Изобретение относится к управляющим устройствам, связанным с процессами определения местоположения (направления), скорости радиолокационными системами. Оно предназначено для управления артиллерийским огнем по движущейся цели.
Известны системы управления огнем средств противовоздушной обороны (ПВО) "Шилка", "Тунгуска", находящиеся в настоящее время на вооружении, в которых вырабатываются координаты точки встречи на основе радиолокационной информации о цели.
Известен также прибор управления артиллерийским зенитным огнем (ПУАЗО) (А. Агренич "Зенитная артиллерия". Воениздат МО, 1960, стр. 120, 141), в котором координаты точки встречи определяются в цилиндрической системе координат: азимут β, дальность d и высота Н. Параметры движения цели являются составляющими вектора путевой скорости цели: Vd, Vβ, Vн.
На основе геометрических координат текущего положения цели и законов их изменения определяются координаты упрежденной точки (точки встречи): азимут βтв, горизонтальная дальность dтв, высота Hтв.
Затем по полученным геометрическим координатам точки встречи с использованием баллистических коноидов определяют угол возвышения орудия ϕ с расчетом, чтобы траектория выпущенного снаряда прошла через расчетную точку встречи.
Угол возвышения представляет собой сумму угла места точки встречи εтв и угла прицеливания α:
ϕ = εтв+α, (1) (1)
где 
Vo - начальная скорость снаряда.
Таким образом, ПУАЗО представляет собой блок выработки координат точки встречи, соединенный с блоком выработки установок для стрельбы.
Известное устройство по своему назначению и технической сущности является наиболее близким предлагаемому техническому решению и поэтому выбрано за прототип.
Устройство-прототип содержит последовательно соединенные радиолокатор определения координат цели, блок выработки координат точки встречи артиллерийского снаряда с целью и блок выработки установок для стрельбы, сигналы с выхода которого поступают на исполнительное устройство.
Поскольку в существующих системах исходные установки (угол возвышения ϕ и упрежденный азимут βтв) вырабатываются по априорным данным, предварительно записанным на коноиды, точность стрельбы невысока. Это объясняется отсутствием учета реальных параметров атмосферы (плотности, температуры, влажности воздуха, скорости ветра) и индивидуальных особенностей партии снарядов (массы, отклонения начальной скорости от табличного значения).
Целью предлагаемого технического решения является повышение точности путем введения поправок (корректур) в формируемые сигналы, пропорциональные углам наведения орудия (ϕ и βтв).
Поставленная цель достигается тем, что в устройство управления артиллерийским огнем по движущимся целям дополнительно введены блок прогнозирования, блок выработки корректур и сумматор. Кроме того, радиолокатор содержит второй канал сопровождения движущегося в сторону цели снаряда. При этом первый, второй и третий входы блока прогнозирования соединены соответственно к выходами "Азимут", "Угол места" и "Наклонная дальность" канала сопровождения снаряда радиолокатора, а четвертый вход соединен с выходом "Высота" блока выработки координат точки встречи. Выходы "Азимут" и "Угол места" блока прогнозирования соединены соответственно с первым и вторым входами блока выработки корректур, третий, четвертый и пятый входы которого соединены с выходами "Азимут" "Горизонтальная дальность" и "Высота" блока выработки координат точки встречи. Первый и второй выхода блока выработки установок для стрельбы, а также первый и второй выхода блока выработки корректур соединены с сумматором, сигналы с выхода которого поступают на исполнительное устройство.
Блок прогнозирования в предлагаемом устройстве содержит первый преобразователь координат, два сглаживающих фильтра, три дифференциатора, делитель, четыре умножителя, два усилителя, квадратор, два сумматора, устройство сравнения, второй преобразователь координат и отслеживающее устройство с соответствующими связями.
Введение указанных признаков позволяет одновременно с сопровождением цели определять текущие координаты движущегося в направлении цели снаряда на начальном участке его траектории и в блоке прогнозирования, осуществляющем аналитическое решение системы дифференциальных уравнений движения центра масс снаряда, определить угловые координаты точки реальной траектории снаряда на высоте, соответствующей высоте расчетной точки встречи. На основе сравнения этих координат с координатами точки встречи определяют необходимые поправки в блоке выработки корректур. Введение в установки для стрельбы этих поправок и позволяет повысить результативность стрельбы. При использовании предлагаемого изобретения обеспечивается возможность заблаговременной пристрелки реперов на траектории с последующим переносом огня, когда учитываются реальные условия полета снаряда (плотность воздуха, температура, влажность, скорость ветра, скорость летательного аппарата, начальная скорость снаряда и т.п.).
Из уровня техники не выявлено решений, имеющих признаки, совпадающие с отличительными признаками изобретения, поэтому можно считать, что предлагаемое техническое решение соответствует условию изобретательского уровня.
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема предлагаемого устройства, на фиг. 2 - структурная схема блока прогнозирования, на фиг. 3 - структурная схема отслеживающего устройства, на фиг. 4 - структурная схема блока выработки корректур, на фиг. 5 представлена траектория движения снаряда.
Предлагаемое устройство (фиг. 1), как и прототип, содержит радиолокатор определения координат движущихся целей 1, выход которого соединен со входом блока выработки координат точки встречи 2, выходы "Азимут", "Высота", и "Горизонтальная дальность" которого подключены к блоку установок для стрельбы 3.
В отличие от прототипа в него дополнительно введены блок прогнозирования 4, блок выработки корректур 5 и сумматор 6. Кроме того, радиолокатор 1 выполнен двухканальным - с каналом сопровождения движущегося в сторону цели снаряда.
На первый, второй и третий входы блока 4 поступают с выходов "Азимут", "Угол места" и "Наклонная дальность" сигналы, соответствующие текущим полярным координатам  снаряда. Четвертый вход блока 4 соединен с выходом "Высота" (Hтв) блока 2. Выходы "Азимут" (βв) и "Угол места" (εв) блока 4 соединены с соответствующими входами блока выработки корректур 5. Третий, четвертый и пятый входы блока 5 соединены соответственно с выходами "Азимут " (βтв), "Горизонтальная дальность" (dтв) и "Высота" (Hтв) блока 2. Выходы, соответствующие углам наведения орудия в горизонтальной (βтв) и вертикальной (ϕ) плоскостях, так же как и выходы блока 5 (Δβ и Δε), соединены с сумматором 6, с выхода которого сигналы, соответствующие установкам для стрельбы, поступают на исполнительное устройство.
снаряда. Четвертый вход блока 4 соединен с выходом "Высота" (Hтв) блока 2. Выходы "Азимут" (βв) и "Угол места" (εв) блока 4 соединены с соответствующими входами блока выработки корректур 5. Третий, четвертый и пятый входы блока 5 соединены соответственно с выходами "Азимут " (βтв), "Горизонтальная дальность" (dтв) и "Высота" (Hтв) блока 2. Выходы, соответствующие углам наведения орудия в горизонтальной (βтв) и вертикальной (ϕ) плоскостях, так же как и выходы блока 5 (Δβ и Δε), соединены с сумматором 6, с выхода которого сигналы, соответствующие установкам для стрельбы, поступают на исполнительное устройство.
Блок прогнозирования 4 осуществляет аналитическое решение системы дифференциальных уравнений движения центра масс снаряда путем разложения в ряд Тейлора зависимости высоты H от горизонтальной дальности d:
где 



Коэффициент K выбирается равным 0,9 для выходящей ветви траектории и 1,1 для нисходящей. Блок прогнозирования может содержать, например, (фиг. 2) первый преобразователь координат 7, два сглаживающих фильтра 8, 9, три дифференциатора 10, 11, 12, делитель 13, четыре умножителя 14, 15, 16, 17, два усилителя 18, 19, квадратор 20, два сумматора 21, 22, устройство сравнения 23, второй преобразователь координат 24 и отслеживающее устройство 25.
Выходы горизонтальной дальности d и высоты H преобразователя координат 7 соединены со входами соответствующих сглаживающих фильтров 8, 9. Выход сглаживающего фильтра (СФ) 9 соединен с дифференциатором 11 и одним из входов сумматора 22.
Выход СФ 8 соединен с дифференциатором 10 и одним из входов сумматора 21.
Выход дифференциатора 11 через дифференциатор 12 соединен с одним из входов делителя 13, другой вход которого подключен непосредственно к выходу дифференциатора 11.
Выход дифференциатора 11 соединен также с одним из входов умножителя 17. Выход делителя 13 соединен с одним из входов умножителя 15, выход которого через усилитель 18 соединен с одним из входов сумматора 21.
Выход дифференциатора 10 соединен с одним из входов умножителя 14, выход которого подключен к одному из входов сумматора 21.
Выход сумматора 21 соединен с одним из входов устройства сравнения 23, на другой вход которого поступает сигнал, пропорциональный высоте точки встречи Hтв с соответствующего входа блока прогнозирования 4.
Выход устройства сравнения 23 соединен со входом отслеживающего устройства 25, к выходу которого подключены входы умножителей 14, 16 и 17, а также вход квадратора 20. Выход квадратора 20 соединен с одним из входов умножителя 16 и через усилитель 19 с одним из входов сумматора 21.
Выход умножителя 16 соединен с одним из входов умножителя 15.
Выход умножителя 17 соединен с одним из входов сумматора 22, выход которого подключен к преобразователю координат (ПК) 24. На другой вход ПК 24 поступает сигнал, пропорциональный соответствующей высоте точки встречи Hтв, с соответствующего входа блока прогнозирования 4.
Выход ПК 24 и третий выход (β) ПК 7 являются выходами блока прогнозирования 4.
Отслеживающее устройство (фиг. 3) может быть выполнено, например, по принципу следящего привода: выход устройства сравнения 23 через усилитель 26 подключен к электродвигателю 27, который механически, например через редуктор 28, связан с движком потенциометра 29, на который подается постоянное напряжение Uпит.
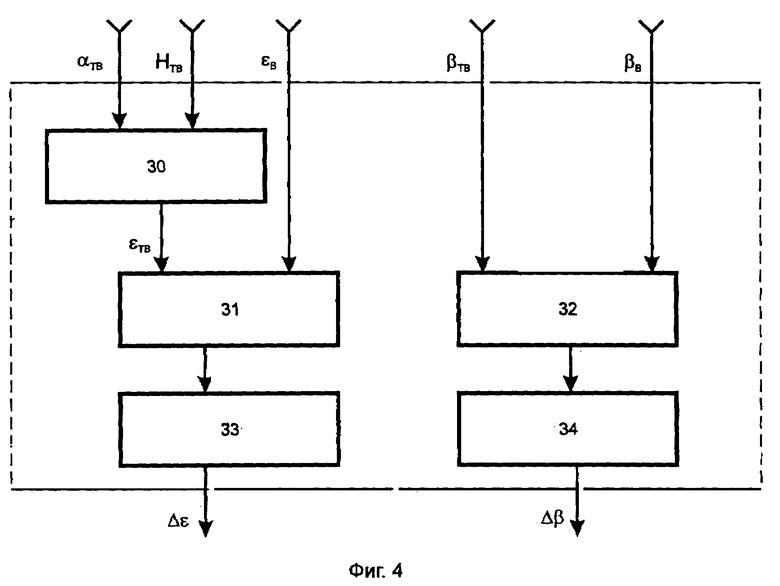
Блок выработки корректур (фиг. 4) включает в себя преобразователь координат 30, два устройства сравнения 31, 32 и два масштабирующих усилителя 33, 34.
Входы блока dтв и Hтв являются входами преобразователя координат 30. Выход преобразователя 30 соединен со входом устройства сравнения 31, с выхода которого сигнал через масштабирующий усилитель 33 проходит на выход блока выработки корректур.
Входы устройства сравнения 32 являются входами βтв и βв блока, а с выхода устройства сравнения сигнал через масштабирующий усилитель 34 проходит на выход блока выработки корректур.
Двухканальный радиолокатор 1 представляет собой, например, совокупность устройств генерирования, излучения и приема радиолокационных сигналов для одного и другого каналов. Отраженные сигналы в каждом канале обрабатываются для выделения информации о целях (данные об их положении, скоростях и т.п.). ("Радиолокационные устройства", под ред. В.В. Григорина-Рябова. "Советское радио", М., 1970, с. 426-432).
Предлагаемое устройство работает следующим образом.
На выходе первого канала РЛС 1 формируются сигналы, пропорциональные координатам цели (азимуту βц, углу места εц и наклонной дальности Dц). На выходе второго канала РЛС 1 - сигналы, пропорциональные полярным координатам летящего в направлении цели снаряда.
По координатам цели блок выработки координат точки встречи 2, решая задачу точки встречи, определяет ее координаты в цилиндрической системе координат, связанной с орудием. По этим координатам блок выработки установок для стрельбы 3 вырабатывает угол возвышения ϕ, согласно соотношениям (1), и азимут точки встречи βтв.
На выходе второго канала РЛС 1 присутствуют полярные координаты снаряда в системе координат, связанной с локатором  Эти координаты поступают на блок прогнозирования 4, на который также поступает сигнал, соответствующий высоте точки встречи Hтв, с блока 2.
Эти координаты поступают на блок прогнозирования 4, на который также поступает сигнал, соответствующий высоте точки встречи Hтв, с блока 2.
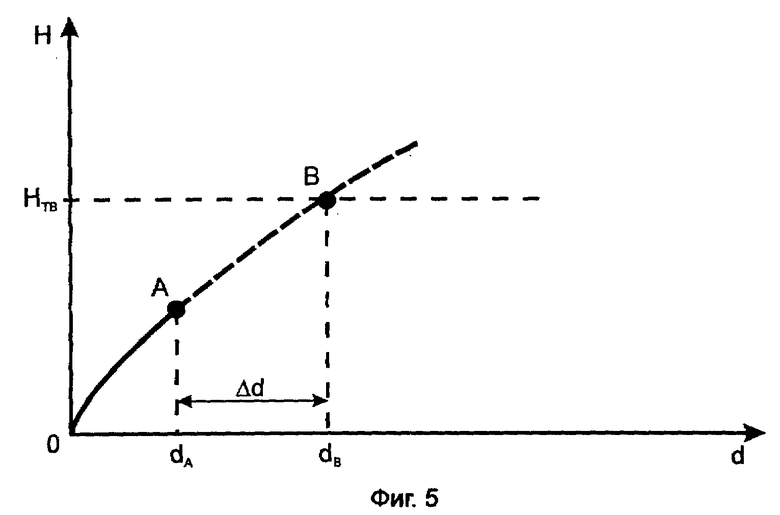
Задачей блока прогнозирования 4 является нахождение угловых координат точки, в которой будет находиться снаряд в момент прохождения высоты Hтв точки встречи (фиг. 5).
Экстраполяция проводится в цилиндрической системе координат. Таким образом, необходимо найти приращение горизонтальной дальности Δd на наблюдаемом участке траектории АВ по результатам сопровождения на участке ОА.
Приращение Δd может быть найдено как решение кубического уравнения: . (2)
. (2)
Это уравнение можно записать так: , (3)
, (3)
где  .
.
Переход к цилиндрической системе координат в общем случае осуществляется в три этапа:
а) перевод из полярной системы координат в декартову систему, связанную с локатором:


где x^, y^, z^ - координаты снаряда в декартовой системе координат, связанной с локатором;
б) смещение начала отсчета декартовой системы координат в точку расположения орудия:


где x
в) перевод из декартовой системы координат в цилиндрическую:
H = y'
где d, H, β - координаты снаряда (дальность, высота, азимут) в цилиндрической системе координат, связанной с орудием.
Полагая, что локатор и орудие расположены в одной точке, преобразование координат значительно упрощается:
Преобразование координат осуществляется в преобразователе координат 7 блока прогнозирования 4. Полученные сигналы координат H и d сглаживаются в соответствующих сглаживающих фильтрах 8 и 9. (  сглаженные координаты).
сглаженные координаты).
Сигнал, пропорциональный  поступает на дифференциатор 11, где формируется сигнал, соответствующий горизонтальный скорости Vd снаряда, а в следующем за ним дифференциаторе 12 - сигнал, пропорциональный горизонтальной составляющей ускорения ad.
поступает на дифференциатор 11, где формируется сигнал, соответствующий горизонтальный скорости Vd снаряда, а в следующем за ним дифференциаторе 12 - сигнал, пропорциональный горизонтальной составляющей ускорения ad.
Дифференциатор 10 по сигналу  вырабатывает сигнал вертикальной скорости Vн.
вырабатывает сигнал вертикальной скорости Vн.
Квадрат и куб величины τ формируются с помощью квадратора 20 и умножителя 19. Отношение dг/Vг определяется делителем 13.
В результате на входы сумматора 21 поступают следующие сигналы: с выхода сглаживающего фильтра 8;
с выхода сглаживающего фильтра 8;
τVн - с выхода умножителя 14; с выхода квадратора 20 через усилитель 19 с коэффициентом усиления g/2;
с выхода квадратора 20 через усилитель 19 с коэффициентом усиления g/2; с выхода умножителя 15 через усилитель 18 с коэффициентом усиления gK/3.
с выхода умножителя 15 через усилитель 18 с коэффициентом усиления gK/3.
В сумматоре 21 формируется сигнал, соответствующий правой части уравнения (3). Этот сигнал поступает на устройство сравнения 23, на другой вход которого поступает сигнал, пропорциональный левой части уравнения (3) Hтв. Полученный сигнал рассогласования Δ поступает на отслеживающее устройство 25, задачей которого является сведение Δ к нулю путем соответствующего изменения выходного сигнала τ. В этом случае сигнал  соответствует решению уравнения (3) и поступает на умножитель 17, где путем умножения на выходной сигнал дифференциатора 11 преобразуется в сигнал, соответствующий приращению горизонтальной дальности Δd.
соответствует решению уравнения (3) и поступает на умножитель 17, где путем умножения на выходной сигнал дифференциатора 11 преобразуется в сигнал, соответствующий приращению горизонтальной дальности Δd.
Для получения сигнала, соответствующего горизонтальной дальности до точки B (фиг. 5), сигналы, пропорциональные  поступают на сумматор 22.
поступают на сумматор 22.
Во втором преобразователе координат 24 на основе соотношения (1) происходит преобразование поступающих на него сигналов, соответствующих dв и Hтв, в сигнал, пропорциональный εв.
Полученные на выходе блока прогнозирования 4 угловые координаты точки B (εв и βв) поступают на входы блока выработки корректур 5. На другие входы этого блока поступают сигналы, соответствующие координатам расчетной точки встречи (βтв, dтв, Hтв) в цилиндрической системе координат. Преобразователь координат 30 осуществляет преобразование поступающих на его вход сигналов, соответствующих dтв и Hтв, согласно соотношению (1). С его выхода сигнал, соответствующий углу места точки встречи εтв, поступает на вход устройства сравнения 31, на другой вход которого поступает сигнал, пропорциональный εв. С выхода устройства сравнения 31 сигнал проходит через масштабирующий усилитель 33 на выход Δε блока выработки корректур.
Аналогично сигналы, соответствующие βтв и βв, поступают на входы устройства сравнения 32, с выхода которого сигнал (через масштабирующий усилитель 34) проходит на выход Δβ блока.
Полученные таким образом сигналы корректуры Δε и Δβ поступают на входы сумматора 6 (фиг. 1), где складываются с сигналами установок βтв и ϕ, поступающими с блока 3. Скорректированные сигналы установок (βтв+Δβ) и (ϕ+Δε) поступают с выхода сумматора 6 на исполнительное устройство, которым является механизм наведения орудия.
Работоспособность предлагаемого устройства проверялась при моделировании на ЭВМ, а точность метода экстраполяции, основанного на решении уравнения (2), проверялась по реальным траекториям снарядов, полученным в ходе проведения натурных экспериментов.
Результаты экспериментов подтвердили, что предлагаемое устройство обеспечивает более высокую точность стрельбы по сравнению с известными устройствами, принцип работы которых основан на использовании полетного времени снаряда, которое может быть определено только приближенно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЧАЛЬНЫХ УСЛОВИЙ НЕЛИНЕЙНОЙ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ | 2011 |
|
RU2483272C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАВОДКИ ОРУДИЯ | 1995 |
|
RU2111437C1 |
| УСТРОЙСТВО МОДЕЛИРОВАНИЯ ФУНКЦИОНИРОВАНИЯ КОРАБЕЛЬНОГО АРТИЛЛЕРИЙСКОГО КОМПЛЕКСА | 2008 |
|
RU2385817C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ОРУЖИЕМ ОГНЕВОЙ ЗАЩИТЫ НОСИТЕЛЯ С РАДИОЛОКАЦИОННЫМ ПРИЦЕЛОМ | 2003 |
|
RU2230277C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| Способ пуска зенитной управляемой ракеты и система пуска зенитной управляемой ракеты | 2021 |
|
RU2790339C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
Изобретение относится к управляющим системам и может быть использовано для управления артиллерийским огнем. Достигаемый технический результат - повышение точности выработки координат точки встречи. Устройство содержит радиолокатор определения координат цели, выходы которого соединены с входами блока выработки установок для стрельбы, а также блок прогнозирования, блок выработки корректур и сумматор, причем радиолокатор выполнен двухканальным с каналом сопровождения снаряда. Входы блока прогнозирования соединены соответственно с выходами канала сопровождения снаряда и с выходом блока выработки координат точки встречи. Выходы блока прогнозирования соединены соответственно с первым и вторым входами блока выработки корректур, третий, четвертый и пятый входы которого соединены с выходами блока выработки координат точки встречи, а первый и второй выходы блоков выработки установок для стрельбы и выработки корректур соединены с сумматором, сигналы с выхода которого поступают на исполнительное устройство. 1 з.п.ф-лы, 5 ил.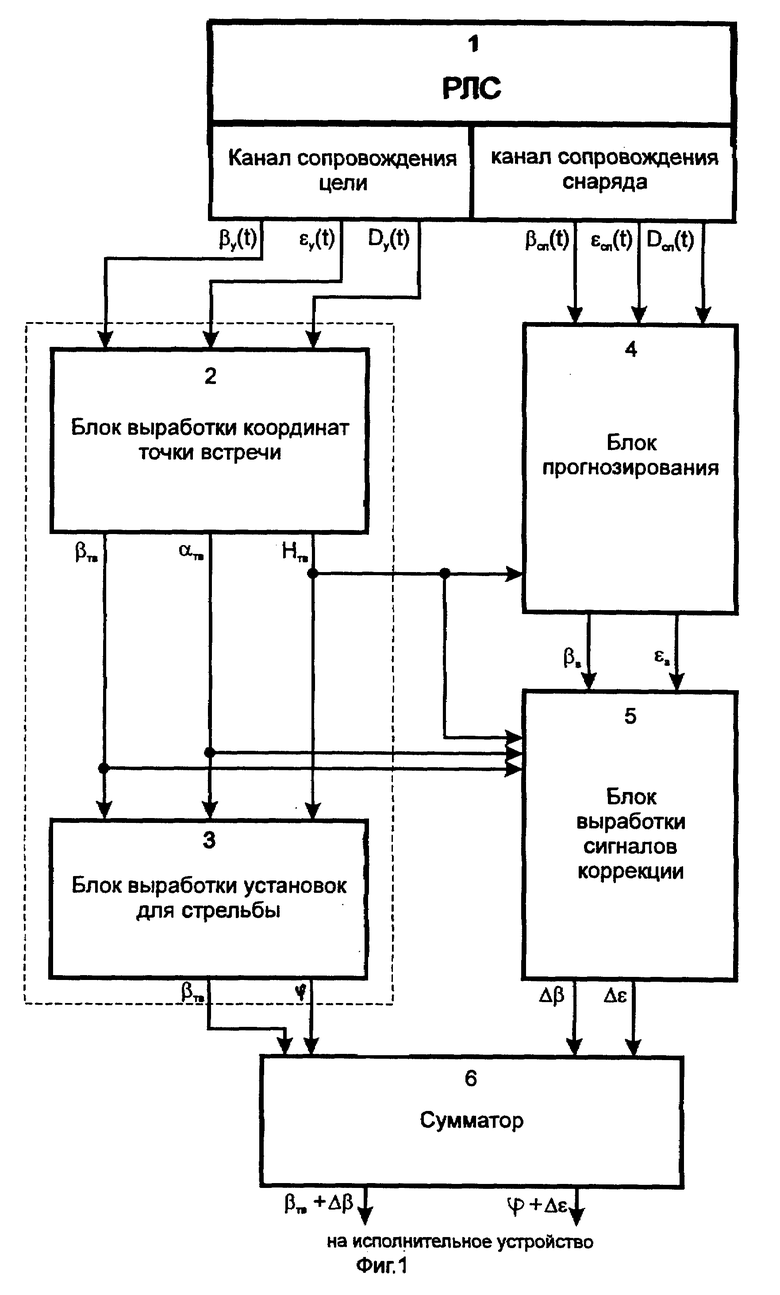
| Демидов В.П | |||
| и др | |||
| Управление зенитными ракетами | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Военное издательство, 1989, с.76-80, 187-188 | |||
| Мубаракшин Р.Б | |||
| и др | |||
| Прицеливание с помощью оптических прицелов при стрельбе с истребителей по воздушной цели | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Топочная решетка для многозольного топлива | 1923 |
|
SU133A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| GB 1485619 A1, 14.09.77 | |||
| US 3743216 A, 03.07.73 | |||
| US 3723005 A, 27.03.73. | |||

