Изобретение относится к автоматическому управлению и регулированию и может быть использовано при построении системы управления циклическими объектами с запаздыванием. От цикла к циклу объект характеризуется большими различиями уровней входных и выходных воздействий. Его функционирование осуществляется в условиях постоянно действующих возмущений, в том числе и неконтролируемых. Модель "внутреннего механизма" процесса, отображающая характер его протекания при различных условиях как внутри цикла, так и от цикла к циклу, отсутствует. Модель влияния приращений вектора входных воздействий Δ V (t) на приращения вектора выходных Δ Y (t) внутри j-го цикла представлена в виде ;
;
где
τ0 To, ko - постоянные параметры; t - время.
Размерность вектора Δ V(t) (число входных воздействий) равна m, а вектора Δ Y (t) - n, в частном случае n может быть равно единице.
Примером описанного класса объектов могут служить объекты прокатного производства, например нагревательный колодец. В частности, для нагревательного колодца в качестве Δ Yj (t) можно принять изменение температуры металла при его нагреве, а Δ Vj (t) - изменение расходов воздуха, топлива, калорийности топлива, массы металла в колодце и других. Условия протекания процесса нагрева металла от цикла к циклу существенно различаются, например, по температуре посада металла (от 0 до 800oC), массе металла в колодце ( от 5 до 10 слитков), заданной температуре нагрева металла (от 1250 до 1350oC). В соответствии с этим изменяются и уровни расхода топлива и воздуха.
Известен экстраполятор (см. авт. св. СССР N 842855, кл. G 06 G 7/30, 1980), содержащий апериодические фильтры, блок вычисления ошибки, блок умножения, блоки задержки, сумматоры, блоки деления, масштабирующие блоки, блоки вычитания и блоки коррекции.
В этом экстраполяторе с помощью апериодических фильтров определяется экспоненциально сглаженный сигнал первого и второго порядков, вычисляется отклонение сглаженного сигнала от его измеренного значения, сигнал о полученном отклонении также экспоненциально сглаживается, и суммированием сглаженных сигналов определяется экстраполированное значение сигнала. Постоянные времени апериодических фильтров поднастриваются с помощью блоков коррекции.
Недостаток экстраполятора заключается в низких функциональных возможностях, так как он не приспособлен для циклических процессов, а также в низкой точности экстраполяции из-за того, что не учитываются контролируемые внешние воздействия на объект.
Наиболее близким по технической сущности является адаптивный прогнозатор (см. авт. св. СССР N 104986, кл. G 05 B 13/00, 1983), содержащий последовательно соединенные сглаживающий фильтр, состоящий, например, из блока сравнения, интегратора и ограничителя, первый и второй блоки сравнения, модель объекта управления без запаздывания, реализованную, например, в виде последовательного соединения интегратора, охваченного отрицательной обратной связью, и масштабирующего блока, и первый блок задержки, последовательно соединенные третий и четвертый блоки сравнения, ограничитель, интегратор, второй блок задержки, пятый блок сравнения, первый масштабирующий блок и сумматор, второй масштабирующий блок и блок адаптации величины ограничивающего напряжения ограничителя и постоянной времени интегрирования интегратора, включающий, например, задатчики, блоки сравнения, масштабирующие блоки, инверторы, интеграторы, блоки умножения, блоки задержки, детекторы знака и сумматоры, причем второй вход первого блока сравнения соединен с входом сглаживающего фильтра, выход первого блока сравнения соединен с первым входом блока адаптации, первый выход которого соединен с вторым входом ограничителя, а второй выход блока адаптации соединен с вторым входом интегратора, выход первого блока задержки соединен с первым входом третьего блока сравнения, выход четвертого блока сравнения соединен с вторым входом блока адаптации, выход интегратора соединен с третьим входом блока адаптации, вторым входом четвертого блока сравнения, вторым входом пятого блока сравнения и вторым входом сумматора, выход модели объекта управления без запаздывания соединен с входом второго масштабирующего блока, выход которого соединен с третьим входом сумматора, выход которого является выходом адаптивного прогнозатора, вход сглаживающего фильтра является первым входом адаптивного прогнозатора, а второй вход третьего блока сравнения является вторым входом адаптивного прогнозатора.
В этом прогнозаторе из измеренного сигнала о входном воздействии объекта вычитается его сглаженная составляющая, полученное отклонение с помощью модели объекта без запаздывания преобразуется в сигнал приращения выходного воздействия. Сигнал приращения выходного воздействия после задержки на время запаздывания вычитается из сигнала о выходном воздействии. Таким образом сигнал о выходном воздействии расчетным путем приводится к опорному уровню (сглаженному значению) входного воздействия, что повышает точность экстраполяции выходного воздействия.
Выходной сигнал третьего блока сравнения сглаживается с помощью фильтра, состоящего из четвертого блока сравнения, ограничителя и интегратора. Величина ограничивающего напряжения ограничителя и постоянная времени интегрирования интегратора адаптируются с помощью блока адаптации по тpем показателям: по отклонению сигнала о приведенном значении выходного воздействия от его сглаженного значения; по скорости изменения сглаженного сигнала о приведенном значении выходного воздействия; по скорости изменения приращения сигнала об изменении входного воздействия.
Экстраполяция сглаженного сигнала о приведенном значении выходного воздействия осуществляется с учетом скорости его изменения на предыстории и реализуется с помощью цепочки, состоящей из второго блока задержки, пятого блока сравнения и первого масштабирующего блока. Сигнал о прогнозируемом значении выходного воздействия формируется на выходе сумматора и складывается из трех составляющих: сигнала о сглаженном значении приведенного выходного воздействия, сигнала, пропорционального изменению скорости сглаженного значения приведенного выходного воздействия и сигнала о величине приращения выходного воздействия, обусловленной приращением входного воздействия относительно его сглаженного значения, которые поступают соответственно на первый, второй и третий входы сумматора.
Недостаток известного адаптивного прогнозатора заключается в низких функциональных возможностях, так как он не приспособлен для циклических процессов, и в низкой точности прогнозирования, особенно на участках реализации сигнала с резкими изменениями уровня его полезной составляющей.
Задачей изобретения является повышение функциональных возможностей и точности прогнозирования выходного воздействия объекта.
Поставленная задача решается за счет того, что в адаптивный прогнозатор, содержащий сумматор, датчик сигнала входного воздействия, датчик сигнала выходного воздействия, последовательно включенные первый блок вычитания и модель объекта управления без запаздывания, последовательно включенные второй блок вычитания, первый блок задержки, третий блок вычитания и масштабирующий блок, второй блок задержки, выход масштабирующего блока соединен с первым входом сумматора, выход второго блока вычитания соединен с вторым входом третьего блока вычитания и с вторым входом сумматора, выход которого является выходом прогнозатора, дополнительно введены блок ввода аналоговых сигналов, блок памяти, блок ввода признаков и блок записи, хранения и воспроизведения характеристик типопредставительных ситуаций, первый выход которого соединен с третьим входом сумматора, а второй выход блока записи, хранения и воспроизведения характеристик типопредставительных ситуаций соединен с первым входом первого блока вычитания, выход модели объекта без запаздывания соединен с четвертым входом сумматора, выход прогнозатора соединен с входом второго блока задержки, выход которого соединен с первым входом второго блока вычитания, первый и второй входы блока памяти соединены соответственно с вторым входом первого блока вычитания и с вторым входом второго блока вычитания, а также с первым и вторым выходом блока ввода аналоговых сигналов, первый вход которого соединен с выходом датчика сигнала входного воздействия, а второй вход блока ввода аналоговых сигналов соединен с выходом датчика сигнала выходного воздействия, выход блока памяти соединен с первым входом блока записи, хранения и воспроизведения характеристик типопредставительных ситуаций, второй вход которого соединен с третьим входом блока памяти и с выходом блока ввода признаков, первый и второй входы которого являются первым и вторым входами прогнозатора, вход датчика сигнала входного воздействия является третьим входом прогнозатора, а вход датчика сигнала выходного воздействия - четвертым входом прогнозатора.
Введение дополнительных блоков обеспечивает возможность учета всех реализованных в прошлом и периодически повторяющихся от цикла к циклу условий протекания технологического процесса. Это позволяет приспособить прогнозатор к циклическим процессам и при отсутствии модели его "внутреннего механизма" использовать более простые модели типа (1), работающие в приращениях фактически измеренных входных и выходных воздействий относительно их значений, характеризующих типопредставительные ситуации (ТПС), и соответственно повышать точность прогнозирования за счет учета вариаций входных воздействий на данном цикле. Сравнение заявляемого решения с другими техническими решениями показывает, что отличительные от прототипа блоки используются по прямому назначению. Однако при их введении в указанной новой связи с остальными известными блоками адаптивного прогнозатора вышеуказанные блоки проявляют новые свойства, что позволяет использовать его для циклических процессов и приводит к повышению точности прогнозирования за счет учета новых, изменившихся условий протекания технологического процесса на следующем цикле. На основании этого можно сделать вывод о соответствии заявляемого решения критерию "существенные отличия".
Структурная схема прогнозатора дана на фиг. 1. Для упрощения схемы на фиг. 1 приведена структура прогнозатора с учетом лишь одного входного воздействия Vj (t). Учет большего числа входных воздействий не приведет к существенному изменению структуры прогнозатора, а лишь увеличит число датчиков сигнала входного воздействия и моделей каналов преобразования без запаздывания приращений входных воздействий объекта управления.
Прогнозатор содержит датчик 1 сигнала входного воздействия, датчик 2 сигнала выходного воздействия, блок 3 ввода аналоговых сигналов, блок 4 ввода признаков, блок 5 памяти, блок 6 записи, хранения и воспроизведения характеристик ТПС, первый блок 7 вычитания, модель 8 объекта управления без запаздывания, сумматор 9, второй блок 10 вычитания, первый блок 11 задержки, третий блок 12 сравнения, масштабирующий блок 13 и второй блок задержки 14.
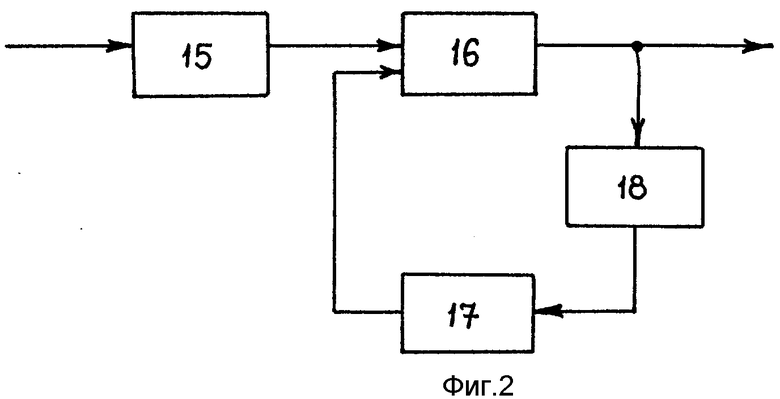
Блоки 1 и 2 представляют собой датчики сигналов V(t) и Y(t) соответственно. Например, блок 1 - датчик расхода газа, а блок 2 - датчик температуры металла. Датчик расхода газа представляет собой комплект, состоящий из стандартной диафрагмы типа ДК (см. В.С. Чистяков. Краткий справочник по теплотехническим измерениям. М.: Энергоатомиздат, 1990, табл. 3.2, с. 159-160) и измерительного преобразователя разности давлений типа "Сапфир 22ДД" (см. там же, табл. 1.11, с 57). Датчик температуры - пирометр полного излучения термоэлектрический "АПИРС-С" типа ППТ (см. К.И. Котов, М.А. Шершевер. Средства измерения, контроля и автоматизации технологических процессов. Вычислительная и микропроцессорная техника. М.: Металлургия, 1989, с. 122). Блок 3 ввода аналоговых сигналов, предназначенный для преобразования аналоговых сигналов V(t) и Y(t) в дискретные V(i) и Y(i), выполнен на базе модуля ввода аналоговых сигналов типа МВВА-1 (см. ЭВМ. Комплексирование и применение. /Под ред. Н. Л. Прохорова. М.: Финансы и статистика. 1986, с. 182). Блок 4 ввода признаков выполнен на базе модуля ручного ввода и представления технологической информации СМ9402 (см. Технические средства АСУ. Справочник. т.2. /Под общ. ред. Г. Б.Кезлинга. Л.: Машиностроение. 1980, с. 359-360). Блоки вычитания 7, 10, 12 выполнены по схеме вычитания (см. Е.А.Зельдин. Цифровые интегральные микросхемы в информационно-измерительной аппаратуре. Л.: Энергоатомиздат, 1986, с. 319, рис. 9.15). Сумматор 9 представляет собой три последовательно соединенных сумматора двух чисел, каждый из которых выполнен по схеме суммирования двух чисел (см. У.Титце, К.Шенк. Полупроводниковая схемотехника. М. : Мир, 1982, с.334, рис. 19.30). Масштабирующий блок 13 может быть реализован по схеме быстродействующего параллельного умножающего устройства (см. Справочник по интегральным микросхемам. Под ред. Б.В.Тарабрина. М. : Энергия, 1980, с. 757, рис. 5-272). Блоки 11 и 14 задержки на h тактов представляют собой 2h последовательно соединенных устройства задержки, функциональная схема которых одинакова и представлена тем же (с.751, рис. 5=263). Модель 8 объекта управления без запаздывания реализует без учета запаздывания (h=0) выражение следующего вида
ΔYj(i) = c1ΔYj(i-1)+c2ΔVj(i-h), (2)
где
h - дискретное запаздывание,
i - время;
C1 и C2 - постоянные коэффициенты, зависящие от свойств конкретного объекта управления.
Она является аналогом модели (1) (для случая m=1; n=1). Возможный вариант исполнения модели (2) представлен на фиг. 2.
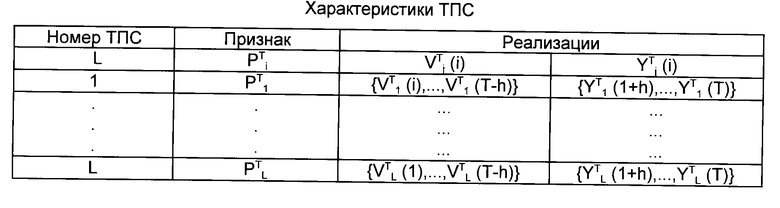
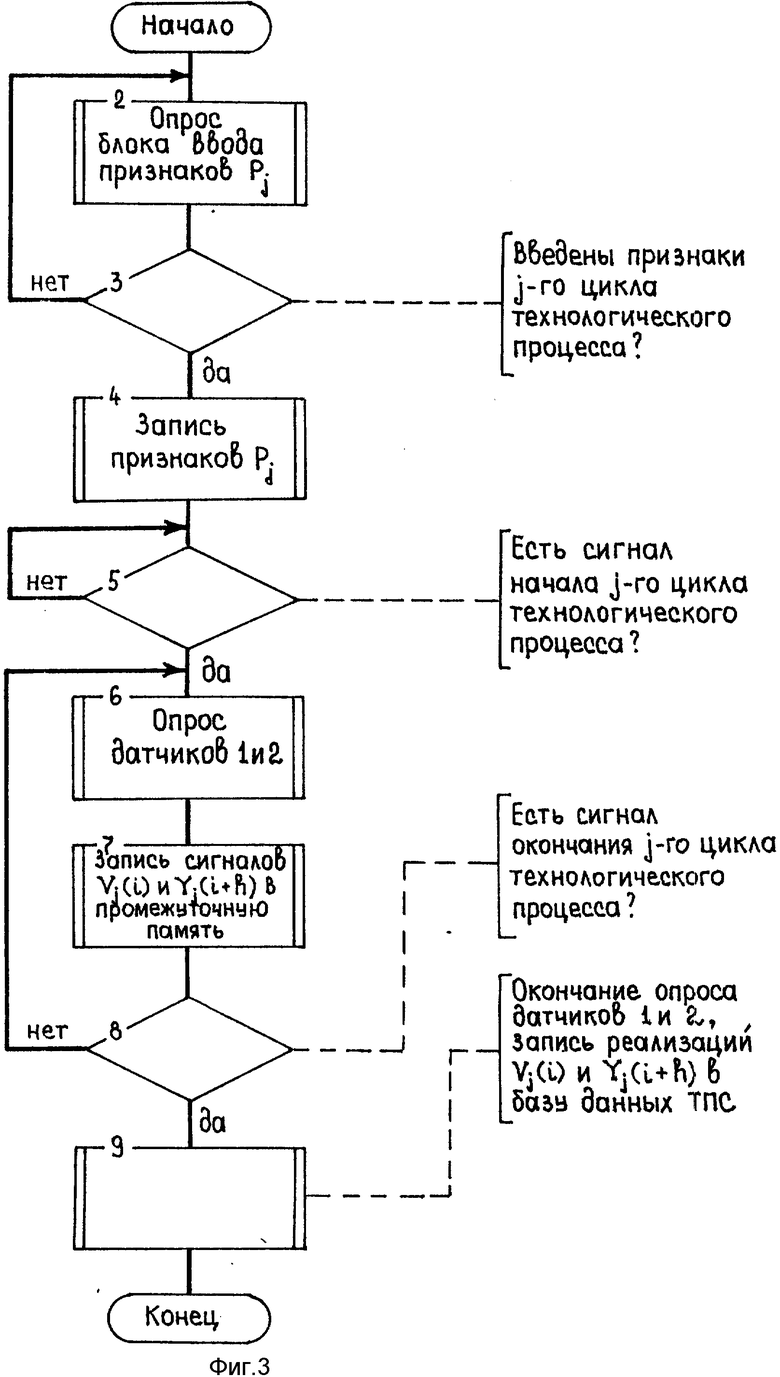
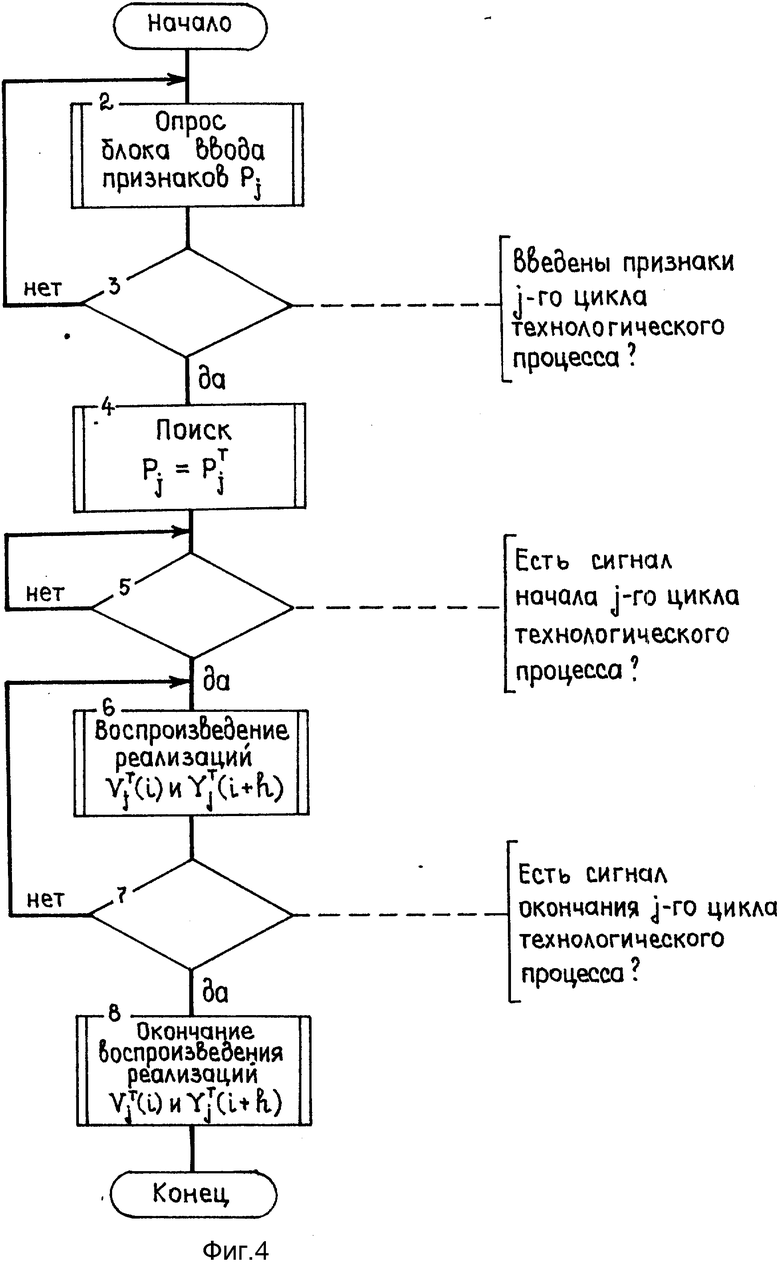
Блок 5 памяти выполнен на базе ЭВМ, реализующей совокупность программных модулей, обеспечивающих опрос датчиков сигналов входных Vj (t) и выходных Yj (t) воздействий и записи их реализаций за j-й цикл технологического процесса в промежуточную память и в базу данных ТПС. Структура алгоритма функционирования блока 5 памяти приведена на фиг. 3. Блок 6 записи, хранения и воспроизведения характеристик ТПС выполнен на базе ЭВМ, реализующей совокупность программных модулей опроса блока 4 ввода признаков Pj для j-го цикла технологического процесса, поиска признаков ТПС P
Прогнозатор работает следующим образом. Объект прогнозирования является циклическим с длительностью цикла T и характеризуется существенным различием в условиях протекания технологического процесса от цикла к циклу. Это различие отображается набором признаков, Pj = {Pj1,...,Pjk,...,PjK}, известных до начала i-го цикла.
Конкретные значения признаков P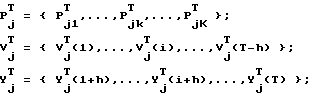
k = 1,...,K; i = 1,...,T-h;
где
k - число признаков, характеризующих условия протекания технологического процесса на каждом цикле;
T - длительность цикла (дискретное время);
h - дискретное запаздывание.
Индекс T воздействия V
Перед запуском прогнозатора с помощью блока 4 ввода признаков в блок 6 записи, хранения и воспроизведения характеристик ТПС вводятся значения признаков P
Перед началом j-го цикла технологического процесса становится известным набором признаков Pj, который характеризует начальные условия функционирования объекта управления на j-м цикле. Эти признаки с помощью блока 4 ввода признаков вводятся в блок 5 памяти и одновременно в блок 6 записи, хранения и воспроизведения характеристик ТПС. В соответствии с алгоритмом функционирования блока 5 памяти, структура которого представлена на фиг. 3, осуществляется запись этих признаков в промежуточную память. В соответствии с алгоритмом функционирования блока 6 записи, хранения и воспроизведения характеристик ТПС, блок-схема которого приведена на фиг. 4, осуществляется поиск такой ТПС, признаки которой P
После поступления инициативного сигнала Jj по второму входу блока 4 ввода признаков, который соответствует началу j-го цикла функционирования объекта, в соответствии с подпрограммой воспроизведения реализации V
Сигнал Vj (t) с выхода датчика 1 сигнала входного воздействия поступает на первый вход блока 3 ввода аналоговых сигналов, где преобразуется в дискретный сигнал Vj (i) и поступает на первый выход блока 3 ввода аналоговых сигналов. Аналогично происходит преобразование сигнала Yj (t) с выхода датчика 2 сигнала выходного воздействия, который поступает на второй вход блока 3 ввода аналоговых сигналов. На его втором выходе формируется сигнал Yj (i).
По инициативному сигналу Jj о начале j-го цикла начинается опрос с интервалом времени Δt первого и второго выходов блока 3 ввода аналоговых сигналов и в блок 5 памяти начинают поступать и записывать сигналы Vj (i) и Yj (i). Параллельно с этим сигнал Vj (i) поступает на второй вход первого блока 7 вычитания, а на второй вход второго блока 10 вычитания поступает сигнал Yj (i).
Сигнал V
Этот сигнал поступает на четвертый вход сумматора 9, где, суммируясь с сигналами, поступающими по первому, второму и третьему входам сумматора 9, формирует на его выходе сигнал, пропорциональный прогнозируемому значению выходного воздействия Yj (i+h):
Yj(i+h) = Y
Вторая составляющая этой суммы интерпретируется как реакция объекта управления на отклонение входного воздействия j-го текущего цикла по отношению к его изменению для типопредставительной ситуации.
Поскольку в течение j-го цикла технологического процесса на объект управления, помимо Vj (i), действуют неконтролируемые возмущения, то последняя составляющая приведенной в (3) суммы интерпретируется как экстраполированная оценка приведенного к выходу возмущения. Ее значение рассчитывается в соответствии с выражением:
где
S - интервал оценки скорости изменения сигнала δ Yj (i),
k - коэффициент, учитывающий помехозашумленность сигнала
Yj (i) и величину интервала прогнозирования; выбирается из диапазона (0-1).
Для реализации выражения (4) сигнал Yj (i+h) с выхода прогнозатора преобразуется с помощью второго блока 14 задержки на время s в сигнал Yj (i), который поступает на первый вход второго блока 10 вычитания, формируя на выходе последнего сигнала δ Yj (i)=Yj (i) - Yj (i). Для экстраполяции сигнала δ Yj (i) выходной сигнал второго блока 10 вычитания задерживается на интервал времени s в первом блоке 11 задержки и вычитается в третьем блоке 12 вычитания из сигнала δjY(i) . Сигнал о полученной разности умножается в масштабирующем блоке 13 на коэффициент kэ = k/s и суммируется в сумматоре 9 с сигналом δ Yj (i), поступающим в него по второму входу.
По окончании j-го цикла технологического процесса в соответствии с инициативным сигналом Jj прекращается опрос датчиков 1 сигнала входного воздействия и 2 сигнала выходного воздействия. Вместе с этим по сигналу Jj окончания j-го цикла в соответствии с подпрограммой записи реализации Vj (i) и Yj (i+h) в базу данных ТПС алгоритма функционирования блока 5 памяти осуществляется обновление строки таблицы базы данных ТПС, для которой Pj = P
Применение предлагаемого прогнозатора позволяет повысить точность прогнозирования выходных воздействий циклического объекта управления за счет учета с помощью характеристик ТПС существенных и резких изменений от цикла к циклу уровней входного Vj (i) и выходного Yj (i) воздействий. Так, например, результаты модельных испытаний прогнозатора показывают, что точность прогнозирования изменений температуры металла в процессе его нагрева в нагревательном колодце возросла в 1,2-1,5 раза по сравнению с прототипом за счет учета резких изменений от цикла к циклу температуры посада металла и его массы, если прототип использовать для циклического объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТОВ, НАПРИМЕР, ПРОКАТНОГО ПРОИЗВОДСТВА | 1996 |
|
RU2113003C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ | 2005 |
|
RU2295151C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2128358C1 |
| Система автоматического регулирования | 1988 |
|
SU1569802A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОНВЕРТЕРНОЙ ПЛАВКОЙ | 2004 |
|
RU2281337C2 |
| Система регулирования объектов высокого порядка с запаздыванием | 1989 |
|
SU1667002A1 |
| Адаптивный прогнозатор | 1982 |
|
SU1049866A1 |
| Устройство для моделирования систем управления | 1980 |
|
SU1092534A2 |
| СПОСОБ УПРАВЛЕНИЯ НАГРЕВОМ МЕТАЛЛА В ПЛАМЕННОЙ НАГРЕВАТЕЛЬНОЙ ПЕЧИ | 1994 |
|
RU2068006C1 |
| Система автоматического регулирования | 1987 |
|
SU1476433A1 |
Изобретение относится к автоматическому управлению и регулированию и может быть использовано при построении систем управления циклическими объектами с запаздыванием. Технический результат заключается в повышении точности прогнозирования выходных воздействий циклического объекта управления. Технический результат достигается за счет того, что прогнозатор содержит сумматор, датчик сигнала входного воздействия, датчик сигнала выходного воздействия, последовательно включенные первый блок вычитания и модель объекта управления без запаздывания, последовательно включенные второй блок вычитания, первый блок задержки, третий блок вычитания и масштабирующий блок, второй блок задержки. Выход масштабирующего блока соединен с первым входом сумматора, выход второго блока вычитания соединен с вторым входом третьего блока вычитания и с вторым входом сумматора, выход которого является выходом прогнозатора. 1 табл., 4 ил.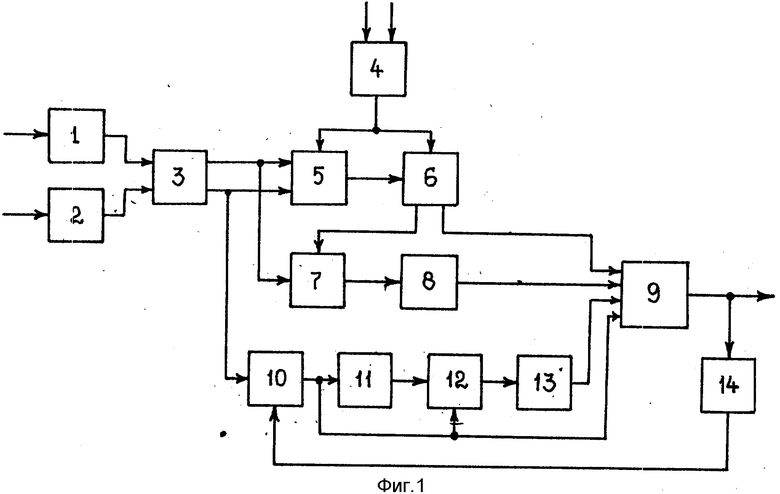
Прогнозатор, содержащий сумматор, датчик сигнала входного воздействия, датчик сигнала выходного воздействия, последовательно включенные первый блок вычитания и модель объекта управления без запаздывания, последовательно включенные второй блок вычитания, первый блок задержки, третий блок вычитания и масштабирующий блок, второй блок задержки, выход масштабирующего блока соединен с первым входом сумматора, выход второго блока вычитания соединен с вторым входом третьего блока вычитания и с вторым входом сумматора, выход которого является выходом прогнозатора, отличающийся тем, что в него введены блок ввода аналоговых сигналов, блок памяти, блок ввода признаков и блок записи, хранения и воспроизведения характеристик типопредставительных ситуаций, первый выход которого соединен с третьим входом сумматора, а второй выход блока записи, хранения и воспроизведения характеристик типопредставительных ситуаций соединен с первым входом первого блока вычитания, выход модели объекта управления без запаздывания соединен с четвертым входом сумматора, выход прогнозатора соединен с входом второго блока задержки, выход которого соединен с первым входом второго блока вычитания, первый и второй входы блока памяти соединены соответственно с вторым входом первого блока вычитания и с вторым входом второго блока вычитания, а также с первым и вторым выходами блока ввода аналоговых сигналов, первый вход которого соединен с выходом датчика сигнала входного воздействия, а второй вход блока ввода аналоговых сигналов соединен с выходом датчика сигнала выходного воздействия, выход блока памяти соединен с первым входом блока записи, хранения и воспроизведения характеристик типопредставительных ситуаций, второй вход которого соединен с третьим входом блока памяти и с выходом блока ввода признаков, первый и второй входы которого являются первым и вторым входами прогнозатора, вход датчика сигнала входного воздействия является третьим входом прогнозатора, а вход датчика сигнала выходного воздействия - четвертым входом прогнозатора.
