного импульса - длительность включенного состояния тиристоров фазы с наибольшим положительным напряжением. Для соответствующего распределения управляющих импульсов служат логические схемы совпадения 25-30, подключенные первыми входами к выходам триггеров 19-24. Благодаря соответствующему подключению входов этих триггеров к фазным выходам формирователя синхроимпульсов на их выходах формируются импульсы длительностью 2π/3, на участках, где соответствующие фазные напряжения имеют наибольшие положительные значения U19, U21, U23 и наибольшие отрицательные значения U20, U22, U24.
Например, на интервале наибольшего положительного напряжения в фазе А такой импульс появиться на выходе триггера 19. Этот импульс поступит на первый вход логической схемы 25, второй вход которой подключен к инверсному выходу устройства сравнения 6. В результате на указанном интервале с помощью усилителя 8 на управляющие электроды силовых тиристоров 11, 12, начнут подаваться управляющие импульсы, длительность которых будет соответствовать ширине отрицательного импульса на входе компаратора 6. В подготовленном к включению состоянии окажутся оба указанных тиристора, однако в проводящем состоянии только один, что зависит от направления тока нагрузки. Причем, если на указанном интервале во включенном состоянии окажется тиристор 11, это будет соответствовать выпрямительному режиму, а если тиристор 12 - инверторному режиму работы преобразователя. Аналогично работают и другие каналы распределения управляющих импульсов.
Таким образом, рассмотренный вариант устройства достаточно прост и не требует введения каких-либо дополнительных составных частей по сравнению с известными устройствами, работающими по вертикальному принципу. Очевидно, что реализация предложенного способа широтно-импульсного регулирования возможна не только аппаратным путем с применением аналоговых или цифровых элементов, но также и программным способом. Расширению областей возможного применения данного технического решения способствует происходящее в настоящее время повышение единичной мощности выпускаемых полностью управляемых вентилей. Положительный эффект от применения данного способа управления растет, как отмечалось, при увеличении тактовой частоты широтно-импульсной модуляции и увеличении пульсности схемы выпрямления.







Изобретение может быть использовано для управления m-фазными преобразователями с непосредственной связью нагрузки и питающей сети, выполненными на двухоперационных вентилях или тиристорах с искусственной коммутацией. Данное техническое решение способствует повышению качества выходного напряжения за счет уменьшения низкочастотных сетевых пульсаций и может быть реализовано на основе простых средств управления, работающих по вертикальному принципу. Согласно предложению, компенсация сетевых пульсаций ведется на основе соответствующего изменения ширины выходных импульсов, исходя из равенства интегральных отклонений выходного напряжения от приведенного к выходу управляющего сигнала на каждом периоде тактовой частоты модуляции, для чего опорное (развертывающее) напряжение предложено формировать суммированием двух составляющих, одну из которых при этом получать интегрированием с начала такта при нулевых начальных условиях разности большего и меньшего напряжения фаз сети, участвующих в процессе модуляции, а в качестве второй составляющей принять меньшее напряжение указанных фаз. 1 табл., 8 ил.
Способ широтно-импульсного регулирования напряжения на выходе сетевого преобразователя путем циклического подключения с тактовой частотой выходной цепи преобразователя поочередно к двум фазам питающей сети, имеющим в начале текущего такта значения напряжений в одной фазе большее, а в другой - меньшее по сравнению с приведенным к выходу напряжением управления, а также регулирование длительности подключения к фазе с большим напряжением на основе сравнения управляющего и периодически изменяющегося опорного напряжений по признаку равенства интегральных отклонений выходного напряжения от приведенного значения управляющего напряжения в ту и другую стороны на каждом из двух интервалов периода тактовой частоты, отличающийся тем, что опорное напряжение формируют путем суммирования двух составляющих, одну из которых получают интегрированием с начала такта при нулевых начальных условиях разности большего и меньшего напряжений сетевых фаз и усреднения результата на периоде тактовой частоты, а в качестве второй составляющей принимают меньшее напряжение указанных фаз.
| Рутманис Л.А | |||
| и др | |||
| Способы управления преобразователями частоты с непосредственной связью и искусственной коммутацией | |||
| Рига, Зинатне, 1976, с | |||
| Рогульчатое веретено | 1922 |
|
SU142A1 |
