Изобретение относится к области управления беспилотными летательными аппаратами (ЛА) военного назначения, в частности к управлению артиллерийскими снарядами с головками самонаведения (ГСН) и позволяет уменьшить рассеивание снарядов, образовавшееся на баллистическом участке полета, что, в свою очередь, обеспечивает повышение вероятности поражения цели.
Вероятность поражения цели снарядов с ГСН, в первую очередь, зависит от точности вывода снарядов в зону захвата ГСН излучения от цели.
Самонаводящиеся снаряды с большой дальностью стрельбы (15 - 20 км) основную часть времени полета движутся по баллистической траектории, т.е. управляются. Вследствие этого неизбежно возникает рассеивание снарядов, обусловленное техническим рассеиванием (вследствие разбросов коэффициента лобового сопротивления, угла и скорости запуска, массы снаряда) и ошибками подготовки стрельбы (ошибками определения дальности стрельбы, температуры метательного заряда, ветра, давления и температуры воздуха, способа расчета установок, упреждения движения цели и т.д.).
Известен способ вывода снаряда в зону захвата цели ГСН, предложенный на стадии предварительной разработки артиллерийского снаряда "Copperhead" с полуактивной лазерной ГСН, включающий запуск снаряда из пускового устройства (155 мм гаубицы) под углом θ0 к горизонту с начальной скоростью V0, баллистический полет и самонаведение на конечном участке траектории до попадания снаряда в цель [1].
Способ обладает тем недостатком, что при стрельбе на большие дальности по баллистической траектории устанавливаются такие высоты полета снаряда, которые превышают значения высот нижней границы облачности, т.е. между ГСН и целью устанавливается помеха в виде облачности. Эта помеха не позволяет оптическим ГСН принимать излучение от цели, тем самым существенно снижая дальность захвата ГСН цели.
Малые значения дальности захвата ГСН цели и большие значения ошибок стрельбы (в первую очередь, технического рассеивания снарядов) не позволяют обеспечить высокой вероятности поражения цели.
Увеличить дальность захвата цели ГСН позволяет способ наведения артиллерийского снаряда Copperhead", предложенный на этапе инженерной разработки [2], включающий запуск ЛА из пускового устройства под углом θ0 к горизонту с начальной скоростью V0, баллистический полет, участок полета с заданным углом тангажа (участок инерциального наведения) и самонаведения до попадания снаряда в цель.
Применение инерциального наведения в рассматриваемом способе позволяет при стрельбе на большие дальности уменьшить высоты траектории полета снаряда (т. е. обеспечить более пологие траектории полета до момента захвата цели), тем самым увеличить дальности захвата ГСН цели. Кроме того, участок инерциального наведения позволяет увеличить дальность полета снаряда на 25% по сравнению со способом, изложенным в [1].
Однако, способу по работе [2] присущ существенный недостаток, который заключается в том, что техническое рассеивание снарядов, образовавшееся к концу участка баллистического полета, будет сохранено и на всем участке инерциального наведения вплоть до момента начала самонаведения, поскольку на участке инерциального наведения полет снаряда (планирование) осуществляется под постоянным, заранее заданным углом наклона продольной оси снаряда, который обеспечивается системой стабилизации угла тангажа, см. фиг. 1.
Большие значения технического рассеивания снаряда, образовавшиеся к концу баллистического участка траектории, сохранившиеся на инерциальном участке наведения до момента начала самонаведения, снижают вероятность захвата ГСН цели, уменьшают вероятность попадания снаряда в область начальных промахов, выбираемых в процессе самонаведения, что в целом уменьшает вероятность поражения цели.
Предлагаемый способ комбинированного управления, позволяющий повысить вероятность поражения цели вследствие уменьшения технического рассеивания за счет программного изменения угла наклона продольной оси снаряда к горизонту на участке инерциального наведения, включает запуск снаряда из пускового устройства под углом θ0 к горизонту с начальной скоростью V0 наведение снаряда по баллистической траектории, инерциальное наведение снаряда с программным углом наклона продольной оси снаряда к горизонту, самонаведение до непосредственного попадания снаряда в цель, отличающийся тем, что величина сигналов управления Uвх на входе рулевого привода снаряда на участке инерциального наведения рассчитывается в соответствии с зависимостями: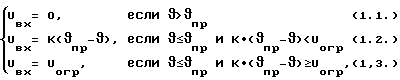
где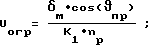
δm - максимальный угол отклонения рулей;
K1 - коэффициент передачи рулевого привода;
np - расчетная поперечная перегрузка в высшей точке баллистического полета при запуске под углом θ0-3τθ0 с начальной скоростью V0-3σV0; среднеквадратическое отклонение угла запуска снаряда;
среднеквадратическое отклонение угла запуска снаряда; среднеквадратическое отклонение скорости запуска снаряда;
среднеквадратическое отклонение скорости запуска снаряда;
ϑпр - программный угол наклона продольной оси снаряда;
ϑ - текущий угол наклона продольной оси снаряда;
K - коэффициент передачи датчика угла тангажа.
Уменьшение технического рассеивания снаряда к моменту начала самонаведения достигается посредством сведения траектории планирования снаряда к опорной траектории.
В качестве опорной траектории из всей совокупности траекторий, определяемых техническим рассеиванием снаряда, выбрана такая, при которой устанавливаются наименьшие высоты полета, т.е. реальные траектории полета снаряда на баллистическом участке будут располагаться всегда выше опорной траектории полета.
Технически программное изменение угла наклона снаряда к горизонту осуществляется за счет ввода ограничений на углы отклонений элементов управления снарядом (например, аэродинамических рулей), которые, в свою очередь, достигаются через ограничения, накладываемые на уровень входного сигнала на рулевой привод.
Величина ограничения уровня входного сигнала на рулевой привод (Uогр) определяется значением входного сигнала, требуемого для движения снаряда по опорной траектории. Это значение входного сигнала определяется располагаемой перегрузкой снаряда и обеспечивает компенсацию ускорения свободного падения и инерциальное наведение.
В реальных пусках снаряды, движущиеся по траекториям, превышающим опорную, имеют меньшую перегрузку вследствие меньшей плотности воздуха. Соответственно для планирования с заданным углом наклона траектории на высоте полета большей высоты опорной траектории требуется большая команда управления. Ограничение же команды приводит к недокомпенсации силы тяжести и, как следствие, искривлению траектории в направлении опорной (фиг. 2). По мере приближения к опорной траектории возрастает скорость снаряда и плотность воздуха, а следовательно, растет и перегрузка. Этот процесс продолжается до тех, пор пока развиваемая под действием команды Uогр перегрузка не скомпенсирует действие ускорения свободного падения. Это произойдет, когда снаряд окажется на опорной траектории или в непосредственной близости от нее. Далее движение снаряда происходит вблизи или по этой траектории.
Для иллюстрации изложенного метода управления приведем пример.
Исходные данные:
масса ЛА, m = 50 кг;
площадь миделевого сечения, S = 0,0181 м2;
коэффициент лобового сопротивления, Cx = 0,4;
коэффициент подъемной силы, C
коэффициент стабилизирующего момента, m
коэффициент управляющего момента, m
плотность воздуха на уровне моря, ρ0 = 1,226 кг/м3;
ускорение свободного падения, 
начальная скорость ЛА, 
угол пуска θ0 = (45±15)o;
δm = 10o; K1 = 5o/В; K = 1 В/0;
угол наклона траектории на участке инерциального наведения θпр = -25o;
Параметры траектории на баллистическом участке могут быть определены по зависимостям [3, стр. 38, 74]:

ϑ‗‗θ (2.6)
где
Vs, Ys - скорость и высота в вершине траектории.
Располагаемая перегрузка снаряда в любой точке траектории может быть определена по зависимости [4, стр. 128):
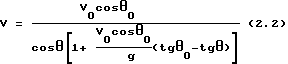
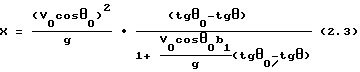
Параметры траектории на участке инерциального наведения могут быть определены по зависимостям: [4, стр. 128 - 129]



Для опорной траектории 1 (фиг. 3) при  θ
θ ts=24,7 c; Ys=3540 м; Xs=7300 м.
ts=24,7 c; Ys=3540 м; Xs=7300 м.
Располагаемая перегрузка в соответствии с (3) будет равняться 1,8 ед, а уровень ограничения Uогр, из уравнения (1,1 - 1,3) будет равен 1,01 В.
В соответствии с уравнением (4,5) для удержания наклона траектории под углом θ = -25o необходимо задать программный угол тангажа, равный ϑ = -22,5o. К началу участка инерциального наведения (при θ = -25o), пренебрегая управляющим воздействием во время набора балансированного угла атаки, получим следующие параметры траектории  34,5 c;
34,5 c;  207,5 м/с;
207,5 м/с;  3135 м;
3135 м;  9330 м. При дальнейшем движении под углом θ = -25o промах ЛА относительно цели, расположенной на дальности 16500 м, составит "минус" 211 м.
9330 м. При дальнейшем движении под углом θ = -25o промах ЛА относительно цели, расположенной на дальности 16500 м, составит "минус" 211 м.
Для траектории 2 (фиг. 3), полученной при  θ0= 50o, к началу инерциального наведения (θu= -25o), будет иметь
θ0= 50o, к началу инерциального наведения (θu= -25o), будет иметь  37,4 с;
37,4 с;  171,6 м/с;
171,6 м/с;  4970 м;
4970 м;  8700 м; np=0,8 ед.
8700 м; np=0,8 ед.
При известном способе наведения при отсутствии ограничения на величину команды управления ЛА будет сохранять угол наклона траектории, начиная с 40 с, равный θ = -25o. Промах по цели, расположенной на дальности 16500 м, составит 1205 м (траектория 2, фиг. 3).
В предлагаемом способе наведения, в следствии того, что развиваемая снарядом перегрузка будет к началу участка инерциального наведения ограничена величиной:  то под действием ускорения силы тяжести угол наклона траектории снаряда будет увеличиваться до тех пор, пока растущая с набором скорости и повышением плотности воздуха развиваемая перегрузка снаряда не приблизится к величине g•cosθ. Это произойдет при угле наклона траектории "минус" 37o в момент времени t=50,4 с. После этого под действием команды Uогр угол продольной оси снаряда начнет приближаться к программному значению, а угол наклона траектории к "минус" 25o.
то под действием ускорения силы тяжести угол наклона траектории снаряда будет увеличиваться до тех пор, пока растущая с набором скорости и повышением плотности воздуха развиваемая перегрузка снаряда не приблизится к величине g•cosθ. Это произойдет при угле наклона траектории "минус" 37o в момент времени t=50,4 с. После этого под действием команды Uогр угол продольной оси снаряда начнет приближаться к программному значению, а угол наклона траектории к "минус" 25o.
В момент времени t=69 с снаряд окажется в точке с координатами x=14300 м, y= 1330 м. При этом располагаемая перегрузка будет равна np=2,85 ед, скорость  угол тангажа снаряда ϑ = -22,5o, угол наклона траектории θ = -29o. С этого момента угол тангажа снаряда и соответственно угол наклона траектории будут находиться вблизи программных значений. Промах относительно цели в предлагаемом способе составит 275 м вместо 1205 м по известному способу (кривая 3, фиг. 3).
угол тангажа снаряда ϑ = -22,5o, угол наклона траектории θ = -29o. С этого момента угол тангажа снаряда и соответственно угол наклона траектории будут находиться вблизи программных значений. Промах относительно цели в предлагаемом способе составит 275 м вместо 1205 м по известному способу (кривая 3, фиг. 3).
Технически приведенный способ управления реализуется на усилителе-ограничителе с двойным ограничением по амплитуде [3]. Уровни ограничения устанавливаются непосредственно перед пуском снаряда таким образом, чтобы амплитуда первого ограничения равнялась A=Uогр, а амплитуда второго ограничения была равна B=0 (фиг. 4).
Тогда, если измеренный угол наклона продольной оси снаряда ϑ будет больше ϑпр, то управляющий сигнал на РП Uвх обнуляется. В случае, когда ϑ < ϑпр, а требуемое значение Uвх не превышает Uогр, осуществляется управление по линейному закону Uвх= K•(ϑпр-ϑ). При достижении ϑ некоторого значения ϑогр, при котором K•(ϑпр-ϑ)>Uогр, управляющий сигнал ограничивается на уровне Uогр.
Величина расчетной поперечной перегрузки снаряда в высшей точке опорной траектории может быть определена заранее и внесена в таблицы стрельбы или в случае автоматизированного расчета установок в вычислителе должен быть реализован алгоритм расчета располагаемой перегрузки.
Приближенно значение располагаемой перегрузки может быть определено по зависимости (3) при Y=Ys', V=Vs'.
Значение высоты траектории Ys и скорости в вершине траектории Vs определяются по зависимостям (2.1 - 2.5), полагая в них θ = 0. В начале задаются приближенные значения Ys и Vs и по зависимости (2.5) вычисляется b1, затем по зависимостям (2.2) и (2.4) определяются уточненные значения b1. Как только два последовательно вычисленных значения Ys' и Vs' будут отличаться друг от друга не более заданий величины (например 1%), то вычисляется nпр по зависимости (3).
Литература.
1. Журнал "Ракетная техника и космонавтика", т. 16, N 2, февраль 1978 г. , "Мир", Москва, стр. 184 - 194.
2. Журнал "Ракетная техника и космонавтика", т. 18, N 2, февраль 1980 г. , "Мир", Москва, стр. 128 - 138.
3. Окунев Б.Н. Основная задача внешней баллистики и аналитические методы ее решения. ОНТИ, ГТТИ, Ленинград, Москва 1934 г.
4. Дмитриевский А.А. Внешняя баллистика - М.: Машиностроение, 1972 г., стр. 584.
5. Тетельбаум И. М. , Шнейдер Ю.Р. Практика аналогового моделирования динамических систем: Справочное пособие - М.: Энергоатомиздат, 1987 г., стр. 149.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2000 |
|
RU2183006C2 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2005 |
|
RU2300726C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ КЛАССА ВОЗДУХ - ПОВЕРХНОСТЬ | 1997 |
|
RU2111439C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БАЛЛИСТИЧЕСКОГО САМОНАВОДЯЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА "ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ" | 2002 |
|
RU2216708C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ | 2003 |
|
RU2284444C2 |

Изобретение относится к управлению беспилотными летательными аппаратами военного назначения, в частности к управлению артиллерийскими снарядами с головками самонаведения, траектории полета которых предполагают три участка: баллистический участок, участок полета с постоянным углом наклона продольной оси к горизонту (участок планирования) и участок самонаведения. Техническим результатом изобретения является уменьшение на участке планирования технического рассеивания артиллерийского снаряда, возникающего к концу баллистического участка полета, за счет сведения траектории планирования снаряда к опорной до момента начала самонаведения. Сущность изобретения заключается в ограничении углов отклонения элементов управления снарядом (например, аэродинамических рулей), что, в свою очередь, обеспечивается за счет ограничения входного сигнала на рулевой привод (РП) на участке планирования. При этом уровень сигнала на РП определяется значением управляющего сигнала, требуемого для движения снаряда по опорной траектории, лежащей ниже реальных траекторий. 4 ил.
Способ комбинированного управления летательным аппаратом (ЛА), включающий запуск ЛА из пускового устройства под углом Θ0 к горизонту с начальной скоростью V0, наведение ЛА по баллистической траектории, инерциальное наведение ЛА с программным углом наклона продольной оси ЛА к горизонту, самонаведение до непосредственного попадания ЛА в цель, отличающийся тем, что величина сигналов управления Uвх на входе рулевого привода ЛА на участке инерциального наведения рассчитывается в соответствии с зависимостями
где Uогр - величина ограничения уровня входного сигнала;
δm - максимальный угол отклонения рулей;
ϑпр - программный угол наклона продольной оси ЛА;
ϑ - текущий угол наклона продольной оси ЛА;
K - коэффициент передачи датчика угла тангажа;
K1 - коэффициент передачи рулевого привода;
nр - расчетная поперечная перегрузка ЛА в высшей точке баллистического полета при запуске под углом Θ0-3σθ0 с начальной скоростью 
σθ0 - среднеквадратическое отклонение угла запуска ЛА;  среднеквадратическое отклонение скорости запуска ЛА.
среднеквадратическое отклонение скорости запуска ЛА.
| Ж-л "Ракетная техника и космонавтика", т | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Самонаправляющееся боевое средство | 1949 |
|
SU837143A2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2079806C1 |
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ С ПОЛИМЕРНЫМ ПОКРЫТИЕМ | 1997 |
|
RU2126322C1 |
| US 4381090 A, 26.04.83 | |||
| US 4500051 A, 19.02.85 | |||
| US 4898341 A, 06.02.90 | |||
| DE 3522154 A1, 02.01.87. | |||

