Изобретение относится к оружию, а более конкретно к управлению наводкой орудий, и может быть использовано в системах наведения пушечного вооружения.
Известен способ наводки орудия, включающий определение координат цели по месту, азимуту и дальности, решение уравнений точки встречи снаряда с целью методом последовательных приближений относительно угловых перемещений цели, вычисление поправок, непрерывную наводку орудия на цель [1, с. 142 - 145]. Хотя реализация этого способа возможна при сравнительно низкой стоимости аппаратных средств, точное определение координат точки встречи по угловым перемещениям цели возможна лишь на дальностях до цели, не превышающих 1,5 км, так как на небольших дальностях из-за малой кривизны траектории полета снаряда наибольшую роль в наводке орудия играют угловые перемещения цели, а не смещения вдоль линии визирования [1, с. 142 - 143]. Таким образом, данный способ наводки имеет ограниченную по дальности область применения.
Известно устройство для наводки орудия, реализующее описанный выше способ [2] . Устройство содержит сенсорный блок с двумя двуосными динамически настроенными нежидкостными гироскопами и тремя одноосными акселерометрами, измеряющий координаты цели при движении танка. Сенсорный блок связан с двумя вычислительными устройствами, служащими для определения позиции носителя оружия и баллистических данных, а также для подготовки и расчета на основе результатов измерений управляющих величин, необходимых для первичной стабилизации прицела и прибора наблюдения и вторичной стабилизации оружия. Хотя введение вторичной стабилизации позволяет повысить точность стрельбы, использование акселерометров и двух вычислительных устройств ведет к усложнению аппаратных средств и увеличению стоимости системы наведения.
Наиболее близким к предлагаемому техническому решению является способ прямого решения задачи встречи снаряда с целью [3, с. 200]. Способ включает последовательные операции по замеру сигналов сопровождения цели по месту, азимуту и дальности, прогнозированию координат точки встречи снаряда с целью, определению сигналов компенсации на изменение начальной скорости снаряда (ΔUo), отклонение плотности воздуха от нормальной (ΔП) , баллистический ветер (ΔW), а также моделирование баллистики снаряда системой трех уравнений баллистики, выработку сигналов наведения и отработку их приводами. Баллистика снаряда моделируется тремя линейными уравнениями типа Z = A1 + B1 • Ду [3, с. 218], где Z - баллистический параметр; A1 и B1 - постоянные величины; Ду - упрежденная наклонная дальность (дальность точки встречи). Система трех уравнений баллистики имеет следующий вид: ,
,
где
Δε, Δβ - баллистические поправки на полет снаряда до точки встречи по месту и азимуту соответственно, рад.;
τ - время полета снаряда до точки встречи, рад.;
Ду - упрежденная наклонная дальность (дальность точки встречи), м.;
A1, A2, A3, B1, B2, B3 - постоянные баллистические величины (баллистические коэффициенты).
Моделирование баллистики снаряда системой трех линейных уравнений во всем диапазоне дальностей стрельбы характеризуется большими ошибками в определении полетного времени снаряда и баллистических поправок на полет снаряда по углу места и азимуту на дальности точки встречи более 1,5 км. На фиг. 1 изображена реальная, экспериментально полученная баллистическая кривая отклонения снаряда вертикальной плоскости в зависимости от дальности точки встречи (кривая 1) и кривая, вычисленная по системе уравнений баллистики (1) (кривая 2). Из графиков видно, что на больших дальностях точки встречи (более 1,5 км) баллистическая поправка на полет снаряда по углу места моделируется с большими погрешностями. Аналогичная картина имеет место для бокового отклонения снаряда в полете (деривации) и для времени полета снаряда до точки встречи.
Известно устройство, реализующее описанный выше способ [3, с. 12-14, 221] , которое является прототипом предлагаемого устройства. Данное устройство содержит последовательно соединенные систему сопровождения цели, блок прогнозирования координат точки встречи, поправочный блок, а также баллистический блок, первый и второй сумматоры, выходы которых подключены к приводам вертикального и горизонтального наведения орудия, их первые входы подключены соответственно к первому и второму выходам поправочного блока, а вторые входы - к первому и второму выходам баллистического блока, третий сумматор. Блок прогнозирования координат точки встречи, поправочный и баллистический блоки и три сумматора составляют в совокупности счетно-решающий прибор.
Несмотря на достаточно простую реализацию, данное устройство, как показывают результаты исследований (фиг. 1, кривая 2), не обеспечивает высокую точность стрельбы на дальностях точки встречи более 1,5 км. Это происходит из-за того, что на дальностях более 1,5 км баллистический блок, реализующий систему уравнений баллистики (1), воспроизводит баллистику снаряда с низкой точностью. Неточное вычисление полетного времени снаряда приводит к ошибкам в прогнозировании координат точки встречи и к снижению точности наводки орудия.
Цель изобретения - повышение точности стрельбы на дальности от 1,5 км до максимальной дальности, определяемой баллистикой конкретного снаряда, путем более точного моделирования баллистики снаряда в этом диапазоне дальностей, при этом обеспечивается незначительное увеличение стоимости аппаратных средств по сравнению с прототипом.
Эта цель достигается тем, что в известном способе наводки, включающем последовательные операции по замеру сигналов сопровождения цели по месту, азимуту и дальности, прогнозированию координат точки встречи снаряда с целью, определению сигналов компенсации на изменение начальной скорости снаряда (ΔUo) , отклонение плотности воздуха от нормальной (ΔП) , баллистический ветер (ΔW) , а также моделирование баллистики снаряда, выработку сигналов наведения и отработку их приводами, весь диапазон дальности точки встречи разбивают на N интервалов. Каждому интервалу ставят в соответствие свою систему трех уравнений баллистики. Прогнозирование координат точки встречи осуществляют для номинальных условий. Определение сигналов компенсации по месту, азимуту и дальности производят для текущих условий стрельбы. Сигнал текущей дальности точки встречи (Дтв) определяют путем суммирования сигнала прогнозируемой дальности точки встречи (Дтв *) и сигнала компенсации по дальности (Дтв. к.). Перед моделированием баллистики снаряда определяют интервал, в который попадает сигнал текущей дальности точки встречи. Баллистику снаряда на этом интервале моделируют соответствующей системой 3-х уравнений. Выработку сигналов наведения производят путем суммирования сигналов, соответствующим углам прогнозирования точки встречи, сигналов компенсации и сигналов моделирования баллистики.
Высокую точность предлагаемого способа обусловливает наличие ряда систем для моделирования баллистики снаряда, каждая из которых характеризует полет снаряда до точки встречи с высокой точностью на определенном интервале дальностей точки встречи. Интервалы дальностей в зависимости от требуемой точности выбираются равными не менее 200 м и не более 1000 м. Нижний и верхний пределы интервала обусловлены точностью наводки и стоимостью аппаратных средств. Для повышения точности интервалы следует уменьшать, однако при этом увеличивается ряд систем уравнений и, как следствие, усложняются аппаратные средства для его реализации. Как показывают эксперименты, для повышения точности стрельбы на дальностях, например, до 4 км, достаточно разбить весь диапазон дальностей на 8 - 10 интервалов.
Выбор соответствующей системы трех уравнений баллистики определяет сигнал текущей дальности точки встречи, причем для достижения высокой точности выработки сигналов наведения, этот сигнал определяют последовательно; сначала путем прогнозирования координат точки встречи при номинальных условиях, а затем вырабатывают сигналы компенсации по дальности точки встречи для текущих условий стрельбы.
Каждая система уравнений ряда, моделирующая баллистику снаряда, состоит, например, из трех линейных уравнений: ,
,
где
Δε, Δβ - баллистические поправки на полет снаряда до точки встречи по месту и азимуту соответственно;
τ - время полета снаряда до точки встречи;
Дтв - дальность точки встречи;
a1i, b1i, a2i, b2i, a3i, b3i - баллистические коэффициенты i-й системы ряда (i = 1, 2,...N);
N - общее число систем уравнений баллистики (число интервалов дальности точки встречи Дтв).
Моделирование баллистики снаряда на каждом интервале дальностей точки встречи своей системой уравнений позволяет с высокой точностью воспроизвести баллистику снаряда на интервалах и, как следствие, во всем диапазоне дальностей (фиг. 1, кривая 3).
Для реализации предлагаемого способа в известном устройстве для наводки орудия, содержащем последовательно соединенные систему сопровождения цели, блок прогнозирования координат точки встречи снаряда с целью, поправочный блок, а также баллистический блок, первый и второй сумматоры, выходы которых подключены к приводам вертикального и горизонтального наведения, первые входы сумматоров подключены соответственно к первому и второму выходам поправочного блока, вторые входы - к первому и второму выходам баллистического блока, а третьи входы - к первому и второму выходам блока прогнозирования координат точки встречи, третий сумматор, баллистический блок выполнен в виде набора пакетов, каждый из которых содержит три функциональных устройства и реализует одну из N систем уравнений баллистики (2). Первый, второй и третий выходы этих устройств соединены соответственно с первым, вторым и третьим выходами баллистического блока. На входе в пакеты установлены логические устройства, настроенные на определенные диапазоны дальности точки встречи. В работе участвует то логическое устройство, в чей диапазон попадает текущая дальность точки встречи. Число логических устройств и пакетов соответствует числу интервалов по дальности точки встречи. Третий выход блока прогнозирования координат точки встречи соединен с первым входом поправочного блока и с вторым входом третьего сумматора, первый вход которого соединен с третьим выходом поправочного блока. Предлагаемое устройство дает возможность при незначительной стоимости аппаратных средств значительно повысить точность стрельбы на дальностях, превышающих 1,5 км.
Каждое логическое устройство баллистического блока выполнено в виде компаратора, выход которого через шифратор приоритетов параллельно подключен к логическим входам трех мультиплексоров. Первые входы компараторов подключены к входу баллистического блока, а вторые входы - к соответствующим источникам опорных напряжений (Uon. i). Функциональные устройства пакетов баллистического блока выполнены в виде операционных усилителей, причем каждое функциональное устройство состоит из одного усилителя. Первые входы операционных усилителей подключены к входу баллистического блока, а вторые входы - к соответствующим источникам постоянных напряжений (Ua1i), выход первого усилителя i-го пакета подключен к i-му информационному входу первого мультиплексора, выход второго усилителя i-го пакета подключен к i-му информационному входу второго мультиплексора, выход третьего усилителя i-го пакета - к i-му информационному входу третьего мультиплексора. Входные сопротивления операционных усилителей выполнены по соотношениям:
Rос1i/Ra1i=a1i;
Rос1i/Rb1i=b1i;
где
Rос - сопротивление обратной связи;
Ra1i, Rb1i - входные суммирующие сопротивления;
i - номер пакета функциональных устройств, соответствующий i-й системе уравнений баллистики, или i-му интервалу дальностей точки встречи (i = 1, 2, ...,N).
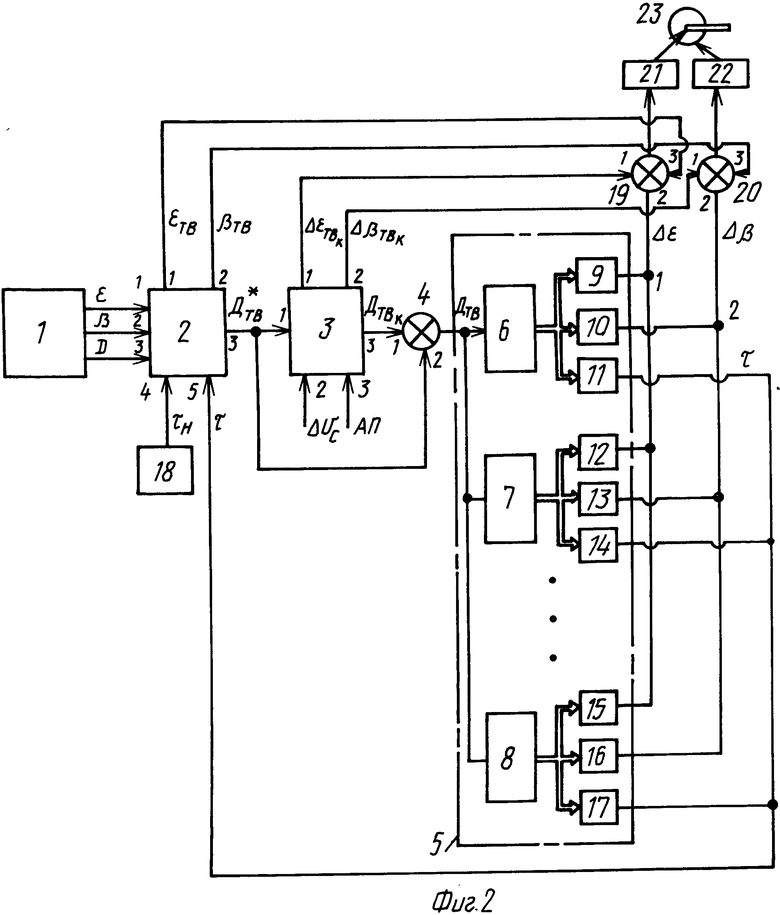
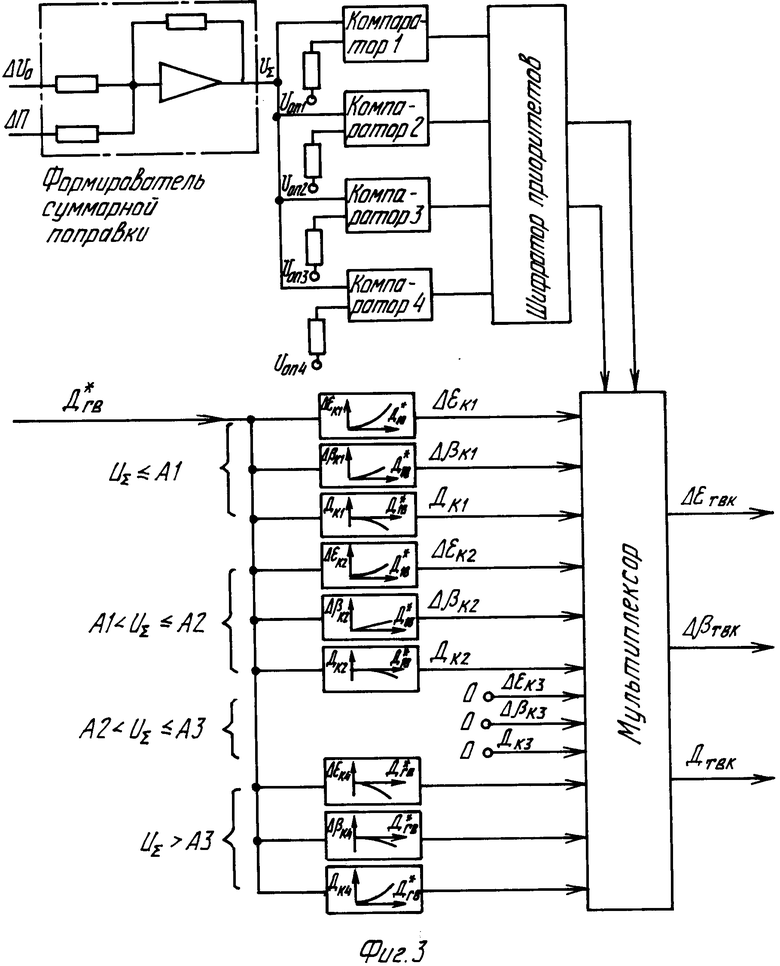
На фиг. 1 приведена диаграмма баллистических поправок на полет снаряда по углу места; на фиг. 2 - схема устройства для наводки орудия; на фиг. 3 и 4 - схемы реализации поправочного блока и баллистического блока соответственно.
Работу предлагаемого способа наводки поясняют фиг. 1 и 2.
Пример. Пусть максимально возможная дальность стрельбы составляет 4 км м весь диапазон дальностей точки встречи разбит на 8 интервалов по 500 м каждый (фиг. 1, кривая 3). Каждому интервалу ставится в соответствие своя система трех уравнений баллистики. Для рассматриваемого примера таких систем будет 8. После замера сигналов сопровождения цели по месту, азимуту и дальности производят прогнозирование координат точки встречи осуществляют для номинальных условий. Номинальными считают следующие условия окружающей среды: температура воздуха (Тв) 15oC, атмосферное давление (Pатм) 750 мм рт. ст., баллистический ветер W = 0. Затем определяют сигналы компенсации по месту, азимуту и дальности для текущих условий стрельбы. Сигнал текущей дальности точки встречи (Дтв) определяют путем суммирования сигнала прогнозируемой дальности точки встречи (Дтв *) и сигнала компенсации по дальности (Дтв.к). Перед моделированием баллистики снаряда определяют интервал, в который попадает сигнал текущей дальности точки встречи. Предположим, что текущая дальность точки встречи (Дтв) для обстреливаемой цели составляет 3200 м, т. е. попадает в седьмой интервал дальностей (фиг. 1). Тогда моделирование баллистики снаряда будет проводиться по седьмой системе уравнений. Выработку сигналов наведения производят путем суммирования сигналов, соответствующим углам прогнозирования точки встречи, сигналов компенсации и сигналов моделирования баллистики. Сигналы наведения подают на приводы вертикального и горизонтального наведения соответственно, а приводы разворачивают орудие.
Предлагаемое устройство (фиг. 2) содержит последовательно соединенные систему сопровождения цели 1, блок прогнозирования координат точки встречи снаряда с целью 2, поправочный блок 3. Первый вход сумматора 4 связан с третьим выходом поправочного блока 3, а второй вход - с третьим выходом блока прогнозирования 2. Выход сумматора 4 соединен с баллистическим блоком 5, который состоит из N логических устройств 6, 7, ..., 8 и пакетов, а также 3N функциональных блоков 9, 10, 11, 12, 13, 14,..., 15, 16, 17, где N - число интервалов разбиения по дальности точки встречи. Таким образом, каждый пакет состоит из трех функциональных блоков (первый пакет содержит 9, 10, 11 функциональные блоки, второй - 12, 13, 14 и т. д.). Каждое функциональное устройство имеет один выход, соединенный соответственно с первым, вторым и третьим выходами баллистического блока 5. Кроме этого, устройство содержит блок задания начальных условий 18, выход которого связан с четвертым входом блока прогнозирования 2, сумматоры 19 и 20. Первые входы этих сумматоров подключены соответственно к первому и второму выходам поправочного блока, вторые входы - к первому и второму выходам баллистического блока, а третьи выходы - к первому и второму выходам блока прогнозирования координат точки встречи 2. Третий выход баллистического блока 5 связан с пятым входом блока прогнозирования. Выходы сумматоров 19 и 20 подключены к приводам вертикального и горизонтального наведения соответственно, которые управляют наводкой орудия 23.
Устройство для наводки орудия работает следующим образом.
Система сопровождения цели 1 замеряет угол места цели (ε), азимут цели (β), дальность до цели (Д) и передает их соответственно на первый, второй, третий входы блока прогнозирования координат точки встречи 2. На четвертый вход этого блока поступает сигнал с блока задания начальных условий 18, задающий начальное значение полетного времени снаряда (τн). Это необходимо для определения координат точки встречи снаряда с целью в первый момент времени, когда еще не вычислено текущее время полета снаряда до точки встречи (τ).
В блоке прогнозирования 2 на основании текущих координат цели рассчитывается радиальная скорость цели (Up), угловые скорости цели в вертикальной и горизонтальной плоскостях (Wвп, Wгп) и определяют координаты точки встречи снаряда с целью (εтв, βтв, Дтв). Углы точки встречи в вертикальной (εтв) и горизонтальной (βтв) плоскостях подаются соответственно на третьи входы сумматоров 19 и 20, а дальность точки встречи поступает на вход поправочного блока 3. В этом блоке формируются сигналы компенсации (поправки) по координатам точки встречи на изменение начальной скорости снаряда (ΔUo) и отклонение плотности воздуха от нормальной (ΔП). Далее сигналы компенсации по углам точки встречи (Δεтв.к, Δβтв.к) поступают на первые входы сумматоров 19 и 20 соответственно. Сигнал компенсации по дальности точки встречи (Дтв.к) суммируется в сумматоре 4 с сигналом прогнозируемой дальности (Дтв *). Полученный сигнал текущей дальности точки встречи (Дтв) поступает на вход баллистического блока 5, моделирующего баллистику снаряда, а, в частности, на логические устройства 6, 7,...,8, каждое из которых настроено на определенный интервал дальности точки встречи. Далее сигнал дальности точки встречи подается на входы функциональных блоков, соответствующих данному интервалу.
Допустим, что сигнал текущей дальности точки встречи (для рассматриваемого примера Дтв = 3200 м) попадает в интервал логического устройства 7 (3000 - 3500 м). Тогда в работе баллистического блока 5 будет участвовать пакет, содержащий функциональные устройства 12, 13, 14. Устройство 12 определяет баллистическую поправку на полет снаряда в вертикальной плоскости (Δε), устройство 13 - баллистическую поправку на полет снаряда в горизонтальной плоскости (Δβ), а устройство 14 - текущее время полета снаряда до точки встречи (τ). Если сигнал дальности точки встречи попадает в интервал логического устройства 6, то в работе будут участвовать функциональные блоки 9, 10, 11 и т. д.
Сигналы с выхода каждого из функциональных блоков поступают соответственно на первый, второй и третий выходы баллистического блока 5. После этого баллистическая поправка по вертикали подается на второй вход сумматора 19, а деривация - на второй вход сумматора 20. На основании данных, получаемых с блока прогнозирования координат точки встречи 2, поправочного блока 3 и баллистического блока 5 сумматор 19 формирует вертикальный угол наведения орудия на точку встречи, а сумматор 20 - горизонтальный угол наведения. Эти сигналы поступают соответственно на приводы вертикального и горизонтального наведения 21 и 22, которые производят наводку орудия 23. Вычисленное текущее полетное время снаряда (τ) подается на пятый вход блока прогнозирования координат точки встречи 2, после чего рассмотренный выше процесс повторяется.
Для реализации предлагаемого устройства используются следующие известные блоки и функциональные элементы.
Система сопровождения цели 1 реализуется, например, в виде телевизионно-оптического визира [4, с. 179 - 184].
Блок прогнозирования координат точки встречи 2 реализуется трехканальным (по углу места, азимуту и дальности) и в каждом из каналов в соответствии с описанием прототипа [3, с. 221] содержит дифференцирующий блок, множительный блок и сумматор.
Блок задания начальных условий 18 по времени полета снаряда до точки встречи (τн) реализуется, например, в виде делителя напряжений с коммутатором выхода.
Поправочный блок 3 может быть реализован по схеме, изображенной на фиг. 3. Имеется формирователь единой суммарной поправки, два входа которого соединены с вторым (ΔUo) и третьим (ΔП) входами поправочного блока, а выход подключен к набору компараторов напряжений. Формирователь реализуется в виде операционного усилителя с двумя входами (например, микросхема К140УД6). Каждый из компараторов (например, микросхема К521СА3) настроен на определенную величину суммарного воздействия. Выходы компараторов через шифратор приоритетов (например, микросхема К533ИВ1) подключены к логическим управляющим входам мультиплексора, выполненного в виде двух микросхем (например, микросхемы К590КН3). Первый вход поправочного блока соединен с входами ряда блоков нелинейности. Блоки нелинейностей выполняются в виде нелинейных операционных элементов [5, с. 50 - 56]. Используются блоки нелинейностей трех видов. Блоки первого вида вырабатывают сигналы компенсации суммарного воздействия текущих условий стрельбы на вертикальный угол наведения. Выходы блоков нелинейностей первого вида через мультиплексор подключены к первому выходу поправочного блока. Второй вид блоков нелинейностей вырабатывает сигналы компенсации к горизонтальному углу наведения. Выходы этих блоков через мультиплексор подключены к второму выходу поправочного блока. Третий вид блоков нелинейностей вырабатывает сигналы компенсации на изменение дальности полета снаряда до точки встречи в зависимости от суммарного воздействия. Выходы этих блоков через мультиплексор подключены к третьему выходу поправочного блока.
Блоки нелинейностей реализуют функциональные зависимости сигналов компенсации (поправок по углам наведения и дальности точки встречи) от сигнала текущей дальности точки встречи.
Блоки нелинейностей каждого вида отличаются друг от друга величиной суммарной поправки (UΣ) , на которую они настроены. В нашем случае диапазоны изменения величины суммарной поправки имеют следующие граничные значения: A1 = 6%, A2 = 2%, A3 = 2%. Выбор того или иного блока нелинейностей из ряда производится срабатыванием соответствующих компараторов и подключением в мультиплексоре выхода этого блока к выходу поправочного блока. Для этого логические входы мультиплексоров подключены к выходам шифратора приоритетов.
Работа поправочного блока 3 приведена [3, с. 220 - 221].
Баллистический блок 5 может быть реализован в виде, представленном на фиг. 4. Выход сумматора 4 соединен с первыми входами N компараторов (в рассматриваемом примере N = 8) и с первыми входами функциональных устройств, моделирующих полет снаряда по зависимостям (2). Компараторы (например, микросхема К521СА3) предназначены для выбора одного из пакетов функциональных устройств, каждый из которых соответствует определенному интервалу дальностей до точки встречи снаряда с целью. Через шифратор приоритетов (например, микросхема К533ИВ1), вырабатывающий логические сигналы Uлi (i = 1...N) для подключения того или иного функционального устройства, выходы компараторов подключены к логическим входам трех мультиплексоров (например, микросхема К590КН6). На информационные входы первого мультиплексора подаются сигналы с первых функциональных устройств, моделирующих полет снаряда в вертикальной плоскости (Δε) , на второй мультиплексор - с вторых функциональных устройств, моделирующих полет снаряда в горизонтальной плоскости (Δβ) , а на третий мультиплексор - с третьих функциональных устройств, моделирующих время полета снаряда до точки встречи (τ) . Каждое функциональное устройство может быть выполнено в виде операционного усилителя (например, микросхема К140УД6) с двумя входами, первый из которых подключен к выходу сумматора 4, а второй - к соответствующему источнику опорного напряжения. Указанная реализация функциональных устройств требует установки на выходе каждого мультиплексора баллистического блока по инвертору. Исполнение сумматоров, приводов и других блоков прототипа широко известно.
Наличие ряда систем уравнений, каждая из которых с высокой точностью моделирует полет снаряда до точки встречи с целью на определенном интервале дальностей точки встречи, дает возможность значительно расширить область применения предлагаемого способа по сравнению с прототипом. В результате этого, предлагаемые способ и устройство для его реализации обеспечивают высокую точность стрельбы в широком диапазоне дальностей при относительно незначительной стоимости аппаратных средств.
Источники информации.
1. Пугачев В.С. Теория воздушной стрельбы. - М.: Воениздат, 1940.
2. Патент ФРГ N 3332795 кл. F 41 G 5/14, 1985. Устройство для управления огнем подвижного носителя оружия, в частности танка.
3. Преснухин Л.Н., Серебровский Л.А., Юдин Д.Б. Основы теории и проектирования приборов управления, - М.: Оборонгиз, 1960.
4. Демидов В.П., Кутыев Н.Ш. Управление зенитными ракетами, - М.: Воениздат, 1989.
5. Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ, - М.: Энергия, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2213927C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПО ДВИЖУЩЕЙСЯ ЦЕЛИ (ВАРИАНТЫ) | 2007 |
|
RU2347999C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291371C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1997 |
|
RU2124688C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2243482C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКИМ ОГНЕМ ПО ДВИЖУЩИМСЯ ЦЕЛЯМ | 1997 |
|
RU2134892C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2243483C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2247297C1 |
| УСТРОЙСТВО МОДЕЛИРОВАНИЯ ФУНКЦИОНИРОВАНИЯ КОРАБЕЛЬНОГО АРТИЛЛЕРИЙСКОГО КОМПЛЕКСА | 2008 |
|
RU2385817C1 |

Использование: изобретение относится к оружию, а более конкретно к управлению наводкой орудий, и может быть использовано в системах наведения пушечного вооружения. Сущность изобретения: весь диапазон дальности точки встречи разбивают на N интервалов. Каждому интервалу ставят в соответствие свою систему трех уравнений баллистики. Прогнозирование координат точки встречи осуществляют для нормальных условий. Определение сигналов компенсации по месту, азимуту и дальности производят для текущих условий стрельбы. Сигнал текущей дальности точки встречи определяют путем суммирования сигнала прогнозируемой дальности точки встречи и сигнала компенсации по дальности. Перед моделированием баллистики снаряда определяют интервал, в который попадает сигнал текущей дальности точки встречи. Баллистику снаряда на этом интервале моделируют соответствующей системой трех уравнений. Выработку сигналов наведения производят путем суммирования сигналов, соответствующих углам прогнозирования точки встречи, сигналов компенсации и сигналов моделирования баллистики. Интервалы принимают равными 200 - 1000 м. Устройство для наводки орудия содержит последовательно соединенные систему сопровождения цели, блок прогнозирования координат точки встречи снаряда с целью, поправочный блок, а также баллистический блок, первый и второй сумматоры, выходы которых подключены к приводам вертикального и горизонтального наведения, и третий сумматор. Баллистический блок выполнен в виде набора пакетов, каждый из которых содержит три операционных усилителя и реализует одну из N систем уравнений баллистики. На входе в пакеты установлены логические устройства, настроенные на определенные диапазоны дальности точки встречи. В работе участвует то логическое устройство, в чей диапазон попадает текущая дальность точки встречи. Число логических устройств и пакетов соответствует числу интервалов по дальности точки встречи. Технический результат заключается в повышении точности стрельбы на дальности от 1,5 км до максимальной дальности. 2 с. и 3 з. п. ф-лы, 4 ил.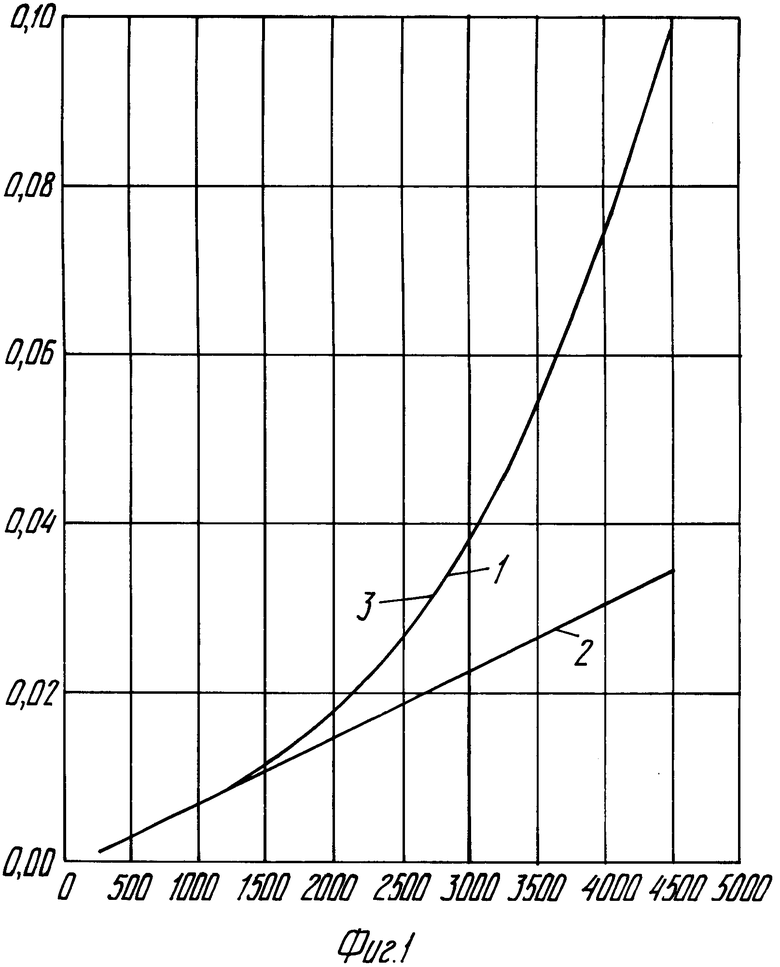
где Δε, Δβ - баллистические поправки на полет снаряда до точки встречи по месту и азимуту соответственно;
τ - время полета снаряда до точки встречи;
ДТ . В - дальность точки встречи;
a1i, b1i, a2i, b2i, a3i, b3i - баллистические коэффициенты i-й системы ряда (i = 1, 2, ..., N).
| Преснухин Л.Н., Серебровский Л.А., Юдин Д.Б | |||
| Основы теории и проектирования приборов управления | |||
| - М.: Оборонгиз, 1960, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |

