Изобретение относится к железнодорожной автоматике и может быть использовано для контроля состояний рельсовых линий в централизованных системах автоблокировки.
Известен способ контроля свободного состояния рельсовой линии (а.с. N 1491761, кл. B 61 L 23/16 по заявке N 4200524/27-11, приоритет от 25.02.87, выдано 07.07.89, Бюл. N 25), при котором в каждый дискретный момент времени определяются абсолютные значения приращения параметра сигнала контроля состояния рельсовой линии (сигнала КРЛ). В том случае если приращение больше порога, принимается решение о свободном и исправном состоянии рельсовой линии.
Известен способ контроля свободного состояния рельсовой линии (а.с. N 1477613 по заявке N 4201085/27-11 от 25.02.87, выдано 07.05.89, Бюл. N 17), при котором в каждый дискретный момент времени определяют абсолютное значение амплитуды и приращения сигнала КРЛ. В процессе обработки вычисляется средняя величина и переменная составляющая огибающей сигнала КРЛ. Путем сравнения рассчитанных величин с заданным пороговым значением микропроцессор принимает решение о наличии или отсутствии движущегося шунта.
Пороговые значения в указанных методах контроля считаются постоянными, хотя под действием внешних условий (из-за колебаний сопротивления балласта, температуры, действия помех и др.) происходит изменение напряжения сигнала КРЛ в нормальном и шунтовом режимах.
В статье Лисенков В.М., Беляков И.В., Крылов А.Ю., Суханова Н.В., Ковалев И.П., Сидельников С.С. Адаптивный приемник сигналов контроля состояний рельсовых линий//Межвуз. сб. науч. тр.: Микроэлектронные системы интервального регулирования движения поездов. - М.: МИИТ. - 1990. - Вып. 838, с. 5 - 12) описан способ контроля свободного состояния рельсовой линии с помощью микропроцессорного приемопередатчика, который был выбран в качестве прототипа.
При указанном способе контроля передают в рельсовую линию и принимают от нее посредством приемопередатчика сигнал. На входе приемной части устройства определяют значения огибающей сигнала, по которым рассчитывают решающую статистику в виде кумулятивной суммы:
где
Sk - кумулятивная сумма в момент времени k;
yk - огибающая сигнала,
θ1 - среднее значение огибающей сигнала в шунтовом режиме,
θ2 - среднее значение огибающей сигнала в нормальном режиме,
σ2 - дисперсия помех.
Расчет кумулятивной суммы выполняется с учетом заданных средних значений огибающей, соответствующих нормальному и шунтовому режимам. Кумулятивную сумму сравнивают с порогом, при превышении которого формируют сигнал свободности рельсовой линии, а в противном случае выдают сигнал занятости.
Для определения среднего значения огибающей сигнала в нормальном и шунтовом режиме используется фильтр Калмана:
где
θh,i - среднее значение огибающей сигнала (h = 1 в шунтовом режиме, h = 2 в нормальном режиме); - дисперсия оценки;
- дисперсия оценки;
yk - значение огибающей сигнала;
σ
k, i = 1, 2,.... N - номер отсчета сигнала.
Недостатком указанного способа контроля является то, что при включении питания приемника необходимо задать начальные средние значения огибающей сигнала в шунтовом и нормальном режимах θ1 и θ2 . Если в качестве указанных средних значений огибающей сигнала использовать постоянные величины, то возможна ситуация рассогласования настройки приемника и параметров сигнала.
Технический эффект изобретения - повышение точности контроля.
Технический эффект достигается за счет того, что в рельсовую линию в момент включения приемопередатчика выдают обучающий сигнал определенной длительности, а сигнал, используемый для контроля свободного состояния рельсовой линии, подают через промежуток времени, равный длительности обучающего сигнала, при этом на входе приемной части приемопередатчика определяют средние значения огибающей, соответствующие нормальному и шунтовому режимам, которые используют в качестве заданных начальных значений при определении кумулятивной суммы.
Контроль свободного состояния рельсовой линии выполняется следующим образом. После включения питания приемопередатчик подает в рельсовую линию обучающий сигнал определенной длительности. Обучающий сигнал имитирует переключение рельсовой линии из шунтового в нормальный режим работы (фиг. 1). На входе приемной части приемопередатчика принимается обучающий сигнал. Обучающий сигнал используется для расчета средних значений огибающей сигнала в шунтовом и нормальном режимах по формулам 2. Если обучающий сигнал подается в свободную рельсовую линию, то приемопередатчик вычисляет огибающую сигнала и ее средние значения в нормальном θ2 и шунтовом θ1 режимах. Указанные значения используются в качестве заданных начальных значений для определения кумулятивной суммы по формуле 1. Если в период подачи обучающего сигнала рельсовая линия была занята поездом, то средние значения огибающей сигнала в шунтовом и нормальном режимах θ1 и θ2 будут одинаковыми, а величина кумулятивной суммы будет равна нулю Sk = 0. Приемник определит, что рельсовая линия находится в шунтовом режиме. После освобождения поездом рельсовой линии будет выполнен расчет средних значений огибающей в шунтовом и нормальном режимах θ1 и θ2 . После выключения обучающего сигнала в рельсовую линию подают сигнал, используемый для контроля свободного состояния рельсовой линии. В приемной части приемопередатчика принимают сигнал, упомянутый выше, определяют величину огибающей и ее средние значения в нормальном и шунтовом режиме по формуле 2. Указанные значения используются для расчета кумулятивной суммы (см. формулу 1), которая сравнивается с порогом. Если кумулятивная сумма больше порога, то формируется сигнал свободности рельсовой линии, в противном случае выдается сигнал занятости.
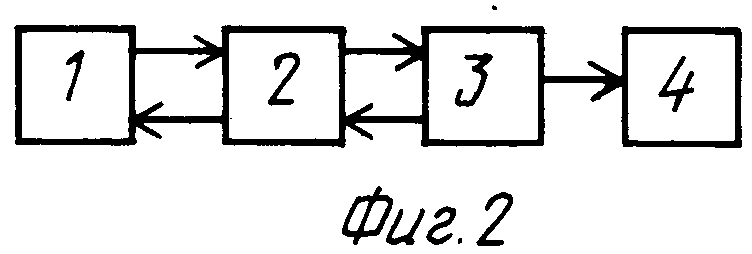
Схема устройства реализующего описанный способ контроля свободного состояния рельсовой линии, приведена на фиг. 2.
Приемопередатчик 3 через устройство защиты и сопряжение 2 передает и принимает сигналы КРЛ из рельсовой линии 1. Выход приемопередатчика соединен с элементом фиксации состояния рельсовой линии 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНИК ДЛЯ РЕЛЬСОВОЙ ЦЕПИ | 1995 |
|
RU2091262C1 |
| ПРИЕМНИК ДЛЯ РЕЛЬСОВОЙ ЦЕПИ | 1995 |
|
RU2089428C1 |
| ПРИЕМНИК ДЛЯ РЕЛЬСОВОЙ ЦЕПИ | 1994 |
|
RU2083410C1 |
| ПРИЕМНИК ДЛЯ РЕЛЬСОВОЙ ЦЕПИ | 1996 |
|
RU2104199C1 |
| Приемник для рельсовой цепи | 1990 |
|
SU1791250A1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ | 2003 |
|
RU2243118C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ | 2003 |
|
RU2263040C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2010 |
|
RU2423268C1 |
| УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2010 |
|
RU2438904C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2009 |
|
RU2410268C1 |
Сущность изобретения: для контроля свободного состояния рельсовой линии передают в рельсовую линию и принимают от нее посредством приемопередатчика сигнал, определяют значения его огибающей на входе приемной части приемопередатчика, по которым определяют решающую статистику в виде кумулятивной суммы, которую сравнивают с заданным порогом, при превышении порога формируют сигнал свободности рельсовой линии, а в противном случае выдают сигнал занятости, при включении приемопередатчика в рельсовую линию выдают обучающий сигнал, а сигнал, упомянутый выше, подают через промежуток времени, равный длительности обучающего сигнала, при этом на входе приемной части приемопередатчика определяют средние значения огибающей, соответствующие нормальному и шунтовому режимам, которые используют в качестве заданных начальных значений при определении кумулятивной суммы. Изобретение повышает точность контроля состояния рельсовой линии. 2 ил.
Способ контроля свободного состояния рельсовой линии, в котором передают в рельсовую линию и принимают от нее посредством приемопередатчика сигнал, определяют значения его огибающей на входе приемной части приемопередатчика, по которым определяют решающую статистику в виде кумулятивной суммы с учетом заданных значений, соответствующих нормальному и шунтовому режимам, кумулятивную сумму сравнивают с заданным порогом, при превышении которого формируют сигнал свободности рельсовой линии, а в противном случае выдают сигнал занятости, отличающийся тем, что при включении приемопередатчика в рельсовую линию выдают обучающий сигнал, а сигнал, упомянутый выше, подают через промежуток времени, равный длительности обучающего сигнала, при этом на входе приемной части приемопередатчика определяют средние значения огибающей, соответствующие нормальному и шунтовому режимам, которые используют в качестве заданных начальных значений при определении кумулятивной суммы.
