Изобретение относится к грузоподъемным устройствам и может быть использовано для передачи длинномерного груза с одного судна на другое в условиях воздействия ветра и волнения моря.
Известны устройства для передача груза с одного судна на другое, в которых используются судовые краны или специальные грузопередающие системы, оснащенные канатными связями между судами и соответствующими к ним механизмами, отслеживающими взаимные перемещения судов [1].
Однако для передачи длинномерного груза применение известных устройств сопряжено с возможностями соударения груза с элементами конструкции судов на местах съема (укладки) груза под воздействием ветровых нагрузок и при наличии качки судов.
Наиболее близким техническим решением к предлагаемому изобретению является грузопередающая система одноканатной дороги с качающимися консолями, разработанная в Англии [там же с. 99-100, рис. 47].
Известная система состоит из судна снабжения и принимающего судна, оборудованных соответственно передающей и принимающей консолями, связанных между собой канатной дорогой с механизмами поддержания постоянного натяжения в канатах, на которых установлена самоходная грузовая тележка с подвешиваемым к ней грузом. На судне снабжения груз подается к месту его передачи на другое судно с помощью роликового транспортера. Съем и укладка груза с транспортера одного судна на палубу другого судна обеспечивается качающимися консолями с помощью их гидроприводов.
Однако, уменьшая нежелательные колебания груза в момент его передачи, известная система не исключает возможности его соударения с конструкцией отведенных мест съема (укладки) на судах при отклонениях и разворотах груза под действием ветровой нагрузки, а также крена судов.
Технической задачей, решаемой настоящим изобретением, является обеспечение безопасности работ и сохранности длинномерного груза от соударения в процессе перегрузки за счет принудительного его ориентирования в момент съема (или укладки) с транспортера и в процессе подъема с одного судна на другое, а также амортизации подвода траверс к грузу и амортизации груза при съеме (укладке) с транспортера в условиях имеющихся взаимных перемещений судов.
Указанная задача достигается тем, что система снабжена дополнительной самоходной грузовой тележкой, причем обе эти тележки установлены на приемной консоли и каждая из них оснащена механизмами подъема, грузовыми подвесками и вертикально расположенными направляющими канатами, при этом на грузовые подвески навешены траверсы, оборудованные бугелями и узлами захвата направляющих канатов, а транспортер выполнен с опорами для груза, оборудованными узлами захвата направляющих канатов и ловителями для взаимодействия с бугелями траверс.
Также для обеспечения безударности съема (укладки) груза в условиях вертикальных перемещений судна на транспортере опоры для груза и ловителей для бугелей траверс снабжены амортизационными элементами.
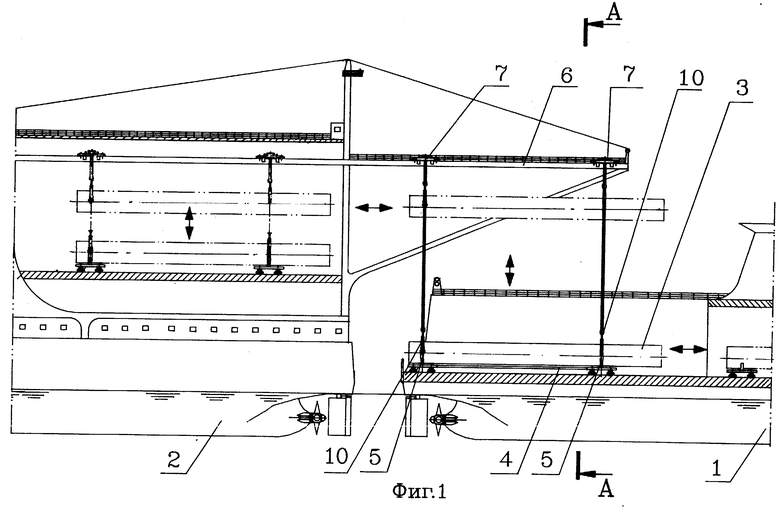
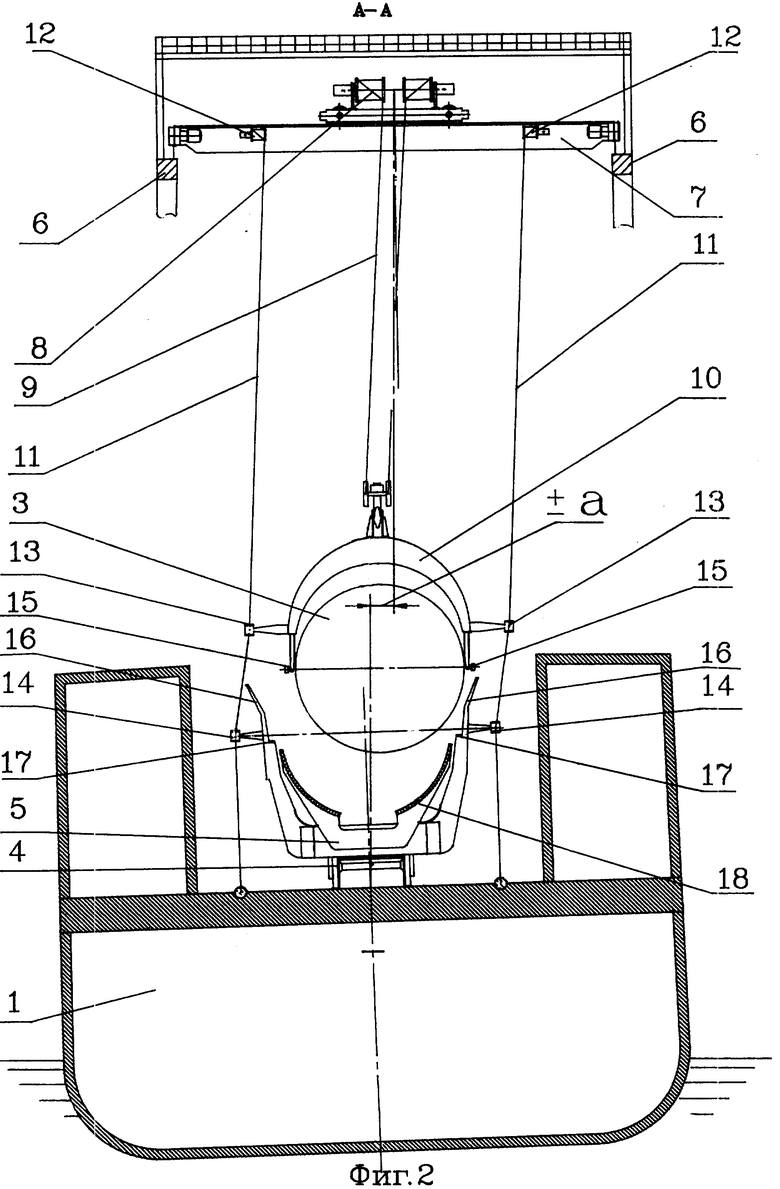
На фиг. 1 схематично изображена система передачи длинномерного груза с одного судна на другое, продольный вид; на фиг. 2 - сечение по А-А на фиг. 1 (в момент укладкигруза).
Система содержит судно снабжения 1 и принимающее судно 2, на которых размещается груз 3. На палубе судна 1 установлен транспортер 4 с опорами 5, на которых груз 3 транспортируется от места хранения к месту перегрузки.
Судно 2 оборудовано приемной консолью 6, на которой установлены две самоходные грузовые тележки 7, выполненные по типу мостовых кранов, имеющих поперечное перемещение механизмов подъема 8 и грузовых подвесок 9, на которые навешены траверсы 10. Каждая из тележек оснащена двумя направляющими канатами 11, сходящих с тележек по вертикали и стыкуемых с палубой судна 1. Механизмы 12 обеспечивают подачу канатов 11 и создают постоянное натяжение в них после пристыковки к палубе судна 2.
За канаты 11 захватываются траверсы 10 своими узлами 13, а также опоры 5 транспортера 4 своими узлами 14.
На траверсах 10 имеются бугели 15, которые взаимодействуют с ловителяими 16 опор 5 транспортера 4. Ловители 16 имеют зону захвата бугелей 15 траверс 10 с учетом возможных рассогласований ±a положений судов от их угловых и линейных перемещений. На транспортере 4 ловители 16 для бугелей 15 траверс 10 и опоры 5 для груза 3 снабжены соответствующими амортизационными элементами 17 и 18.
Работа системы осуществляется следующим образом.
Два судна (судно снабжения 1 и принимающее судно 2), имеющие разные рабочие уровни для размещения на них груза 3, устанавливаются в кильваторе друг за другом, при этом приемная консоль 6 судна 2 располагается над палубой 1 по ее оси.
При передаче груз 3 выкатывается на опорах 5 транспортера 4 на трюме судна 1 и устанавливается на палубе в отведенном исходном положении.
В соответствии с исходным положением груза 3 по приемной консоли 6 судна 2, имеющего более высокий рабочий уровень для груза 3, выкатываются и устанавливаются на отведенных местах тележки 7 с навешенными на их грузовые подвести 9 траверсами 10, которые своими узлами 13 захвачена на направляющие канаты 10, сходящих с тележки 7.
После этого канаты 11 с помощью механизмов 12 опускаются к палубе судна 1, стыкуются с ней и в них создается постоянное натяжение.
Затем опоры 5 транспортера 4 своими узлами 14 захватываются на направляющие канаты 11 и с помощью механизмов подъема 8 тележек 7 траверсы 10 опускаются по направляющим канатам 11 к грузу 3, находящемуся на опорах 5 транспортера 4.
При подходе к грузу 3 траверсы своими бугелями 15 заходят в ловители 16 опор 5 транспортера 4 и перемещаются по ним до упора бугелей 15 в амортизационные элементы 17 ловителей 16 и прослабления грузовых подвесок 9.
Этим создается обстановка отсутствия взаимных перемещений траверс 10 относительно груза 3, лежащего на опорах 5 транспортера 4, после чего производится безопасная стыковка траверс 10 с грузом 3.
После пристыковки траверс 10 производится съем груза 3 с опор 5 транспортера 4 механизмами подъема 8 тележек 7.
Амортизационные элементы 18 обеспечивают безударный съем груза 3 с опор 5 транспортера 4, а взаимодействующая система бугелей 15 и захватных узлов 13 траверс 10, ловителей 16 и захватных узлов 14 опор 5 транспортера 4, направляющих канатов 11 и тележек 7 - безопасный съем груза 3 с опор 5 транспортера 4 без их бокового соударения в условиях ветра и возможных взаимных перемещений судов.
После подъема груза 3 в верхнее положение, обеспечивающее возможность его дальнейшей передачи на судно 2, направляющие канаты 11 прослабляются, отстыковываются от палубы судна 1, выводятся из захватных узлов 14 опор 5 транспортера 4, поднимаются вверх механизмами 12 тележек 7, и груз 3 с помощью механизмов 12 тележки 7 перемещается и укладывается на отведенное место судна 2.
При выполнении перегрузочных операций в обратной последовательности аналогичным образом осуществляется передача груза 1 с судна 2 на судно.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПРЕИМУЩЕСТВЕННО ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ НА ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2012 |
|
RU2489307C1 |
| КОРАБЕЛЬНОЕ РАКЕТОЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1997 |
|
RU2121449C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2000 |
|
RU2176610C1 |
| ТРАНСПОРТЕР | 1997 |
|
RU2141906C1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2003 |
|
RU2240258C2 |
| ТОКОПОДВОД К САМОХОДНОМУ МЕХАНИЗМУ С ОГРАНИЧЕННОЙ ДЛИНОЙ ПЕРЕДВИЖЕНИЯ | 1996 |
|
RU2098341C1 |
| КОМПЛЕКТ УСТРОЙСТВ И СПОСОБ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ВЕРТИКАЛЬНУЮ ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2021 |
|
RU2791779C2 |
| Портальный кран | 1974 |
|
SU586095A1 |
| Устройство приема-передачи груза грузовой тележки судовой канатной дороги на принимающем судне | 2022 |
|
RU2788548C1 |
Сущность изобретения: система передачи груза включает в себя установленные на консоли принимающего судна две самоходные грузовые тележки, оснащенные механизмами подъема, грузовыми подвесками и направляющими канатами. На грузовые подвески навешены траверсы с бугелями и с узлами захвата направляющих канатов. На палубе судна снабжения размещен транспортер, снабженный опорами для груза, ловителями для взаимодействия с бугелями траверс и узлами захвата направляющих канатов. Это обеспечит безопасность работ и сохранность длинномерного груза от соударения в процессе перегрузки. 1 з.п.ф-лы, 2 ил.