л-
1
Изобретение относится к технике автоматического регулирования и может быть использовано для управления объектами циклического действия, которые подвержены влиянию контролируе- мых и неконтролируемых возмущений. Неконтролируемые возмущения, действующие на объект регулирования, представлены аддитивными случайными процессами с медленно и быстроменяющи мися свойствами. Канал регулирования содержит запаздывание.
Примерами такого рода систем могу служить системы регулирования температуры слитков металла в нагреватель ных колодцах.
Цель изобретения - повышение точности регулирования и расширение функциональных возможностей системы автоматического регулирования.
На фиг. 1 и 2 изображена блок- схема системы автоматического регулирования.
На фиг. 1 и 2 приняты следую- щие обозначения: U - управляющее воздействие объекта управления; W - „контролируемое внешнее воздействие;
Т
Y, и УЙ соответственно первая и вторая регулируемые выходные пере-
Ю
5
25
30
15
20
менные объекта управления; Y и Y - заданные значения соответствующих регулируемых выходных переменных объекта; Т и Тр - соответственно базовая и расчетная длительность корректируемого периода рабочего цикла (или всего цикла); V - базовая скорость записи и воспроизведения в блоках записи и воспроизведения; VP - расчетная скорость записи и воспроизведения сигналов блоками записи-воспроизведения в корректируемый период, соответствующая расчетной длительности периода Тр; V - текущее значение скорости записи (воспроизведения); I - сигнал о начале очередного рабочего цикла технологического процесса. I
Система автоматического регулирования содержит объект 1 регулирования, исполнительное устройство 2, третий 3, второй 4, первый 5 и четвертый 6 датчики, первый задат- чик 7, первый сумматор 8, регулятор 9, первый блок 10 сравнения, третий блок 11 сравнения, первый блок 12 задержки, второй сумматор 13, обратную модель 14 объекта без запаздывания, фильтр 15 низкой частоты, . . программный задатчик 16, третий блок 17 задержки, четвертый блок 18 сравнения, первый масштабирующий блок 19, третий сумматор 20, третий масштабирующий блок 21, второй блок 22 задержки, второй масштабирующий блок 23, второй переключатель 24, состоящий из четвертого сумматора 25, тре- тьего 26 и четвертого 27 ключей, первый 28 и второй 29 блоки записи- воспроизведения, первый переключатель 30, состоящий- из первого 31 и второго.32 ключей, синхронизатор 33, состоящий из триггера 34, пятого ключа 35, пятого сумматора 36, 37 времени, седьмого ключа 38, шестого сумматора 39, таймера 40, второго блока 41 сравнения и шестого ключа 42, блок 43 управления длительностью рабочего цикла, состоящий из десятого сумматора 44, девятого 45 и восьмого 46 ключей, четвертого 47 и второго 48 задатчиков, четвертого мае- штабирующего блока 49, седьмого сумматора 50, пятого масштабирующего блока 51, восьмого сумматора 52, запоминающего блока 53, шестого блока 54 сравнения, шестого м асштабирующе- го блока 55, девятого сумматора 56, пятого блока 57 сравнения, седьмого масштабирующего блока 58 и третьего задатчика 59.
Объект 1 регулирования представляет собой, например, рекуперативный нагревательный колодец. Первой выходной регулируемой величиной 1 является, например, температура поверхности слитка, измеряемая в течение всего рабочего цикла. Второй регулируемой выходной величиной L является, например, показатель качества прогрева слитка за время рабочего цикла, измеряемый для каждого цикла однократно по его окончании. Таким показателем может служить температура раската. Управляющим воздействием U является расход топлива (в частности, газа) на обогрев ячейки колод ца. В качестве контролируемого внешнего воздействия W можно рассматривать, например, температуру воздуха (или газа), подаваемого на сжигание, после рекуператора.
Сообразно оговоренному примеру объекта регулирования приводятся и примеры технической реализации исполнительного устройства и датчиков.
..-
JQ15 2025-JQ
.« 45
35
Система автоматического регулирования работает следующим образом.
В синхронизаторе 33 по сигналу I о начале очередного рабочего цикла технологического процесса происходит очередное опрокидывание триггера 34, т.е. в очередной раз производится смена величин сигналов на выходах триггера. Например, на текущем цикле выходной сигнал, отличный от нуля, формируется на первом выходе триггера 34 и поступает через пятый ключ 35 на вход третьего сумматора 3f. На последующем цикле
триггер 34 вновь опрокинется и сигнал появится уже на втором его выходе и через седьмой ключ 38 поступит на второй вход пятого сумматора 36. В результате в течение каждого цикла на выходе одного из ключей 35 или 38 и на выходе пятого сумматора 36 постоянно присутствует сигнал, отличный от нуля. Одновременно в начале рабочего цикла по сигналу I осуществляется запуск реле 37 времени, на выходе которого формируется сигнал, поддерживаемый на постоянном уровне в течение времени, соответствующего длительности начального периода технологического процесса (например, периоду нагрева слитков в колодце). По этому сигналу останавливается таймер 40 и одновременно сигналом I в таймере задаются нулевые начальные условия. Сигнал на выходе таймера 40 в этом период равен нулю. Одноврег- менно сигнал с выхода реле 37 времени поступает через шестой сумматор 39 на управляющие входы пятого 35 и седьмого 38 ключей, замыкая их и пропуская сигналы с выходов триггера 34 на входы пятого сумматора 36. В то же время этот сигнал запирает шестой ключ 42, не пропуская сигнал с выхода второго блока 41 сравнения на второй вход шестого сумматора 39. По истечении времени, соответствующего длительности начального периода, сигнал на выходе реле 37 времени исчезает, происходит запуск таймера, замыкается шестой ключ 42. Сигнал Т с выхода таймера 40 во втором блоке 41 сравнения вычитается из сигнала о расчетной величине Тр длительности второго периода процесса (в частности, периода томления слитков). Сигнал о полученной разности через уже замкнутый шестой ключ 42 и через
шестой сумматор 39 поступает на управляющие входы пятого 35 и седьмого 38 ключей, И пока выполняется условие Т Тр - текущий цикл техно- - логического процесса продолжается, ключи 35 и 38 замкнуты. В противном случае эти ключи размыкаются и оче-. редкой цикл работы системы автоматического регулирования заканчивается. Таким образом, с началом каждого рабочего цикла технологического процесса формируется и в течение всего интервала длительности этого цикла поддерживается на выходе пятого 35 или седьмого 38 ключа (поочередно) управляющий сигнал. Одновременно на выходе пятого сумматора 36 также формируется и поддерживается в течение всего рабочего цикла управляющий сигнал.
Управляющий сигнал с выхода пятого сумматора 36 поступает на первый управляющий вход программного задат- чика 16. Одновременно управляющий сигнал (например, на нечетном по номеру цикла) поступает с выхода пятого ключа 35 на управляющие входы первого 31 и четвертого 27 ключей, на первый управляющий вход блока 29 записи- воспроизведения и на второй управляющий вход первого блока 28 записи- воспроизведения. По этим сигналам осуществляется запуск программного задатчика 16, второго блока 29 записи-воспроизведения в режиме воспроизведение и первого блока записи воспроизведения в режиме запись, первый 31 и четвертый 27 ключи замыкаются. На выходе программного задатчика 16 формируется сигнал Yf о задании на величину первой регулируемой переменной. Траектория изменения Y записана в программном задатчике и вопроизводится от цикла к циклу. При этом в случае необходимости изменения длительности рабочего цикла, воспроизводимая длина траектории Y может быть изменена путем изменения величины сигнала о требуемой скорости V записи и воспроизведения, поступающего на второй управляющий вход программного задатчика 16. Одновременно этот же сигнал V поступает на третьи управляющие входы первого 28 и второго 29 блоков записи-воспроизведения, скорость записи и воспроизведения сигналов на которых выдер- живается в соответствии с величиной
этого сигнала V. Одновременно замыкаются первьй 31 и четвертый 27 ключи. На выходе второго блока 29 записи-воспроизведения формируется сит- нал о текущей величине-V (t,i) базового управляющего воздействия, записанного в этот блок на предшествовавшем цикле работы системы. Этот сигнал поступает через четвертый
ключ 27 и четвертый сумматор 25 второго переключателя 24 на вход первого сумматора 8.
5 В то же время сигнал Yf (t) с выхода программного задатчика 16 поступает на вход первого блока 10 сравнения, где из него вычитается сигнал I(t,i) о текущем фактическом
о значении первой регулируемой выходной величины, на текущем 1-ом цикле работы системы, поступающий с выхода первого датчика 5, На выходе первого блока 10 сравнения фор5 мируется сигнал ошибки регулирования, равный
Ј,(t,i)I(t)-I; (t, i),
(1)
0
5
0
5
0
поступающий на вход регулятора 9, формирующего сигнал 4Uoc(t,i) корректировки базового управляющего воздействия U(t,i) по величине фактической ошибки регулирования, поступающий на другой вход первого сумматора 8. Одновременно изменяется текущее значение контролируемого внешнего воздействия на текущем i-ом цикле, сигнал W(t,i) о котором поступает с выхода третьего датчика 3 на вход третьего блока 11 сравнения, где из него вычитается сигнал W о базовой величине контролируемого внешнего воздействия, поступающий с выхода первого задатчика 7. Сигнал о полученной разности AW(t,i ) W(t,i)-W поступает на вход третьего масштабирующего блока 21, где умножается на коэффициент Kw.a пересчета AW в компенсирующие их корректировки Л Uw управляющего воздействия. Величина Kw-ц. определяется, наприК.1С-- У
Kw
5 коэффициента К ,,, усиления мддели канала регулирования, равного дп- -uYt , и коэффициента , усиления канала преобразования контролируемого возмущения, равного uW -Д Y, .
мер, как отношение Klv.lt
Сигнал о величине
/JlV(t,i)Kw-M. ./iW(t,i),
с выхода третьего масштабирующего блока 21 поступает на третий вход первого сумматора 8. В результате на выходе первого сумматора 8 формируется сигналtO
Vp(t,i)V (t,i)+dUoc(t,i) +
+ AUw(t.i),
(3)
иtO
четвертого блока 18 сравнения, где из него вычитается сигнал - f), i о реализованной в момент (t-i) корректировке управляющего воздействия по контрольному возмущению, поступающий с выхода третьего масштабирующего блока 21 через третий блок 17 задержки. В результате на выхдце четвертого блока 18 сравнения формируется сигнал восстановленного управляющего воздействия, приведенного к базовым условиям по контролируемому внешнему воздействию:



| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Регулирующее устройство | 1981 |
|
SU980069A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Двухканальная система управления | 1989 |
|
SU1656496A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
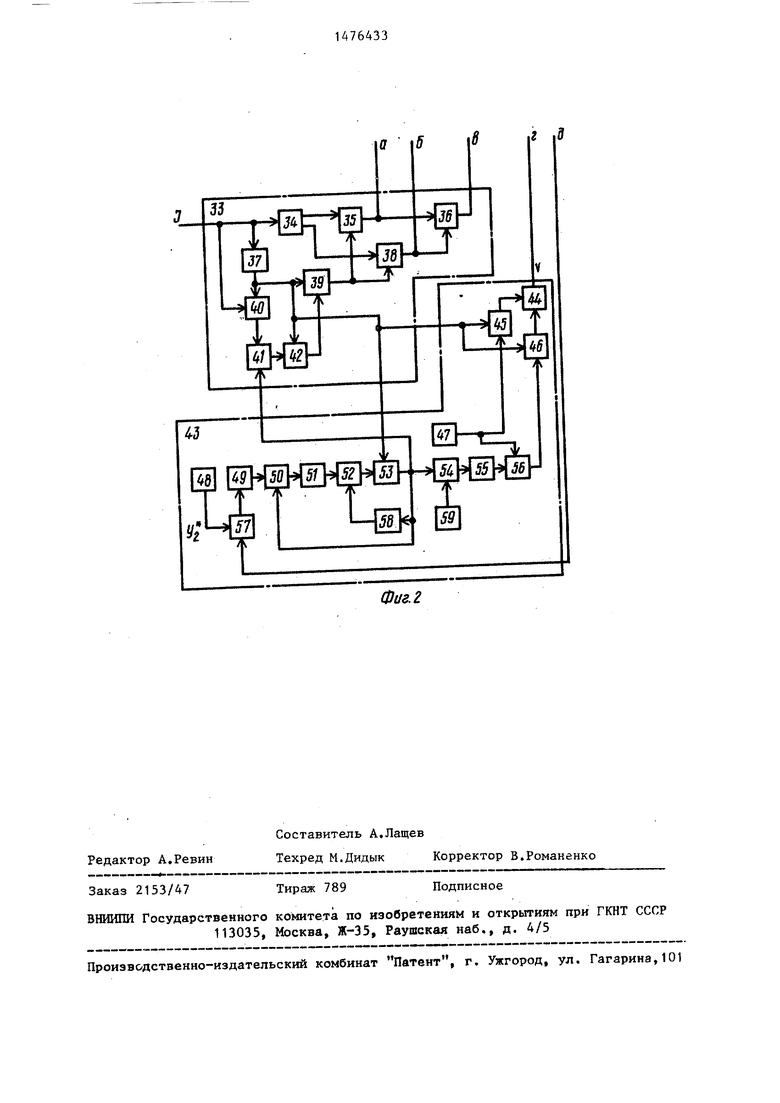
Изобретение может быть использовано для построения систем управления объектами циклического действия, обладающими большими запаздываниями и подверженными влиянию контролируемых и неконтролируемых возмущений. Изобретение позволяет повысить точность регулирования. Сущность изобретения заключается в том, что на каждом цикле работы объекта с запаздыванием оцениваются и экстраполируются на последующие циклы образцовые управляющие воздействия, обеспечивающие компенсацию неконтролируемых возмущений. При формировании управлений текущего цикла прогнозируемые образцовые управления корректируются с учетом текущих значений контролируемых возмущений и ошибок регулирования. Система автоматического регулирования объекта 1 регулирования содержит исполнительное устройство 2, третий 3, второй 4, первый 5 и четвертый 6 датчики, первый задатчик 7, первый сумматор 8, регулятор 9, первый 10 и третий 11 блоки сравнения, первый блок 12 задержки, второй сумматор 13, обратную модель 14 объекта без запаздывания, фильтр 15 низкой частоты, программный задатчик 16, третий блок 17 задержки, четвертый блок 18 сравнения, первый масштабирующий блок 19, третий сумматор 20, третий масштабирующий блок 21, второй блок 22 задержки, второй масштабирующий блок 23, второй переключатель 24, состоящий из четвертого сумматора 25 и третьего 26 и четвертого 27 ключей, первый 28 и второй 29 блоки записи-воспроизведения, первый переключатель 30, состоящий из первого 31 и второго 32 ключей, синхронизатор, состоящий из триггера, трех ключей, двух сумматоров, реле времени, таймера и блока сравнения, и блок управления длительностью рабочего цикла, состоящий из четырех сумматоров, двух ключей, трех задатчиков, четырех масштабирующих блоков, запоминающего блока 53 и двух блоков сравнения. 2 ил.
управления, поступающий через исполнительное устройство 2 на управляющий вход объекта 1 регулирования. Сигнал V(t,i) о фактически реализованном управляющем воздействии с выхода второго датчика 4 через первый блок 12 задержки, где задерживается на время, равное величине Г времени запаздывания в канале регулирования. Получаемый сигнал
vЈ(t-Ј),i с выхода первого блока 12 задержки поступает на вход второго сумматора 13, где суммируется с сигналом ЛИ f(t -Ј),i , формируемым в результате прохождения сигнала 6(t) с выхода первого блока 10 сравнения через фильтр 15 низкой частоты и .обратную модель 14 объекта без запаздывания. Фильтр 15 низкой частоты осуществляет подавление высокочас- тотных составляющих сигнала Ј(t,i), обусловленных, главным образом, влиянием помех измерения. Формируемый на выходе обратной модели 14 сигнал A UBC(t-f), i представляет коррек- тировку фактически реализованного управляющего воздействия vЈ(t-r),i. Получаемый на выходе второго сумматора 13 сигнал
),i Vf(t-.T),i +
+ uu (t-r),i3,
(4)
представляет собой восстановленное расчетным путем значение управляющего воздействия, которое будучи реализованным в момент времени (t-Г), обеспечило бы полную компенсацию всех возмущений процесса и получение нулевого значения текущей ошибки регулирования.
Сигнал V8r(t-), i с выхода второго сумматора 13 подается на вход
15
20 25
v ru-г), (1-т), i -auw(t-r), i,
(5)
изменения которого от цикла к циклу направлены на компенсацию эффектов неконтролируемых возмущений. Этот сигнал через первый масштабирующий Блок 19, где умножается на постоянный коэффициент 0 о( 1, поступает на вход третьего сумматора 20. В то же время сигнал V(t,i), о базовом управлении, записанный на предшествовавшем цикле работы системы во втором блоке 29 записи-воспроизведения, поступает с выхода второго переключателя через второй блок 22 задержки и второй масштабирующий блок 23 на другой вход третьего сумматора. Во втором блоке 22 задержки сигнал V (t,i) задерживается на время Ј запаздывания в канале регулирования. Полученный сигнал V Rt-Ъ), ij во втором масштабирующем блоке 23 умножается на постоянный коэффициент 0.$,/ 1. В результате суммирования на выходе третьего сумматора 20 формируется сигнал
(t-T),(i+i) un (t-),i +
+ V(t-), i,
(6)
базового управления для последующего цикла работы системы, поступающий через первый ключ 31 на вход первого блока 28 записи-воспроизведения, работающего в режиме запись. При выборе «I и Jb должно выполняться условие J. +,/5 1. Нетрудно видеть, что в этом случае формула (6) аналогична формуле экспоненциального сглаживания. Другими словами, в каждый текущий момент времени t текущего 1-го цикла, записываемое базовое управляющее воздействие для последующего цикла U(t- 0,(i+1 ) представляет собой экспоненциальное среднее значение оценок образцового управляющего воздействия на момент (t- ), полученных на текущем и предшествующих циклах. Глубина памяти сглаживателя (интервал усреднения) задается путем соответствующего подбора и / и выбирается, исходя из статистических свойств рядов:
unp Ct-t),i, unp(t-t),(i-i),
. UnP(t-t), (i-2),-. ,
при различных t. Свойства этих рядов определяются свойствами неконтролируемых возмущений объекта регулирования.
Поскольку на запись поступают управляющие воздействия U (t- Z) ( i;t, ., + 1 )}, смещенные в прошлое на время Т по отношению к текущему моменту t, то для устранения этого смещения воспроизведение записей базовых управлений в блоках 28 и 29 записи - воспроизведения начинается с момента времени, смещенного вперед на йнтервал t по отношению к моменту начала записи.
По окончании периода времени, отведенного на реализацию цикла с выхода синхронизатора 33, перестают поступать управляющие сигналы на управляющие входы программного за- датчика 16, первого 28 и второго 29 блоков записи-воспроизведения, первого и четвертого ключей,
Функционирование рассмотренной части системы прекращается. При поступлении вновь сигнала I о начале , очередного цикла технологического процесса весь описанный выше цикл работы рассмотренной части системы повторится с той лишь разницей, что замкнутся уже второй 32 и третий 26 ключи, первый блок 28 записи-воспроизведения будет работать в режиме воспроизведение, а второй блок 29 записи-воспроизведения будет работать в режиме запись.
По окончании очередного 1-го цикла работы системы осуществляется измерение второй регулируемой выходной величины I2(i) объекта регулирования, в частности, показателя качества прогрева слитков в нагревательном колодце. Сигнал о величине этого показателя поступает с выхода четвертого датчика 6 в блок 43 управления длительностью рабочего цикла на вход пятого блока 57 сравнения, где из него вычитается сигнал 1i о заданной величине этого показателя, поступающий с выхода второго задатчика 48. Сигнал о полученной разности
Ј4(1м; (D-Y
(7)
с выхода пятого блока 57 сравнения через четвертый масштабирующий блок 49 поступает на вход седьмого сумматора, где суммируется с сигналом о расчетной величине Tp(i) длительности корректируемого периода рабочего цикла. В четвертом масштабирующем блоке 49 сигнал (1) умножается на коэффициент пересчета ее в соответствующую корректировку длительности завершенного 1-го рабочего цикла:
4T(i)KT Ј2(i),
где KT - определяемый, например,
опытным путем коэффициент усиления модели, отражающей взаимосвязь между изменением длительности рабочего цикла (например, периода томления слитков в нагревательном колодце) и изменениями показателя неравномерности прогрева слитков.
В результате на выходе седьмого сумматора 50 формируется сигнал восстановленной образцовой величины
T(i) длительности корректируемого периода рабочего цикла, реализация- которой обеспечила бы для прошедшего 1-го цикла нулевую ошибку Јг (i)0. Сигнал Т (1) с выхода седьмого сумматора 50 через пятый масштабирующий0 блок 51 и через восьмой сумматор 52 поступает на вход запоминающего блока 53. В пятом масштабирующем блоке сигнал Т (i) умножается на постоянг
ный коэффициент 0 W, . 1 и полученный в результате сигнал в восьмом сумматоре 52 суммируется с расчетной величиной Tp(i) длительности корректируемого периода, определенной на
предшествующем цикле, поступающей с выхода запоминающего блока 53 через седьмой масштабирующий блок 58, где умножается на постоянный коэффициент 04Д Ј1.
При выборе V, няться условие , 1. Нетрудно видеть, что в этом случае сигнал на выходе восьмого сумматора 52 равен
Tp(i+1)1TB(i)+l/b(T,(i),
(8)
представляет собой результат экспоненциального сглаживания. Другими словами, расчетная длительность Tp(i+1) корректируемого периода для последующего (i+1)-ro цикла работы системы представляет собой экспоненциальное среднее значение оценок образцовых значений этой длительности, полученных на текущем и предшествующих циклах. Глубина памяти сглаживателя (интервал усреднения) задается путем соответствующего под- бора величин и j$( и выбирается, исходя из статистических свойств ряда
T8(i), Te(i-1), TB(i-2) ...
Свойства этого ряда определяются свойствами неконтролируемых возмущений объекта регулирования, оказывающих влияние на 12. На последующем (1+1)-ом цикле по окончании первого периода (в частности, периода нагрева) и при переходе к второму периоду длительность которого корректируется (в частности, период томления слитков) при снятии сигнала, на выходе реле 37 времени происходит запись сигнала 1(1+1) в запоминающий блок и с его выхода сигнал TP(i)
поступает в синхронизатор 33 на второй вход второго блока 41 сравнения, а также на вход шестого блока 54 сравнения, где из него вычитается сигнал Т о базовой величине длительности корректируемого периода рабочего цикла:
дТрШ Tp(i) - Т
(9)
и с выхода шестого блока 54 сравне- ния поступает на вход шестого масштабирующего блока 55, где происходит умножение dTp(i) на постоянный коэффициент Ку пересчета изменений длительность цикла в соответствующие изменения uV(i) скорости записи и воспроизведения сигналов программным задатчиком 16 и первым 28 и вторым 29 блоками записи-воспроизведения.
Полученный сигнал
aVp (i) К„ TP(i),
(10)
поступает с выхода шестого масштабирующего блока 55 на вход девятого сумматора 56, где суммируется с сигналом V о базовой величине скорости записи и воспроизведения сигналов, соответствующей базовой длительности Т корректируемого периода рабочего цикла. Полученный сигнал расчетной скорости Vp(i) записи- воспроизведения сигналов в корректируемый период рабочего цикла, равный
V (i) V + uVp(i),
(11)
поступает с выхода девятого сумматора 56 на информационный вход во.сьмо- го ключа 46. Одновременно сигнал V поступает с выхода четвертого задат- чика 47 на информационный вход девятого ключа 45. Сигналы с выхддов восьмого 46 и девятого 45 ключей подаются соответственно на первый и второй входы десятого сумматора 44. На управляющие входы этих ключей поступает сигнал с выхода реле 37 времени. В начальном периоде рабочего цикла, пока имеется сигнал на выходе реле 37 времени, восьмой ключ 46 разомкнут, а девятый ключ 45 замкнут, и сигнал V с выхода четвертого за- датчика 47 поступает через этот ключ на вход десятого сумматора 44. В результате в начальный период рабочего цикла (в частности, период нагрева слитков в нагревательном колодце) сигнал V(i) управления скоростью записи и воспроизведения, поступающий с -выхода десятого сумматора 44 на управляющие входы программного задатчика 16 и первого 28 и второго 29 блоков записи-воспроизведения, С наступлением второго периода процесса, длительность которого может корректироваться, сигнал на выходе реле 37 времени исчезает. В соответствии с этим девятый ключ 45
размыкается, а восьмой ключ 46 замыкается, пропуская через себя на вход десятого сумматора 44 и далее на управляющие вхдцы программного задатчика 16 и первого 28 и второго 29 блоков записи-воспроизведения сигнал V(i)Vp(i) расчетной для данного 1-го цикла скорости записи и воспроизведения, определенной в соответствии с рачетной длительностью корректируемого периода Tp(i), определенной для текущего цикла по окончании предшествующего. В результате происходит деформация во времени программы изменения I, (t,i) первого регулируемого выхода объекта регулирования в период с корректируемой длительностью (в частности, программы изменения температуры слитков в. нагревательном колодце в период томления) , За счет этого достигается устранение нарушений хода процесса, приводящих к отклонениям 1 от задания I (в частности, при нагреве слитков в нагревательных колодцах - устранение отклонений показателя неравномерности прогрева слитков от заданного уровня).
Для каждого последующего цикла работы системы автоматического регулирования описанная выше последовательность функционирования системы и ее элементов повторяется.
Таким образом, в системе автоматического регулирования на каждом цикле оцениваются с запаздыванием образцовые значения управляющих воздействий, реализация которых позволила бы компенсировать как контролируемые, так и неконтролируемые возмущения, влияющие на первый регулируемый выход объекта регулирования. Эти образцовые управления пересчитываются на базовые условия по контролируемому внешнему воздействию. Полученные приведенные значения управлений сглаживаются с учетом их применений на предшествующих циклах и используются в качестве базовых управлений на текущем цикле. При формировании текущих управлений на текущем цикле базового управления корректируются с учетом отклонений текущих значений контролируемого внешнего воздействия от базового значения. По окончании рабочего цикла оценивается фактическая величина второго регулируемого выхода и по отклонению ее от заданного уровня рассчитывается образцовая величина длительности второго (корректируемого) периода цикла. Реализация второго периода предшествующего цикла с образцовой длительностью позволила бы компенсировать возмущения, влияющие на второй регулируемый выход
объекта регулирования и получить его значение, равное заданному. Полученные образцовые значения дпительности корректируемого периода сглаживаются с учетом их изменений на предшествующих циклах. Полученное сглаженное значение используется для реализации
на последующем цикле, i
Формула изобретения
Система автоматического регулирования, содержащая последовательно
соединенные исполнительное устройство, объект рег.улирования, первый датчик, пе рвый блок сравнения, регулятор и первый сумматор, подключенный своим выходом к входу исполни- 0 тельного устройства, последовательно соединенные фильтр низкой частоты, обратная модель объекта без запаздывания и второй сумматор, последовательно соединенные первый масштабирующий блок и третий сумматор последовательно соединенные второй датчик и первый блок сравнения, последовательно соединенные второй блок задержки и второй масштабирующий
0 блок, первый и второй ключи, информационные входы которых соединены между собой, третий и четвертый ключи и четвертый сумматор, входы которого соединены с выходами третьего
5 и четвертого ключей, первый и второй записи-воспроизведения, программный задатчик, последовательно соединенные триггер, пятый ключ- и пятый сумматор, последовательно соединен0 ные реле времени, таймер, второй блок сравнения, шестой ключ, шестой сумматор и седьмой ключ, причем вход фильтра низкой частоты соединен с входом регулятора, входы реле време5 ни, триггера и второй вход таймера соединены между собой, второй выход триггера через седьмой ключ соединен с вторым входом пятого сумматора, с управляющими входами второго и
Q третьего ключей и с первым управляющим входом первого блока записи-воспроизведения, выход реле времени подключен к управляющему входу шестого ключа и к второму входу шестого
с сумматора, выход которого соединен с управляющим входом пятого ключа, подключенного своим выходом к управляющим входам первого и четвертого ключей, к первому управляющему входу
второго блока записи-воспроизведения и к третьему управляющему входу первого блока записи-воспроизведения, второй управляющий вход второго блока записи-воспроизведения соединен с первым управляющим входом первого блока записи-воспроизведения, выход первого ключа соединен с информационным входом первого блока запи- си-воспроизведения, подключенного своим выходом к информационному входу третьего ключа, выход второго ключа соединен с информационным входом второго блока записи-воспроизведения подключенного своим выходом к информационному входу четвертого ключа, информационные входы первого и второго ключей соединены с выходом третьего сумматора, второй вход кото- рого соединен с выходом второго масштабирующего блока, выход четвертого сумматора подключен к второму входу первого сумматора и к входу второго блока задержки, выход первого блока задержки соединен с вторым входом второго сумматора, вход второго датчика соединен с выходом исполнительного устройства, выход пятого сумматора соединен с первым входом прог раммного задатчика, подключенного своим выходом к второму входу первого блока сравнения, отличающаяся тем, что, с целью повышения точности регулирования, в сие- тему введены последовательно соединенные третий датчик, третий блок сравнения, третий масштабирующий ,. блок, третий блок задержки и четвертый блок сравнения, первый задатчик, подключенный своим выходом к второму входу третьего блока сравнения, четвертый датчик, последовательно соединенные второй задатчик, пятый блок сравнения, четвертый масштабирующий
блок, седьмой сумматор, пятый масштабирующий блок, восьмой сумматор, запоминающий блок, шестой блок сравнения, шестой масштабирующий блок, девятый сумматор, восьмой ключ, десятый сумматор, девятый ключ третий задатчик, четвертый задатчик и седьмой масштабирующий блок, соединенный своим входом с выходом запоминающего блока и с вторым входом седьмого сумматора, а выходом - с вторым входом восьмого сумматора, причем вход третьего датчика соединен с вторым входом объекта управления, выход четвертого датчика подключен к второму входу первого блока задержки, второй вход , второго блока сравнения соединен с выходом запоминающего блока, управляющие входы восьмого и девятого ключей и запоминающего блока соединены между собой, и подключены к выходу реле времени, второй управляющий вход программного задатчика и третьи управляющие входы первого и второго блоков записи-роспроизведе- ния соединены между собой и подключены к выходу десятого сумматора, трет тий вход первого сумматора соединен с выходом третьего масштабирующего блока, второй вход четвертого блока сравнения соединен с выходом второго сумматора, выход четвертого блока сравнения подключен к входу первого масштабирующего блока, вход четвертого датчика подключен к второму выходу объекта регулирования, выход девятого ключа соединен с вторым входом -десятого сумматора, выход третьего задатчика подключен к второму входу шестого блока сравнения, выход четвертого задатчика подключен к второму входу девятого сумматора и информационному входу девятого ключа.
Фиг. 2
| Авторское свидетельство СССР № 1300413, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
