Изобретение относится к подъемно-транспортному машиностроению и касается гидравлического привода стреловых самоходных кранов большой грузоподъемности, имеющих телескопическую стрелу.
Известно устройство для последовательного движения многоступенчатой крановой стрелы по акцептованной заявке JP 63-53113, МПК4 В 66 С 23/68, F 15 В 11/28, 1988 г. Известное устройство содержит телескопическую стрелу, включающую базовую секцию, внутри которой с возможностью скольжения установлена выдвигаемая средняя секция телескопической стрелы. Внутри выдвигаемой средней секции стрелы с возможностью скольжения установлена выдвигаемая передняя секция телескопической стрелы. Устройство также содержит механизм выдвижения телескопической стрелы, включающий два гидроцилиндра соответственно размещенных между всеми секциями стрелы. Причем шток первого гидроцилиндра шарнирно закреплен на базовой секции телескопической стрелы, корпуса первого и второго гидроцилиндров шарнирно закреплены на одном из концов выдвигаемой средней секции телескопической стрелы, шток второго гидроцилиндра шарнирно закреплен на выдвигаемой передней секции телескопической стрелы.
Известное устройство предполагает наличие гидравлического привода, обеспечивающего последовательное выдвижение (втягивание) секций телескопической стрелы. Однако в известном устройстве гидравлический привод телескопирования не раскрыт.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является гидравлический привод стрелового самоходного крана по патенту RU 2158220, МПК7 В 66 С 13/42, 2000 г., который и выбран в качестве ближайшего аналога-прототипа. Известный гидравлический привод содержит ограничитель грузового момента с датчиком длины выдвижения стрелы, источник питания, представляющий собой два аксиально-поршневых регулируемых насоса, каждый - с регулятором мощности, шарнирно закрепленные на телескопической стреле гидроцилиндры соответственно механизмов выдвижения и подъема телескопической стрелы, гидромоторы соответственно поворота платформы и грузовой лебедки, сообщенные через трехпозиционные распределители, являющиеся элементами распределительного блока с электрогидравлическим пропорциональным управлением, с источником питания и баком. Причем полости управления трехпозиционных распределителей посредством магистралей сообщены с насосом управления и баком. При этом в магистрали между насосом управления и полостями управления трехпозиционных распределителей установлен автоматически подзаряжаемый пневмогидроаккумулятор.
Однако известный гидравлический привод стрелового самоходного крана в случае, когда количество секций телескопической стрелы больше двух, не предполагает обеспечение последовательного выдвижения (втягивания) секций телескопической стрелы в порядке, который является оптимальным с точки зрения рационального использования несущей способности телескопической стрелы. Отмеченный недостаток обуславливает либо необходимость увеличения прочности, например, выдвигаемой передней секции стрелы, что связано с увеличением массы телескопической стрелы и крана в целом, либо - необходимость занижения допускаемого грузового момента. И то и другое приводит к снижению КПД гидравлического привода и крана в целом.
Задачей настоящего изобретения является создание надежного гидравлического привода стрелового самоходного крана достаточно большой грузоподъемности, обеспечивающего заданную последовательность выдвижения (втягивания) секций телескопической стрелы.
Решение указанной задачи обеспечивается тем, что в известном гидравлическом приводе стрелового самоходного крана, содержащем ограничитель грузового момента с датчиком длины выдвижения стрелы, источник питания, включающий по меньшей мере один аксиально-поршневой регулируемый насос с регулятором мощности и насос управления, гидроцилиндр механизма выдвижения телескопической стрелы, шарнирно закрепленный на последней и сообщенный через трехпозиционный распределитель, являющийся элементом распределительного блока с электрогидравлическим пропорциональным управлением, с источником питания и баком, причем полости управления трехпозиционного распределителя посредством магистралей сообщены с насосом управления и баком, при этом в магистрали между насосом управления и полостями управления трехпозиционного распределителя установлен пневмогидроаккумулятор, согласно изобретению механизм выдвижения телескопической стрелы снабжен вторым гидроцилиндром. При этом шток первого гидроцилиндра шарнирно закреплен на базовой секции телескопической стрелы. Корпус первого гидроцилиндра и шток второго гидроцилиндра шарнирно закреплены на одном из концов выдвигаемой средней секции телескопической стрелы. Корпус второго гидроцилиндра шарнирно закреплен на выдвигаемой передней секции телескопической стрелы. Упомянутые гидроцилиндры снабжены каждый тормозным и обратным клапанами, через которые поршневые полости гидроцилиндров посредством трехпозиционного распределителя сообщены соответственно с источником питания. Штоковые полости гидроцилиндров сообщены между собой и с полостью управления тормозного клапана второго гидроцилиндра. При этом гидравлический привод содержит двухпозиционный распределитель с электрогидравлическим управлением, сообщенный с насосом управления, и двухпозиционный распределитель с электромагнитным управлением, которые выполнены с возможностью электрической связи с датчиком длины выдвижения стрелы. Полость управления тормозного клапана первого гидроцилиндра имеет возможность сообщения через двухпозиционный распределитель с электромагнитным управлением в одной его позиции с магистралью, связывающей штоковую полость первого гидроцилиндра через трехпозиционный распределитель с источников питания, а в другой позиции - со сливной магистралью, сообщенной с баком. При этом поршневая полость второго гидроцилиндра имеет возможность сообщения через двухпозиционный распределитель с электрогидравлическим управлением в одной его позиции с баком через дополнительно введенный обратный клапан, а в другой позиции - с источником питания, через трехпозиционный распределитель.
Технический результат использования изобретения состоит в том, что в сравнении с известным гидравлическим приводом по патенту RU 2158220 обеспечивается последовательное выдвижение (втягивание) секций телескопической стрелы в заданном порядке, что позволяет снизить требования, предъявляемые к прочности выдвигаемых секций телескопической стрелы и, следовательно, массу последней, в результате чего обеспечивается повышение КПД привода.
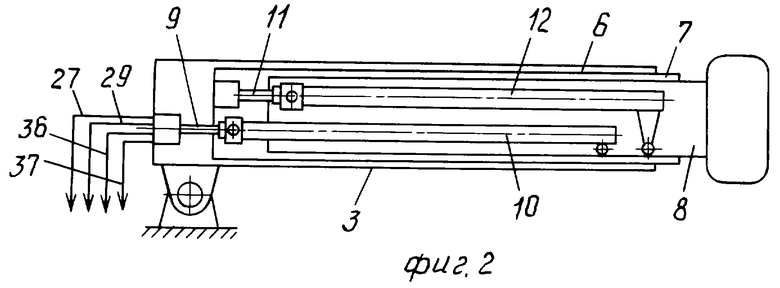
На фиг.1 представлена принципиальная схема гидравлического привода стрелового самоходного крана; на фиг.2 схематично показана телескопическая стрела с закрепленными внутри нее гидроцилиндрами механизма выдвижения телескопической стрелы, продольный разрез.
В варианте осуществления изобретения гидравлический привод используется в железнодорожном стреловом самоходном кране, предназначенном для погрузочно-разгрузочных и восстановительных работ.
Гидравлический привод стрелового самоходного крана содержит источник питания, включающий аксиально-поршневой регулируемый насос 1 с регулятором мощности, насос управления 2 и механизм выдвижения телескопической стрелы 3, включающий гидроцилиндры 4 и 5. Насос управления 2 выполнен с возможностью подключения к внешнему источнику электроэнергии. В качестве аксиально-поршневого регулируемого насоса 1 может быть использован, например, насос типа НК 32 (изготовитель - АО "Пролетарский завод", Санкт-Петербург). В варианте выполнения телескопическая стрела 3 включает базовую секцию 6 и выдвигаемые среднюю и переднюю секции 7 и 8. Шток 9 гидроцилиндра 4 шарнирно закреплен на базовой секции 6 телескопической стрелы 3. Корпус 10 гидроцилиндра 4 и шток 11 гидроцилиндра 5 шарнирно закреплены на одном из концов выдвигаемой средней секции 7 телескопической стрелы 3. Корпус 12 гидроцилиндра 5 шарнирно закреплен на выдвигаемой передней секции 8 телескопической стрелы 3. Гидроцилиндры 4 и 5 снабжены каждый тормозным клапаном соответственно 13, 14 и обратным клапаном соответственно 15, 16, через которые поршневые полости гидроцилиндров 4 и 5 через соответствующие магистрали сообщаются с источником питания. Штоковые полости гидроцилиндров 4 и 5 сообщены между собой и с полостью управления тормозного клапана 14 посредством магистралей 17 и 18. В качестве тормозных клапанов 13 и 14 могут быть использованы, например, тормозные клапаны типа 9702000 (изготовитель - ПО "Московский машиностроительный завод им. Калинина").
Гидравлический привод содержит двухпозиционный распределитель 19 с электрогидравлическим управлением и двухпозиционный распределитель 20 с электромагнитным управлением, электрически связанные с датчиком длины выдвижения стрелы (на чертеже не показано), являющимся составной частью установленного на кране ограничителя грузового момента. В варианте осуществления изобретения ограничитель грузового момента представляет собой систему, которая включает ЭВМ, датчик массы поднимаемого груза, датчик длины выдвижения стрелы, датчик угла поворота поворотной части и датчик крена платформы (на чертеже не показаны). Двухпозиционный распределитель 19 с электрогидравлическим управлением сообщен с насосом управления и включает основной и управляющий золотники 21, 22. В варианте осуществления изобретения двухпозиционные распределители 19 и 20 являются элементами распределительного блока 23, который через обратный клапан 24 и сливную магистраль 25 сообщен с баком 26. В качестве двухпозиционного распределителя 19 с электрогидравлическим управлением может быть использован, например, гидрораспределитель типа 1РН203-АЕ1-574. В6Г24НХЛ1 ТУ2-053-1846-87 (изготовитель - АО "Ульяновский завод гидроаппаратуры", г. Ульяновск). В качестве двухпозиционного распределителя 20 с электромагнитным управлением может быть использован, например, гидрораспределитель типа ВЕ6.574Г24НХЛ1 ГОСТ 24679-81 (изготавливается тем же АО).
Полость управления тормозного клапана 13 гидроцилиндра 4 сообщена через магистраль 27 с двухпозиционным распределителем 20 с электромагнитным управлением. Посредством двухпозиционного распределителя 20 в одной его позиции полость управления тормозного клапана 13 имеет возможность сообщения через магистраль 28 с магистралью 29, связывающей штоковую полость гидроцилиндра 4 через трехпозиционный распределитель 30 и магистраль 31 с аксиально-поршневым регулируемым насосом 1. В другой позиции двухпозиционного распределителя 20 полость управления тормозного клапана 13 имеет возможность сообщения через дренажные магистрали 32 и 33 с баком 26.
Поршневая полость гидроцилиндра 5 сообщена через тормозной клапан 14, магистраль 34, канал 35, выполненный внутри гидроцилиндра 4, и магистраль 36 с двухпозиционным распределителем 19 с электрогидравлическим управлением. Посредством двухпозиционного распределителя 19 в одной его позиции поршневая полость гидроцилиндра 5 имеет возможность сообщения через обратный клапан 24 и сливную магистраль 25 с баком 26. В другой позиции двухпозиционного распределителя 19 поршневая полость гидроцилиндра 5 имеет возможность сообщения через магистраль 37, трехпозиционный распределитель 30 и магистраль 31с аксиально-поршневым регулируемым насосом 1.
Обратный клапан 24 является блокировочным. При выдвижении посредством гидроцилиндра 4 средней секции 7 телескопической стрелы 3 обратный клапан 24 препятствует проникновению жидкости под давлением из сливной магистрали 25 в поршневую полость гидроцилиндра 5. Благодаря этому исключается возможность несанкционированного выдвижения передней секции 8 телескопической стрелы. При отсутствии обратного клапана 24 жидкость под давлением из сливной магистрали 25 могла бы поступать в поршневую полость гидроцилиндра 5 через двухпозиционный распределитель 19, магистраль 36, канал 35, магистраль 34, обратный клапан 16 и центральный канал гидроцилиндра 5 (упомянутый центральный канал на чертеже не показан).
В варианте осуществления изобретения управление исполнительными гидродвигателямя стрелового самоходного крана осуществляется посредством распределительного блока 38 с электрогидравлическим пропорциональным управлением. Распределительный блок 38 включает четыре трехпозиционных распределителя, связанные с источником питания и баком 26, а также регуляторы давления с электромагнитным управлением, связанные с установленным на кране ограничителем грузового момента, и манипулятор (на чертеже не показано). Полости управления трехпозиционных распределителей через соответствующие регуляторы давления и напорную и сливную магистрали 39, 25 сообщены с насосом управления 2 и баком 26. В распределительном блоке 38 смонтирован предохранительный клапан 40, предназначенный для защиты аксиально-поршневого регулируемого насоса 1 от перегрузки. Управление гидроцилиндрами 4 и 5 механизма выдвижения телескопической стрелы 3 осуществляется посредством трехпозиционного распределителя 30 с регуляторами давления 41, 42. Посредством остальных трехпозиционных распределителей распределительного блока 38, показанных на чертеже, осуществляется управление другими исполнительными приводами крана, например приводом поворота платформы, приводом подъема телескопической стрелы, приводом грузовой лебедки (на чертеже не показаны).
Упомянутый манипулятор является элементом системы управления распределительным блоком 38 и размещается в кабине машиниста. Манипулятор электрически связан с электромагнитами регуляторов давления распределительного блока 38. Рукоятка манипулятора управляет датчиками-потенциометрами, связанными с блоком управления (на чертеже не показан). Отклонение рукоятки манипулятора от нейтрального положения приводит к подаче управляющего сигнала на соответствующие электромагниты регуляторов давления, что в трехпозиционных распределителях распределительного блока 38 приводит к изменению давления управления пропорционально углу отклонения рукоятки манипулятора. В результате золотник трехпозиционного распределителя смещается в сторону меньшего давления.
Гидравлический привод снабжен предохранительным клапаном 43, гидравлически связанным с насосом управления 2 и настроенным на давление, например, 5,0-5,5 МПа. Это давление необходимо для питания системы управления аксиально-поршневого регулируемого насоса 1 и двухпозиционного распределителя 19. В сливной магистрали 25 установлен фильтр 44, через который жидкость из гидросистемы сливается в бак 26. В магистрали между насосом управления 2 и полостями управления трехпозиционного распределителя 30 (по существу в магистрали между насосом управления и полостями управления трехпозиционных распределителей распределительного блока 38) установлен автоматически подзаряжаемый пневмогидроаккумулятор 45 с гидроклапанами 46-48. В качестве последнего может быть использован, например, пневмогидроаккумулятор с гидроклапанами типа 64000А (изготовитель ПО "Московский машиностроительный завод им. Калинина"). От насоса управления 2 жидкость поступает по магистрали 49 к редукционному клапану 46, а от него к предохранительному клапану 47 и обратному клапану 48 и далее к пневмогидроаккумулятору 45 и по напорной магистрали 39 на входы регуляторов давления, например, 41, 42.
Гидравлический привод стрелового самоходного крана работает следующим образом.
Перед началом работы крана включают электропитание (например, 24 В) электромагнитов регуляторов давления распределительного блока 38 и манипулятора, расположенного в кабине машиниста. Включают насос управления 2, и жидкость под давлением, например, 5,0-5,5 МПа, соответствующим настройке предохранительного клапана 43, по магистрали 49 поступает в систему управления аксиально-поршневого регулируемого насоса 1 к двухпозиционному распределителю 19 и к пневмогидроаккумулятору 45 с гидроклапанами 46-48. После редукционного клапана 46 давление жидкости становится равным, например, 3 МПа. Предохранительный клапан 47 настроен на величину давления, например, 4 МПа. Отредуцированное давление через обратный клапан 48 поступает в пневмогидроаккумулятор и заряжает его до этой величины, после чего давление управления поступает по магистрали 39 в систему управления распределительного блока 38 с электрогидравлическим пропорциональным управлением, в частности, к регуляторам давления 41, 42, подготавливая последние к работе в пропорциональном режиме управления. Затем включается аксиально-поршневой регулируемый насос 1. От насоса 1 рабочая жидкость поступает в распределительный блок 38 и через четыре трехпозиционных распределителя, находящихся в нейтральном положении, по центральному каналу поступает в сливную магистраль 25 и через фильтр 44 поступает в бак 26. Таким образом аксиально-поршневой регулируемый насос I находится в разгруженном состоянии.
Последовательное выдвижение средней и передней секций 7, 8 телескопической стрелы 3 осуществляется следующим образом. При выдвижении средней секции 7 стрелы (совместно с находящейся внутри нее передней секцией 8 стрелы) машинист крана отклоняет, например, вперед (от себя) рукоятку манипулятора распределительного блока 38. Отклонение рукоятки манипулятора от нейтрального положения приводит к подаче управляющего сигнала на электромагнит регулятора давления 41. Электромагнит с переменным усилием, пропорциональным углу отклонения рукоятки манипулятора, воздействует на редукционный клапан регулятора давления. Редукционный клапан выдает на выходе переменное редуцированное давление в пределах, например, 0-3 МПа, которое поступает к соответствующему торцу золотника трехпозиционного распределителя 30. В соответствии с величиной усилия, с которым давление настройки редукционного клапана воздействует на торец золотника, последний перемещается вниз (по чертежу) на соответствующую величину. Жидкость от насоса I через открывшуюся щель золотника трехпозиционного распределителя 30 поступит в магистраль 37, к тормозному клапану 13 и через обратный клапан 15 поступит в поршневую полость гидроцилиндра 4. Средняя секция 7 совместно с передней секцией 8 начнет выдвигаться из базовой секции 6 телескопической стрелы 3. При этом перемещения передней секции 8 телескопической стрелы относительно средней секции 7 телескопической стрелы не происходит, так как двухпозиционный распределитель 19 находится в выключенном положении и жидкость из магистрали 37 не может пройти в магистраль 36 и далее в гидроцилиндр 5.
Когда средняя секция 7 стрелы выдвинется до упора, по сигналу датчика длины выдвижения стрелы через систему управления подается напряжение на электромагнит управляющего золотника 22 двухпозиционного распределителя 19. Управляющий золотник 22 перемещается вправо (по чертежу). Давление управления, например, 5-5,5 МПа от насоса управления 2 по магистрали 49 пройдет к левому (по чертежу) торцу основного золотника 21 двухпозиционного распределителя 19. Основной золотник 21 переместится в левую (по чертежу) позицию. Жидкость из магистрали 37 через включенный основной золотник 21 пройдет в магистраль 36 и далее через канал 35, магистраль 34 пройдет к тормозному клапану 14 и через обратный клапан 16 поступит в поршневую полость гидроцилиндра 5. В результате передняя секция 8 стрелы начнет выдвигаться из средней секции 7 при полностью выдвинутой из базовой секции 6 средней секции 7 стрелы.
В начале выдвижения передней секции 8 стрелы, по сигналу датчика длины выдвижения стрелы, на электромагнит двухпозиционного распределителя 20 распределительного блока 23 через систему управления подается напряжение. Двухпозиционный распределитель 20 включается в левую (по чертежу) позицию. При этом магистраль 27 управления тормозным клапаном 13 гидроцилиндра 4 через двухпозиционный распределитель 20 сообщается посредством дренажных магистралей 32 и 33 с баком 26, в результате чего несанкционированное втягивание средней секции 7 стрелы в базовую секцию 6 стрелы не может осуществляться. Таким образом, достигается последовательное выдвижение средней и передней секций телескопической стрелы 3.
Последовательное втягивание передней и средней секций 8, 7 телескопической стрелы осуществляется следующим образом. При втягивании передней секции 8 стрелы внутрь средней секции 7 стрелы машинист крана отклоняет, например, назад (на себя) рукоятку манипулятора распределительного блока 38. Отклонение рукоятки манипулятора приводит к подаче управляющего сигнала на электромагнит регулятора давления 42. Электромагнит воздействует на редукционный клапан регулятора давления. Редукционный клапан выдает на выходе переменное редуцированное давление, которое поступает к соответствующему торцу золотника трехпозиционного распределителя 30. Золотник перемещается вверх (по чертежу). Жидкость от насоса 1 поступит в магистраль 29 и далее в штоковую полость гидроцилиндра 4 и по магистрали 18 поступит в штоковую полость гидроцилиндра 5 передней секции 8 стрелы. Одновременно по магистрали 17 давление поступит в тормозной клапан 14, откроет его гидрозамок и шток 11 гидроцилиндра 5 начнет втягиваться внутрь корпуса 12 гидроцилиндра 5, втягивая при этом переднюю секцию 8 телескопической стрелы внутрь средней секции 7 стрелы. Жидкость из поршневой полости гидроцилиндра 5 будет вытесняться через тормозной клапан 14 по магистрали 34, через канал 35 гидроцилиндра 4, по магистрали 36, через включенный двухпозиционный распределитель 19, по магистрали 37, через включенный трехпозиционный распределитель 30 и далее по магистрали 25 через фильтр 44 в бак 26.
При втягивании передней секции 8 внутрь средней секции 7 телескопической стрелы перемещения средней секции телескопической стрелы относительно базовой секции 6 телескопической стрелы не происходит. Это достигается благодаря тому, что шток 9 гидроцилиндра 4, несмотря на то, что жидкость под давлением поступает в штоковую полость последнего, не может втягиваться внутрь корпуса 10 гидроцилиндра 4 (и тем самым втягивать внутрь базовой секции 6 среднюю секцию 7), так как жидкость из поршневой полости гидроцилиндра 4 не может вытесняться через гидрозамок тормозного клапана 13, поскольку в магистраль 27 управления тормозным клапаном не поступает давление, так как эта магистраль через включенный двухпозиционный распределитель 20 сообщена посредством дренажных магистралей 32 и 33 с баком 26.
Когда шток 11 гидроцилиндра 5 втянется внутрь корпуса 12 полностью и, следовательно, полностью втянется передняя секция 8 телескопической стрелы внутрь средней секции 7 телескопической стрелы, по сигналу датчика длины выдвижения стрелы через систему управления отключается двухпозиционный распределитель 20. Золотник последнего под действием соответствующей пружины возвратится в исходное положение (в правую по чертежу позицию). При этом магистраль 27 управления тормозным клапаном 13 соединится посредством магистрали 28 с магистралью 29, по которой через трехпозиционный распределитель 30 от насоса 1 подается давление жидкости в штоковую полость гидроцилиндра 4. В результате давление жидкости поступит и к тормозному клапану 13, откроет его гидрозамок, и шток 9 гидроцилиндра 4 начнет втягиваться внутрь корпуса 10 гидроцилиндра 4, втягивая при этом среднюю секцию 7 телескопической стрелы (совместно с передней секцией 8) внутрь базовой секции 6 телескопической стрелы. Жидкость из поршневой полости гидроцилиндра 4 будет вытесняться через тормозной клапан 13 по магистрали 37, через включенный трехпозиционный распределитель 30 и далее по сливной магистрали 25 через фильтр 44 в бак 26. Таким образом, достигается последовательное втягивание передней и средней секций телескопической стрелы 3.
При работе гидравлического привода стрелового самоходного крана выдвижение или втягивание секций 7, 8 телескопической стрелы 3 может быть приостановлено в любой момент посредством перевода рукоятки манипулятора распределительного блока 38 в нейтральное положение.
Таким образом, благодаря особенности исполнения гидравлического привода стрелового самоходного крана изобретение обеспечивает возможность создания надежного гидравлического привода стрелового самоходного крана достаточно большой грузоподъемности, обеспечивающего последовательное выдвижение (втягивание) секций телескопической стрелы в заданном порядке при обеспечении оптимальной прочности металлоконструкций выдвигаемых секций телескопической стрелы и, следовательно, оптимальной массы телескопической стрелы, и тем самым позволяет повысить КПД привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН | 2000 |
|
RU2176615C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2003 |
|
RU2243311C1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Гидравлический привод стрелового самоходного крана | 1983 |
|
SU1235814A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2004 |
|
RU2258160C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2005 |
|
RU2303174C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
Изобретение относится к подъемно-транспортному машиностроению и касается гидравлического привода стреловых самоходных кранов большой грузоподъемности, имеющих телескопическую стрелу. Упомянутый привод содержит ограничитель грузового момента с датчиком длины выдвижения стрелы, источник питания, включающий по меньшей мере один аксиально-поршневой регулируемый насос с регулятором мощности и насос управления, трехпозиционный распределитель, являющийся элементом распределительного блока с электрогидравлическим пропорциональным управлением, и бак. Полости управления трехпозиционого распределителя посредством магистралей сообщены с насосом управления и баком. В магистрали между насосом управления и полостями управления трехпозиционного распределителя установлен пневмогидроаккумулятор. Механизм выдвижения телескопической стрелы имеет два гидроцилиндра. Шток первого гидроцилиндра шарнирно закреплен на базовой секции телескопической стрелы, а корпус первого гидроцилиндра и шток второго гидроцилиндра шарнирно закреплены на одном из концов выдвигаемой средней секции телескопической стрелы. При этом корпус второго гидроцилиндра шарнирно закреплен на выдвигаемой передней секции телескопической стрелы, а упомянутые гидроцилиндры снабжены каждый тормозным и обратным клапанами, через которые поршневые полости гидроцилиндров посредством трехпозиционного распределителя сообщены соответственно с источником питания. Штоковые полости гидроцилиндров сообщены между собой и с полостью управления тормозного клапана второго гидроцилиндра, причем гидравлический привод содержит двухпозиционный распределитель с электрогидравлическим управлением, сообщенный с насосом управления, и двухпозиционный распределитель с электромагнитным управлением. Упомянутые двухпозиционные распределители выполнены с возможностью электрической связи с датчиком длины выдвижения стрелы. Полость управления тормозного клапана первого гидроцилиндра имеет возможность сообщения через двухпозиционный распределитель с электромагнитным управлением в одной его позиции с магистралью, связывающей штоковую полость первого гидроцилиндра через трехпозиционный распределитель с источником питания, а в другой позиции - со сливной магистралью, сообщенной с баком. При этом поршневая полость второго гидроцилиндра имеет возможность сообщения через двухпозиционный распределитель с электрогидравлическим управлением в одной его позиции с баком через дополнительно введенный обратный клапан, а в другой позиции - с источником питания через трехпозиционный распределитель. Изобретение обеспечивает повышение надежности привода при обеспечении последовательного выдвижения нескольких секций телескопической стрелы. 2 ил.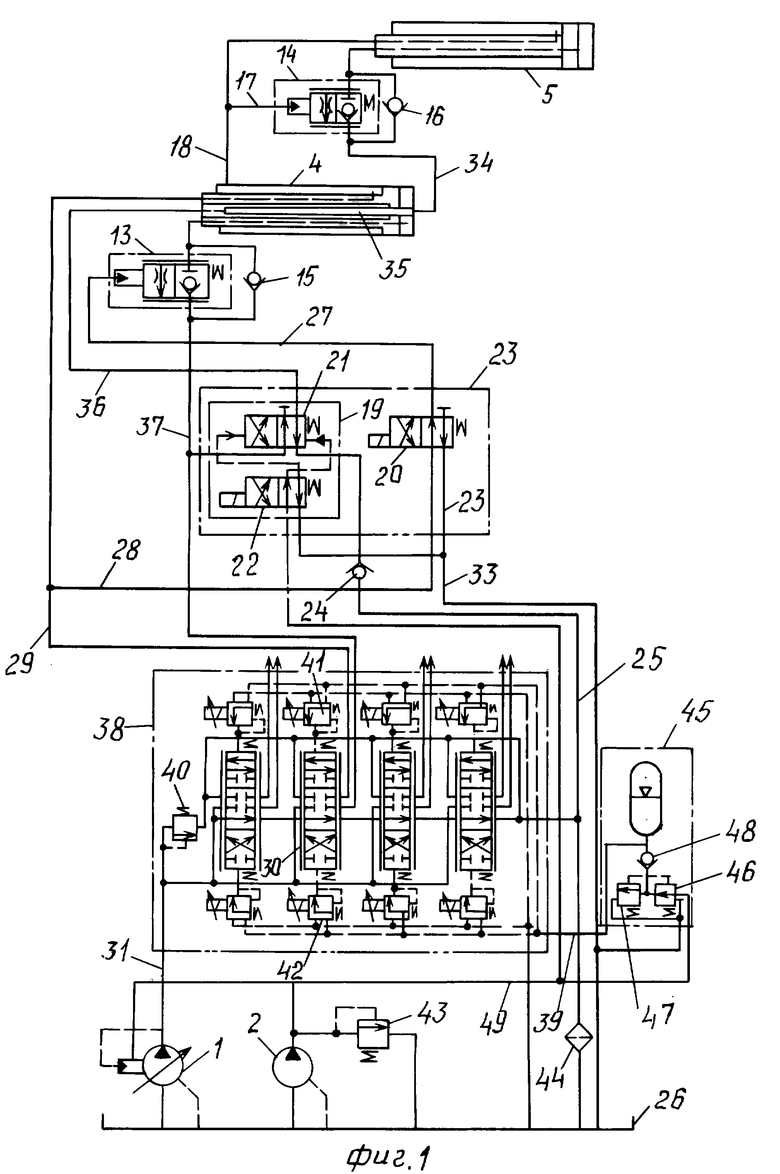
Гидравлический привод стрелового самоходного крана, содержащий ограничитель грузового момента с датчиком длины выдвижения стрелы, источник питания, включающий по меньшей мере один аксиально-поршневой регулируемый насос с регулятором мощности и насос управления, гидроцилиндр механизма выдвижения телескопической стрелы, шарнирно закрепленный на последней и сообщенный через трехпозиционный распределитель, являющийся элементом распределительного блока с электрогидравлическим пропорциональным управлением, с источником питания и баком, причем полости управления трехпозиционого распределителя посредством магистралей сообщены с насосом управления и баком, а в магистрали между насосом управления и полостями управления трехпозиционного распределителя установлен пневмогидроаккумулятор, отличающийся тем, что механизм выдвижения телескопической стрелы снабжен вторым гидроцилиндром, при этом шток первого гидроцилиндра шарнирно закреплен на базовой секции телескопической стрелы, корпус первого гидроцилиндра и шток второго гидроцилиндра шарнирно закреплены на одном из концов выдвигаемой средней секции телескопической стрелы, корпус второго гидроцилиндра шарнирно закреплен на выдвигаемой передней секции телескопической стрелы, причем упомянутые гидроцилиндры снабжены каждый тормозным и обратным клапанами, через которые поршневые полости гидроцилиндров посредством трехпозиционного распределителя сообщены соответственно с источником питания, при этом штоковые полости гидроцилиндров сообщены между собой и с полостью управления тормозного клапана второго гидроцилиндра, причем гидравлический привод содержит двухпозиционный распределитель с электрогидравлическим управлением, сообщенный с насосом управления, и двухпозиционный распределитель с электромагнитным управлением, которые выполнены с возможностью электрической связи с датчиком длины выдвижения стрелы, при этом полость управления тормозного клапана первого гидроцилиндра имеет возможность сообщения через двухпозиционный распределитель с электромагнитным управлением в одной его позиции с магистралью, связывающей штоковую полость первого гидроцилиндра через трехпозиционный распределитель с источником питания, а в другой позиции - со сливной магистралью, сообщенной с баком, причем, поршневая полость второго гидроцилиндра имеет возможность сообщения через двухпозиционный распределитель с электрогидравлическим управлением в одной его позиции с баком через дополнительно введенный обратный клапан, а в другой позиции - с источником питания через трехпозиционный распределитель.
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Гидропривод телескопической стрелы самоходного крана | 1980 |
|
SU867853A1 |
| Гидропривод телескопической стреды самоходного крана | 1976 |
|
SU610772A1 |
| US 5678708 A, 21.10.1997. | |||

