Изобретение относится к технике автоматического управления и регулирования и может быть использовано для испытаний управляющих и регулирующих систем, обладающих существенными нелинейностями и нестационарностями динамических характеристик.
Задачей изобретения является повышение точности моделирования.
Это достигается тем, что устройство для моделирования системы управления содержит блок моделирования коэффициента усиления и постоянной времени инерции, первый узел моделирования параметров объекта управления, первый, второй и третий масштабирующие элементы, первый и второй блоки вычитания, преобразователь угла поворота вала в напряжение, регулятор, усилитель и исполнительный механизм, блок моделирования коэффициента усиления и постоянной времени инерции содержит первый и второй фильтры низкой частоты, первый, второй, третий и четвертый масштабирующие элементы, первый и второй источники постоянного сигнала, первый и второй сумматоры, причем первые входы первого и второго сумматоров блока моделирования коэффициента усиления и постоянной времени инерции подключены к выходам первого и второго источников постоянного сигнала, второй и третий входы первого сумматора блока моделирования коэффициента усиления и постоянной времени инерции подключены к выходам первого и второго масштабирующих элементов этого же блока соответственно, входы которых соединены с выходами одноименных фильтров низкой частоты блока моделирования коэффициента усиления и постоянной времени инерции, второй и третий входы второго сумматора этого же блока подключены к выходам третьего и четвертого масштабирующих элементов блока моделирования коэффициента усиления и постоянной времени инерции, входы которых соединены с выходами первого и второго фильтров низкой частоты того же блока соответственно, первый узел моделирования параметров объекта управления состоит из элемента задержки, блока умножения, блока вычитания, блока деления и интегратора, вход которого подключен к выходу блока деления, вход делимого которого соединен с выходом блока вычитания, вход вычитаемого которого подключен к выходу интегратора, вход уменьшаемого - к выходу блока умножения, первым входом соединенного с выходом элемента задержки, а вторым - с выходом первого сумматора блока моделирования коэффициента усиления и постоянной времени инерции, выход второго сумматора блока моделирования коэффициента усиления и постоянной времени инерции соединен с входом делителя блока деления первого узла моделирования параметров объекта управления, выход интегратора соединен с входом вычитаемого первого блока вычитания устройства, вход уменьшаемого которого подключен к выходу второго масштабирующего элемента и входу второго фильтра низкой частоты блока моделирования коэффициента усиления и постоянной времени инерции, входы первого и второго масштабирующих элементов являются первым и вторым информационными входами устройства соответственно, выход первого масштабирующего элемента подключен к входу первого фильтра низкой частоты блока моделирования коэффициента усиления и постоянной времени инерции и входу уменьшаемого второго блока вычитания, вход вычитаемого которого подключен к выходу преобразователя угла поворота вала в напряжение, вал которого соединен жесткой механической связью с выходом исполнительного механизма, вход которого подключен к выходу усилителя, вход усилителя соединен с выходом регулятора, вход задания закона регулирования которого является входом задания эталонного сигнала устройства, выход второго блока вычитания подключен к входу элемента задержки первого узла моделирования параметров объекта управления, выход третьего масштабирующего элемента соединен с информационным входом регулятора, также содержащий третий и четвертый блоки вычитания, второй и третий узлы моделирования параметров объекта управления, первый и второй блоки моделирования изменения коэффициента усиления, каждый из которых содержит фильтр низкой частоты, масштабирующий элемент и сумматор, а блок моделирования коэффициента усиления и постоянной времени инерции содержит третий фильтр низкой частоты и пятый масштабирующий элемент, выход которого подключен к четвертому входу первого сумматора блока моделирования коэффициента усиления и постоянной времени инерции, вход пятого масштабирующего элемента соединен с выходом третьего фильтра низкой частоты того же блока, вход которого подключен к выходу преобразователя угла поворота вала в напряжение, первый вход сумматора каждого блока моделирования изменения коэффициента усиления подключен к выходу масштабирующего элемента того же блока, входом соединенного с фильтром низкой частоты своего блока, вторые входы сумматоров первого и второго блоков моделирования изменения коэффициента усиления подключены к выходу первого сумматора блока моделирования коэффициента усиления и постоянной времени инерции, входы фильтров низкой частоты первого и второго блоков моделирования изменения коэффициента усиления подключены к выходам первого и третьего блоков вычитания соответственно, выходы сумматоров первого и второго блоков моделирования изменения коэффициента усиления соединены со вторыми входами блоков умножения второго и третьего узлов моделирования параметров объекта управления соответственно, вход элемента задержки каждого 1-го (где i=2, 3) узла моделирования параметров объекта управления подключен к выходу элемента задержки (i-1)-го узла моделирования параметров объекта управления, выходы интеграторов второго и третьего узлов моделирования параметров объекта управления подключены к входам вычитаемого третьего и четвертого блоков вычитания, входы уменьшаемого которых подключены к выходу второго масштабирующего элемента, выход четвертого блока вычитания соединен с входом третьего масштабирующего элемента, входы делителя блоков деления второго и третьего узлов моделирования параметров объекта управления подключены к выходу второго сумматора блока моделирования коэффициента усиления и постоянной времени инерции, а также содержит блок оценки типопредставительной ситуации на объекте и блок прогнозирования типопредставительной ситуации на объекте, второй вход блока оценки типопредставительной ситуации на объекте соединен с выходом первого, а третий - с выходом второго масштабирующих элементов, а четвертый вход является дополнительно введенным входом контролируемых внешних воздействий устройства, выход блока оценки типопредставительной ситуации на объекте соединен со входом блока прогнозирования типопредставительной ситуации на объекте, выход которого подключен к третьему входу регулятора.
Введение новых блоков и связей позволяет повысить качество адаптируемых коэффициентов за счет настройки модели в условиях предстоящего периода ее функционирования.
На чертеже представлена блок-схема описываемого устройства для моделирования системы управления.
Устройство для моделирования системы содержит блок 1 моделирования коэффициента усиления и постоянной времени инерции, первый 2, второй 3, третий 4 узлы моделирования параметров объекта управления, первый 5 и второй 6 блоки моделирования изменения коэффициента усиления, первый 7, второй 8 и третий 9 масштабирующие элементы, первый 10, второй 11, третий 12 и четвертый 13 блоки вычитания, регулятор 14, усилитель 15, исполнительный механизм 16, преобразователь 17 угла поворота вала в напряжение, блок оценки типопредставительной ситуации на объекте 38, блок прогнозирования типопредставительной ситуации на объекте 39, четвертый фильтр низкой частоты 40 и шестой масштабирующий элемент 41.
Блок 1 моделирования коэффициента усиления и постоянной времени инерции содержит первый 18, второй 19, третий 20, четвертый 21, пятый 22 масштабирующие элементы, первый 23 и второй 24 сумматоры, первый 25, второй 26 и третий 27 фильтры низкой частоты, первый 28 и второй 29 источники постоянного сигнала.
Каждый из узлов 2-4 моделирования параметров объекта управления состоит из элемента 30 задержки, блока 31 умножения, блока 32 вычитания, блока 33 деления, интегратора 34.
Каждый из блоков 5 и 6 моделирования изменения коэффициента усиления содержит фильтр 35 низкой частоты, масштабирующий элемент 36 и сумматор 37.
Работает устройство для моделирования системы управления следующим образом.
Регулятор 14 вырабатывает командный сигнал на регулирование Up как реакцию на модельный выход  и заданное значение Y* выхода объекта. Воздействие Up через усилитель 15 поступает в виде усиленного сигнала Up на исполнительный механизм 16, выходной вал которого связан с преобразователем 17, преобразующим угол поворота вала исполнительного механизма в электрический сигнал, величина которого соответствует моделируемой величине управляющего сигнала Uм объекта. Этот сигнал поступает на вход блока 11 вычитания. Сигнал Uм поступает также на вход фильтра 27 низкой частоты.
и заданное значение Y* выхода объекта. Воздействие Up через усилитель 15 поступает в виде усиленного сигнала Up на исполнительный механизм 16, выходной вал которого связан с преобразователем 17, преобразующим угол поворота вала исполнительного механизма в электрический сигнал, величина которого соответствует моделируемой величине управляющего сигнала Uм объекта. Этот сигнал поступает на вход блока 11 вычитания. Сигнал Uм поступает также на вход фильтра 27 низкой частоты.
На входе блока 11 вычитания коэффициент  усиления первой модели вычисляется разность δUм=Uн-Uм между натурным Uн и модельным Uм регулирующими воздействиями. Полученный сигнал δUм, проходя через элемент 30 задержки, где задерживается на время
усиления первой модели вычисляется разность δUм=Uн-Uм между натурным Uн и модельным Uм регулирующими воздействиями. Полученный сигнал δUм, проходя через элемент 30 задержки, где задерживается на время  запаздывания в объекте, через блок 31 умножения, где умножается на коэффициент усиления первой модели , проходит через блок 32 вычитания, где из него вычитается сигнал, поступающий с интегратора 34, через блок 33 деления, где он делится на величину Тм постоянной времени инерции модели, и интегрируется интегратором 34, охваченным вместе с блоком 33 деления отрицательной обратной связью. На выходе интегратора 34 в результате перечисленных преобразований формируется реакция
запаздывания в объекте, через блок 31 умножения, где умножается на коэффициент усиления первой модели , проходит через блок 32 вычитания, где из него вычитается сигнал, поступающий с интегратора 34, через блок 33 деления, где он делится на величину Тм постоянной времени инерции модели, и интегрируется интегратором 34, охваченным вместе с блоком 33 деления отрицательной обратной связью. На выходе интегратора 34 в результате перечисленных преобразований формируется реакция  первой модели на разность δUм. Этот процесс может быть описан следующим выражением:
первой модели на разность δUм. Этот процесс может быть описан следующим выражением:

где - реакция первой модели на входное воздействие δUм;
ТМ - постоянная времени инерции;
- коэффициент усиления первой модели;
τ0 - время запаздывания первой модели, эквивалентное запаздыванию объекта управления.
Сигнал поступает на вход блока 10 вычитания, на другой вход которого поступает сигнал Yн с масштабирующего элемента 8. Сигнал Yн представляет собой преобразованный в масштабирующем элементе 8 сигнал о значении выхода Y натурного управления. В блоке вычитания 10 вычисляется оценка модельного выхода  первой модели.
первой модели.
Коэффициенты первой модели определяются следующим образом.
Сигнал Uм, поступающий на вход фильтра 27 низкой частоты, сглаживается и поступает на вход масштабирующего элемента 22, где он умножается на постоянный коэффициент, например α3, и полученный сигнал  поступает на вход сумматора 23. На другие входы сумматора 23 поступают сигналы
поступает на вход сумматора 23. На другие входы сумматора 23 поступают сигналы  и
и  с выходов третьего и четвертого масштабирующих элементов 18 и 19 соответственно, и сигнал α0 с источника 28 постоянного сигнала. В сумматоре 23 рассчитывается значение коэффициента усиления первой модели в соответствии с выражением:
с выходов третьего и четвертого масштабирующих элементов 18 и 19 соответственно, и сигнал α0 с источника 28 постоянного сигнала. В сумматоре 23 рассчитывается значение коэффициента усиления первой модели в соответствии с выражением:
 ,
,
где  ,
,  - сглаженные значения натурного регулирующего воздействия UН и натурного выхода YН. Сигнал формируется фильтром 25 низкой частоты; сигнал формируется фильтром 26 низкой частоты; сигнал UМ формируется фильтром 27 низкой частоты.
- сглаженные значения натурного регулирующего воздействия UН и натурного выхода YН. Сигнал формируется фильтром 25 низкой частоты; сигнал формируется фильтром 26 низкой частоты; сигнал UМ формируется фильтром 27 низкой частоты.
Сигнал о значении коэффициента с сумматора 23 поступает на блок 31 умножения в составе узла 2 и используется при расчете реакции первой модели на воздействие δUм, а также на сумматоры 37 блоков 5 и 6, где используется для расчетов коэффициентов  и
и  усиления второй и третьей моделей.
усиления второй и третьей моделей.
Постоянная времени инерции Тм модели рассчитывается в сумматоре 24 по выражению:
 ,
,
где b0 - постоянный сигнал с источника 29 сигнала;
 - выходной сигнал масштабирующего элемента 20;
- выходной сигнал масштабирующего элемента 20;
 - выходной сигнал масштабирующего элемента 21;
- выходной сигнал масштабирующего элемента 21;
b1, b2 - коэффициенты масштабирования масштабирующих элементов 20 и 21;
,  - выходные сигналы фильтров 25 и 26 низкой частоты.
- выходные сигналы фильтров 25 и 26 низкой частоты.
С получением модельного выхода  уточняется коэффициент усиления модели и формируется модельный выход
уточняется коэффициент усиления модели и формируется модельный выход  с использованием уточненной оценки коэффициента
с использованием уточненной оценки коэффициента  усиления второй модели.
усиления второй модели.
Коэффициент  второй модели рассчитывается в сумматоре 37 по выражению:
второй модели рассчитывается в сумматоре 37 по выражению:
 ,
,
где  - сигнал с сумматора 23;
- сигнал с сумматора 23;
 - сигнал с масштабирующего элемента 36 блока 5, а С1 - масштабирующий коэффициент этого элемента;
- сигнал с масштабирующего элемента 36 блока 5, а С1 - масштабирующий коэффициент этого элемента;
 - сглаженный сигнал на выходе фильтра 35 блока 5.
- сглаженный сигнал на выходе фильтра 35 блока 5.
Для получения уточненного коэффициента усиления сигнал о модельном выходе с блока 10 вычитания сглаживается фильтром 35 блока 5 и поступает через масштабирующий элемент 36, где  умножается на постоянный коэффициент C1, на сумматор 37 блока 5, где суммируется с сигналом
умножается на постоянный коэффициент C1, на сумматор 37 блока 5, где суммируется с сигналом  с сумматора 23.
с сумматора 23.
Сигнал об уточненном значении коэффициента с сумматора 37 блока 5 поступает на блок 31 умножения узла 3.
На блок 33 деления узла 3 поступает сигнал с постоянной времени инерции Тм с сумматора 24.
На блок 31 умножения узла 3 через элемент 30 задержки узла 3 τр поступает также сигнал δUм с блока 30 τ задержки узла 2. Время задержки τр блока 30 τ задержки узла 3 выбирают таким, чтобы к моменту поступления сигнала δUм на блок 31 умножения узла 3 были завершены расчет коэффициента усиления второй модели и его ввод в блок 31 умножения узла 3.
Во второй модели формируется реакция  на входное воздействие первой δUм при новом значении коэффициента усиления . Выражение (1) для этого случая принимает вид:
на входное воздействие первой δUм при новом значении коэффициента усиления . Выражение (1) для этого случая принимает вид:

где - реакция второй модели на входное воздействие δUм;
Тм - постоянная времени инерции;
- коэффициент усиления второй модели;
τ0 - время запаздывания первой модели;
τр - время запаздывания второй модели, обеспечивающее задержку δUм на время выполнения расчетов в блоках первой модели.
Сигнал с интегратора 34 узла 3 поступает на блок 12 вычитания, где вычитается из сигнала Yн, поступающего с масштабирующего элемента 8. Так формируется оценка модельного выхода  второй модели.
второй модели.
Сигнал  используется для уточнения коэффициента
используется для уточнения коэффициента  усиления третьей модели. Расчет
усиления третьей модели. Расчет  происходит аналогично расчету
происходит аналогично расчету  по выражению:
по выражению:
 ,
,
где  - выходной сигнал сумматора 23;
- выходной сигнал сумматора 23;
 - выходной сигнал масштабирующего элемента 36 блока 6 с коэффициентом масштабирования С2;
- выходной сигнал масштабирующего элемента 36 блока 6 с коэффициентом масштабирования С2;
 - выход фильтра 35 блока 6.
- выход фильтра 35 блока 6.
Далее моделирование происходит аналогично моделированию с использованием первой и второй моделей.
Коэффициент усиления с сумматора 37 блока 6 поступает на блок 31 умножения узла 4, а сигнал о постоянной времени инерции Тм с сумматора 24 - на блок 33 деления узла 4.
На блок 31 умножения узла 4 поступает также через элемент 30 задержки узла 4 сигнал δUм с элемента 30 задержки узла 3. Время задержки τр элемента 30 задержки узла 4 выбирают равным времени Тр задержки элемента 30 задержки узла 3. За счет этого обеспечивается одновременное поступление сигналов δUм и на блок 31 умножения узла 4.
В третьей модели формируется реакция  на входное воздействие δUм при новом значении коэффициента усиления . Выражение (1) для этого случая принимает вид:
на входное воздействие δUм при новом значении коэффициента усиления . Выражение (1) для этого случая принимает вид:

где  - реакция третьей модели на входное воздействие δUм;
- реакция третьей модели на входное воздействие δUм;
- коэффициент усиления третьей модели.
Остальные обозначения в (3) те же, что в (1) и (2).
Сигнал  с интегратора 34 узла 4 поступает на блок 13 вычитания, где вычитается из сигнала Yн с масштабирующего элемента 8. Полученный результирующий сигнал разности
с интегратора 34 узла 4 поступает на блок 13 вычитания, где вычитается из сигнала Yн с масштабирующего элемента 8. Полученный результирующий сигнал разности  является оценкой модельного выхода третьей модели.
является оценкой модельного выхода третьей модели.
Сигнал  с блока 13 вычитания через масштабирующий элемент 9, предназначенный для согласования входного сигнала регулятора с выходным сигналом блока 13 вычитания, поступает на автоматический регулятор 14 и моделирование продолжается по описанной выше схеме, пока не будет достигнута цель моделирования.
с блока 13 вычитания через масштабирующий элемент 9, предназначенный для согласования входного сигнала регулятора с выходным сигналом блока 13 вычитания, поступает на автоматический регулятор 14 и моделирование продолжается по описанной выше схеме, пока не будет достигнута цель моделирования.
Число моделей и соответствующих блоков настройки коэффициентов усиления определяется требуемой точностью моделирования и максимальным вероятным диапазоном отличий модельных регулирующих воздействий Uм от натурных Uн. При большем числе моделей, чем это показано на чертеже, устройство для моделирования системы управления выполняется и работает аналогичным образом.
Модельный выход  является результирующим выхода блока моделей устройства и показывает, что было бы на объекте управления, если бы взамен натурных регулирующих воздействий были реализованы регулирующие воздействия Up испытываемого и настраиваемого автоматического регулятора.
является результирующим выхода блока моделей устройства и показывает, что было бы на объекте управления, если бы взамен натурных регулирующих воздействий были реализованы регулирующие воздействия Up испытываемого и настраиваемого автоматического регулятора.
В общем случае формирование модельного выхода  любой j-й модели в составе устройства может быть описано выражением:
любой j-й модели в составе устройства может быть описано выражением:
 ,
,
где  находят путем решения следующих уравнений:
находят путем решения следующих уравнений:


 ,
,
где  - реакция j-й модели на входное воздействие δUм=Uм-Uм;
- реакция j-й модели на входное воздействие δUм=Uм-Uм;
Uн, Uм - преобразованные натурные и модельные регулирующие воздействия;
Yн - преобразованное значение натурного выхода;
Тм - постоянная времени инерции моделей;
 - коэффициент усиления j-й модели;
- коэффициент усиления j-й модели;
τ0, τр - время запаздывания моделей (для первой модели при j=1 произведение  из выражения (1) равно нулю);
из выражения (1) равно нулю);
b0, b1, b2 - коэффициенты для расчета Тм;
α0, α1, α2, сj-1 - коэффициенты для расчета .
Применение предлагаемого устройства для моделирования системы управления позволяет за счет более высокой точности результатов моделирования получать в ходе испытаний практически отлаженные управляющие системы, пригодные к работе в широком диапазоне изменения входов и выходов объекта управления и не требующие подстройки на натурном объекте.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГНОЗАТОР | 1996 |
|
RU2113006C1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Система автоматического регулирования | 1988 |
|
SU1569802A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТОВ, НАПРИМЕР, ПРОКАТНОГО ПРОИЗВОДСТВА | 1996 |
|
RU2113003C1 |
| РЕГУЛЯТОР | 2011 |
|
RU2448354C1 |
| Устройство для моделирования систем управления | 1980 |
|
SU1092534A2 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
Устройство для моделирования системы управления относится к технике автоматического управления и регулирования и может быть использовано для испытаний управляющих и регулирующих систем, обладающих существенными нелинейностями и нестационарностями динамических характеристик. Техническим результатом является повышение точности моделирования. Технический результат достигается за счет введения блоков оценки и прогнозирования типопредставительной ситуации на объекте, что позволяет повысить качество адаптируемых коэффициентов настройкой модели в условиях предстоящего периода ее функционирования. 1 ил.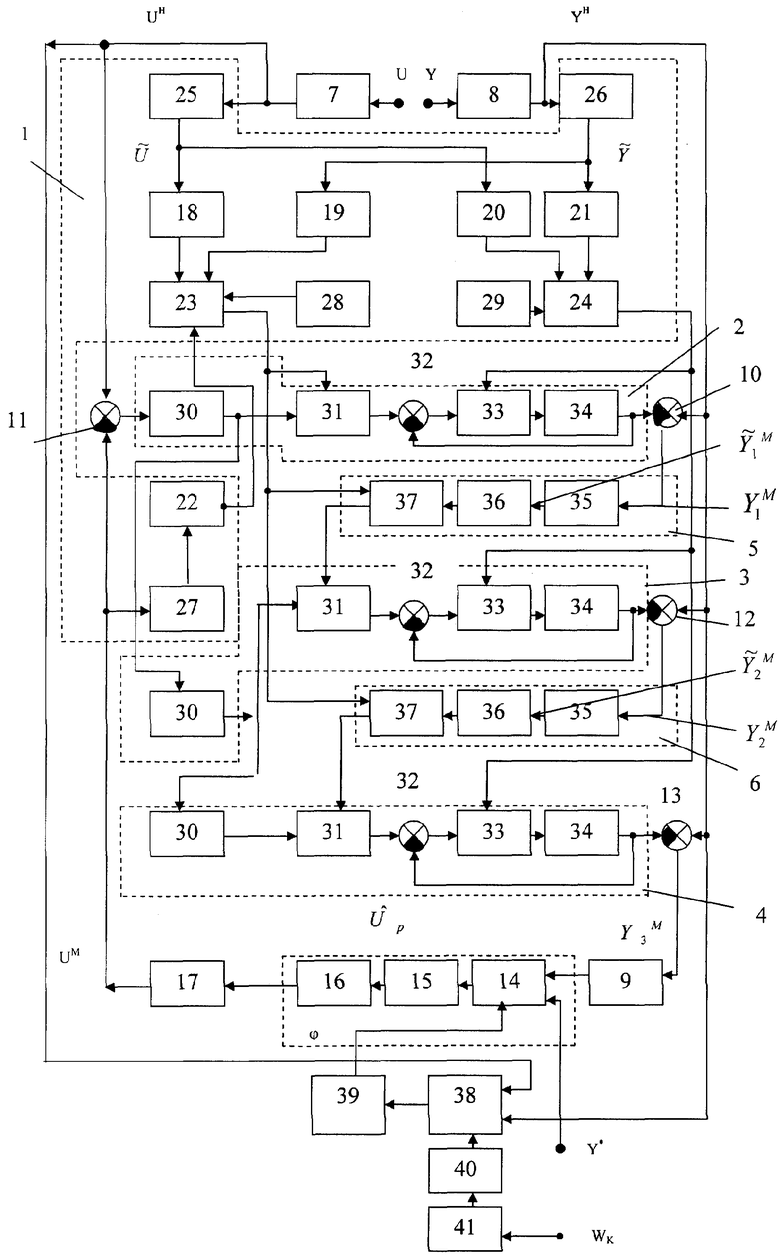
Устройство для моделирования системы управления, содержащее блок моделирования коэффициента усиления и постоянной времени инерции, первый узел моделирования параметров объекта управления, первый, второй и третий масштабирующие элементы, первый и второй блоки вычитания, преобразователь угла поворота вала в напряжение, регулятор, усилитель и исполнительный механизм, блок моделирования коэффициента усиления и постоянной времени инерции содержит первый и второй фильтры низкой частоты, первый, второй, третий и четвертый масштабирующие элементы, первый и второй источники постоянного сигнала, первый и второй сумматоры, причем первые входы первого и второго сумматоров блока моделирования коэффициента усиления и постоянной времени инерции подключены к выходам первого и второго источников постоянного сигнала, второй и третий входы первого сумматора блока моделирования коэффициента усиления и постоянной времени инерции подключены к выходам первого и второго масштабирующих элементов этого же блока соответственно, входы которых соединены с выходами одноименных фильтров низкой частоты блока моделирования коэффициента усиления и постоянной времени инерции, второй и третий входы второго сумматора этого же блока подключены к выходам третьего и четвертого масштабирующих элементов блока моделирования коэффициента усиления и постоянной времени инерции, входы которых соединены с выходами первого и второго фильтров низкой частоты того же блока соответственно, первый узел моделирования параметров объекта управления состоит из элемента задержки, блока умножения, блока вычитания, блока деления и интегратора, вход которого подключен к выходу блока деления, вход делимого которого соединен с выходом блока вычитания, вход вычитаемого которого подключен к выходу интегратора, вход уменьшаемого - к выходу блока умножения, первым входом соединенного с выходом элемента задержки, а вторым - с выходом первого сумматора блока моделирования коэффициента усиления и постоянной времени инерции, выход второго сумматора блока моделирования коэффициента усиления и постоянной времени инерции соединен с входом делителя блока деления первого узла моделирования параметров объекта управления, выход интегратора соединен с входом вычитаемого первого блока вычитания устройства, вход уменьшаемого которого подключен к выходу второго масштабирующего элемента и входу второго фильтра низкой частоты блока моделирования коэффициента усиления и постоянной времени инерции, входы первого и второго масштабирующих элементов являются первым и вторым информационными входами устройства соответственно, выход первого масштабирующего элемента подключен к входу первого фильтра низкой частоты блока моделирования коэффициента усиления и постоянной времени инерции и входу уменьшаемого второго блока вычитания, вход вычитаемого которого подключен к выходу преобразователя угла поворота вала в напряжение, вал которого соединен жесткой механической связью с выходом исполнительного механизма, вход которого подключен к выходу усилителя, вход усилителя соединен с выходом регулятора, вход задания закона регулирования которого является входом задания эталонного сигнала устройства, выход второго блока вычитания подключен к входу элемента задержки первого узла моделирования параметров объекта управления, выход третьего масштабирующего элемента соединен с информационным входом регулятора, также содержащий третий и четвертый блоки вычитания, второй и третий узлы моделирования параметров объекта управления, моделирование происходит аналогично моделированию с использованием первой и второй моделей, первый и второй блоки моделирования изменения коэффициента усиления, каждый из которых содержит фильтр низкой частоты, масштабирующий элемент и сумматор, а блок моделирования коэффициента усиления и постоянной времени инерции содержит третий фильтр низкой частоты и пятый масштабирующий элемент, выход которого подключен к четвертому входу первого сумматора блока моделирования коэффициента усиления и постоянной времени инерции, вход пятого масштабирующего элемента соединен с выходом третьего фильтра низкой частоты того же блока, вход которого подключен к выходу преобразователя угла поворота вала в напряжение, первый вход сумматора каждого блока моделирования изменения коэффициента усиления подключен к выходу масштабирующего элемента того же блока, входом соединенного с фильтром низкой частоты своего блока, вторые входы сумматоров первого и второго блоков моделирования изменения коэффициента усиления подключены к выходу первого сумматора блока моделирования коэффициента усиления и постоянной времени инерции, входы фильтров низкой частоты первого и второго блоков моделирования изменения коэффициента усиления подключены к выходам первого и третьего блоков вычитания соответственно, выходы сумматоров первого и второго блоков моделирования изменения коэффициента усиления соединены со вторыми входами блоков умножения второго и третьего узлов моделирования параметров объекта управления соответственно, вход элемента задержки каждого i-го (где i=2, 3) узла моделирования параметров объекта управления подключен к выходу элемента задержки (i-1)-го узла моделирования параметров объекта управления, выходы интеграторов второго и третьего узлов моделирования параметров объекта управления подключены к входам вычитаемого третьего и четвертого блоков вычитания, входы уменьшаемого которых подключены к выходу второго масштабирующего элемента, выход четвертого блока вычитания соединен с входом третьего масштабирующего элемента, входы делителя блоков деления второго и третьего узлов моделирования параметров объекта управления подключены к выходу второго сумматора блока моделирования коэффициента усиления и постоянной времени инерции, а также содержит блок оценки типопредставительной ситуации на объекте и блок прогнозирования типопредставительной ситуации на объекте соединен с выходом первого, а третий - с выходом второго масштабирующих элементов, а четвертый вход является дополнительно введенным входом контролируемых внешних воздействий устройства, выход блока оценки типопредставительной ситуации на объекте соединен с входом блока прогнозирования типопредставительной ситуации на объекте, выход которого подключен к третьему входу регулятора.
| Устройство для моделирования систем управления | 1980 |
|
SU1092534A2 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
| SU 1509952 А2, 23.09.1989 | |||
| Устройство для моделирования систем управления | 1980 |
|
SU935965A1 |
| EP 1455484 А2, 08.09.2004 | |||
| Мышляев Л.П | |||
| Прогнозирование в системах управления | |||
| Монография | |||
| Новокузнецк, 2002. | |||

