Изобретение относится к механизмам, изменяющим плавно, бесступенчато величины угловой скорости выходного звена.
Известен пластинчатый гидромотор двойного действия (Зайченко И.З., Мышлевский П. М. Пластинчатые насосы и гидромоторы. - М.: Машиностроение, 1970, с. 114, рис. 74), в котором ведущий вал несет на своей консоли сидящий на шлицах ротор с двенадцатью пластинами, скользящими в пазах ротора, находящегося внутри статора. Недостатком этого гидромотора является невозможность регулирования его скорости вращения.
Известен также гидромотор шестикратного действия (там же, с. 128, рис. 84), в котором в пазах ротора расположено двадцать пластин, контактирующих со сложной внутренней поверхностью статора. Недостатком такого гидромотора является невозможность его регулирования.
Близким техническим решением к изобретению является пластинчатый гидромотор двойного действия, срединный в одну гидравлическую схему с регулируемым насосом, трехпозиционным золотником с ручным управлением и предохранительным клапаном (там же, с. 128, рис. 136). Недостатком такой схемы является то, что регулирование скорости гидромотора осуществляется изменением скорости вращения насоса и то, что в гидромоторе нет возможности автоматически осуществлять изменение выходной моментной характеристики.
Целью изобретения является создание такого пластинчатого гидромотора любой кратности действия, в котором регулирование скорости вращения осуществляется за счет него самого с возможностью автоматического управления выходной моментной характеристикой.
Поставленная цель достигается тем, что предложен автоматический гидромотор, содержащий корпус, входной и выходной валы, отличающийся тем, что он снабжен двумя соосными роторами встречного вращения, внутренний ротор несет пластины в пазах и находится внутри наружного ротора, а наружный ротор располагается в корпусе на подшипниках качения, входной вал внутреннего ротора соединен посредством соединительной муфты с ведущим валом механизма регулирования величины момента инерции внутреннего ротора, выполненного в виде замкнутой дифференциальной передачи, на ведущем валу которого жестко установлено зубчатое колесо, три центральные колеса, из которых первое и второе установлены на ведущем валу свободно, третье - жестко, установленное на ведущем валу с возможностью фиксированного поворота первое водило, шарнирно установленные в нем на обшей оси и жестко связанные между собой два сателлита, предназначенные для зацепления соответственно с первым и вторым центральными колесами, замыкающие первое и третье центральные колеса и размещенные на промежуточном валу две шестерни, первая из которых предназначена для зацепления с зубчатым колесом, вторая - с первым центральным колесом, жестко связанное со ступицей второго центрального колеса второе водило, выполнено в виде барабана, состоящего из двух дисков и жестко связанных с ними двух осей, на последних шарнирно размещены предназначенные для зацепления с третьим центральным колесом две шестерни сателлита, на ступицах которых жестко закреплены грузы, ступица первого водила установлена в корпусе посредством подшипников качения и жестко связана гайкой шариковинтового механизма, в котором вин расположен соосно с входным валом и связан с помощью подшипников качения с ползуном центробежного регулятора осевого действия, образующим шарнир с двумя шатунами, соединенными жестко с двумя грызунами и шарнирно с двумя коромыслами, образующими шарниры с наружным ротором, жестко связанным со шкивом и выходным валом гидромотора, а передаточное отношение от зубчатого колеса до второго центрального колеса при остановленном первом водиле дифференциального механизма регулирования момента инерции внутреннего рота выбрано равным единице.
На чертеже показана кинематическая схема всего гидромотора. Он содержит внутренний ротор 1 гидромотора с входным валом 2, соединенным муфтой 3 с ведущим валом 4 механизма регулирования величины момента инерции внутреннего ротора. На этом валу жестко закреплено колесо 5, входящее в зацепление с шестерней 6, сидящей на одном и том же промежуточном валу с шестерней 7, входящей в зацепление с первым центральным колесом 8, сидящим свободно на валу 4 и зацепляющимся с колесом 9 сателлита, на валу 10 которого закреплена шестерня 11. Вал 10 шарнирно закреплен на первом водиле 12, которое сидит свободно на ведущем валу с возможностью фиксированного поворота. Шестерня 11 входит в зацепление с вторым центральным колесом 13, сидящим на одной ступице с вторым водилом 14, выполненным в виде двух дисков 14 и 20 грузового барабана, в котором закреплены одним концом оси 15, на которых шарнирно сидят ступицы 16 и 17 шестерен-сателлитов, с которыми связаны грузы 18 и 19. Оси 15 закреплены вторыми конами в диске 20. Сателлиты 16 и 17 входят в зацепление с третьим центральным колесом 21, жестко связанным с ведущим валом 4. Наружный ротор гидромотора покоится в подшипниках качения 23 в неподвижном корпуса трансформатора и имеет выходной вал 24. Наружный ротор 22 снабжен шкивом 25, масса которого сосредоточена в его ободе. Наружный ротор 11 имеет продолженную ступицу с поперечиной 26 центробежного регулятора осевого типа, с которой шарнирно связаны два коромысла 27 жестко прикрепленными к ним грузами 28, при этом коромысла 27 образуют шарниры с двумя шатунами, связанными шарнирно с ползуном 29, сопрягающимся с помощью подшипников качения с винтом 30 шариковинтового механизма, в котором гайка 31 жестко соединена со ступицей 32 первого водила 12 и связана с помощью подшипникового качения с корпусом гидромотора.
Звенья 5 - 15 образуют механизм регулирования величины радиуса вращения грузов, в котором звенья 8 - 13 составляют его дифференциальный механизм с двумя степенями свободы, из которых одна принадлежит первому водилу 12.
Звенья 14 - 17 образуют дифференциальный механизм грузового барабана с двумя степенями свободы.
Дифференциальный механизм регулирования радиуса вращения грузов 8 - 13 и дифференциальный механизм грузового барабана 14 - 17 образуют последовательное соединение, так как второе центральное колесо 13 сидит на одной ступице с вторым водилом 14. Кроме того, в этом последовательном соединении первое центральное колесо 8 и третье центральное колесо 21 замкнуты зубчатыми колесами 5 - 7.
В целом образовался замкнутый дифференциальный механизм регулирования величины момента инерции внутреннего ротора, составленный из звеньев 5 - 17 и 21 и имеющий две степени свободы. Одну степень свободы осуществляет ведущий вал 4, а вторую - водило 12. Если сделать неподвижным водило 12, то дифференциальный механизм замкнутого типа 5 - 13 превращается в обыкновенную зубчатую передачу с неподвижными осями и передаточным отношением, равным единице, т.ею. U5-13 = 1.
Автоматический пластинчатый гидромотор работает следующим образом. При вращении внутреннего ротора 1 гидромотора относительно наружного ротора 22 вращение передается валом 2 и муфтой 3 на ведущий вал механизма регулирования величины момента инерции внутреннего ротора гидромотора, на котором закреплены зубчатое колесо 5 и третье центральное колесо 21. При неподвижном первом водиле 12 колесо 5 приводит ряд колес 6 - 13 и, следовательно, второе водило 14 с осями 15 и ступицами шестерен-сателлитов 16 и 17 грузового барабан, который вращается вокруг центральной оси гидромотора. При неподвижном первом водиле 12 второе водило 14 и третье центральное колесо 21 имеют одинаковую угловую скорость, звенья 14 и 21 дифференциального грузового барабана вращаются как одно целое, и грузы 18 и 19 имеют постоянные радиусы вращения относительно центральной оси гидромотора. При перемещении на ходу первого водила 12 механизм 8-13 превращается в дифференциальный и угловая скорость второго водила 14 изменяется. Она не будет равна угловой скорости третьего центрального колеса 21. В этом случае шестерни-сателлиты 16 и 17 поворачивают грузы 18 и 19 вокруг своих осей, радиуса их вращения вокруг центральной оси изменяются и, следовательно, изменяется момент инерции внутреннего ротора 1 относительно центральной оси. Таким образом, при неподвижном первом колесе 12 и при постоянной массе грузов 18 и 19 момент инерции этих грузов относительно оси постоянен. При вращении водила 12 на ходу вручную или от какого-либо механизма с возможностью его фиксации радиус вращения грузов изменяется и, следовательно, момент инерции грузов также изменяется. Когда грузы станут в положение, при котором их центры масс окажутся на центральной оси, радиус вращения будет равен нулю и момент инерции грузов будет минимальным. Если при движении водила 12 грузы разворачиваются так, что они лежат в одной плоскости, т.е. когда они повернуты на угол 180o относительно положения, при котором радиус равен нулю, то их радиус вращения будет максимальным, момент инерции грузов относительно центральной оси также будет максимальным.
Таким образом, в конструкции использован гидромотор, в котором нет неподвижного статора.
Гидромотор является двухсторонним, т.е. в предлагаемой конструкции используется взаимодействие двух роторов при отсутствии вообще неподвижного статора. Внутренний ротор вращается на подшипниках качения относительно наружного ротора и вместе с ним, также на подшипниках качения относительно неподвижного корпуса.
Входной вал 2 внутреннего ротора приводит в движение вспомогательную кинематическую цепь - механизм регулирования моментов инерции ротора, т.е. эта цепь предназначена для изменения параметров самого внутреннего ротора и, следовательно, замыкается на нем самом. Других кинематических цепей, имеющих самостоятельное значение, в гидромоторе нет. Наружный ротор имеет только входной вал.
Принцип работы автоматического гидромотора заключается в следующем. Внутренний ротор 1 имеет относительное вращательное движение относительно наружного ротора с угловой скоростью ω1,22= ωдв , где ωдв - номинальная угловая скорость внутреннего ротора относительно наружного ротора в том случае, когда наружный ротор становится неподвижным, т.е. если он становится неподвижным статором. Вращательное движение наружного ротора 22 относительно неподвижного корпуса, т.е. его абсолютное движение, если переносное движение для внутреннего ротора 1 с угловой скоростью ω22 . Тогда абсолютное движение внутреннего ротор 1 осуществляется с угловой скоростью
Так как все силы перпендикулярны центральной оси вращения, то сумма моментов всех внешних сил относительно этой оси равна нулю и имеет место случай сохранения главного момента количеств движения системы относительно центральной оси. Обозначим через Jпр2 = const момент инерции наружного ротора без дополнительной массы относительно центральной оси; через Jш = const момент инерции дополнительной массы - шкива 25 относительно центральной оси; через Jц = const момент инерции муфты (звенья 26 - 29) относительно центральной оси; через Jпр1 = const момент инерции относительно центральной оси всех вращающихся частей 5 - 11, 13 - 17, 20 - 21; через J18-19 ≠const момент инерции грузов 18 и 19 относительно центральной оси.
Тогда для указанного случая имеем уравнение:
(Iпр1+I18,19)•(ωдв+ ω22)+(Iпр2+Iц+Iщ)•ω22=0
Обозначим через J2 = Jпр2 + Jц + Jш = const.
Тогда угловая скорость ротора и выходного вала равна
Передаточное отношение получим в виде:
Если момент инерции груза массы m и радиуса r относительно оси C-C, проходящей через его центр масс, равен
Jc = m•r2/2,
то его же момент инерции относительно центральной оси равен: ,
,
где
R1 - действительный радиус вращения центров масс C относительно центральной оси грузов механизма регулирования величин моментов инерции внутреннего ротора. Если обозначить через J1 = Jпр1 + 2JC1, то получим для передаточного отношения :
Пусть, например, заданы следующие моменты инерции при принятых обозначениях: J1 = 0,5 ед; m•mR
Откуда
Пусть задано: mR
Таким образом, в рассматриваемом случае передаточное отношение может плавно изменяться в пределах U = -(1,97 - 41). Знак минус показывает, что наружный ротор вместе с внутренним ротором будет вращаться в сторону, противоположную вращению внутреннего ротора.
Величина передаточного отношения гидромотора зависит от соотношения величин моментов инерции относительно центральной оси грузов барабана механизма регулирования величин моментов инерции внутреннего ротора, а процесс плавного регулирования этой величины осуществляется плавным же перемещением первого водила 12 механизма регулирования.
Автоматическое регулирование числа оборотов выходного вала осуществляется следующим образом. При увеличении или уменьшении момента сопротивления на выходном валу 24 угловая скорость наружного ротора (звенья 22, 25 и 26) соответственно уменьшается или увеличивается, что приводит к уменьшению или увеличению центробежной силы инерции грузов 28 и перемещению винта 30 вправо или влево. Тогда гайка 31 поворачивает водило 12 в ту или иную сторону, механизм 5 - 13 становится дифференциальным, угловые скорости звеньев 14 и 21 становятся не равными друг другу, а грузы 18 и 19 поворачиваются на своих осях также в ту или иную сторону, уменьшая или увеличивая радиус вращения R
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ШАШКИНА С РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ | 1996 |
|
RU2115808C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ШАШКИНА С АВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ | 1996 |
|
RU2116461C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820104A1 |
| Инерционный трансформатор вращающего момента | 1989 |
|
SU1824506A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| Зубчато-рычажный кулисный механизм | 1980 |
|
SU905547A1 |
| Станок для нарезания резьб | 1987 |
|
SU1484496A1 |
| Привод перемещения рабочей клети стана холодной прокатки труб | 1980 |
|
SU956081A1 |
Изобретение предназначено для использования в гидроэнергомашиностроении. Гидромотор снабжен двумя соосными роторами встречного вращения, один из которых расположен внутри другого, механизмом регулирования величины момента инерции внутреннего ротора, включающим ведущий вал, соединенный посредством муфты с входным валом, и выполненным в виде замкнутой дифференциальной передачи с зубчатыми колесами, шестернями и сателлитами, двумя водилами. Механизм имеет барабан с грузами, радиус вращения которых изменяется плавно. Имеется шариковинтовой механизм, винт которого соединен с центробежным регулятором осевого типа, поперечина которого жестко связана с наружным ротором гидромотора, несущим выходной вал. 1 ил.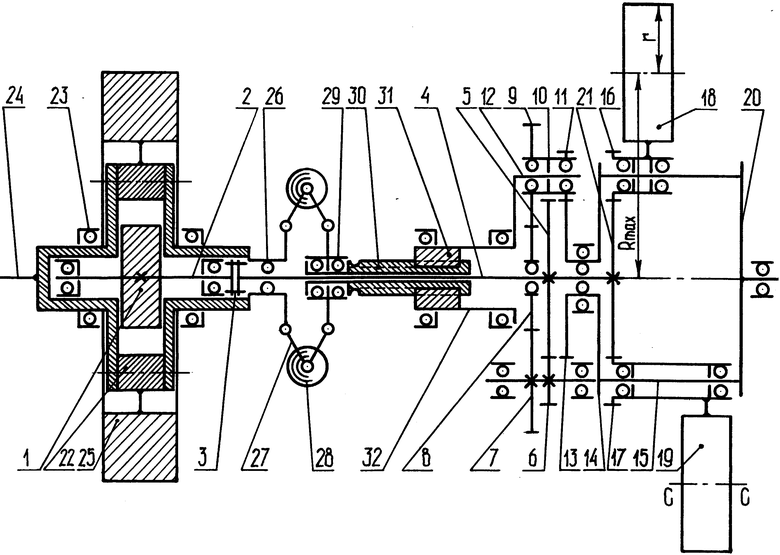
Автоматический пластинчатый гидромотор с регулированием скорости вращения при любой кратности действия, содержащий корпус, входной и выходной валы, отличающийся тем, что он снабжен двумя соосными роторами встречного вращения, внутренний ротор несет пластины в пазах и находится внутри наружного ротора, а наружный ротор располагается в корпусе на подшипниках качения, входной вал внутреннего ротора соединен посредством соединительной муфты с ведущим валом механизма регулирования величины момента инерции внутреннего ротора, выполненного в виде замкнутой дифференциальной передачи, на ведущем валу которой жестко установлено зубчатое колесо, три центральные колеса, из которых первое и второе установлены на ведущем валу свободно, третье - жестко, установленное на ведущем валу с возможностью фиксированного поворота первое водило, шарнирно установленные в нем на общей оси и жестко связанные между собой два сателлита, предназначенные для зацепления соответственно с первым и вторым центральными колесами, замыкающие первое и третье центральные колеса и размещенные на промежуточном валу две шестерни, первая из которых предназначена для зацепления с зубчатым колесом, вторая - с первым центральным колесом, жестко связанное со ступицей второго центрального колеса второе водило, выполненное в виде барабана, состоящего из двух дисков и жестко связанных с ними двух осей, на последних шарнирно размещены предназначенные для зацепления с третьим центральным колесом две шестерни сателлита, на ступицах которых жестко закреплены грузы, ступица первого водила установлена в корпусе посредством подшипников качения и жестко связана с гайкой шариковинтового механизма, в котором винт расположен соосно с входным валом и связан с помощью подшипников качения с ползуном центробежного регулятора осевого действия, образующим шарнир с двумя шатунами, соединенными жестко с двумя грузами и шарнирно - с двумя коромыслами, образующими шарниры с наружным ротором, жестко связанным со шкивом и выходным валом гидромотора, а передаточное отношение от зубчатого колеса до второго центрального колеса при остановленном первом водиле дифференциального механизма регулирования момента инерции внутреннего ротора выбрано равным единице.
| Зайченко И.З., Мышлевский П.М | |||
| Пластинчатые насосы и гидромоторы | |||
| - М.: Машиностроение, 1970, с.114, рис.74. |
