Изобретение относится к преобразовательной технике и может быть применено для управления m-фазными преобразователями, выполненными на IGBT, MOSFET-транзисторных модулях или на тиристорах с искусственной коммутацией.
Выполнение сетевых преобразователей на двухоперационных (запираемых) вентилях создает предпосылки для устранения такого недостатка, как ограниченное быстродействие. Одним из способов достижения предельного быстродействия вентильного преобразователя (ВП) и систем автоматического управления на его основе является релейное управление.
Известны способы асинхронного, в частности релейного управления ВП, основывающиеся на переключении вентилей в моменты равенства интегральных отклонений выходной ЭДС преобразователя в обе стороны от приведенного к сетевому входу управляющего сигнала (см. Способы управления преобразователями частоты с непосредственной связью и искусственной коммутацией. Под ред. А. Ф. Крогериса. : Рига. Зинатне. 1976. 159 с. ). Наиболее близким техническим решением следует признать способ управления "по интегралу" (см. Л. Джюджи, Б. Пелли Силовые полупроводниковые преобразователи частоты. Пер. с англ. : М. : Энергоатомиздат, 1983, с. 263). Сходные существенные признаки состоят в переключении вентилей по признаку равноинтегральных отклонений выходной ЭДС преобразователя в обе стороны от приведенного управляющего сигнала, что предусматривает получение разностного сигнала между мгновенными значениями ЭДС фазы с включенными вентилями и приведенным управляющим сигналом, получение интегральной ошибки регулирования путем интегрирования указанного разностного сигнала, выключение работавшего и одновременное включение очередного вентилей в момент достижения интегральной ошибки регулирования установленного значения.
Недостатком данного технического решения следует признать недоиспользование динамических возможностей ВП, что ограничивает частотную полосу пропускания на том же уровне, какой существует у преобразователей, выполненных на обычных однооперационных вентилях, зависящем от частоты питающей сети. Причина указанного недостатка вытекает из положенного в основу порядка циклического переключения вентилей в моменты достижения интегральной ошибки регулирования нулевого значения. Последнее может иметь место лишь в том случае, если указанный разностный сигнал чередует свой знак на каждом интервале повторяемости, а это, в свою очередь, требует, чтобы скорость изменения управляющего сигнала была меньше частоты изменения сетевого напряжения. Альтернативные способы расширения частотной полосы пропускания ВП при релейном управлении предусматривают управление по производной управляющего воздействия, что ввиду дискретности и сложного закона модуляции в сетевых преобразователях трудно реализуемо.
Таким образом, целью изобретения являлось релейное управление ВП на частотах, превышающих частоту питающего сетевого напряжения. Для этого предлагается в каждый момент времени из общего числа фаз сети отыскивать две фазы для участия в процессе модуляции, мгновенные значения ЭДС в одной из которых превышают или равны, а в другой - не превышают или равны приведенному значению управляющего сигнала, и по достижении интегральной ошибки регулирования мгновенного значения ЭДС в одной из указанных фаз выключают работавший и одновременно включают очередной вентиль в этой фазе. Реализация предложенного способа возможна в двух вариантах, в зависимости от порядка выбора фаз сети, предназначенных для модуляции. Первый предполагает выбор одной фазы с наибольшим положительным значением ЭДС, а другой фазы - с наибольшим по модулю отрицательным значением ЭДС по сравнению с мгновенными значениями ЭДС всех других фаз сети. Второй предусматривает выбор двух фаз, мгновенные значения ЭДС которых минимально отличаются от значений приведенного управляющего сигнала в каждый момент времени.
На фиг. 1, а приведены диаграммы приведенного к сетевому входу управляющего сигнала uy *(t), интегральной ошибки регулирования Δu
Как следует из фиг. 1, а, известный способ управления соответствует асинхронному принципу управления вентилями, не требующему "привязки" углов управления к каким-либо характерным точкам синусоидального сетевого напряжения. Каждое включение вентиля на очередном интервале повторяемости происходит в момент равенства вольт-секундных площадей S1= S2, располагающихся между кривыми ed(t) и uy *(t) по обе стороны от приведенного управляющего сигнала. Указанные моменты фиксируются по достижении интегральной ошибки регулирования нулевого значения
В предположении постоянства в течение интервала повторяемости управляющих параметров uy1 *= uy2 *, α1 = α2, решение данного уравнения дает известное выражение регулировочной характеристики ВП
α = arccos(u
где  - максимальное среднее напряжение на выходе m-фазного преобразователя. Следовательно, данный способ управления реализует тот же закон модуляции, какой имеет место при обычном синхронном управлении ВП на однооперационных вентилях при наличии системы импульсно-фазового управления с "arccos" характеристикой. Как известно, недостатком данного управления является неполная управляемость, ограничивающая частотную полосу пропускания на уровне частоты питающей сети.
- максимальное среднее напряжение на выходе m-фазного преобразователя. Следовательно, данный способ управления реализует тот же закон модуляции, какой имеет место при обычном синхронном управлении ВП на однооперационных вентилях при наличии системы импульсно-фазового управления с "arccos" характеристикой. Как известно, недостатком данного управления является неполная управляемость, ограничивающая частотную полосу пропускания на уровне частоты питающей сети.
Для устранения указанного недостатка предлагается на каждом интервале повторяемости переключать вентили тех двух фаз сети, ЭДС в одной из которых имеет наибольшее положительное значение, удовлетворяющее условию e1≥uy *(t), а в другой - наибольшее по модулю отрицательное значение, удовлетворяющее условию e2≤uy *(t), по сравнению с ЭДС других фаз (см. фиг. 1, б). Переключение вентилей предлагается производить по достижении интегральной ошибки регулирования Δu
на участке уменьшения ошибки при ed(t)= e1(t)
и последующего ее возрастания при ed(t)= e2(t)
Осуществляя на основании Δu
подтверждающий, что переключение вентилей происходит при равенстве вольт-секундных площадей между кривыми ЭДС ed(t) и приведенного управляющего сигнала uy *(t).
Значительный перепад ЭДС ed(t) в моменты переключений ведет к нежелательному увеличению пульсаций тока. Для устранения и этого недостатка предлагается выбирать фазы сети для участия в процессе модуляции, мгновенные значения ЭДС в которых минимально отличаются от значений приведенного управляющего сигнала.
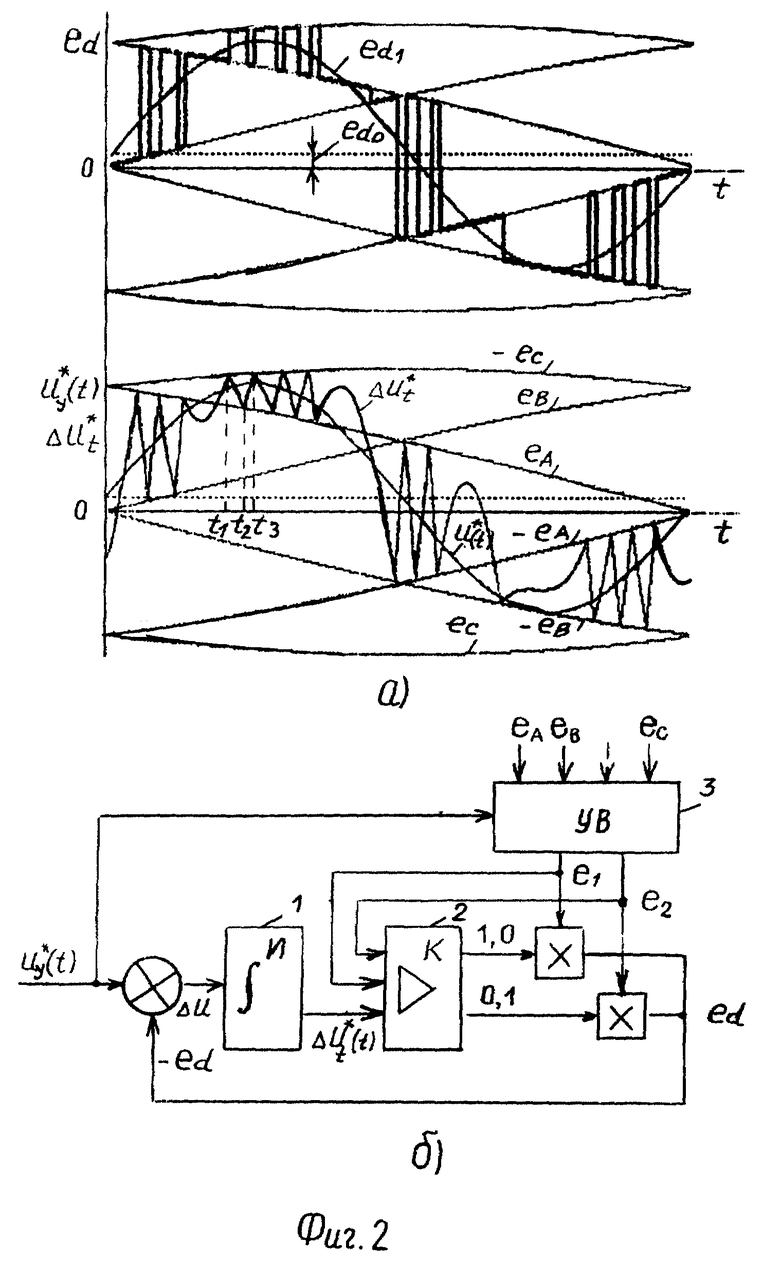
Диаграммы на фиг. 2, а, полученные методом компьютерного моделирования с помощью Pascal- программы, иллюстрируют эффективность данного способа управления при отработке управляющего сигнала, изменяющегося с частотой, в m= 6 раз превышающей частоту сети. Функциональная блок-схема модели приведена на фиг. 2, б. Данная релейная система содержит интегратор (И) 1 в канале ошибки регулирования, блок компараторов (К) 2, а также устройство выбора фазных напряжений (УВ) 3. С целью уменьшения глубины пульсаций УВ в каждый момент указывает на те фазы сети e1, e2, мгновенные напряжения в которых минимально отличаются от сигнала управления. Переключение вентилей происходит по достижении интегральной ошибки регулирования напряжения в одной из указанных фаз, после чего выходная координата принимает значение напряжения этой фазы сети до следующего переключения. Блок компараторов 2 выполняет функции релейного элемента, порог срабатывания которого определяется величинами указанных сетевых напряжений. Можно видеть, что в связи с переменными параметрами релейного элемента частота автоколебаний (переключений вентилей) на периоде управляющего сигнала, хотя и не остается постоянной, но изменяется в небольших пределах, зависящих от постоянной интегрирования Tu блока 1.
Следовательно, получение необходимой частоты переключений в релейной системе управления преобразователем может осуществляться путем соответствующего расчета и выбора указанного параметра.
Предлагаемый способ управления основывается на переключении двухоперационных вентилей преобразователя в моменты достижения интегральных отклонений выходной ЭДС от приведенного к сетевому входу управляющего сигнала установленного значения. Для получения частотной полосы пропускания, превышающей частоту питающей сети, то есть для достижения технического результата, предлагается указанные переключения вентилей производить по достижению интегральной ошибки регулирования напряжения в одной из двух фаз сети, участвующих в модуляции. В качестве последних предлагается выбирать фазы с наибольшими значениями ЭДС или фазы, мгновенные значения ЭДС которых минимально отличаются от приведенных значений управляющего сигнала. 2 з. п. ф-лы, 2 ил.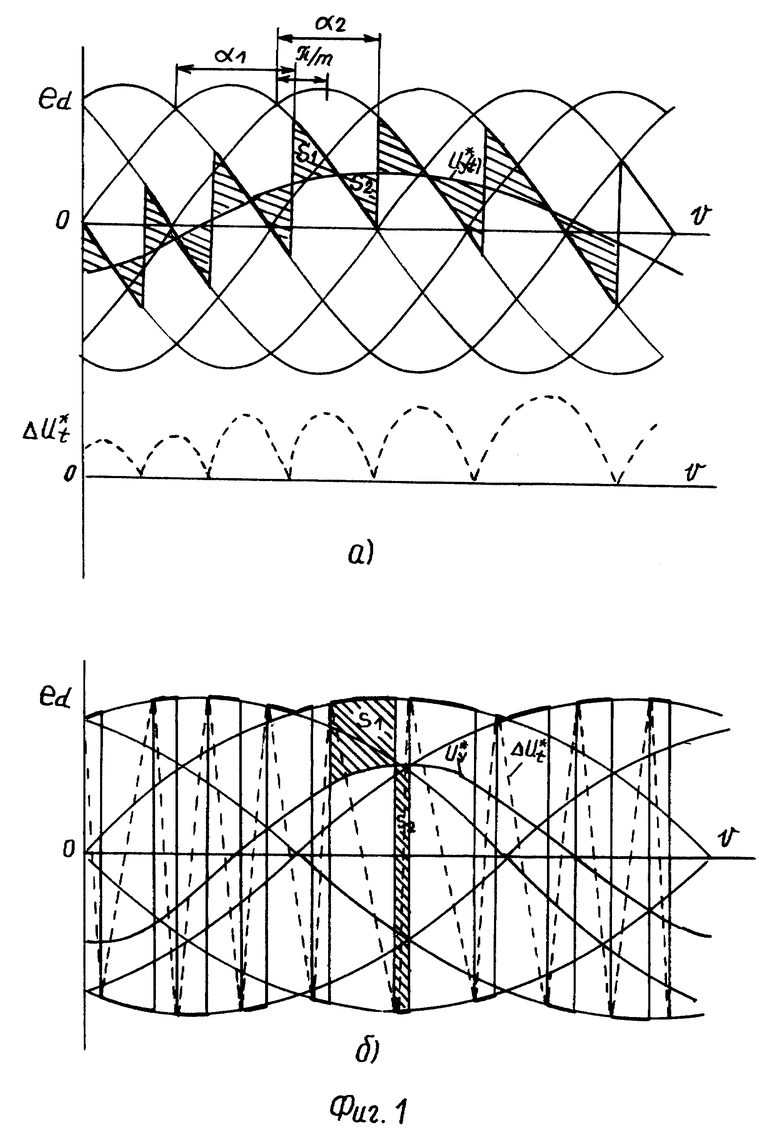
| ДЖЮДЖИ Л | |||
| и др | |||
| Силовые полупроводниковые преобразователи частоты | |||
| пер | |||
| с англ | |||
| - М.: Энергоатомиздат, 1983, с | |||
| Железнодорожный снегоочиститель на глубину до трех сажен | 1920 |
|
SU263A1 |
| ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1997 |
|
RU2124263C1 |
| Устройство для управления трехфазным мостовым полууправляемым преобразователем | 1983 |
|
SU1125727A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
