Изобретение относится к грузоподъемным механизмам, а именно к манипуляторам для лесной промышленности, и может быть использовано как на лесозаготовительных машинах при валке, пакетировании и трелевке леса, так и на агрегатах для лесосплава для подъема затонувшей, полузатонувшей и плавающей древесины и ее пакетирования.
Известное устройство - кран-манипулятор на авт. N 484172 (кл. B 66 C 23/06, 13/42, приор. 08.07.69, опубл. 15.09.75), содержащее поворотную в вертикальной плоскости стрелу с рукоятью и захватным рабочим органом, их гидроприводы и систему управления, включающую трехпозиционный гидрораспределитель, кинематически связанный с тремя рычагами управления.
Известное устройство обеспечивает поочередное выполнение операций подъема и опускания захватного рабочего органа за счет поворота стрелы в вертикальной плоскости и перемещение его по одной координате, например, перемещение бревен по горизонтали для погрузки на эстакаду, транспортер и т.п., т. е. работает только в активном режиме (от руки оператора) с ограниченной степенью подвижности управляемых механизмов.
Известно устройство управления машиной манипуляторного типа по авт. св. N 701792 (кл. B 25 J 13/00, E 02 F 9/22, B 66 C 13/48, A 01 G 23/08, приор. 21.06.78, опубл. 05.12.79) - прототип. Известное устройство содержит шарнирно сочлененные поворотную колонну, стрелу с установленным на ней пантографным механизмом, рукоять, приводы их перемещения в виде гидроцилиндров, управляемых от гидрораспределителей, а именно двух трехпозиционных золотников, связанных с тремя рычагами управления, снабженными фиксаторами положений, кинематически также связанными с кулачком, установленным на поворотной колонне, с которым также связан пантографный механизм. Увеличение - уменьшение вылета стрелы, остановка его, остановка поворота колонны, операции выгрузки осуществляются оператором при помощи ручного управления рычагами, связанными с соответствующими гидрораспределителем. Настройкой определенного перекрытия по времени движений управляемых механизмов оператор может добиться плавного, без рывков переключения звеньев рабочего оборудования, что, соответственно, требует хорошей квалификации оператора.
Известное устройство позволяет использовать все степени подвижности управляемых механизмов (поворотной колонны, стрелы с рукоятью) при помощи трех рычагов управления. Однако такая механическая система управления имеет недостатки. Наличие трех рычагов управления не дает возможности разгрузить внимание оператора, облегчить его работу. Кроме того, управление машиной манипуляторного типа производится только в активном режиме (от руки оператора), что в определенных условиях работы, особенно в тяжелых, неадаптированных к условиям ограниченности степеней манипулирования объектами - бревнами, хлыстами, расположенными неупорядоченно, может привести к заклиниванию и т.п., т.е. снижает надежность работы машины манипуляторного типа в целом.
Целью предлагаемого изобретения является не только обеспечение возможности активного режима управления манипулятором с использованием всех степеней подвижности управляемых механизмов, но и адаптация к условиям ограниченности степеней манипулирования объектами, т.е. возможность работы механизмов стрелы-плеча, предплечья в пассивном режиме за счет гидравлического отключения от соответстующих гидрораспределителей.
Для достижения этой цели в устройстве управления манипулятором, содержащем шарнирно сочлененные поворотную колонну, стрелу с исполнительным механизмом, их гидроприводы, а также гидравлическую систему управления, включающую гидрораспределители, и кинематически связанную с нею механическую систему управления, последняя выполнена в виде двух рукояток, осуществляющих трехкоординатное управление за счет одновременной связи с гидрораспределителями по числу степеней подвижности управляемых механизмов, и двух педалей, осуществляющих гидравлическое отключение, т. е. управление пассивным, или плавающим, режимом работы, за счет непосредственного соединения рабочих полостей гидропривода соответствующего управляемого механизма стрелы (плеча или предплечья) со сливом.
На фиг. 1 представлено устройство - манипулятор с исполнительным механизмом в виде захвата клещевого типа; на фиг. 2 - кинематическая схема рукоятки механической системы управления; на фиг. 3 - гидравлическая схема устройства в целом.
Устройство-манипулятор, представленное на фиг. 1, содержит шарнирно сочлененные колонну 1, состоящую из плеча 2 и предплечья 3 с выдвижной частью 4, привод 5 поворота колонны 1, гидропривод 6, обеспечивающий подъем-опускание плеча 2, гидропривод 7 с рычажным механизмом 8, обеспечивающий подъем-опускание предплечья 3, привод 9 вращения захвата 10. Гидроприводы выдвижной части 4 предплечья 3 и сведения-разведения клещевого захвата 10 на фиг. 1 не показаны.
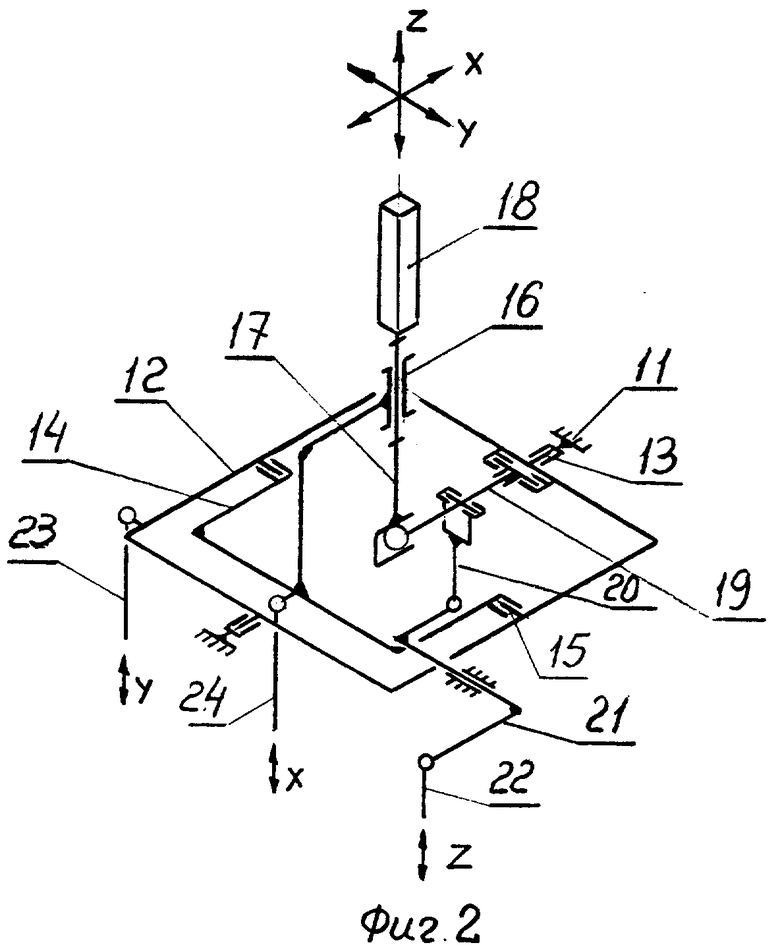
На фиг. 2 представлена кинематическая схема рукоятки механической системы управления, установленной с возможностью перемещения по трем координатам. Рукоятка управления содержит основание 11, рамку 12, установленную на осях 13 на основании 11, рамку 14, установленную на осях 15 в рамке 12, направляющую 16, неподвижно соединенную с рамкой 14. В направляющей 16 с возможностью поступательного перемещения размещен шток 17 с ручкой 18, имеющий на свободном конце проушину, в которую входит ролик рычага 19. Рычаг 19 закреплен на оси на рамке 12 и связан с тягой 20, которая, в свою очередь, связана с Z-образным рычагом 21, закрепленным на основании 11, последний посредством тяги 22 связан с гидрораспределителями, управляющими движением по оси Z при перемещении ручки вверх или вниз.
Рамка 12 посредством тяги 23 связана с гидрораспределителями, управляющими движением по оси Y при перемещении ручки 18 вправо или влево.
Рамка 14 посредством тяги 24 связана с гидрораспределителями, управляющими движением по оси X при перемещении ручки 18 вперед или назад.
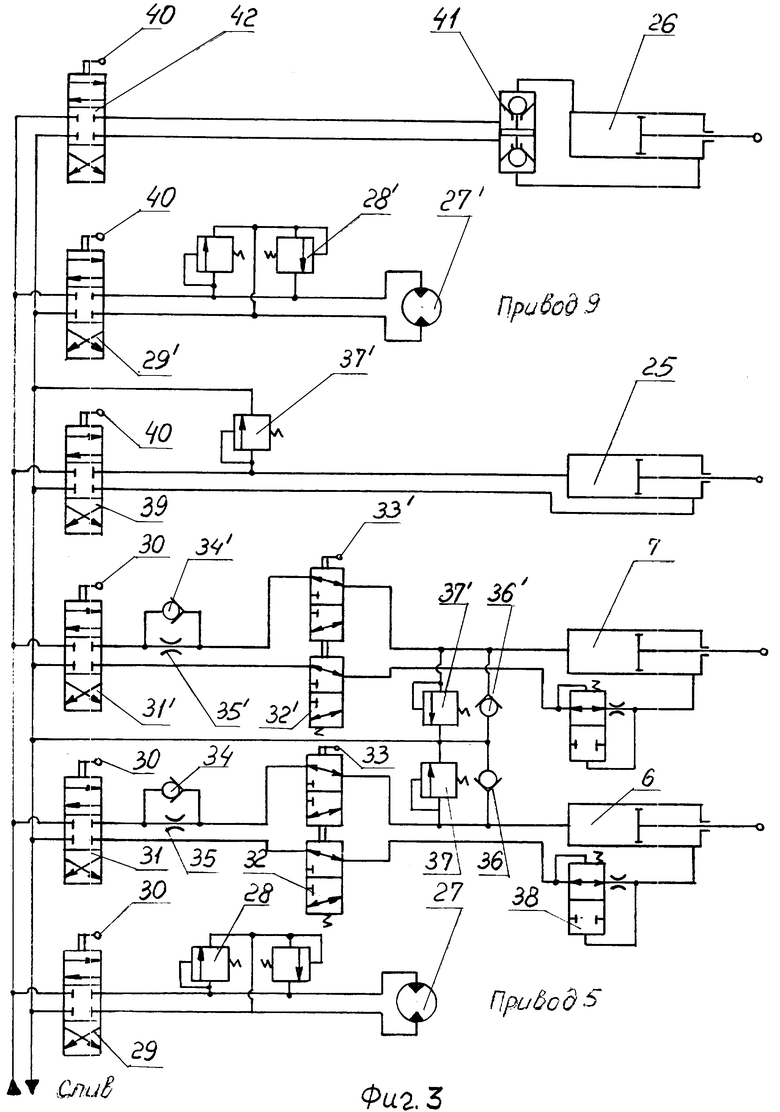
Гидравлическая схема устройства, представленная на фиг. 3, содержит гидравлические цепи привода 5 поворота колонны 1, гидропривода (гидроцилиндра) 6 плеча 2, гидропривода (гидроцилиндра) 7 предплечья 3, привода 9 вращения захвата 10, гидропривода (гидроцилиндра) 25 выдвижной части 4 предплечья 3, гидропривода (гидроцилиндра) 26 сведения-разведения челюстей захвата 10, связанных в параллель с напорной линией и линией слива в сливной бак (на фиг. не показан).
Гидравлическая цепь привода 5 поворотной колонны 1 содержит гидромотор 27, связанный через предохранительные клапаны 28 с трехпозиционным золотниковым гидрораспределителем 29, кинематически связанным с правой рукояткой 30 (ось Y на фиг. 2).
С этой же правой рукояткой 30 кинематически связан гидрораспределитель 31 (трехпозиционный золотник) управления подъемом-опусканием плеча 2 (по оси Z - фиг. 2). В этой гидравлической цепи рабочие полости гидроцилиндра 6 связаны с двухпозиционным золотниковым гидрораспределителем 32, кинематически связанным с правой педалью 33. В поршневой части цилиндра 6 установлены обратный клапан 34 с дросселем 35 и обратный и предохранительный клапаны, соответственно 36, 37. В штоковой части гидроцилиндра 6 установлен отсечной клапан 38.
Цепь управления гидроцилиндром 7, управляющим перемещением предплечья 3, кинематически связанная с той же правой рукояткой 30 (ось X - фиг. 2), но с левой педалью 33', выполнена аналогично.
Гидравлическая цепь гидроцилиндра 25 выдвижной части 4 предплечья 3 включает трехпозиционный золотниковый гидрораспределитель 39, установленный через предохранительный клапан, аналогичный клапану 37, кинематически связанный с левой рукояткой 40 (ось X на фиг. 2).
Гидравлическая цепь привода 9 вращения захвата 10 выполнена аналогично гидравлической цепи привода 5 поворотной колонны 1, гидрораспределитель 29' которой связан с левой рукояткой 40 (ось Y на фиг. 2).
В гидравлической цепи гидроцилиндра 26, управляющего сведением-разведением челюстей захвата 10, установлены гидрозамок 41 и трехпозиционный золотниковый гидрораспределитель 42, кинематически связанный с левой рукояткой 40 (ось Z на фиг. 2).
Таким образом, механическая система управления, вынесенная на панель управления (на фиг. не показана) содержит две рукоятки 30, 40, установленные с возможностью перемещения по трем координатам X, Y, Z, и две педали 33, 33'. Правая рукоятка 30 служит для управления поворотом колонны 1 (Y), перемещением плеча 2(Z) и предплечья 3(X) подъем и опускание; левая рукоятка 40 служит для управления перемещением выдвижной части 4 предплечья 3 (X), вращением захвата 6 (Y), сведением-разведением челюстей захвата 6 (Z) в активном режиме управления.
Правая педаль 33 служит для управления плечом 2, а левая педаль 33' - для управления предплечьем 3 в пассивном режиме.
Устройство управления манипулятором работает следующим образом.
При отсутствии механического воздействия на рукоятки и педали механической системы управления все приводы неподвижны.
При смещении правой рукоятки 30 (фиг. 3) вправо или влево, т.е. при перемещении ручки 18 (фиг. 2) по оси Y рамка 12 качается на осях 13 и посредством тяги 23 перемещает золотник гидрораспределителя 29 (фиг. 3), и давление подается на гидромотор 27 привода 5 (фиг. 1, 3) поворота колонны 1 (фиг. 1), которая соответственно поворачивается вправо или влево. При возвращении правой рукоятки 30 (фиг. 3) в нейтральное положение подача давления на гидромотор 27 прекращается и колонна 1 останавливается. Предохранительные клапаны 28 служат для выравнивания давления в магистрали при его повышении сверх номинального при резком возвращении рукоятки в нейтральное положение или при внешнем воздействии.
При смещении правой рукоятки 30 вверх, т.е. при перемещении ручки 18 (фиг. 2) по оси Z вверх шток 17 также перемещается в направляющей 16, вызывая перемещение через рычаг 19, тягу 20, Z-образный рычаг 21 тяги 22, которая перемещает золотник гидрораспределителя 31 (фиг. 3). Гидрораспределитель 31 подает давление в штоковую полость гидроцилиндра 6 (фиг. 1, 3). Рабочая жидкость из поршневой полости гидроцилиндра 6 через обратный клапан 34 (фиг. 3) и золотник гидрораспределителя 31 пойдет в слив. При этом плечо 2 (фиг. 1) начнет подниматься.
При смещении правой рукоятки 30 вниз происходит, соответственно, обратное перемещение, при этом давление через дроссель 35 обратного клапана 34, ограничивающий расход рабочей жидкости, подается в поршневую полость гидроцилиндра 6, плечо 2 (фиг. 1) опускается. Предохранительный клапан 37 (фиг. 3), установленный в поршневой цепи гидроцилиндра 6, открывается при превышении нагрузки сверх допустимой, т.о. служит для предохранения плеча 2 от случайного воздействия внешней нагрузки. В штоковой части гидравлической цепи гидроцилиндра 6 установлен отсечной клапан 38, перекрывающий штоковую полость гидроцилиндра 6 при превышении расхода жидкости сверх установленного, т.о. служит для предотвращения падения плеча 2, например, при разрыве магистрали.
При нажатии на правую педаль 33 (на фиг. 1, 2 не показана), перекладывается золотник гидрораспределителя 32 (двухпозиционный), соединяя обе рабочих полости гидроцилиндра 6 непосредственно со сливом. Плечо 2 при этом перемещается под действием собственного веса или внешней нагрузки.
При смещении правой рукоятки 30 вперед или назад, что соответствует перемещению ручки 18 (фиг. 2), по оси X, рамка 14 качается на осях 15 и посредством тяги 24 передает перемещение на соответствующий гидрораспределитель (31'), предплечье 3 (фиг. 1) с помощью гидроцилиндра 7 (фиг. 1, 3) поворачивается соответственно вперед или назад. Гидравлическая цепь и ее работа полностью аналогичны гидравлической цепи гидроцилиндра 6. Однако пассивное управление производится нажатием на левую педаль 33' (фиг. 3). При нажатии на левую педаль 33' аналогично рабочие полости гидроцилиндра 7 (фиг. 1, 3) соединяются со сливом, при этом предплечье 3 (фиг. 1) так же перемещается под действием собственного веса или внешней нагрузки.
Гидроцилиндр 25 выдвижения выдвижной части 4 предплечья 3 управляется от гидрораспределителя 39 (трехпозиционный золотник) через предохранительные клапаны 37', аналогичные клапаны 37 в цепи управления гидроприводами 6, 7, кинематически связанного с левой рукояткой 40, и переключается при смещении левой рукоятки 40 вперед или назад (перемещение ручки 18 по оси X фиг. 2).
Смещение левой рукоятки 40 вправо или влево (соответственно перемещение ручки 18 по оси Y - фиг. 2) вызывает вращение гидромотора 27', аналогичного 27 цепи управления приводом 5 поворота колонны 1. Работа производится таким же образом. Смещение левой рукоятки 40 вверх или вниз (перемещение ручки 18 по оси Z - фиг. 2) перемещает трехпозиционный золотник гидрораспределителя 42, который через гидрозамок 41 подает давление на гидроцилиндр 26, приводящий в действие челюсти захвата 10 (фиг. 1). Гидрозамок 41 служит для предотвращения самопроизвольного раскрытия (разведения) челюстей захвата 10 при наличии утечек через управляющий гидрораспределитель 42.
Перемещение по одной из степеней подвижности рукояток, правой 30 и левой 40, не вызывает перемещения по другим степеням, скорость перемещения управляемых механизмом пропорциональна величине смещения рукояток. Оператор имеет возможность изменять скорость от нулевого значения до номинального, при этом может управлять всеми приводами, т.е. перемещения по всем степеням подвижности управляемых механизмов одновременно, поочередно или в любом сочетании, т.к. все цепи кинематически и гидравлически развязаны между собой.
Таким образом, устройство управления работает в активном режиме.
Однако в сложных условиях работы, например, с бревнами, хлыстами и т.п. предметами, уложенными неупорядоченно, т.е. когда при захвате зажимным органом, например, клещевым захватом 10 может произойти заклинивание управляемых механизмов и их остановка, оператор имеет возможность работы в пассивном, или плавающем, режиме управления. Для этого служат две педали механической системы управления. При нажатии на правую (левую) педаль рабочие полости соответствующего гидроцилиндра через двухпозиционный золотник непосредственно соединяются с линией слива и, соответственно, плечо (или предплечье) перемещается под действием собственного веса или внешней нагрузки. Таким образом происходит адаптация к условиям ограничения степеней свободы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| ГИДРОПРИВОД НАВЕСНОГО МАНИПУЛЯТОРА | 1999 |
|
RU2158707C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ РЕВЕРС-РЕДУКТОРОМ | 2001 |
|
RU2216479C2 |
| ГИДРОПРИВОД СТРЕЛЫ ЭКСКАВАТОРА | 1995 |
|
RU2095523C1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
| ГИДРОПРИВОД УПРАВЛЕНИЯ СТРЕЛОЙ СТРОИТЕЛЬНОЙ МАШИНЫ | 1997 |
|
RU2150553C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Устройство управления грузоподъемным краном | 1980 |
|
SU965966A1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
Использование: в погрузочно-разгрузочных механизмах, а именно в манипуляторах, главным образом, для лесной промышленности и может быть использовано как на лесозаготовительных машинах при валке, трелевке и пакетировании леса, так и на агрегатах для лесосплава для подъема затонувшей, полузатонувшей и плавающей древесины и ее пакетирования. Сущность изобретения: в устройстве, содержащем шарнирно сочлененные поворотную колонну, стрелу с исполнительным механизмом в виде клещевого захвата, их гидропривода, а также гидравлическую систему управления, включающую гидрораспределители, и кинематически связанную с ней механическую систему управления, последняя выполнена в виде двух рукояток, установленных с возможностью трехкоординатного перемещения, каждая из которых одновременно связана с гидрораспределителями по числу степеней подвижности управляемых механизмов, и двух педалей, каждая из которых связывает рабочие полости гидропривода соответствующего механизма стрелы непосредственно со сливом, осуществляя гидравлическое отключение от гидрораспределителей, управляемых рукоятками. 3 ил.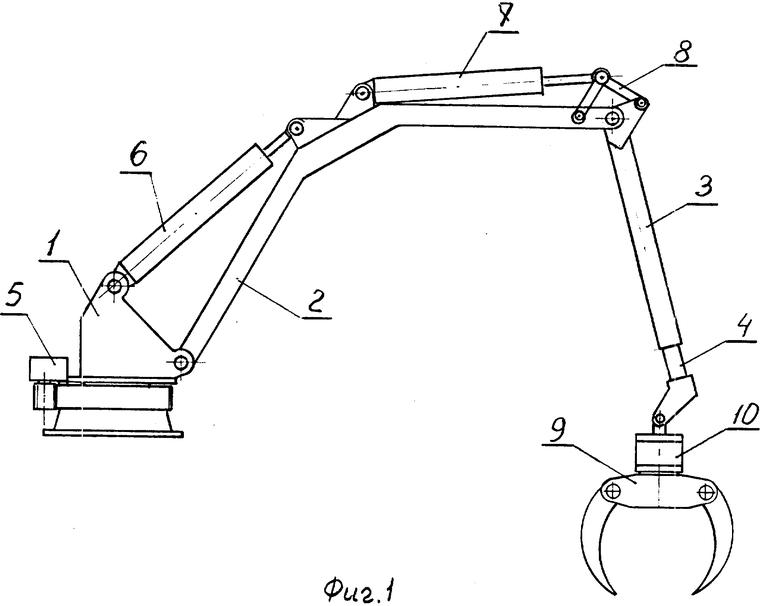
Устройство управления манипулятором, содержащее шарнирно сочлененные поворотную колонну, стрелу с исполнительным механизмом, их гидроприводы, а также гидравлическую систему управления, включающую гидрораспределители, и кинематически связанную с ней механическую систему управления, отличающееся тем, что механическая система управления выполнена в виде двух рукояток, установленных с возможностью перемещения по трем координатам, каждая из которых одновременно связана с гидрораспределителями по числу степеней подвижности соответствующих ей управляемых механизмов, и двух педалей, посредством которых рабочие полости гидропривода соответствующего механизма стрелы сообщены непосредственно со сливом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство СССР 484172, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU , авторское свидетельство СССР 701792, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
