Изобретение относится к области автоматического управления и регулирования и может быть использовано для построения систем управления техническими объектами, содержащими значительные запаздывания в каналах управления и подверженными влиянию неконтролируемых возмущений и изменяющихся по произвольному закону задающих воздействий. Предполагается, что динамика объекта описывается передаточной функцией  в которой L(S) и M(S) - полиномы от S, причем степень полинома L(S) не превышает степень полинома M(S); τ - время транспортного запаздывания. Такого рода системы могут быть использованы при управлении техническими объектами с большими транспортными запаздываниями, в частности объектами, содержащими транспортные конвейеры, отдельные участки производства, взаимосвязанные по сырью и полупродуктам, а также в целом предприятиями с выходом на технико-экономические показатели, которые, как правило, оцениваются с существенной задержкой по отношению к времени производства продукции.
в которой L(S) и M(S) - полиномы от S, причем степень полинома L(S) не превышает степень полинома M(S); τ - время транспортного запаздывания. Такого рода системы могут быть использованы при управлении техническими объектами с большими транспортными запаздываниями, в частности объектами, содержащими транспортные конвейеры, отдельные участки производства, взаимосвязанные по сырью и полупродуктам, а также в целом предприятиями с выходом на технико-экономические показатели, которые, как правило, оцениваются с существенной задержкой по отношению к времени производства продукции.
Известна разомкнуто-замкнутая система регулирования (см. книгу: Я.З. Цыпкин. Основы теории автоматических систем, М.: Наука, 1977, с.81, рис. 6.6), содержащая последовательно соединенные блок сравнения, регулятор, сумматор и объект управления, выход которого соединен с вычитающим входом блока сравнения, другой вход которого соединен с входом корректирующего регулятора, подключенного своим выходом к второму входу сумматора, причем на вход корректирующего регулятора и блока сравнения поступает задающее воздействие, а выход объекта является регулируемой выходной величиной.
Недостаток этой системы заключается в низкой точности применительно к объектам, содержащим значительные запаздывания в каналах управления.
Наиболее близким к предлагаемому техническому решению является регулятор (см. а.с. СССР N 855607, кл. C 05 B 13/02, заявл. 04.02.80), содержащий последовательно соединенные сумматор, первый блок сравнения, фильтр низкой частоты, пропорционально-интегральный блок регулирования, второй блок сравнения и модель объекта управления без запаздывания, подключенную своим выходом к входу сумматора, последовательно соединенные экстраполятор и блок задержки, причем вход экстраполятора соединен с выходом пропорционально-интегрального блока регулирования, выход блока задержки подключен к второму входу второго блока сравнения, на второй вход сумматора поступает сигнал с выхода объекта управления о регулируемой выходной величине, на второй вход первого блока сравнения поступает сигнал о задающем воздействии, а сигнал с выхода экстраполятора является выходным сигналом регулятора, поступающим на объект управления. В этом регуляторе в модельно-замкнутом контуре, включающем модель объекта управления без запаздывания и пропорционально-интегральный блок регулирования, определяется образцовое управляющее воздействие для объекта без запаздывания, которое экстраполируется в последующем на интервал времени запаздывания.
Недостаток этого регулятора заключается в низкой точности регулирования из-за того, что, во-первых, пропорционально-интегральным блоком регулирования вырабатываются управляющие воздействия в ориентации на модельный, а не натурный выход объекта, которые могут значительно отличаться, а, во-вторых, не учитываются в явном виде изменения задающего воздействия.
Задача изобретения - повышение точности управления.
Поставленная задача достигается тем, что в систему автоматического управления, содержащую исполнительный блок, объект управления, первый и второй датчики, последовательно соединенные первый блок задержки, первый блок сравнения, первую модель объекта без запаздывания, первый сумматор, второй блок сравнения, первый регулирующий блок и первый экстраполятор, причем выход исполнительного блока через первый датчик соединен с входом первого блока задержки и с входом объекта управления, выход которого через второй датчик подключен к второму входу первого сумматора, выход первого регулирующего блока соединен с вторым входом первого блока сравнения, выход блока управления является выходом системы автоматического управления, а второй вход второго блока сравнения является входом системы по задающему воздействию и выход первого сумматора является модельным выходом системы, согласно изобретению введены второй сумматор, последовательно включенные второй экстраполятор, второй блок задержки, третий блок сравнения, четвертый блок сравнения, второй регулирующий блок, вторая модель объекта без запаздывания, пятый блок сравнения и третий регулирующий блок, подключенный своим выходом к первому входу второго сумматора, второй вход которого соединен с выходом первого экстраполятора, а выход - с входом исполнительного блока, вход системы по задающему воздействию соединен с входом второго экстраполятора и с вторым входом третьего блока сравнения, выход второй модели объекта без запаздывания соединен с вторым входом четвертого блока сравнения, выход первой модели объекта без запаздывания - с вторым входом пятого блока сравнения.
Проверка соответствия заявляемого технического решения требованиям новизны проводилась с учетом всех ранее опубликованных заявок.
Предлагаемая система автоматического управления выполнена на изобретательском уровне (введены новые блоки связи между ними) и достигнут новый технический результат: точность управления в предлагаемой системе автоматического управления повышается потому, что
- устраняется резкость между модельным и натурным выходными воздействиями за счет введения третьего регулирующего блока;
- учитываются в явном виде изменения задающего воздействия, с помощью блоков; последнее необходимо для того чтобы элиминировать влияние изменений задающего воздействия на функционирование третьего регулирующего блока, ибо последний воспринимает их как неконтролируемые возмущения.
На чертеже приведена блок-схема системы автоматического управления.
Система автоматического управления содержит объект 1 управления, исполнительный блок 2, первый 3 и второй 4 датчики, первый блок 5 задержки, первый блок 6 сравнения, первую модель 7 объекта без запаздывания, первый 8 и второй 9 сумматоры, третий регулирующий блок 10, пятый блок 11 сравнения, вторую модель 12 объекта без запаздывания, второй регулирующий блок 13, четвертый 14 и третий 15 блоки сравнения, второй блок 16 задержки, второй 17 и первый 18 экстраполяторы, первый регулирующий блок 19, второй блок сравнения 20, корректирующий блок 21.
При использовании предлагаемой системы автоматического управления в промышленности для управления, в частности, поточно-транспортными системами, в качестве объекта 1 управления взят участок поточно-транспортной системы, содержащий транспортное звено и промежуточную емкость (см. например, книгу: А. Д. Ищенко. Статические и динамические свойства агломерационного процесса, М. : Металлургия, 1972, с.82, рис. 25). Задача управления - обеспечить изменяющийся требуемый запас материала в промежуточном бункере. Управляющее воздействие - расход транспортируемого материала. Управляемая выходная величина - запас (уровень, масса) материала в промежуточном бункере. Возмущающее воздействие процесса - изменения потребления материала из промежуточного бункера. Исполнительным блоком 2 может служить дозатор непрерывного действия (см., например, книгу: А.Д. Ищенко. Статические и динамические свойства агломерационного процесса, М. : Металлургия, 1972, с. 41, рис. 11), представляющий собой замкнутую систему автоматического регулирования. Управление дозатором осуществляется посредством сигнала о заданной величине расхода материала. Первый датчик 3 представляет собой, в частности, конвейерные весы (см. , например, Гроссман Н. Я. , Шнегров Г.Д. Автоматизированные системы взвешивания и дозирования. М.: Машиностроение, 1988, рис. 177, с. 254). Второй датчик 4 представляет собой, в частности, тензодатчик, сигнал которого пропорционален массе материала в промежуточном бункере (см., например, там же, рис. 59 на с. 96). По схемам монографии Тетельбаум И.Н., Шнейдер Ю.Р. Практика аналогового моделирования динамических систем. Справочное пособие, М.: Энергоатомиздат, 1987, реализованы первый 5 и второй 16 блоки задержки - схема 1.8.12 на с. 111; экстраполяторы 17, 18 в виде реального форсирующего звена - схема 1.2.12 на с. 62; первая 7 и вторая 12 модели объекта без запаздывания в виде интегратора - рис. 1.3, а. По схемам монографии Титце У., Шенк К. "Полупроводниковая схемотехника", М., "Мир", 1982, реализованы: первый 8 и второй 9 сумматоры - схема рис. 11.3 на с. 138; первый 6, второй: 10, третий 15, четвертый 14 и пятый 11 блоки сравнения - схема рис. 11.2 на с. 138; первый 19, второй 13 и третий 10 регулирующие блоки в виде регуляторов, реализующих пропорционально-интегральный закон регулирования - схема рис. 26.7 на с. 483. На чертеже обозначено: u - управляющее воздействие; ω - неконтролируемое возмущение; у - выходное воздействие (управляемая величина); δум - изменение модельного выходного воздействия; yм- модельное выходное воздействие; δук - корректирующее воздействие y*- задающее воздействие; uв- образцовое управляющее воздействие.
Работает система автоматического управления следующим образом.
Модельно-замкнутый контур управления, включающий первую модель 7 объекта управления и первый регулирующий блок 18, описывается оперативным соотношением
в котором S7(S), f19(S) - передаточные функции первой модели 7 объекта управления и первого регулирующего блока 19; ум, у*, ω - модельное выходное воздействие, задающее воздействие, приведенное неконтролируемое возмущение; S - оператор Лапласа.
Получаемое в этом контуре образцовое управляющее воздействие uв рассчитано на то, чтобы модельное выходное воздействие yM соответствовало задающему воздействию y*, причем, как видно из (1), модельный объект управления не содержит запаздывания. Другими словами, образцовое управляющее воздействие uв восстановлено с запаздыванием и поэтому для экстраполяции на текущий момент времени введен первый экстраполятор 18. Кроме того, для устранения разницы между модельным ум и натурным y выходными воздействиями в систему внесен третий регулирующий блок 10. Но это ведет к тому, что третий регулирующий блок воспринимает изменения задающих воздействий y* как неконтролируемые возмущения, что отрицательно сказывается на точности управления. Чтобы этого не происходило, из входного воздействия δум третьего регулирующего блока 10 исключаются эффекты изменения задающего воздействия y* с помощью корректирующего блока 21. Тогда операторное соотношение при адекватности модели объекта с выходом на натурное выходное воздействие принимаем вид
где S5(s), S7(s), f10(s), f18(s), f19(s) - передаточные функции блоков системы с соответствующим номером.
Как видно из (2) оператор S21(s) входит только в его первую часть, являющуюся передаточной функцией от у* к у. Поэтому характеристики y21(s) совершенно не сказываются на характеристиках реакции системы управления в ответ на возмущение.
Если принять
где S7(7)=S12(s); f19(s)=f13(s); S5(s)=S16(s); f18(s)=f17(s),
то первая часть (2) будет иметь вид
При S5(s)•f18(s) = 1 в предлагаемой системе обеспечивается высокое качество переходного процесса при изменениях задающего воздействия.
При f18(s) = 1 будет точное соответствие реакций CAP Смита.
При функционировании системы автоматического управления на выходах первого 3 и второго 4 датчиков формируются сигналы об измененных текущих значениях, соответственно, управляющего воздействия u(t) и выхода y(t). Сигнал u(t) с выхода первого датчика 3 поступает на вход первого блока 5 задержек. Сигнал y(t) с выхода второго датчика 4 поступает на второй вход первого сумматора 8 алгебраически суммируется с выходным сигналом δум(t) первой модели 7 объекта управления без запаздывания, в результате формируется выходной сигнал yм(t) модельного контура регулирования, который во втором блоке 20 сравнения вычитается из сигнала y*(t) задающего воздействия. Сигнал о полученной модельной ошибке регулирования с выхода второго блока 20 сравнения поступает на вход первого регулирующего блока 19, реализующего, в частности, пропорционально-интегральный закон регулирования. Восстановленный с запаздыванием выходной сигнал Uв(t-τ) первого регулирующего блока в первом блоке 6 сравнения сравнивается с сигналом U(t-τ) поступающим с выхода первого блока 5 задержки. Сигнал об отклонении Uв(t-τ) от U(t-τ) поступает с выхода первого блока 6 сравнения на вход первой модели 7 объекта управления без запаздывания, на выходе которой формируется сигнал δум(t) Первый регулирующий блок 19 реализует, в частности, пропорционально-интегральный закон регулирования и может быть настроен, например, согласно методике, изложенной в монографии: Каганов В. Ю. , Глинков Г.М. и др. Основы теории и элементы систем автоматического регулирования, М. : Металлургия, 1987, с. 219, в ориентации на объект без запаздывания. В результате функционирования модельного контура регулирования, состоящего из первого блока 6 сравнения, первой модели 7 объекта без запаздывания, первого сумматора 8, второго блока 20 сравнения и первого регулирующего блока 19 на выходе последнего формируется сигнал Uв(t-τ) расчетного управления, которое обеспечило бы компенсацию возмущения ω и получение y(t) = y*(t) если бы оно было реализовано в момент (t-τ) ) вместо фактического U(t-τ). Сигнал Uв(t-τ) с выхода первого регулирующего блока 19 поступает на вход первого экстраполятора 18, где экстраполируется на интервал времени τ запаздывания в объекте управления. Сигнал с выхода первого экстраполятора 18 подается через второй сумматор 9 на вход исполнительного блока 2, где преобразуется в управляющее воздействие объекта 1 управления.
Сигнал о задающем воздействии y* поступает в корректирующий блок 21, где сначала с помощью второго экстраполятора 17, второго блока задержки и третьего блока 15 сравнения формируется сигнал об ошибке экстраполяции задающего воздействия. Затем согласно выражения (3) определяется эффект этой ошибки, для чего выходной сигнал третьего блока 15 сравнения преобразуется в модельно-замкнутом контуре, включающем вторую модель 12 объекта без запаздывания, второй регулирующий блок 13 и четвертый блок 14 сравнения. Второй регулирующий блок 13 реализует этот же закон регулирования, с теми же настроечными коэффициентами, что и первый регулирующий блок 19.
Из выходного сигнала δум первой модели 7 объекта без запаздывания в пятом блоке 11 сравнения вычитается выходной сигнал второй модели 12 объекта без запаздывания и сигнал о полученной разности поступает на вход третьего регулирующего блока 10. В третьем регулирующем блоке 10 реализуется, в частности, пропорционально-интегральный закон регулирования. Его настроечные коэффициенты могут быть выбраны по методике, изложенной в указанной выше монографии Каганова В.Ю., Глинкова Г.М. и др. в ориентации на объект с запаздыванием τ. Выходной сигнал третьего регулирующего блока 10 суммируется во втором сумматоре 9 с выходным сигналом первого экстраполятора 18.
Таким образом, в предлагаемой системе автоматического управления благодаря введению новых блоков и связей повышается точность управления; эффективно компенсируются неконтролируемые возмущения и отрабатываются изменения задающего воздействия. При этом осуществлена "развязка" контуров следящего и стабилизирующего управления.
Для оценки эффективности предлагаемой системы автоматического управления проведены испытания модели этой системы и системы-прототипа. Испытания проводились для условий, когда объект управления обладает запаздыванием в канале регулирования и инерционностью или свойствами интегратора. Испытания показали, что для данного класса объектов применение предлагаемой системы обеспечивает повышение точности управления на 10-25% в сравнении с системой-прототипом.
Промышленная применимость.
Предлагаемое изобретение может быть использовано в построении систем управления металлургическими объектами, например, объектами коксохимического и доменного производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТОВ, НАПРИМЕР, ПРОКАТНОГО ПРОИЗВОДСТВА | 1996 |
|
RU2113003C1 |
| ПРОГНОЗАТОР | 1996 |
|
RU2113006C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| Регулятор | 1989 |
|
SU1789969A1 |
| Система управления | 1985 |
|
SU1285430A1 |
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
| Система регулирования объектов высокого порядка с запаздыванием | 1989 |
|
SU1667002A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Система автоматического регулирования | 1989 |
|
SU1640672A1 |
Использование: в технике автоматического управления и регулирования для построения системы управления техническими объектами, содержащими значительные запаздывания в каналах управления и подверженными влиянию неконтролируемых возмущений, изменяющихся по произвольному закону задающих воздействий. Сущность изобретения: система содержит исполнительный блок 2 объекта управления 1, датчик 3 управляющего воздействия, датчик 4 выходного воздействия, первый, второй блоки 5, 16 задержки, первый, второй, третий, четвертый, пятый блоки сравнения 6, 20, 15, 14, 11, первую, вторую модели 7, 12 объекта без запаздывания, первый, второй сумматоры 8, 9, первый, второй, третий регулирующие блоки 19, 13, 10, первый и второй экстраполяторы 18, 17. 1 ил.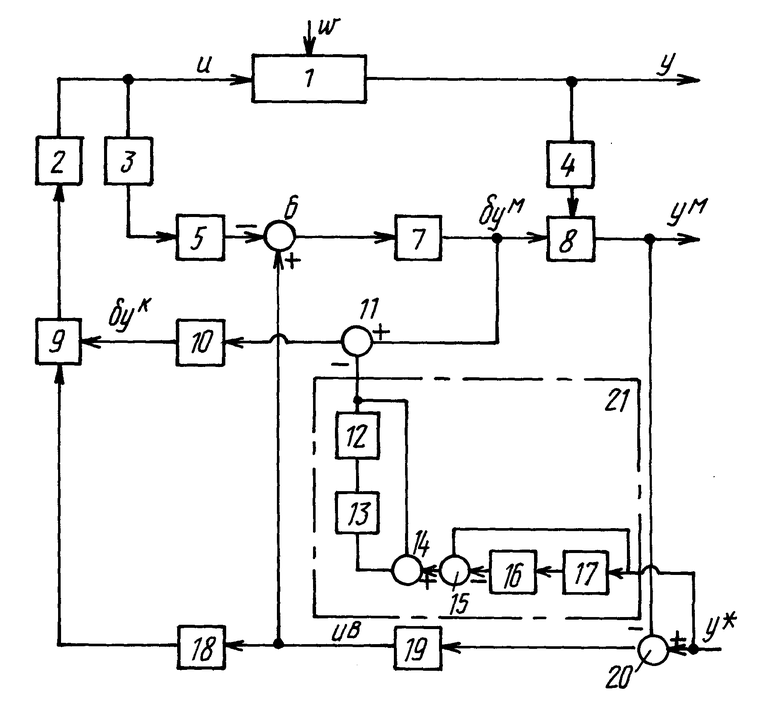
Система автоматического управления, содержащая датчик управления воздействия, связанный выходом через первый блок задержки с первым входом первого блока сравнения, соединенного выходом со входом первой модели объекта без запаздывания, подключенной выходом к первому входу первого сумматора, соединенного вторым входом с выходом датчика выходного воздействия, а выходом - с первым входом второго блока сравнения, второй вход которого является входом задающего воздействия системы, выход второго блока сравнения подключен к входу первого регулирующего блока, выход первого регулирующего блока подключен ко второму входу первого блока сравнения и ко входу первого экстраполятора, исполнительный элемент, отличающаяся тем, что в систему введения второй сумматор, второй блок задержки, третий, четвертый и пятый блоки сравнения, второй регулирующий блок, вторая модель объекта без запаздывания, третий регулирующий блок, второй экстраполятор, вход которого объединен со вторым входом второго блока сравнения и с первым входом третьего блока сравнения, а выход второго экстраполятора подключен через второй блок задержки ко второму входу третьего блока сравнения, соединенного выходом с первым входом четвертого блока сравнения, подключенного выходом ко входу второго регулирующего блока, связанного выходом со входом второй модели объекта без запаздывания, соединенной выходом со вторым входом четвертого блока сравнения и с первым входом пятого блока сравнения, подключенного вторым входом к выходу первой модели объекта без запаздывания, а выходом - ко входу третьего регулирующего блока, соединенного выходом с первым входом второго сумматора, подключенного вторым входом к выходу первого экстраполятора, а выходом - ко входу исполнительного элемента, выход которого объединен со входом датчика управляющего воздействия и является выходом системы, служащим для подключения входа управляющего воздействия объекта управления, вход датчика выходного воздействия является входом системы, служащим для подключения выхода объекта управления, выход первого сумматора является выходом модельного выходного воздействия системы.
| Регулятор | 1980 |
|
SU855607A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
