Область техники
Настоящее изобретение относится к кориолисову расходомеру для детектирования разности фаз и/или частоты вибрации, пропорциональной кориолисовой силе, действующей на расходомерную трубку, чтобы получать удельный массовый расход и/или плотность измеряемой текучей среды.
Предшествующий уровень техники
Кориолисов расходомер - это массовый расходомер, основанный на том, что кориолисова сила, действующая на расходомерную трубку (в дальнейшем в этом документе, расходомерная трубка для вибрации упоминается как расходомерная трубка), является пропорциональной удельному массовому расходу в случае, когда расходомерная трубка, через которую протекает измеряемая текучая среда, поддерживается с обоих концов, и вибрация прикладывается вокруг опорной точки в направлении, перпендикулярном направлению потока расходомерной трубки. Кориолисов расходомер хорошо известен, и форма расходомерной трубки в кориолисовом расходомере в общем разделяется на тип с прямыми трубками и тип с изогнутыми трубками.
Кориолисов расходомер - это массовый расходомер для детектирования сигнала разности фаз, пропорционального удельному массовому расходу, в симметричных положениях между обоими концевыми опорными участками и центральным участком измерительной трубки в случае, когда измерительная трубка, через которую протекает измеряемая текучая среда, поддерживается с обоих концов, и центральный участок поддерживаемой измерительной трубки попеременно возбуждается в направлении, перпендикулярном линии поддержки. Сигнал разности фаз - это величина, пропорциональная удельному массовому расходу. Когда частота возбуждения поддерживается постоянной, сигнал разности фаз может детектироваться как сигнал разности времен в положениях наблюдения измерительной трубки.
Когда переменная частота возбуждения измерительной трубки задана равной собственной частоте измерительной трубки, получается постоянная частота возбуждения, соответствующая плотности измеряемой текучей среды, и, следовательно, измерительная трубка может возбуждаться с помощью небольшой энергии возбуждения. Соответственно, в последнее время измерительная трубка, в общем, возбуждается при собственной частоте, и сигнал разности фаз детектируется как сигнал разности времен.
Кориолисов расходомер с прямыми трубками имеет конструкцию, в которой в случае, когда вибрация прикладывается в направлении, перпендикулярном оси прямой трубки центрального участка прямой трубки, поддерживаемой с обоих концов, разность смещения прямой трубки, которая вызывается посредством кориолисовой силы, т.е. сигнал разности фаз, получается между опорным участком и центральным участком прямой трубки, и удельный массовый расход детектируется на основе сигнала разности фаз. Кориолисов расходомер с прямыми трубками, как описано выше, имеет простую, компактную и жесткую конструкцию. Тем не менее, кориолисов расходомер также имеет проблему в том, что высокая чувствительность детектирования не может быть достигнута.
В отличие от этого, кориолисов расходомер с изогнутыми трубками превосходит кориолисов расходомер с прямыми трубками в том, что может выбираться форма для эффективного исключения кориолисовой силы. Удельный массовый расход может фактически детектироваться с высокой чувствительностью.
Комбинация катушки и магнита, в общем, используется в качестве средства возбуждения для возбуждения расходомерной трубки. Катушка и магнит предпочтительно прикрепляются в положениях, которые не смещаются в направлении вибрации расходомерной трубки, поскольку отклонение от взаимного расположения между катушкой и магнитом минимизируется. Следовательно, в случае кориолисова расходомера с изогнутыми трубками, включающего в себя две параллельные расходомерные трубки, две параллельные расходомерные трубки прикрепляются так, чтобы размещаться между катушкой и магнитом. Следовательно, конструкция выполнена таким образом, что две расположенные напротив расходомерные трубки отстоят друг от друга с таким интервалом, чтобы размещаться, по меньшей мере, между катушкой и магнитом.
Из кориолисовых расходомеров, включающих в себя две расходомерные трубки, расположенные в параллельных плоскостях, кориолисов расходомер, имеющий большой диаметр, или кориолисов расходомер, имеющий высокую жесткость расходомерной трубки, требует повышения мощности средства возбуждения, и, следовательно, необходимо размещать крупное средство возбуждения между двумя расходомерными трубками. Соответственно, конструкция выполнена таким образом, что зазор между расходомерными трубками обязательно расширяется даже на закрепленном концевом участке, который является базовым участком расходомерных трубок.
Как проиллюстрировано на фиг.16, кориолисов расходомер 1, который является общеизвестным и включает в себя U-образные измерительные трубки, включает в себя детектор 4 для двух U-образных измерительных трубок 2 и 3 и преобразователь 5.
Детектор 4 для измерительных трубок 2 и 3 включает в себя вибратор 6 для резонансной вибрации измерительных трубок 2 и 3, левый датчик 7 скорости для детектирования скорости вибрации, генерируемой на левой стороне измерительных трубок 2 и 3, вибрирующих посредством вибратора 6, правый датчик 8 скорости для детектирования скорости вибрации, генерируемой на правой стороне измерительных трубок 2 и 3, вибрирующих посредством вибратора 6, и температурный датчик 9 для детектирования температуры измеряемой текучей среды, которая протекает через измерительные трубки 2 и 3, при детектировании скорости вибрации. Вибратор 6, левый датчик 7 скорости, правый датчик 8 скорости и температурный датчик 9 соединяются с преобразователем 5.
Измеряемая текучая среда, которая протекает через измерительные трубки 2 и 3 кориолисова расходомера 1, протекает с правой стороны измерительных трубок 2 и 3 (стороны, на которой предусмотрен правый датчик 8 скорости) в левую сторону (сторону, на которой предусмотрен левый датчик 7 скорости).
Следовательно, сигнал скорости, детектируемый посредством правого датчика 8 скорости, является сигналом скорости на входе измеряемой текучей среды, протекающей в измерительные трубки 2 и 3. Сигнал скорости, детектируемый посредством левого датчика 7 скорости, является сигналом скорости на выходе измеряемой текучей среды, вытекающей из измерительных трубок 2 и 3.
Каждый из левого датчика 7 скорости и правого датчика 8 скорости, которые детектируют скорости вибрации, могут быть датчиками ускорения.
Преобразователь 5 кориолисова расходомера имеет блочную структуру, показанную на фиг.17.
Преобразователь 5 кориолисова расходомера включает в себя модуль 10 управления возбуждением, модуль 11 измерения фазы и модуль 12 измерения температуры.
Таким образом, преобразователь 5 кориолисова расходомера имеет порт 15 ввода и вывода. Выходной вывод 16 сигнала возбуждения, включенный в модуль 10 управления возбуждением, предусмотрен в порту 15 ввода и вывода. Модуль 10 управления возбуждением выводит заранее определенный сигнал режима от выходного вывода 16 сигнала возбуждения в вибратор 6, прикрепленный к измерительным трубкам 2 и 3, для резонансной вибрации измерительных трубок 2 и 3.
Выходной вывод 16 сигнала возбуждения соединяется со схемой 18 возбуждения через усилитель 17. Схема 18 возбуждения формирует сигнал возбуждения для резонансной вибрации измерительных трубок 2 и 3 и выводит сигнал возбуждения в усилитель 17. Усилитель усиливает входной сигнал возбуждения и выводит сигнал возбуждения на выходной вывод 16 сигнала возбуждения. Сигнал возбуждения, выводимый из усилителя 17, выводится из выходного вывода 16 сигнала возбуждения в вибратор 6.
Входной вывод 19 для левого сигнала скорости, в который вводится сигнал детектирования скорости вибрации, генерируемой на левой стороне измерительных трубок 2 и 3, вибрирующих посредством вибратора 6, предусмотрен в порту 15 ввода и вывода. Входной вывод 19 для левого сигнала скорости включен в модуль 11 измерения фазы.
Входной вывод 20 для правого сигнала скорости, в который вводится сигнал детектирования скорости вибрации, генерируемой на правой стороне измерительных трубок 2 и 3, вибрирующих посредством вибратора 6, предусмотрен в порту 15 ввода и вывода. Входной вывод 20 для правого сигнала скорости включен в модуль 11 измерения фазы.
Модуль 11 измерения фазы выполняет аналогово-цифровое преобразование для сигналов вибрации пары датчиков скорости в случае, когда заранее определенный сигнал режима выводится из выходного вывода 16 сигнала возбуждения в вибратор 6, прикрепленный к измерительным трубкам 2 и 3, чтобы вызывать вибрацию в измерительных трубках 2 и 3 посредством вибратора 6, чтобы тем самым выполнять обработку цифрового преобразования, и затем получает разность фаз между преобразованными сигналами.
Входной вывод 19 для левого сигнала скорости соединяется с входным выводом усилителя 21. Выходной вывод усилителя 21 соединяется с аналого-цифровым преобразователем 22. Аналого-цифровой преобразователь 22 преобразует в цифровое значение аналоговый сигнал, полученный посредством усиления сигнала вибрации, выводимого из входного вывода 19 для левого сигнала скорости, посредством усилителя 21.
Аналого-цифровой преобразователь 22 соединяется с вычислительным устройством 23.
Дополнительно, входной вывод 20 для правого сигнала скорости соединяется с входным выводом усилителя 24. Выходной вывод усилителя 24 соединяется с аналого-цифровым преобразователем 25. Аналого-цифровой преобразователь 25 преобразует, в цифровое значение, аналоговый сигнал, полученный посредством усиления сигнала вибрации, выводимого из входного контактного вывода 20 для правого сигнала скорости, посредством усилителя 24.
Дополнительно, цифровой сигнал, выводимый из аналого-цифрового преобразователя 25, вводится в вычислительное устройство 23.
Дополнительно, входной вывод 26 сигнала температуры, включенный в модуль 11 измерения температуры, в который вводится значение детектирования от температурного датчика 9, предусмотрен в порту 15 ввода и вывода. Модуль 12 измерения температуры выполняет температурную компенсацию в трубках на основе температуры детектирования, полученной посредством температурного датчика 9, который предусмотрен в измерительных трубках 2 и 3, и детектирует внутреннюю температуру измерительных трубок 2 и 3.
Резистивный температурный датчик, в общем, используется в качестве температурного датчика 9, чтобы измерять значение сопротивления, чтобы тем самым вычислять температуру.
Входной вывод 26 сигнала температуры соединяется со схемой 27 измерения температуры. Схема 27 измерения температуры вычисляет внутреннюю температуру измерительных трубок 2 и 3 на основе значения сопротивления, выводимого от температурного датчика 9. Внутренняя температура измерительных трубок 2 и 3, которая вычисляется посредством схемы 27 измерения температуры, вводится в вычислительное устройство 23.
В способе измерения фазы с использованием кориолисова расходомера 1, как описано выше, вибрация прикладывается в первичном режиме к измерительным трубкам 2 и 3 от вибратора 6, прикрепленного к измерительным трубкам 2 и 3. Когда измеряемая текучая среда протекает в измерительные трубки 2 и 3 в то время, когда применяется вибрация, фазовый режим формируется в измерительных трубках 2 и 3.
Следовательно, сигнал (сигнал скорости на входе) из правого датчика 8 скорости и сигнал (сигнал скорости на выходе) из левого датчика 7 скорости в кориолисовом расходомере 1 выводятся как форма, в которой два сигнала накладываются друг на друга. Сигнал, выводимый как форма, в которой два сигнала накладываются друг на друга, включает в себя не только сигнал расхода, но также и большое число излишних составляющих шума. Помимо этого, частота изменяется в зависимости, например, от изменения плотности измеряемой текучей среды.
Следовательно, необходимо исключать излишний сигнал из сигналов от правого датчика 8 скорости и левого датчика 7 скорости. Тем не менее, чтобы вычислить фазу, очень трудно исключать излишний сигнал из сигналов от правого датчика 8 скорости и левого датчика 7 скорости.
Дополнительно, кориолисов расходомер 1 зачастую должен иметь сверхвысокоточное измерение и высокую скорость отклика. Чтобы удовлетворять таким требованиям, необходимо вычислительное устройство, имеющее поддержку очень сложных вычислений и высокую производительность обработки, и, следовательно, сам кориолисов расходомер 1 является очень дорогим.
Таким образом, кориолисов расходомер 1 требует установленного способа измерения разности фаз с использованием как оптимального фильтра, всегда соответствующего частоте измерений, так и способа высокоскоростных вычислений.
В традиционных способах измерения разности фаз с вычислением расхода, способ обработки с помощью фильтра с исключением шума разделяется на способ с использованием аналогового фильтра и способ с использованием цифрового фильтра.
Способ с использованием аналогового фильтра может быть относительно недорогим (см., например, патентный документ 1 и патентный документ 2). Тем не менее, патентный документ 1 и патентный документ 2 имеют предел повышения производительности фильтра, и, следовательно, имеется проблема в том, что фильтр является недостаточным для кориолисова расходомера.
В последние годы создано большое число кориолисовых расходомеров с использованием обработки цифровых сигналов, и способ с использованием цифрового фильтра создан в качестве способа обработки с помощью фильтра с исключением шума в традиционных способах измерения разности фаз при вычислении расхода.
Примеры традиционных типов кориолисовых расходомеров с использованием обработки цифровых сигналов включают в себя способ измерения фазы с использованием преобразования Фурье (см., например, патентный документ 3) и способ выбора оптимальной таблицы, соответствующей входной частоте, из таблиц фильтров, включающих в себя режекторный фильтр и полосовой фильтр, чтобы измерять фазу (см., например, патентный документ 4 и патентный документ 5).
Способ измерения фазы с использованием преобразования Фурье
Преобразователь кориолисова расходомера на основе способа измерения фазы с использованием преобразования Фурье имеет блочную структуру, как проиллюстрировано на фиг.18.
На фиг.18, входной вывод 19 левого сигнала скорости, предусмотренный в порту 15 ввода и вывода, в который вводится сигнал детектирования скорости вибрации (сигнал скорости на выходной стороне), который формируется на левой стороне измерительных трубок 2 и 3, вибрирующих посредством вибратора 6, и который детектируется посредством левого датчика 7 скорости, соединяется с фильтром 30 нижних частот. Фильтр 30 нижних частот является схемой для извлечения, с помощью частотного фильтра, только левого низкочастотного сигнала скорости (сигнала скорости на выходной стороне) из левого сигнала скорости (сигнала скорости на выходной стороне), выводимого из левого датчика 7 скорости, определяющего скорость вибрации, генерируемую на левой стороне измерительных трубок 2 и 3, в случае если измерительные трубки 2 и 3 вибрируют посредством вибратора 6.
Фильтр 30 нижних частот соединяется с аналого-цифровым преобразователем 31. Аналого-цифровой преобразователь 31 преобразует, в цифровой сигнал, левый сигнал скорости, который является аналоговым сигналом, выводимым из фильтра 30 нижних частот. Левый сигнал скорости, полученный преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал, вводится в модуль 32 измерения разности фаз.
Аналого-цифровой преобразователь 31 соединяется с генератором 33 тактовых импульсов. Генератор 33 тактовых импульсов формирует синхронизацию дискретизации M раз (M - это натуральное число) входной частоты.
С другой стороны, входной вывод 20 правого сигнала скорости, предусмотренный в порту 15 ввода и вывода, в который вводится сигнал детектирования скорости вибрации (сигнал скорости на входной стороне), который формируется на правой стороне измерительных трубок 2 и 3, вибрирующих посредством вибратора 6, и который детектируется посредством правого датчика 8 скорости, соединяется с фильтром 34 нижних частот. Фильтр 34 нижних частот является схемой для извлечения, с помощью частотного фильтра, только низкочастотного правого сигнала скорости (сигнала скорости на входной стороне) из правого сигнала скорости (сигнала скорости на входной стороне), выводимого из правого датчика 8 скорости, детектирующего скорость вибрации, генерируемую на правой стороне измерительных трубок 2 и 3, в случае если измерительные трубки 2 и 3 вибрируют посредством вибратора 6.
Фильтр 34 нижних частот соединяется с аналого-цифровым преобразователем 35. Аналого-цифровой преобразователь 35 преобразует, в цифровой сигнал, правый сигнал скорости, который является аналоговым сигналом, выводимым из фильтра 34 нижних частот. Правый сигнал скорости, полученный преобразованием посредством аналого-цифрового преобразователя 35 как цифровой сигнал, вводится в модуль 32 измерения разности фаз.
Дополнительно, аналого-цифровой преобразователь 35 соединяется с генератором 33 тактовых импульсов. Генератор 33 тактовых импульсов формирует синхронизацию дискретизации M раз (M - это натуральное число) входной частоты.
Дополнительно, входной вывод 20 правого сигнала скорости, предусмотренный в порту 15 ввода и вывода, в который вводится сигнал детектирования скорости вибрации (сигнал скорости на входной стороне), который формируется на правой стороне измерительных трубок 2 и 3, вибрирующих посредством вибратора 6, и который детектируется посредством правого датчика 8 скорости, соединяется с модулем 36 измерения частоты. Модуль 36 измерения частоты измеряет частоту сигнала детектирования скорости вибрации (сигнала скорости на входной стороне), который формируется на правой стороне измерительных трубок 2 и 3, вибрирующих посредством вибратора 6, и который детектируется посредством правого датчика 8 скорости.
Модуль 36 измерения частоты соединяется с генератором 33 тактовых импульсов. Частота, измеряемая посредством модуля 36 измерения частоты, выводится в генератор 33 тактовых импульсов. Синхронизация дискретизации M раз (M - это натуральное число) входной частоты формируется посредством генератора 33 тактовых импульсов и выводится в аналого-цифровые преобразователи 31 и 35.
Модуль 32 измерения разности фаз, генератор 33 тактовых импульсов и модуль 36 измерения частоты включены в вычислительное устройство 40 измерения фазы.
В способе измерения фазы с использованием преобразования Фурье, как проиллюстрировано на фиг.18, входной сигнал (сигнал скорости на входе) из правого датчика 8 скорости сначала вводится в модуль 36 измерения частоты, чтобы измерять частоту. Частота, измеряемая посредством модуля 36 измерения частоты, вводится в генератор 33 тактовых импульсов. Синхронизация дискретизации M раз (M - это натуральное число) входной частоты формируется посредством генератора 33 тактовых импульсов и вводится в аналого-цифровые преобразователи 31 и 35.
Дополнительно, сигнал детектирования скорости вибрации (сигнал скорости на выходной стороне), который формируется на левой стороне измерительных трубок 2 и 3 и получается преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал, и сигнал детектирования скорости вибрации (сигнал скорости на входной стороне), который формируется на правой стороне измерительных трубок 2 и 3 и получается преобразованием посредством аналого-цифрового преобразователя 35 как цифровой сигнал, вводятся в модуль 32 измерения разности фаз. Сигналы детектирования подвергаются преобразованию Фурье посредством модуля дискретного преобразования Фурье, включенного в модуль 32 измерения разности фаз, и разность фаз вычисляется на основе соотношения между действительной составляющей и мнимой составляющей преобразованных сигналов.
Способ измерения фазы с использованием цифрового фильтра
Преобразователи кориолисова расходомера на основе способа измерения фазы с использованием цифрового фильтра описаны в отношении структурных блок-схем, проиллюстрированных на фиг.19 и 20.
Средство выбора частоты, такое как режекторный фильтр или полосовой фильтр, используется в качестве цифрового фильтра. Отношение "сигнал-шум" входного сигнала улучшается с использованием средства выбора частоты, такого как режекторный фильтр или полосовой фильтр.
Фиг.19 иллюстрирует блочную структуру преобразователя кориолисова расходомера с использованием режекторного фильтра в качестве цифрового фильтра.
Порт 15 ввода и вывода, входной вывод 19 левого сигнала скорости, входной вывод 20 правого сигнала скорости, фильтры 30 и 34 нижних частот и аналого-цифровые преобразователи 31 и 35, как проиллюстрировано на фиг.19, имеют структуры, идентичные структурам порта 15 ввода и вывода, входного вывода 19 левого сигнала скорости, входного вывода 20 правого сигнала скорости, фильтров 30 и 34 нижних частот и аналого-цифровых преобразователей 31 и 35, как проиллюстрировано на фиг.18, соответственно.
На фиг.19 аналого-цифровой преобразователь 31 соединяется с режекторным фильтром 51. Режекторный фильтр 51 выбирает частоту на основе левого сигнала скорости, который получается преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал, чтобы улучшать отношение "сигнал-шум" входного сигнала, который должен выводиться.
Режекторный фильтр 51 соединяется с модулем 52 измерения фазы. Модуль 52 измерения фазы измеряет фазу левого сигнала скорости, который получается как цифровой сигнал посредством преобразования и который имеет улучшенное отношение "сигнал-шум" посредством режекторного фильтра 51.
Дополнительно, режекторный фильтр 51 соединяется с модулем 53 измерения частоты. Модуль 53 измерения частоты измеряет частоту левого сигнала скорости, который получается как цифровой сигнал посредством преобразования и который имеет улучшенное отношение "сигнал-шум" посредством режекторного фильтра 51.
Частота, измеряемая посредством модуля 53 измерения частоты, вводится в режекторный фильтр 51.
Дополнительно, аналого-цифровой преобразователь 35 соединяется с режекторным фильтром 54. Режекторный фильтр 54 выбирает частоту на основе левого сигнала скорости, который получается преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал, чтобы улучшать отношение "сигнал-шум" входного сигнала, который должен выводиться.
Режекторный фильтр 54 соединяется с модулем 52 измерения фазы. Модуль 52 измерения фазы измеряет фазу правого сигнала скорости, который получается преобразованием как цифровой сигнал и который имеет улучшенное отношение "сигнал-шум" посредством режекторного фильтра 54.
Дополнительно, частота, измеряемая посредством модуля 53 измерения частоты, вводится в режекторный фильтр 54.
На фиг.19 задающий генератор 55 используется для синхронизации и ввода в аналого-цифровые преобразователи 31 и 35, чтобы синхронизировать аналого-цифровой преобразователь 31 и аналого-цифровой преобразователь 35 друг с другом.
Режекторные фильтры 51 и 54, модуль 52 измерения разности фаз, модуль 53 измерения частоты и задающий генератор 55 включены в вычислительное устройство 50 измерения фазы.
Фиг.20 иллюстрирует блочную структуру преобразователя кориолисова расходомера с использованием полосового фильтра (BPF) в качестве цифрового фильтра.
Порт 15 ввода и вывода, входной вывод 19 левого сигнала скорости, входной вывод 20 правого сигнала скорости, фильтры 30 и 34 нижних частот и аналого-цифровые преобразователи 31 и 35, как проиллюстрировано на фиг.20, имеют структуры, идентичные структурам порта 15 ввода и вывода, входного вывода 19 левого сигнала скорости, входного вывода 20 правого сигнала скорости, фильтров 30 и 34 нижних частот и аналого-цифровых преобразователей 31 и 35, как проиллюстрировано на фиг.19, соответственно.
На фиг.20 аналого-цифровой преобразователь 31 соединяется с полосовым фильтром (BPF) 61. Полосовой фильтр 61 является схемой для извлечения, с помощью частотного фильтра, только левого сигнала скорости, имеющего заданную частоту (сигнал скорости на выходной стороне) из левого сигнала скорости (сигнала скорости на выходной стороне), который выводится из левого датчика 7 скорости, детектирующего скорость вибрации, сформированную на левой стороне измерительных трубок 2 и 3, и который получается преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал, в случае если измерительные трубки 2 и 3 вибрируют посредством вибратора 6.
Полосовой фильтр 61 соединяется с модулем 62 измерения фазы. Модуль 62 измерения фазы измеряет фазу левого сигнала скорости, который получается преобразованием как цифровой сигнал и который имеет улучшенное отношение "сигнал-шум" посредством полосового фильтра 61.
Дополнительно, полосовой фильтр 61 соединяется с модулем 63 измерения частоты. Модуль 63 измерения частоты измеряет частоту левого сигнала скорости, который получается преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал и который имеет улучшенное отношение "сигнал-шум" посредством полосового фильтра 61.
Частота, измеряемая посредством модуля 63 измерения частоты, вводится в полосовой фильтр 61.
Дополнительно, аналого-цифровой преобразователь 35 соединяется с полосовым фильтром 64. Полосовой фильтр 64 является схемой для извлечения, с помощью частотного фильтра, только правого сигнала скорости, имеющего заданную частоту (сигнал скорости на входной стороне) из правого сигнала скорости (сигнала скорости на входной стороне), который выводится из правого датчика 8 скорости, детектирующего скорость вибрации, генерируемую на правой стороне измерительных трубок 2 и 3, и который получается преобразованием посредством аналого-цифрового преобразователя 35 как цифровой сигнал, в случае если измерительные трубки 2 и 3 вибрируют посредством вибратора 6.
Полосовой фильтр 64 соединяется с модулем 62 измерения фазы. Модуль 62 измерения фазы измеряет фазу левого сигнала скорости, который получается преобразованием как цифровой сигнал и который имеет улучшенное отношение "сигнал-шум" посредством полосового фильтра 64.
Полосовой фильтр 64 соединяется с модулем 63 измерения частоты. Частота, измеряемая посредством модуля 63 измерения частоты, вводится в полосовой фильтр 64.
На фиг.20 задающий генератор 65 используется для синхронизации, и синхросигнал из задающего генератора 65 вводится в аналого-цифровые преобразователи 31 и 35, чтобы синхронизировать аналого-цифровой преобразователь 31 и аналого-цифровой преобразователь 35 друг с другом.
Полосовые фильтры 61 и 64, модуль 62 измерения фазы, модуль 63 измерения частоты и задающий генератор 65 включены в вычислительное устройство измерения фазы 60.
Патентные документы, указанные выше:
Патентный документ 1. JP 02-66410 A;
Патентный документ 2. JP 10-503017 A;
Патентный документ 3. JP 2799243 B;
Патентный документ 4. JP 2930430 B;
Патентный документ 5. JP 3219122 B.
Краткое изложение сущности изобретения
В способе измерения фазы с использованием преобразования Фурье, как описано в патентном документе 3, когда входная частота входного сигнала детектирования скорости вибрации является постоянной, может осуществляться способ измерения фазы, имеющий избирательность в области сверхвысоких частот, поскольку преобразование Фурье используется для выбора частоты.
Тем не менее, в способе с использованием преобразования Фурье, как описано в патентном документе 3, когда входная частота входного сигнала детектирования скорости вибрации изменяется согласно плотности или температуре, необходимо изменять способ преобразования или частоту дискретизации. Следовательно, вычислительный цикл или способ вычисления изменяется, и, следовательно, значение измерения варьируется и тем самым является нестабилизированным.
Помимо этого, в способе с использованием преобразования Фурье, как описано в патентном документе 3, когда входная частота входного сигнала детектирования скорости вибрации изменяется согласно плотности или температуре, необходимо точно синхронизировать частоту дискретизации с входной частотой входного сигнала скорости вибрации, и, следовательно, конструкция является очень усложненной.
Следовательно, имеется проблема в том, что, когда температура измеряемой текучей среды быстро изменяется, или плотность быстро изменяется посредством подмешивания воздушных пузырьков в текучую среду, точность измерений существенно снижается.
Дополнительно, способ с использованием преобразования Фурье, как описано в патентном документе 3, имеет проблему в том, что объем вычислительной обработки становится очень большим вследствие выполнения преобразования Фурье.
В способах выбора оптимальной таблицы, соответствующей входной частоте, из таблиц фильтров, включающих в себя режекторный фильтр и полосовой фильтр, для измерения фазы, как описано в патентном документе 4 и патентном документе 5, когда частота дискретизации удерживается, конструкция может упрощаться.
Тем не менее, аналогично способу с использованием преобразования Фурье, как описано в патентном документе 3, способы измерения фазы с использованием цифрового фильтра, как описано в патентном документе 4 и патентном документе 5, требуют очень большого числа таблиц фильтров, соответствующих измененным входным частотам, и, следовательно, имеют проблему в том, что объем используемой памяти вычислительного устройства является большим.
Помимо этого, способы измерения фазы с использованием цифрового фильтра, как описано в патентном документе 4 и патентном документе 5, имеют проблему в том, что трудно выбирать оптимальный фильтр в случае, когда входная частота быстро изменяется.
Дополнительно, способы измерения фазы с использованием цифрового фильтра, как описано в патентном документе 4 и патентном документе 5, имеют проблему в том, что варьирующийся большой объем вычислений требуется для того, чтобы повышать производительность выбора частоты.
Способы измерения фазы с использованием цифрового фильтра, как описано в патентном документе 4 и патентном документе 5, имеют следующие проблемы.
1) Способ не может соответствовать изменению входной частоты с высокой точностью. Таким образом, очень трудно реализовывать измерение в случае, когда плотность текучей среды, которая должна измеряться, быстро изменяется вследствие подмешивания воздушных пузырьков.
2) Чтобы повышать производительность выбора частоты, требуется большой объем вычислений. Следовательно, трудно реализовывать значительное быстродействие, и, следовательно, способ является неподходящим для пакетной обработки в течение короткого периода времени.
3) Объем используемой памяти вычислительного устройства является большим, и, следовательно, конструкция является усложненной. Соответственно, схемная структура и конструкция является усложненной и очень невыгодной по затратам.
Когда все факторы учитываются, в любом из традиционных способов измерения фазы, включающих в себя обработку с помощью цифрового фильтра, шум полосы частот, отличных от частот трубки измерительных трубок 2 и 3, исключается, и, следовательно, переключение таблицы фильтров, изменение способа вычисления и изменение частоты дискретизации всегда должно соответствовать частотам трубки измерительных трубок 2 и 3. Соответственно, имеется проблема в том, что необходимо выполнять вычисление, которое является очень усложненным и имеет недостаточное быстродействие.
Таким образом, когда измерительные трубки 2 и 3 вибрируют посредством вибратора 6, с большой вероятностью формируется ошибка в вычислениях при каждом изменении входных частот сигналов скорости вибрации, которые детектируются посредством правого датчика 8 скорости для детектирования скорости вибрации, сгенерированной на правой стороне измерительных трубок 2 и 3, и левого датчика 7 скорости для детектирования скорости вибрации, сгенерированной на левой стороне измерительных трубок 2 и 3, и, следовательно, имеется проблема в том, что точность измерений является очень низкой.
Краткое изложение сущности изобретения
Задача настоящего изобретения состоит в создании способа обработки сигналов, устройства обработки сигналов и кориолисова расходомера, в которых, даже когда температура измеряемой текучей среды изменяется, даже когда воздушные пузырьки подмешиваются к измеряемой текучей среде, или даже когда измеряемая текучая среда быстро переходит из газообразной в жидкую форму, измерение всегда может быть выполнено с постоянной точностью, реализовано измерение фазы с высокой производительностью фильтрации, и объем вычислительной обработки может быть существенно уменьшен.
Способ обработки сигналов, описанный в пункте 1, который предусмотрен для решения вышеуказанных проблем, является способом обработки сигналов для кориолисова расходомера, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая включена в измерительную расходомерную трубку, управляется посредством устройства возбуждения с использованием вибратора для попеременного возбуждения, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, причем разность фаз и/или частота вибрации, пропорциональная кориолисовой силе, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, детектируется посредством датчиков скорости или датчиков ускорения, которые являются парой датчиков детектирования вибрации, предусмотренных на правой стороне или левой стороне, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, когда, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок вибрируют, чтобы тем самым получать удельный массовый расход и/или плотность измеряемой текучей среды,
при этом способ обработки сигналов включает в себя:
первый этап, на котором преобразуют аналоговые сигналов, выводимые из пары датчиков детектирования вибрации в цифровые сигналы;
второй этап, на котором выполняют преобразования частоты для двух цифровых сигналов, которые получаются посредством преобразования на первом этапе и соответствуют паре датчиков детектирования вибрации;
третий этап, на котором измеряют частоту на основе одного цифрового сигнала из двух цифровых сигналов, которые получаются посредством преобразования на первом этапе и соответствуют паре датчиков детектирования вибрации; и
четвертый этап, на котором формируют частотный сигнал, соответствующий 1/N от цифрового сигнала частоты, измеренного на третьем этапе,
причем способ обработки сигналов характеризуется тем, что разность фаз между сигналами детектирования из пары датчиков детектирования вибрации определяют на основе частотного сигнала, соответствующего 1/N от цифрового сигнала, который формируется на четвертом этапе.
Способ обработки сигналов, описанный в пункте 2, который предусмотрен для того, чтобы разрешать вышеуказанные проблемы, является способом обработки сигналов по п.1, характеризующимся тем, что на этапе формирования частотного сигнала, соответствующего 1/N от цифрового сигнала частоты θ, который выводят из модуля измерения частоты, частоту θx получают для преобразования частоты так, чтобы удовлетворять θ/N=θ-θx.
Способ обработки сигналов, описанный в пункте 3, который предусмотрен для того, чтобы разрешать вышеуказанные проблемы, является способом обработки сигналов по п.1, характеризующимся тем, что N определяют таким образом, что частотный сигнал, соответствующий 1/N от цифрового сигнала частоты θ, который выводят из модуля измерения частоты, составляет менее 50 Гц.
Устройство обработки сигналов, описанное в пункте 4, которое предусмотрено для того, чтобы разрешать вышеуказанные проблемы, является устройством обработки сигналов для кориолисова расходомера, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая включена в измерительную расходомерную трубку, управляется посредством устройства возбуждения с использованием вибратора для попеременного возбуждения, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, причем разность фаз и/или частота вибрации, пропорциональная кориолисовой силе, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, детектируется посредством датчиков скорости или датчиков ускорения, которые являются парой датчиков детектирования вибрации, предусмотренных на правой стороне и левой стороне, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, когда, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок вибрируют, чтобы тем самым получать удельный массовый расход и/или плотность измеряемой текучей среды,
при этом устройство обработки сигналов включает в себя:
аналого-цифровые преобразователи для преобразования аналоговых сигналов, выводимых из пары датчиков детектирования вибрации в цифровые сигналы;
пару квадратурных частотных модуляторов для выполнения преобразования частоты для двух цифровых сигналов, которые выводятся из аналого-цифровых преобразователей и соответствуют паре датчиков детектирования вибрации;
модуль измерения частоты для измерения частоты на основе одного цифрового сигнала из двух цифровых сигналов, которые выводятся из аналого-цифровых преобразователей и соответствуют паре датчиков детектирования вибрации; и
передающее устройство для формирования частотного сигнала, соответствующего θ(1-1/N) от цифрового сигнала частоты, выводимого из модуля измерения частоты,
причем устройство обработки сигналов характеризуется тем, что оно выполнено с возможностью получения разности фаз на основе сигналов, сформированных посредством пары квадратурных частотных модуляторов.
Устройство обработки сигналов, описанное в пункте 5, которое предусмотрено для того, чтобы разрешать вышеуказанные проблемы, является устройством обработки сигналов по п.4, характеризующимся тем, что модуль измерения частоты для измерения частоты на основе одного цифрового сигнала из двух цифровых сигналов, которые выводятся из аналого-цифровых преобразователей и соответствуют датчикам скорости или датчикам ускорения, которые являются парой датчиков детектирования вибрации, имеет контур фазовой синхронизации (PLL) для измерения частоты.
Кориолисов расходомер, описанный в пункте 6, который предусмотрен для того, чтобы разрешать вышеуказанные проблемы, является кориолисовым расходомером, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая включена в измерительную расходомерную трубку, управляется посредством устройства возбуждения с использованием вибратора для попеременного возбуждения, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, причем разность фаз и/или частота вибрации, пропорциональная кориолисовой силе, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, детектируется посредством датчиков детектирования вибрации, когда, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок вибрируют, чтобы тем самым получать удельный массовый расход и/или плотность измеряемой текучей среды,
при этом кориолисов расходомер характеризуется тем, что включает в себя устройство обработки сигналов, включающее в себя:
аналого-цифровые преобразователи для преобразования аналоговых сигналов, выводимых из пары датчиков детектирования вибрации в цифровые сигналы;
пару квадратурных частотных модуляторов для выполнения преобразования частоты для двух цифровых сигналов, которые выводятся из аналого-цифровых преобразователей и соответствуют паре датчиков детектирования вибрации;
модуль измерения частоты для измерения частоты на основе одного цифрового сигнала из двух цифровых сигналов, которые выводятся из аналого-цифровых преобразователей и соответствуют паре датчиков детектирования вибрации; и
передающее устройство для формирования частотного сигнала, соответствующего θ(1-1/N) от цифрового сигнала частоты, выводимого из модуля измерения частоты,
причем устройство обработки сигналов характеризуется тем, что оно выполнено с возможностью получения разности фаз на основе сигналов, сформированных посредством пары квадратурных частотных модуляторов.
Измерительная трубка кориолисова расходомера имеет различные формы. Например, предусмотрена изогнутая трубка и прямая трубка. Предусмотрен тип, возбуждаемый в любом из различных режимов, включающих в себя первичный режим и вторичный режим, в качестве режима для возбуждения измерительной трубки.
Хорошо известно, что полоса частот возбуждения, полученная из измерительной трубки, составляет от нескольких десятков Гц до нескольких кГц. Например, когда измерительная трубка с использованием U-образной трубки вибрирует в первичном режиме, частота составляет приблизительно 100 Гц. Когда измерительная трубка, имеющая прямую форму, вибрирует в первичном режиме, реализуется приблизительно 500-1000 Гц.
Тем не менее, очень трудно выполнять измерение фазы кориолисова расходомера всегда посредством идентичной обработки в полосе частот от нескольких десятков Гц до нескольких кГц в одном преобразователе расходомера. Следовательно, необходимо отдельно проектировать несколько типов.
Согласно способу обработки сигналов в настоящем изобретении, существенные проблемы, как описано выше, могут исключаться посредством преимущественной обработки сигналов на основе алгоритма идентификации. Даже в случае изменения температуры измеряемой текучей среды, подмешивания воздушных пузырьков или быстрого перехода измеряемой текучей среды из газообразной в жидкую форму, измерение всегда может выполняться с постоянной точностью. Измерение фазы с высокой производительностью фильтрации является преимущественным, и, следовательно, может быть обеспечена высокая эффективность.
Согласно устройству обработки сигналов в настоящем изобретении, даже когда температура измеряемой текучей среды изменяется, даже когда воздушные пузырьки подмешиваются в измеряемую текучую среду, или даже когда измеряемая текучая среда быстро переходит из газообразной в жидкую форму, стабильное измерение всегда может выполняться с постоянной точностью, и может быть реализовано измерение фазы с высокой производительностью фильтрации при небольшом объеме вычислительной обработки.
Согласно кориолисову расходомеру в настоящем изобретении, даже когда температура измеряемой текучей среды изменяется, даже когда воздушные пузырьки подмешиваются в измеряемую текучую среду, или даже когда измеряемая текучая среда быстро переходит из газообразной в жидкую форму, стабильное измерение всегда может выполняться с постоянной точностью, и может быть реализовано измерение фазы с высокой производительностью фильтрации при небольшом объеме вычислительной обработки.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает блок-схему, иллюстрирующую принцип способа и устройства обработки сигналов, согласно настоящему изобретению;
Фиг.2 изображает диаграмму, иллюстрирующую форму частотного сигнала кориолисова расходомера, частота возбуждения которого составляет 100 Гц, и форму частотного сигнала кориолисова расходомера, частота возбуждения которого составляет 1000 Гц, в устройстве обработки сигналов, проиллюстрированном на фиг.1;
Фиг.3 изображает диаграмму, иллюстрирующую форму частотного сигнала в случае, если частота возбуждения кориолисова расходомера, частота возбуждения которого составляет 100 Гц, разделяется;
Фиг.4 изображает диаграмму, иллюстрирующую форму частотного сигнала в случае, если частота возбуждения кориолисова расходомера, частота возбуждения которого составляет 100 Гц, сдвигается;
Фиг.5 изображает структурную схему, иллюстрирующую устройство обработки сигналов, показанное на фиг.1;
Фиг.6 изображает диаграмму, иллюстрирующую сигнал детектирования скорости вибрации, который формируется на левой стороне измерительных трубок и выводится из фильтра нижних частот, показанного на фиг.5;
Фиг.7 изображает диаграмму, иллюстрирующую сигнал, полученный как цифровой сигнал, посредством дискретизации, с произвольными постоянными интервалами, сигнала, показанного на фиг.6, который выводится из аналого-цифрового преобразователя, показанного на фиг.5;
Фиг.8 изображает диаграмму, иллюстрирующую частотный сигнал (θXn) передачи, выводимый из передающего устройства, показанного на фиг.5;
Фиг.9 изображает диаграмму, иллюстрирующую сигнал со сдвигом на 90 градусов выходного сигнала (cosθ), который выводится из аналого-цифрового преобразователя и формируется во внутренней части квадратурного модулятора, показанного на фиг.5;
Фиг.10 изображает диаграмму, иллюстрирующую сигнал со сдвигом на 90 градусов выходного сигнала (cosθXn), который выводится из передающего устройства и формируется во внутренней части квадратурного модулятора, показанного на фиг.5;
Фиг.11 изображает диаграмму, иллюстрирующую сигнал, полученный посредством квадратурного преобразования частоты посредством квадратурного модулятора, показанного на фиг.5;
Фиг.12 изображает временные диаграммы для конкретной структуры устройства обработки сигналов, показанного на фиг.5;
Фиг.13 изображает временные диаграммы для конкретной структуры устройства обработки сигналов, показанного на фиг.5;
Фиг.14 изображает блок-схему последовательности операций способа для конкретной структуры устройства обработки сигналов, показанного на фиг.5;
Фиг.15 изображает структурную схему модуля измерения частоты, показанного на фиг.5;
Фиг.16 изображает структурную схему общего кориолисова расходомера, к которому применяется настоящее изобретение;
Фиг.17 изображает структурную схему преобразователя на основе кориолисова расходомера, показанного на фиг.16;
Фиг.18 изображает блок-схему, иллюстрирующую способ измерения фазы с использованием преобразования Фурье для преобразователя на основе кориолисова расходомера, показанного на фиг.17;
Фиг.19 изображает блок-схему, иллюстрирующую способ измерения фазы с использованием режекторных фильтров для преобразователя на основе кориолисова расходомера, показанного на фиг.17;
Фиг.20 изображает блок-схему, иллюстрирующую способ измерения фазы с использованием полосовых фильтров для преобразователя на основе кориолисова расходомера, показанного на фиг.17.
Описание предпочтительных вариантов осуществления изобретения
Задача настоящего изобретения заключается в том, чтобы обеспечить возможность выполнения измерений с постоянной точностью, реализовывать измерение фазы с высокой производительностью фильтрации и обеспечить возможность существенного сокращения объема вычислительной обработки. Задача может быть выполнена, даже когда температура измеряемой текучей среды изменяется, даже когда воздушные пузырьки подмешиваются в измеряемую текучую среду, или даже когда измеряемая текучая среда быстро переходит из газообразной в жидкую форму.
Первый вариант осуществления
В дальнейшем в этом документе описан вариант осуществления 1 режима для осуществления настоящего изобретения со ссылкой на фиг.1 и 13.
На фиг.1 показан принцип способа и устройства обработки сигналов согласно настоящему изобретению. На фиг.2 показана форма частотного сигнала кориолисова расходомера, частота возбуждения которого составляет 100 Гц, и форма частотного сигнала кориолисова расходомера, частота возбуждения которого составляет 1000 Гц. На фиг.3 показана форма частотного сигнала в случае, если частота возбуждения кориолисова расходомера, частота возбуждения которого составляет 100 Гц, разделяется. На фиг.4 показана форма частотного сигнала в случае, если частота возбуждения кориолисова расходомера, частота возбуждения которого составляет 100 Гц, сдвигается. На фиг.5 показана структурная схема, иллюстрирующая устройство обработки сигналов, проиллюстрированное на фиг.1. На фиг.6 показана схема, иллюстрирующая сигнал детектирования скорости вибрации, который формируется на левой стороне измерительных трубок и выводится из фильтра нижних частот, проиллюстрированного на фиг.5. На фиг.7 показан сигнал, полученный как цифровой сигнал, посредством дискретизации, с произвольными постоянными интервалами, сигнала, проиллюстрированного на фиг.6, который выводится из аналого-цифрового преобразователя, проиллюстрированного на фиг.5. На фиг.8 показан частотный сигнал (θXn) передачи, выводимый из передающего устройства, проиллюстрированного на фиг.5. На фиг.9 показан сигнал со сдвигом на 90 градусов выходного сигнала (cosθ), который выводится из аналого-цифрового преобразователя и формируется во внутренней части квадратурного модулятора, проиллюстрированного на фиг.5. На фиг.10 показан сигнал со сдвигом на 90 градусов выходного сигнала (cosθXn), который выводится из передающего устройства и формируется во внутренней части квадратурного модулятора, проиллюстрированного на фиг.5. На фиг.11 показан сигнал, полученный посредством квадратурного преобразования частоты посредством квадратурного модулятора, проиллюстрированного на фиг.5. На фиг.12 показаны временные диаграммы для конкретной структуры устройства обработки сигналов, проиллюстрированного на фиг.5. На Фиг.13 показаны временные диаграммы для конкретной структуры устройства обработки сигналов, проиллюстрированного на фиг.5.
На фиг.1 показана блок-схема, иллюстрирующая принцип способа и устройства обработки сигналов согласно настоящему изобретению.
На фиг.1, когда измерительные трубки 2 и 3 вибрируют посредством вибратора 6, скорости вибрации, сформированные в измерительных трубках 2 и 3, детектируются посредством датчика 70 скорости вибрации. Детектированные скорости вибрации вычисляются и обрабатываются посредством вычислительного устройства 80 сигналов скорости вибрации. Датчик 70 скорости вибрации соответствует левому датчику 7 скорости и правому датчику 8 скорости по фиг.16.
Вычислительное устройство 80 сигналов скорости вибрации включает в себя квадратурный модулятор 85, передающее устройство 90 и модуль 95 измерения фазы.
Квадратурный модулятор 85 выполняет квадратурную модуляцию для скоростей вибрации, которые формируются в измерительных трубках 2 и 3 и детектируются посредством датчика 70 скорости вибрации, когда измерительные трубки 2 и 3 вибрируют посредством вибратора 6. Сигнал из передающего устройства 90 вводится в квадратурный модулятор 85.
Затем сигналы, полученные посредством квадратурной модуляции посредством квадратурного модулятора 85, вводятся в модуль 95 измерения фазы, предусмотренный на следующей ступени квадратурного модулятора 85. Модуль 95 измерения фазы выполняет аналогово-цифровое преобразование для сигналов скорости из датчика 70 скорости вибрации, чтобы тем самым выполнять обработку цифрового преобразования, и затем получает разность фаз между ними.
Согласно способу и устройству обработки сигналов, проиллюстрированным на фиг.1, входной сигнал подвергается квадратурному преобразованию частоты 1/N, и измерение фазы выполняется после преобразования частоты, и, следовательно, полоса входных частот уменьшается до 1/N, и может быть выполнено стабильное измерение фазы.
Как описано выше, согласно настоящему изобретению, сигнал фазы и скорости, вводимый из датчика, преобразуется в частоту 1/N (N - это произвольное число) посредством преобразования частоты, и разность фаз после преобразования измеряется. Следовательно, фильтр, имеющий идентичную полосу частот, всегда используется для того, чтобы реализовывать настоящее изобретение. Даже когда частота сигнала фазы и скорости изменяется посредством изменения плотности или температуры измеряемой текучей среды, расход может измеряться практически без влияния на точность вычисления или интервал вычислений.
Например, в кориолисовом расходомере, частота возбуждения которого составляет 100 Гц, как проиллюстрировано на фиг.2, когда полоса частот фильтра задается равной диапазону 95-105 Гц, с большой вероятностью это сдвигает частоту возбуждения за пределы полосы частот фильтра посредством изменения плотности или температуры. Следовательно, требуются таблицы фильтров для полос частот вокруг полосы частот фильтра, например таблицы для диапазона 85-95 Гц и таблицы для диапазона 105-115 Гц. Когда полоса частот фильтра расширяется, число таблиц сокращается. Тем не менее, форма волны сигнала измерения соответствует зашумленному сигналу фазы и скорости, и, следовательно, точность измерений значительно ухудшается.
Когда сигнал фазы и скорости кориолисова расходомера, частота возбуждения которого составляет 1000 Гц, должен измеряться, необходимо изменять частоту дискретизации и таблицу фильтров и, следовательно, точность вычисления или изменения интервала вычислений.
В кориолисовом расходомере, частота возбуждения которого составляет 100 Гц при обработке сигналов согласно настоящему изобретению, как проиллюстрировано на фиг.3, например, когда значение N задается равным 4, в случае если частота сигнала фазы и скорости, вводимая из датчика, составляет 100 Гц, частота преобразуется в 100/4 Гц, т.е. 25 Гц. После преобразования частоты сигнал фазы и скорости фильтруется, и затем выполняется вычисление фазы.
В случае, если используемая полоса частот фильтра - это полоса частот приблизительно 20-30 Гц, даже когда частота возбуждения изменяется посредством изменения плотности или температуры, идентичная таблица фильтров всегда может использоваться за пределами полосы частот 80-120 Гц. Следовательно, измерение может всегда осуществляться при стабильной точности вычисления и интервале вычислений.
Дополнительно, в кориолисовом расходомере, частота возбуждения которого составляет 1000 Гц, когда значение N задается равным 40, расход может измеряться на основе полосы частот фильтра, полностью совпадающей с полосой частот в кориолисовом расходомере, частота возбуждения которого составляет 100 Гц.
Дополнительно, в настоящем изобретении, как проиллюстрировано на фиг.4, способ выполнения преобразования 1/N для сигнала фазы и скорости включает в себя способ сдвига частоты входной частоты без разделения. В случае кориолисова расходомера, как проиллюстрировано на фиг.4, входная частота - это частота, сдвигаемая без разделения, и, следовательно, предусмотрен такой признак, что расход может вычисляться без потери эффекта фильтрации.
Например, когда входной сигнал подвергается частотному разделению 1/N, аналогично случаю кориолисова расходомера, проиллюстрированного на фиг.3, составляющая шума также подвергается частотному разделению 1/N. Следовательно, даже когда полоса частот фильтрации сужена, эффект не может ожидаться в большой степени.
Таким образом, когда сигнал фазы и скорости подвергается преобразованию 1/N сдвигом частоты, аналогично случаю кориолисова расходомера, проиллюстрированного на фиг.4, составляющая шума одновременно сдвигается по частоте, но полоса частот фильтра может уменьшаться до 1/N, и, следовательно, очень эффективная фильтрация может достигаться по сравнению с тем, что было до сдвига частоты.
На фиг.5 показана структура устройства обработки сигналов, проиллюстрированного на фиг.1.
На фиг.5 левый измерительный датчик (LPO) 7 (соответствующий левому датчику 7 скорости) соединяется с фильтром 30 нижних частот. Таким образом, в ходе вибрации с помощью вибратора 6, когда сигнал детектирования скорости вибрации (сигнал скорости на выходной стороне), который формируется на левой стороне измерительных трубок 2 и 3, детектируется посредством левого измерительного датчика 7, сигнал детектирования скорости вибрации (сигнал скорости на выходной стороне) вводится в фильтр 30 нижних частот.
Фильтр 30 нижних частот является схемой для извлечения, с помощью частотного фильтра, только низкочастотного левого сигнала скорости (сигнала скорости на выходной стороне) из левого сигнала скорости (сигнала скорости на выходной стороне), выводимого из левого датчика 7 скорости, детектирующего скорость вибрации, сформированную на левой стороне измерительных трубок 2 и 3, в случае если измерительные трубки 2 и 3 вибрируют посредством вибратора 6.
Фильтр 30 нижних частот соединяется с аналого-цифровым преобразователем 31. Аналого-цифровой преобразователь 31 преобразует левый сигнал скорости (сигнал скорости на выходной стороне), который является аналоговым сигналом, выводимым из фильтра 30 нижних частот, в цифровой сигнал. Левый сигнал скорости (сигнал скорости на выходной стороне), полученный преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал, вводится в устройство 100 обработки сигналов.
С другой стороны, правый измерительный датчик (RPO) 8 (соответствующий правому датчику 8 скорости) соединяется с фильтром 34 нижних частот. Таким образом, в ходе вибрации с помощью вибратора 6, когда сигнал детектирования скорости вибрации (сигнал скорости на входной стороне), который формируется на правой стороне измерительных трубок 2 и 3, определяется посредством правого измерительного датчика 8, сигнал детектирования скорости вибрации (сигнал скорости на входной стороне) вводится в фильтр 34 нижних частот.
Фильтр 34 нижних частот является схемой для извлечения, с помощью частотного фильтра, только низкочастотного правого сигнала скорости (сигнала скорости на входной стороне) из правого сигнала скорости (сигнала скорости на входной стороне), выводимого из правого датчика 8 скорости, детектирующего скорость вибрации, сформированную на правой стороне измерительных трубок 2 и 3, в случае если измерительные трубки 2 и 3 вибрируют посредством вибратора 6.
Фильтр 34 нижних частот соединяется с аналого-цифровым преобразователем 35. Аналого-цифровой преобразователь 35 преобразует правый сигнал скорости (сигнал скорости на входной стороне), который является аналоговым сигналом, выводимым из фильтра 34 нижних частот, в цифровой сигнал.
Дополнительно, устройство 100 обработки сигналов соединяется с аналого-цифровым преобразователем 35. Устройство 100 обработки сигналов выполняет квадратурное преобразование частоты 1/N для каждого из правого сигнала скорости (сигнала скорости на входной стороне) и левого сигнала скорости (сигнала скорости на выходной стороне) и выполняет измерение фазы после преобразования частоты так, чтобы уменьшать полосу входных частот до 1/N и реализовывать стабильное измерение фазы.
В устройстве 100 обработки сигналов, сигнал из аналого-цифрового преобразователя 31 соединяется с квадратурным модулятором 110. Квадратурный модулятор 110 выполняет квадратурное преобразование частоты 1/N для левого сигнала скорости (сигнала скорости на выходной стороне).
Дополнительно, сигнал из аналого-цифрового преобразователя 31 подается на модуль 120 измерения частоты. Модуль 120 измерения частоты измеряет частоту левого сигнала скорости (сигнала скорости на выходной стороне), полученную преобразованием, посредством аналого-цифрового преобразователя 31 в цифровой сигнал, левого сигнала скорости (сигнала скорости на выходной стороне), выводимого из левого датчика 7 скорости, детектирующего скорость вибрации, сформированную на левой стороне измерительных трубок 2 и 3, в случае если измерительные трубки 2 и 3 вибрируют посредством вибратора 6.
Дополнительно, сигнал из аналого-цифрового преобразователя 35 подается на квадратурный модулятор 130. Квадратурный модулятор 130 выполняет квадратурное преобразование частоты 1/N для правого сигнала скорости (сигнала скорости на входной стороне).
Значение измерения частоты, измеренное посредством модуля 120 измерения частоты, выводится в передающее устройство 140. Передающее устройство 140 передает заранее детектированный частотный сигнал на основе значения измерения частоты, выводимого из модуля 120 измерения частоты.
Выходной сигнал из передающего устройства 140 вводится в квадратурный модулятор 110 и квадратурный модулятор 130.
Несущая частота получается с помощью модуля 120 измерения частоты, передающего устройства 140 и квадратурного модулятора 110. Входная частота левого сигнала скорости (сигнала скорости на выходной стороне), вводимая из аналого-цифрового преобразователя 31, и выходная частота, выводимая из передающего устройства 140, модулируются посредством квадратурных модуляторов 110. Результат, полученный посредством модуляции, т.е. одного из суммы или разности между частотами обоих входных сигналов на основе теоремы сложения, используется для сдвига частоты. Выходная частота передающего устройства 140 управляется таким образом, что частота модуляции становится равной 1/N от входной частоты входного левого сигнала скорости (сигнала скорости на выходной стороне).
Когда передающее устройство 140 управляется так, как описано выше, аналогично случаю квадратурного модулятора 110, также в квадратурном модуляторе 130, частота, полученная после выполнения преобразования частоты, управляется так, чтобы становиться 1/N от входной частоты правого сигнала скорости (сигнала скорости на входной стороне), вводимой из аналого-цифрового преобразователя 35, на основе выходной частоты, выводимой из передающего устройства 140.
Модуль 150 измерения разности фаз соединяется с квадратурным модулятором 110 и квадратурным модулятором 130. Модуль 150 измерения разности фаз выполняет измерение фазы на основе сигнала выходной частоты, соответствующего 1/N от входной частоты левого сигнала скорости (сигнала скорости на выходной стороне), которая вводится из аналого-цифрового преобразователя 31 и выводится из квадратурного модулятора 110, и сигнала выходной частоты, соответствующего 1/N от входной частоты правого сигнала скорости (сигнала скорости на входной стороне), которая вводится из аналого-цифрового преобразователя 35 и выводится из квадратурного модулятора 130.
Когда используется такая структура, согласно этому варианту осуществления, входные частоты (левый сигнал скорости и правый сигнал скорости) преобразуются в полосы низких частот (1/N от частот). Следовательно, полосы входных частот (левый сигнал скорости и правый сигнал скорости) становятся равными 1/N, и число таблиц фильтров значительно сокращается. Помимо этого, обработка измерения фазы может выполняться более эффективно.
Синхросигнал вводится из задающего генератора 160 в аналого-цифровой преобразователь 31 и аналого-цифровой преобразователь 35. Задающий генератор 160 синхронизирует выводы аналого-цифрового преобразователя 31 и аналого-цифрового преобразователя 35 и синхронизирует цифровой сигнал левого сигнала скорости, выводимого из аналого-цифрового преобразователя 31, и цифровой сигнал правого сигнала скорости, выводимого из аналого-цифрового преобразователя 35.
Квадратурный модулятор 110, модуль 120 измерения частоты, квадратурный модулятор 130, передающее устройство 140, модуль 150 измерения разности фаз и задающий генератор 150 включены в устройство 100 обработки сигналов.
Далее описан конкретный способ вычисления для вычисления измерения разности фаз в устройстве 100 обработки сигналов, проиллюстрированном на фиг.5.
Когда измерительные трубки 2 и 3 вибрируют посредством вибратора 6 кориолисова расходомера 1, выходные сигналы (левый сигнал скорости и правый сигнал скорости) из датчика 70 скорости вибрации (левого измерительного датчика 7 и правого измерительного датчика 8), предусмотренного в измерительных трубках 2 и 3, получаются как входные сигналы LPO и RPO, как проиллюстрировано на фиг.2.
В этом случае, входные сигналы LPO и RPO заданы следующим образом (δφ - это разность фаз между LPO и RPO).
(выражение 1)
(выражение 2)
Выходные сигналы (левый сигнал LPO скорости и правый сигнал RPO скорости) из этих двух датчиков (левого измерительного датчика 7 и правого измерительного датчика 8) преобразуются из аналоговых сигналов в цифровые сигналы посредством аналого-цифровых преобразователей 31 и 35 с помощью фильтров 30 и 34 нижних частот, предусмотренных в преобразователе кориолисова расходомера 1, соответственно, и затем передаются в устройство 100 обработки сигналов.
Как описано выше, устройство 100 обработки сигналов разделяется на четыре блока, в том числе квадратурные модуляторы 110 и 130, модуль 120 измерения частоты, передающее устройство 140 и модуль 150 измерения разности фаз. Вычисляется разность фаз между выходным сигналом LPO из левого измерительного датчика 7 и выходным сигналом RPO из правого измерительного датчика 8, и затем преобразуется в сигнал расхода на основе частотного сигнала, выводимого из модуля 120 измерения частоты, и температурных данных, определяемых посредством температурного датчика 9.
Сигнал детектирования скорости вибрации (сигнал скорости на выходной стороне), сформированный на левой стороне измерительных трубок 2 и 3, который детектируется посредством левого измерительного датчика 7, вводится в фильтр 30 нижних частот, проиллюстрированный на фиг.5. Фильтр 30 нижних частот выводит синусоидальный сигнал (sinθ), как проиллюстрировано на фиг.6, из которого исключается гармонический шум, чтобы исключать влияние наложения частот при аналогово-цифровом преобразовании.
Синусоидальный сигнал (sinθ), выводимый из фильтра 30 нижних частот, как проиллюстрировано на фиг.6, дискретизируется для преобразования цифровых сигналов с произвольным постоянным интервалом посредством аналого-цифрового преобразователя 31, чтобы получать сигнал (sinθ) дискретизации, как проиллюстрировано на фиг.7, и затем выводится из аналого-цифрового преобразователя 31.
Сигнал (sinθ), как проиллюстрировано на фиг.7, который выводится из фильтра 30 нижних частот и дискретизируется для преобразования цифровых сигналов посредством аналого-цифрового преобразователя 31, вводится в квадратурный модулятор 110 и модуль 120 измерения частоты устройства 100 обработки сигналов, проиллюстрированного на фиг.5. Дополнительно, выходной сигнал передающего устройства, выводимый из передающего устройства 140, также вводится в квадратурный модулятор 110.
Когда значение измерения частоты выходного сигнала, выводимого из модуля 120 измерения частоты, вводится в передающее устройство 140, частотный сигнал (θXn) передачи передающего устройства 140 передается на требуемой частоте на основе значения измерения частоты выходного сигнала, и косинусоидальный сигнал (cosθXn), как проиллюстрировано на фиг.8, выводится на выходной скорости передачи, идентичной интервалу дискретизации входного сигнала в аналого-цифровом преобразователе 31.
Когда сигнал (sinθ), как проиллюстрировано на фиг.7, который получается дискретизацией посредством аналого-цифрового преобразователя 31 как цифровой сигнал, вводится в квадратурный модулятор 110, входной сигнал (sinθ) из аналого-цифрового преобразователя 31 подвергается сдвигу на 90 градусов во внутренней части квадратурного модулятора 110, чтобы формировать сигнал (cosθ), как проиллюстрировано на фиг.9. Когда сигнал (cosθXn), как проиллюстрировано на фиг.8, который выводится из передающего устройства 140, вводится в квадратурный модулятор 110, входной сигнал (cosθXn) из передающего устройства 140 подвергается сдвигу на 90 градусов во внутренней части квадратурного модулятора 110, чтобы формировать сигнал (sinθXn), как проиллюстрировано на фиг.10.
В квадратурном модуляторе 110 квадратурное преобразование частоты выполняется для сдвига модуляции на основе сигнала 0 градусов и сигнала 90 градусов входного сигнала (sinθ) из аналого-цифрового преобразователя 31 и сигнала 0 градусов и сигнала 90 градусов входного сигнала (cosθXn) из передающего устройства 140, чтобы формировать сигнал 1/N (sinθcosθXn-cosθsinθXn) входного сигнала (sinθ) из аналого-цифрового преобразователя 31, как проиллюстрировано на фиг.11. Сформированный сигнал выводится из квадратурного модулятора 110 устройства 100 обработки сигналов, проиллюстрированного на фиг.5.
Разность фаз между выходными сигналами (левым сигналом скорости и правым сигналом скорости) из датчика 70 скорости вибрации (левого измерительного датчика 7 и правого измерительного датчика 8), предусмотренного в измерительных трубках 2 и 3, в случае если измерительные трубки 2 и 5 вибрируют посредством вибратора 6 кориолисова расходомера 1, вычисляется посредством четырех блоков, включающих в себя квадратурные модуляторы 110 и 130, передающее устройство 140, модуль 150 измерения разности фаз и модуль 120 измерения частоты, включенных в устройство 100 обработки сигналов, проиллюстрированное на фиг.3. Затем, вычисленная разность фаз преобразуется в сигнал расхода на основе частотного сигнала, выводимого из модуля 120 измерения частоты, и температурных данных, детектируемых посредством температурного датчика 9.
Далее описана работа устройства 100 обработки сигналов, проиллюстрированного на фиг.5, в отношении временных диаграмм, проиллюстрированных на фиг.12 и фиг.13.
Во-первых, в фильтре 30 нижних частот, проиллюстрированном на фиг.5, когда гармонический шум исключается, чтобы исключить влияние наложения спектров при аналогово-цифровом преобразовании, синусоидальный сигнал (sinθ), как проиллюстрировано на фиг.6, выводится.
Когда синусоидальный сигнал (sinθ), проиллюстрированный на фиг.6, выводится, синусоидальный сигнал (sinθ), проиллюстрированный на фиг.6, вводится в аналого-цифровой преобразователь 31. Затем сигнал дискретизируется для преобразования цифровых сигналов с произвольным постоянным интервалом посредством аналого-цифрового преобразователя 31, для получения сигнала дискретизации (Y1=sinθ), как проиллюстрировано на фиг.12(A), и выводится из аналого-цифрового преобразователя 31.
Сигнал дискретизации (sinθ), проиллюстрированный на фиг.12(A), который выводится из аналого-цифрового преобразователя 31, вводится в квадратурный модулятор 110 и модуль 120 измерения частоты устройства 100 обработки сигналов, проиллюстрированный на фиг.5.
Модуль 120 измерения частоты устройства обработки сигналов 10 измеряет частоту левого сигнала скорости (сигнала скорости на выходной стороне), который получается преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал.
Когда левый сигнал скорости (сигнал скорости на выходной стороне), который получается преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал, вводится в квадратурный модулятор 110 устройства 100 обработки сигналов, проиллюстрированный на фиг.5, входной сигнал (sinθ) из аналого-цифрового преобразователя 31 подвергается сдвигу на 90 градусов во внутренней части, чтобы формировать сигнал (cosθ), как проиллюстрировано на фиг.12(B).
Частотный сигнал, измеренный на основе цифрового сигнала, выводимого из аналого-цифрового преобразователя 31, выводится из модуля 120 измерения частоты устройства 100 обработки сигналов.
Значение измерения частоты выходного сигнала, выводимой из модуля 120 измерения частоты, вводится в передающее устройство 120. Передающее устройство 120, в которое вводится частота выходного сигнала, формирует частотный сигнал (θXn) передачи, удовлетворяющий следующему выражению:
θXn=θ*(1-1/N),
на основе частоты выходного сигнала и выводит косинусоидальный сигнал (Y3=cosθXn), как проиллюстрировано на фиг.12(C), на выходной скорости передачи, идентичной интервалу дискретизации входного сигнала в аналого-цифровом преобразователе 31.
Косинусоидальный сигнал (Y3=cosθXn), как проиллюстрировано на фиг.12(C), который выводится из передающего устройства 120, вводится в квадратурный модулятор 110. Когда косинусоидальный сигнал (Y3=cosθXn), как проиллюстрировано на фиг.12(C), вводится в квадратурный модулятор 110, косинусоидальный сигнал (Y3=cosθXn), как проиллюстрировано на, фиг.12(C), который вводится из передающего устройства 140, подвергается сдвигу на 90 градусов, чтобы формировать синусоидальный сигнал (Y4=sinθXn), как проиллюстрировано на фиг.12(D).
В квадратурном модуляторе 110 квадратурное преобразование частоты выполняется для сдвига модуляции на основе сигнала 0 градусов и сигнала 90 градусов входного сигнала (sinθ) из аналого-цифрового преобразователя 31 и сигнала 0 градусов и сигнала 90 градусов входного сигнала (cosθXn) из передающего устройства 140, чтобы формировать, в качестве сигнала 1/N (sinθcosθXn-cosθsinθXn) входного сигнала (sinθ) из аналого-цифрового преобразователя 31, синусоидальный сигнал (Y5=sinθcosθXn-cosθsinθXn=sin(θ/N)), как проиллюстрировано на фиг.13(E). Синусоидальный сигнал (Y5=sinθcosθXn-cosθsinθXn=sin(θ/N)), как проиллюстрировано на фиг.13(E), который формируется посредством квадратурного модулятора 110, выводится из квадратурного модулятора 110 устройства 100 обработки сигналов, проиллюстрированного на фиг.5, и вводится в модуль 150 измерения разности фаз.
Дополнительно, в фильтре 34 нижних частот, проиллюстрированном на фиг.5, когда исключается гармонический шум, чтобы исключать влияние наложения спектров при аналогово-цифровом преобразовании, выводится синусоидальный сигнал (sin(θ+δφ)).
Когда синусоидальный сигнал (sin(θ+δφ)) выводится из фильтра 34 нижних частот, синусоидальный сигнал (sin(θ+δφ)) вводится в аналого-цифровой преобразователь 35. Затем сигнал дискретизируется для преобразования цифровых сигналов с произвольным постоянным интервалом посредством аналого-цифрового преобразователя 35.
Сигнал дискретизации (sin(θ+δφ)), выводимый из аналого-цифрового преобразователя 35, подвергается сдвигу на 90 градусов во внутренней части квадратурного модулятора 130, чтобы формировать косинусоидальный сигнал (cos(θ+δφ)).
Косинусоидальный сигнал (Y3=cosθXn), как проиллюстрировано на фиг.12(C), который выводится из передающего устройства 120, вводится в квадратурный модулятор 130. Когда косинусоидальный сигнал (Y3=cosθXn), как проиллюстрировано на фиг.12(C), вводится в квадратурный модулятор 130, косинусоидальный сигнал (Y3=cosθXn), как проиллюстрировано на фиг.12(C), который вводится из передающего устройства 140, подвергается сдвигу на 90 градусов, чтобы формировать синусоидальный сигнал (Y4=sinθXn), как проиллюстрировано на фиг.12(D).
В квадратурном модуляторе 130 квадратурное преобразование частоты выполняется для сдвига модуляции на основе сигнала 0 градусов и сигнала 90 градусов входного сигнала (sin(θ+δφ)) из аналого-цифрового преобразователя 35 и сигнала 0 градусов и сигнала 90 градусов входного сигнала (cosθXn) из передающего устройства 140, чтобы формировать, в качестве сигнала 1/N от входного сигнала (sinθ) из аналого-цифрового преобразователя 35, синусоидальный сигнал (Y6=(sin(θ+δφ-θxn)=sin(θ/N+δφ)), как проиллюстрировано на фиг.13(F). Синусоидальный сигнал (Y6=(sin(θ+δφ-θxn)=sin(θ/N+δφ)), как проиллюстрировано на фиг.13(F), который формируется посредством квадратурного модулятора 130, выводится из квадратурного модулятора 130 устройства 100 обработки сигналов, проиллюстрированного на фиг.5, и вводится в модуль 150 измерения разности фаз.
Как описано выше, как синусоидальный сигнал (Y5=sin(θ/N)), как проиллюстрировано на фиг.13(E), который выводится из квадратурного модулятора 110, так и синусоидальный сигнал (Y6=sin(θ/N+δφ)), как проиллюстрировано на фиг.13(F), который выводится из квадратурного модулятора 130, вводятся в модуль 150 измерения разности фаз.
В модуле 150 измерения разности фаз сигнал (Y7=δφ), проиллюстрированный на фиг.13(G), выводится как разность фаз δφ на основе синусоидального сигнала (Y5=sin(θ/N)), проиллюстрированного на фиг.13(E), который выводится из квадратурного модулятора 110 и вводится в модуль 150 измерения разности фаз, и синусоидального сигнала (Y6=sin(θ/N+δφ)), проиллюстрированного на фиг.13(F), который выводится из квадратурного модулятора 130 и вводится в модуль 150 измерения разности фаз.
Когда интервал вычислений синхронизирован со временем дискретизации, как описано выше, производительность в реальном времени для измерения фазы может быть повышена.
Дополнительно, каждый из набора сигналов скорости вибрации (sinθ и sin(θ+δφ)) подвергается идентичной обработке для вычисления фазы, и, следовательно, практически отсутствует ошибка в вычислениях. Следовательно, может быть достигнуто точное вычисление фазы.
Второй вариант осуществления
В дальнейшем в этом документе описан вариант осуществления 2 режима для осуществления настоящего изобретения со ссылкой на фиг.14 и 15.
На фиг.14 показана блок-схема последовательности операций способа для конкретной структуры устройства обработки сигналов, проиллюстрированного на фиг.5, а на фиг.15 показана структурная схема, иллюстрирующая модуль измерения частоты устройства обработки сигналов, проиллюстрированного на фиг.5.
На фиг.14 показана блок-схема последовательности операций способа, иллюстрирующей квадратурную частотную модуляцию и измерение фазы при вычислении измерения разности фаз вычислительного устройства 80 сигналов скорости вибрации, проиллюстрированного на фиг.1, которое используется для устройства 100 обработки сигналов, проиллюстрированного на фиг.5.
На фиг.14, на этапе 200, инициализируются параметры вычислительного устройства 80 сигналов скорости вибрации, проиллюстрированного на фиг.1. Когда параметры вычислительного устройства 80 сигналов скорости вибрации инициализированы на этапе 200, на этапе 210 сигналы фазы и скорости из двух датчиков (левого измерительного датчика 7 и правого измерительного датчика 8) дискретизируются с произвольными интервалами дискретизации посредством аналого-цифрового преобразователя 31 и аналого-цифрового преобразователя 35, чтобы формировать синусоидальную форму сигнала и косинусоидальную форму сигнала, соответственно, на основе дискретизированных данных.
Когда синусоидальная форма сигнала и косинусоидальная форма сигнала сформированы на этапе 210, на этапе 220 частота дискретизированных данных измеряется посредством модуля 120 измерения частоты, и значение N определяется на основе измеренной частоты.
Когда значение N детектировано на этапе 220, на этапе 230 измеренная частота делится на заданное целевое значение частотного разделения "N", чтобы определять частоту после квадратурного преобразования частоты.
Когда частота после квадратурного преобразования частоты детектирована на этапе 230, на этапе 240 синусоидальная форма опорного сигнала и косинусоидальная форма опорного сигнала формируются посредством передающего устройства 140 опорных сигналов, и квадратурное преобразование частоты выполняется посредством квадратурных модуляторов 110 и 130 на основе форм опорного сигнала. Как результат, каждый частотно-модулированный сигнал имеет значение, равное 1/N от входной частоты.
Когда квадратурное преобразование частоты выполняется на этапе 240, на этапе 250 квадратурные модуляторы 110 и 130 отправляют, в модуль 150 измерения разности фаз, синусоидальный сигнал и косинусоидальный сигнал, которые формируются как синусоидальная форма сигнала и косинусоидальная форма сигнала, каждый из которых имеет частоту, равную 1/N от входной частоты, посредством квадратурного преобразования частоты, на основе форм опорного сигнала, сигналов, полученных посредством дискретизации сигналов фазы и скорости с произвольными интервалами дискретизации посредством аналого-цифрового преобразователя 31 и аналого-цифрового преобразователя 35.
Когда синусоидальный сигнал и косинусоидальный сигнал отправлены в модуль 150 измерения разности фаз на этапе 250, на этапе 260 модуль 150 измерения разности фаз вычисляет разность фаз на основе синусоидального сигнала и косинусоидального сигнала, которые являются сигналами фазы и скорости, имеющими частоту 1/N, которые получаются посредством частотной модуляции и выводятся из квадратурных частотных модуляторов 110 и 130. Сигналы фазы и скорости, полученные посредством преобразования частоты, используются для измерения фазы.
(1) Модуль измерения частоты
В этом варианте осуществления способ с использованием принципа контура фазовой синхронизации (PLL) используется для способа измерения частоты. PLL - это электронная схема, в которой сигнал, который равен по частоте входному сигналу переменного тока и синхронизирован по фазе с ним, выводится из другого осциллятора посредством управления с обратной связью.
Следовательно, PLL, главным образом, является схемой фазовой синхронизации и может формировать сигнал, синхронизированный по фазе с входным сигналом.
PLL - это колебательная схема для управления с обратной связью осциллятором в колебательном контуре так, что разность фаз между опорным сигналом, вводимым извне, и выходным сигналом из осциллятора в контуре является постоянной. Следовательно, PLL может относительно легко формироваться с использованием вычислительного устройства и может выполнять высокоскоростные вычисления.
Модуль 120 измерения частоты имеет структуру, как проиллюстрировано на фиг.15.
Таким образом, аналого-цифровой преобразователь 31 соединяется с умножителем 121. Выводным сигналом из аналого-цифрового преобразователя 31 является левый сигнал скорости (сигнал скорости на выходной стороне) sinθ, полученный в случае, если сигнал детектирования скорости вибрации (сигнал скорости на выходной стороне), имеющий разность фаз и/или частоту вибрации, пропорциональную кориолисовой силе, которая формируется на левой стороне пары измерительных трубок 2 и 3, когда измерительные трубки 2 и 3 попеременно возбуждаются посредством вибратора 6, детектируется посредством левого измерительного датчика 7, вводится в фильтр 30 нижних частот, чтобы извлекать только низкочастотный левый сигнал скорости (сигнал скорости на выходной стороне), и преобразуется в цифровой сигнал.
Умножитель 121 сравнивает фазу левого сигнала sinθ скорости (сигнала скорости на выходной стороне), который получается преобразованием посредством аналого-цифрового преобразователя 31 как цифровой сигнал, с фазой выходного сигнала cosδ, выводимого из передающего устройства 123 для измерения частоты, и выводит сигналы в фильтр 122 нижних частот.
Следовательно, выходная сторона умножителя 121 соединяется с фильтром 122 нижних частот. Фильтр 122 нижних частот извлекает только низкочастотный сигнал из выходного сигнала, выводимого из умножителя 121, через частотный фильтр.
Таким образом, в умножителе 121, посредством произведения левого сигнала скорости sinθ на выходной сигнал cosδ передающего устройства для измерения частоты, формируются суммирующий сигнал и разностный сигнал θ и δ. Тем не менее, в этом случае, только разностная составляющая извлекается из выходного сигнала, выводимого из умножителя 121.
Фильтр 122 нижних частот соединяется с передающим устройством 123 для измерения частоты. Передающее устройство 123 для измерения частоты формирует данные δ по фазе на основе низкочастотного сигнала, выводимого из фильтра 122 нижних частот.
Передающее устройство 123 для измерения частоты выводит выходной сигнал cosδ в умножитель 121. В умножителе 121 фаза входных данных (sinθ), полученная преобразованием посредством аналого-цифрового преобразователя 31 как цифровое значение, сравнивается с фазой выходного сигнала cosδ, и разностный сигнал и суммирующий сигнал выводятся из фильтра 122 нижних частот. Контур обратной связи формируется таким образом, что выходные данные "V" (функция V вычисления частоты) только разностной составляющей, полученные посредством фильтрации посредством фильтра 122 нижних частот, становятся равными 0.
Когда вышеописанная структура описывается математически, как в модуле 120 измерения частоты, проиллюстрированном на фиг.15, входной сигнал выражается посредством sinθ, а выходной сигнал передающего устройства 123 для измерения частоты выражается посредством cosδ. Когда эти две формы сигналов умножены посредством умножителя 121, получается следующее.
(выражение 3)

Форма входного сигнала: sinθ
Форма выходного сигнала передающего устройства для измерения частоты: cosδ
Когда умноженное значение (sinθ×cosδ) отфильтровано посредством фильтра 122 нижних частот, высокочастотная составляющая исключается посредством фильтра 122 нижних частот. Следовательно, функция V вычисления частоты, выводимая из фильтра 122 нижних частот, выражается следующим образом.
(выражение 4)
Когда значение (θ-δ) в выражении (4) является достаточно небольшим значением (V≈0), функция V вычисления частоты может приблизительно выражаться следующим образом.
(выражение 5)
Когда форма выходного сигнала передающего устройства 123 для измерения частоты управляется так, что функция V вычисления частоты становится равной 0, может быть получена фаза θ выражения (5).
Когда Ta указывает интервал дискретизации измерения, фаза θ перед преобразованием частоты, получаемая посредством способа, как описано выше, вычисляется с использованием следующего выражения (6), выражения (7) и выражения (8), и, как результат, может быть получена частота "f".
(выражение 6)

ΔT указывает изменение во времени и равно интервалу вычислений (частоте дискретизации).
Следовательно, фаза (θ) выражается следующим образом.
(выражение 7)
где Ta - это изменение во времени (интервал дискретизации) (секунд)
f - это входная частота (Гц)
θ - это изменение в фазе (рад)
(выражение 8)

T - это интервал дискретизации
f - это входная частота
θ - это входная фаза
Когда такое вычисление выполняется посредством модуля 120 измерения частоты, может быть достигнуто высокоскоростное измерение частоты.
(2) Квадратурный частотный модулятор
На фиг.5 квадратурные частотные модуляторы 110 и 130 имеют одинаковую структуру, и каждый получает разность частот между двумя входными сигналами, чтобы выводить частотный сигнал. Одновременно, каждый из квадратурных частотных модуляторов формирует и выводит сигнал, ортогональный частотному сигналу.
Таким образом, сигнал детектирования скорости вибрации (сигнал скорости на выходной стороне), сформированный на левой стороне измерительных трубок 2 и 3, вибрирующих посредством вибратора 6, детектируется посредством левого измерительного датчика 7. Сигнал детектирования скорости вибрации (сигнал скорости на выходной стороне), детектируемый посредством левого измерительного датчика 7, вводится в фильтр 30 нижних частот.
Аналоговый сигнал только низкочастотного левого сигнала скорости (сигнала скорости на выходной стороне) выделяется посредством фильтра 30 нижних частот из левого сигнала скорости (сигнала скорости на выходной стороне), выводимого из левого датчика 7 скорости, преобразуется в цифровой сигнал посредством аналого-цифрового преобразователя 31 и вводится в квадратурный частотный модулятор 110.
В квадратурном частотном модуляторе 110 разность частот получается между левым сигналом скорости (сигналом скорости на выходной стороне), который детектируется посредством левого датчика 7 скорости, выводимым из аналого-цифрового преобразователя 31 и вводимым в квадратурный частотный модулятор 110, и заранее детектированным частотным сигналом, передаваемым и выводимым из передающего устройства 140 на основе значения измерения частоты, выводимого из модуля 120 измерения частоты. Одновременно формируется и выводится сигнал, ортогональный частотному сигналу.
Дополнительно, сигнал детектирования скорости вибрации (сигнал скорости на входной стороне), сформированный на правой стороне измерительных трубок 2 и 3, когда измерительные трубки 2 и 3 вибрируют посредством вибратора 6, детектируется посредством правого измерительного датчика 8. Сигнал детектирования скорости вибрации (сигнал скорости на выходной стороне), детектируемый посредством правого измерительного датчика 8, вводится в фильтр 34 нижних частот.
Аналоговый сигнал только низкочастотного правого сигнала скорости (сигнала скорости на входной стороне) выделяется посредством фильтра 34 нижних частот из правого сигнала скорости (сигнала скорости на входной стороне), выводимого из правого датчика 7 скорости, преобразуется в цифровой сигнал посредством аналого-цифрового преобразователя 35 и вводится в квадратурный частотный модулятор 130.
В квадратурном частотном модуляторе 130 разность частот получается между правым сигналом скорости (сигналом скорости на входной стороне), который детектируется посредством правого датчика 8 скорости, выводимым из аналого-цифрового преобразователя 35 и вводимым в квадратурный частотный модулятор 130, и заранее детектированным частотным сигналом, передаваемым и выводимым из передающего устройства 140 на основе значения измерения частоты, выводимого из модуля 120 измерения частоты. Одновременно формируется и выводится сигнал, ортогональный частотному сигналу.
Допустим, что выходной сигнал (левый сигнал LPO скорости или правый сигнал RPO скорости) из датчика скорости вибрации (левого измерительного датчика 7 или правого измерительного датчика 8), детектирующего сигнал детектирования скорости вибрации, и сигнал, который выводится из передающего устройства 140 и вводится в квадратурный частотный модулятор (более конкретно, в квадратурный частотный модулятор 110 или 130), выражаются следующим образом.
(выражение 9)
Выходной сигнал передающего устройства: cos(θX)
Следовательно, в квадратурном частотном модуляторе 110 или 130 сигналы сдвига на 90° относительно выходного сигнала (левого сигнала LPO скорости или правого сигнала RPO скорости) из датчика скорости вибрации (левого измерительного датчика 7 или правого измерительного датчика 8) и сигнал, вводимый из передающего устройства 140 в квадратурный частотный модулятор (более конкретно, в квадратурный частотный модулятор 110 или 130), получаются из выражения 10 и выражения 11.
(выражение 10)
Сигнал сдвига на 90° сигнала датчика: cos(θ)
(выражение 11)
Сигнал сдвига на 90° из передающего устройства: cos(θX)
Дополнительно, разности частот, т.е. составляющие (θ-θX), вычисляются на основе сигналов, полученных посредством преобразования частоты для соответствующих сигналов выражения (10) и выражения (11) и сигналов сдвига на 90° после преобразования частоты.
(выражение 12)
(выражение 13)
Следовательно, в частотных модуляторах 110 и 130 IQ-сигналы разностей частот между частотами входных сигналов из аналого-цифровых преобразователей 31 и 35 и частотой выходного сигнала из передающего устройства 140 формируются и отправляются как соответствующие выходные сигналы квадратурной модуляции.
(3) Передающее устройство
Передающее устройство 140 управляет частотой передающего устройства 140 на основе результата θ, полученного посредством измерения посредством модуля 120 измерения частоты.
Таким образом, в передающем устройстве 140 выходной сигнал передающего устройства 140 cosθxn определяется таким образом, что выходная частота квадратурного модулятора 110 становится равной 1/N от частоты θ сигнала детектирования скорости вибрации (сигнала скорости на выходной стороне), который формируется на левой стороне измерительных трубок 2 и 3 и детектируется посредством левого измерительного датчика 7, и вводится в частотный модулятор 110 в случае, если измерительные трубки 2 и 3 вибрируют посредством вибратора 6.
Частотный модулятор 110 и частотный модулятор 130 имеют одинаковую структуру. Следовательно, аналогично случаю частоты, выводимой из частотного модулятора 110, относительно частоты, выводимой из частотного модулятора 130, выходная частота квадратурного модулятора 130 становится равной 1/N от частоты θ сигнала детектирования скорости вибрации (сигнала скорости на входной стороне), который формируется на правой стороне измерительных трубок 2 и 3 и детектируется посредством правого измерительного датчика 8 и вводится в частотный модулятор 130 в случае, если измерительные трубки 2 и 3 вибрируют посредством вибратора 6.
Частотный модулятор 110 и частотный модулятор 130 предусмотрены для того, чтобы получать разность между двумя частотами, вводимыми в каждый из частотных модуляторов, на основе выражения (12) или (13), и иметь условие, при котором выходная частота становится равной 1/N от частоты левого сигнала скорости или частоты правого сигнала скорости, и, следовательно, удовлетворяется следующее выражение (выражение 14).
(выражение 14)
θ - входной сигнал
θX - выходной сигнал передающего устройства
N - целое число
Как описано выше, выходной сигнал передающего устройства 140 cosθX предпочтительно определяется так, чтобы управлять θX.
Выходной сигнал каждого из квадратурных частотных модуляторов 110 и 130 становится равным 1/N от входного сигнала. Результаты, выводимые из квадратурных частотных модуляторов 110 и 130, соответствующих левому измерительному датчику 7 и правому измерительному датчику 8, соответственно, выражаются следующим образом.
(выражение 15)
(выражение 16)

Частота возбуждения левого датчика 7 скорости и частота возбуждения правого датчика 8 скорости в кориолисовом расходомере 1 составляют максимум 1 кГц. Следовательно, если значение N задается равным 32, частоты, полученные посредством модуляции посредством частотных квадратурных модуляторов 110 и 130 и выводимые из них, составляют приблизительно 30 Гц, и, следовательно, желательно подготовить фильтр, имеющий очень низкую частоту и узкую полосу частот.
В выражении (15) и выражении (16), как описано выше, значение N зависит от типа расходомера. В дальнейшем в этом документе пример использования N описывается ниже.
Когда частота возбуждения датчиков задается в диапазоне 50-1600 Гц, и полоса частот фильтра преобразователей задается равной диапазону 10-40 Гц, может быть определена следующая таблица.
В заданных условиях относительно значения N и полосы частот фильтра важно не допускать перекрывания частоты после квадратурной модуляции с полосой частот 50-60 Гц (промышленными частотами).
Когда значение N выбирается так, как описано выше, полоса частот фильтрации, используемая для измерения фазы, сохраняется, и, следовательно, фильтрация может выполняться без влияния частоты возбуждения (входной частоты).
Пример использования значения N конкретно описывается здесь, но, разумеется, фактическое использование значения N зависит от заданных условий, таких как полосы частот фильтра, используемые для датчика и преобразователя.
(4) Модуль измерения фазы
Результаты, выводимые из квадратурных частотных модуляторов, подставляются для вычисления в следующее выражение отношения.
(выражение 17)

Для следующего выражения предполагается,
(выражение 18)
получается следующее выражение.
(выражение 19)

Следовательно, может быть получена разность фаз.
В другом способе вычисления для вычисления арктангенсов используются следующие выражения.
(выражение 20)

(выражение 21)

Когда получают разность между арктангенсами, может быть вычислена разность фаз.
Признак способа измерения фазы с использованием преобразования частоты
Согласно признаку системы измерения фазы в настоящем изобретении, выходные сигналы (левый сигнал LPO скорости и правый сигнал RPO скорости) из датчиков скорости вибрации (левого измерительного датчика 7 и правого измерительного датчика 8) могут дискретизироваться в интервале дискретизации, не связанном с частотой выходных сигналов (левый сигнал LPO скорости и правый сигнал RPO скорости) из датчиков скорости вибрации (левого измерительного датчика 7 и правого измерительного датчика 8), детектирующих сигналы детектирования скоростей вибрации, которые вводятся в квадратурные частотные модуляторы (более конкретно, в квадратурные частотные модуляторы 110 и 130). Следовательно, структура может быть очень простой, число таблиц фильтров может быть значительно сокращено, и при вычислении может быть достигнута небольшая ошибка.
Предусмотрено незначительное ограничение на полосу частот измерения фазы посредством входной частоты. Следовательно, может быть реализована связь с датчиками, имеющими различные частоты возбуждения, и обеспечено преимущество в том, что система, описанная выше, может применяться к различным типам. Дополнительно, входная частота не влияет на точность вычислений и, следовательно, высокоточное измерение фазы может быть всегда достигнуто.
Третий вариант осуществления
Измерительные трубки 2 и 3, включающие в себя, по меньшей мере, одну расходомерную трубку или пару расходомерных трубок, служащих в качестве измерительных расходомерных трубок, управляются посредством устройства возбуждения с использованием вибратора 6. Измерительные трубки 2 и 3, включающие в себя, по меньшей мере, одну расходомерную трубку или пару расходомерных трубок, попеременно возбуждаются посредством вибратора, чтобы вызывать вибрацию в расходомерных трубках.
В кориолисовом расходомере разность фаз и/или частота вибрации, пропорциональная кориолисовой силе, действующей на измерительные трубки 2 и 3, включающие в себя, по меньшей мере, одну расходомерную трубку или пару расходомерных трубок, детектируется посредством пары датчиков скорости или пары датчиков ускорения, соответствующих датчикам детектирования вибрации, включающим в себя левый измерительный датчик (LPO) 7 и правый измерительный датчик (RPO) 8, которые предусмотрены на правой и левой стороне расходомерных трубок 2 и 3, чтобы, тем самым, получать удельный массовый расход и/или плотность измеряемой текучей среды.
Кориолисов расходомер включает в себя модуль 120 измерения частоты для измерения частоты на основе частоты входного сигнала для цифрового входного сигнала (сигнала скорости на выходной стороне), преобразованного в цифровую форму посредством аналого-цифрового преобразователя 31 и выводимого, по меньшей мере, из одного датчика (например, левого измерительного датчика 7), из двух сигналов расхода, полученных посредством преобразования, в цифровые сигналы, для двух аналоговых входных сигналов разности фаз и/или частоты вибрации, пропорциональной кориолисовой силе, действующей на измерительные трубки 2 и 3, включающие в себя пару расходомерных трубок, которые детектируются посредством датчиков скорости или датчиков ускорения.
Дополнительно, передающее устройство 140 предусмотрено для того, чтобы формировать, передавать и выводить частотный сигнал θ(1-1/N) от цифрового частотного сигнала, выводимого из модуля 120 измерения частоты.
Дополнительно, каждый из сигналов датчика скорости (например, входной сигнал (сигнал скорости на выходной стороне), вводимый из левого измерительного датчика 7) из пары датчиков детектирования вибрации (левого измерительного датчика 7 и правого измерительного датчика 8), преобразуется в цифровой сигнал посредством двух аналого-цифровых преобразователей 31 и 35. Пара квадратурных модуляторов 110 и 130 предусмотрена для выполнения частотной квадратурной модуляции посредством выполнения суммирования (или вычитания) для частоты θ входного сигнала на основе выходной частоты θXn, выводимой из передающего устройства 140.
Модуль 150 измерения разности фаз предусмотрен для того, чтобы измерять разность фаз между частотными сигналами sinθ и sin(θ+δφ), полученными преобразованием посредством пары квадратурных частотных модуляторов 110 и 130 как постоянные частотные сигналы.
Устройство 100 обработки сигналов предусмотрено для того, чтобы получать разность фаз на основе сигнала выходной частоты, соответствующего 1/N от входной частоты левого сигнала скорости (сигнала скорости на выходной стороне), которая выводится из квадратурного модулятора 110, т.е. вводится из аналого-цифрового преобразователя 31, и сигнала выходной частоты, соответствующего 1/N от входной частоты правого сигнала скорости (сигнала скорости на входной стороне), которая выводится из квадратурного модулятора 130, т.е. вводится из аналого-цифрового преобразователя 35, чтобы тем самым выступать в качестве кориолисова расходомера.
Описание номеров позиций
1 - кориолисов расходомер
2, 3 - измерительная трубка
4 - детектор
5 - преобразователь
6 - вибратор
7 - левый датчик скорости
8 - правый датчик скорости
9 - температурный датчик
10 - модуль управления возбуждением
11 - модуль измерения фазы
12 - модуль измерения температуры
30, 34 - фильтр нижних частот
31, 35 - аналого-цифровой преобразователь
70 - датчик скорости вибрации
80 - вычислительное устройство сигналов скорости вибрации
85 - квадратурный модулятор
90 - передающее устройство
95 - модуль измерения фазы
100 - устройство обработки сигналов
110 - квадратурный модулятор
120 - модуль измерения частоты
121 - умножитель
122 - фильтр нижних частот
123 - передающее устройство для измерения частоты
130 - квадратурный модулятор
140 - передающее устройство
150 - модуль измерения разности фаз
160 - задающий генератор


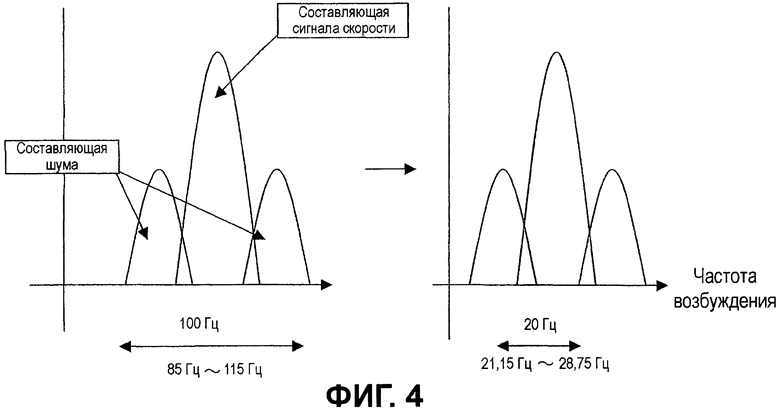






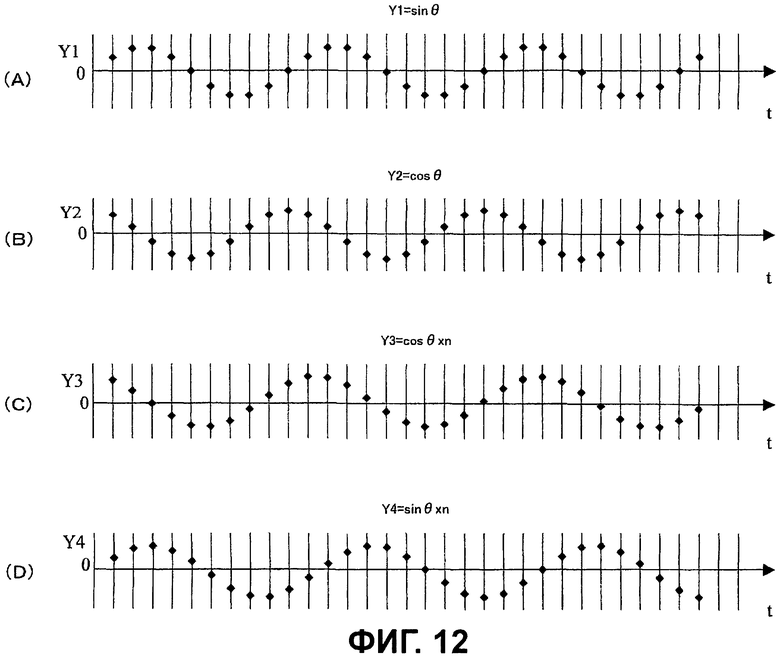
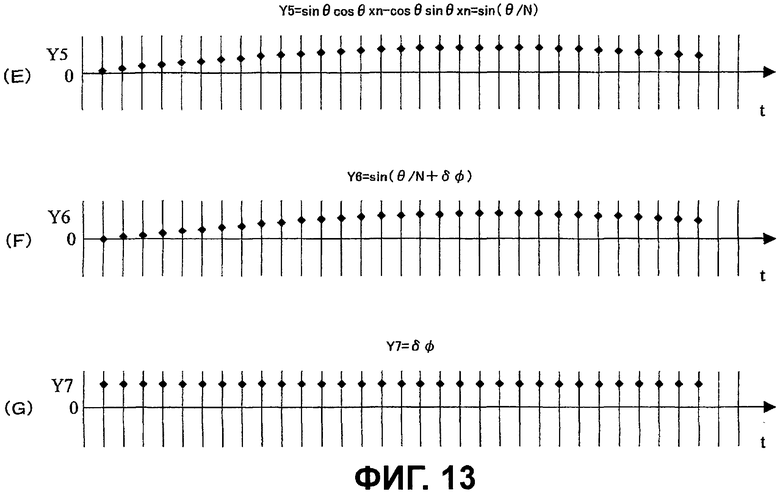

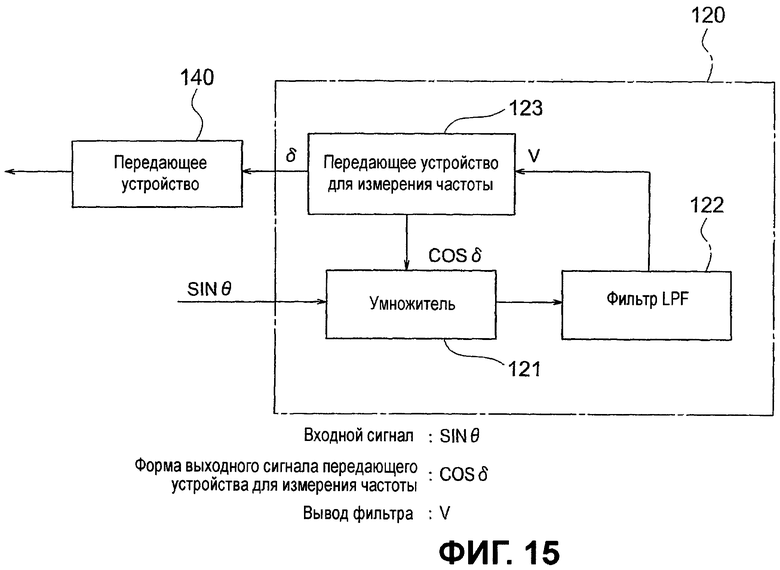


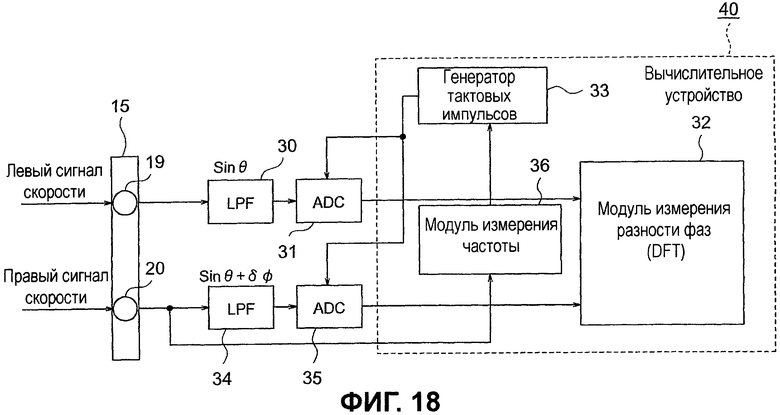

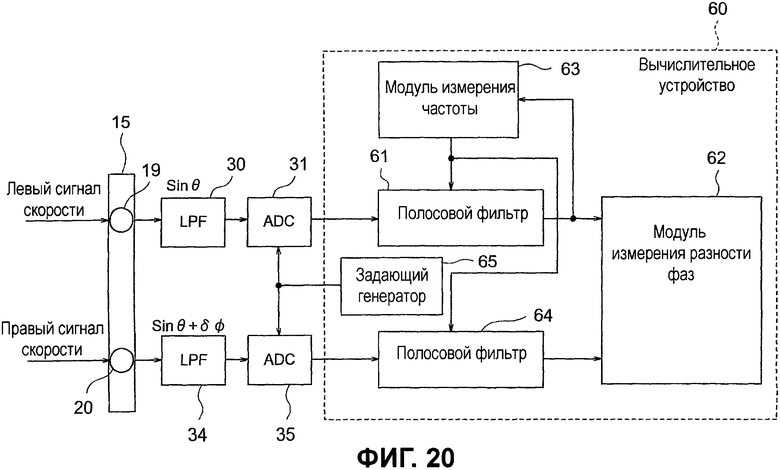
В кориолисовом расходомере детектируется разность фаз и/или частота вибрации, пропорциональная кориолисовой силе, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, чтобы тем самым получать удельный массовый расход и/или плотность измеряемой текучей среды. Кориолисов расходомер включает в себя аналого-цифровые преобразователи для преобразования аналоговых сигналов, выводимых из датчиков скорости или датчиков ускорения, которые являются парой датчиков детектирования вибрации в цифровые сигналы, пару квадратурных частотных модуляторов для выполнения преобразования частоты для цифровых сигналов, которые соответствуют паре датчиков детектирования вибрации, модуль измерения частоты для измерения частоты на основе одного цифрового сигнала, выводимого из пары датчиков детектирования вибрации, и передающее устройство для формирования частотного сигнала, соответствующего θ(1-1/N) от цифрового сигнала частоты. Разность фаз получается на основе сигналов, сформированных посредством квадратурных частотных модуляторов. Технический результат - возможность измерения с постоянной точностью и с высокой производительностью фильтрации. 3 н. и 3 з.п. ф-лы, 20 ил.
1. Способ обработки сигналов для кориолисова расходомера, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая включена в измерительную расходомерную трубку, управляется посредством устройства возбуждения с использованием вибратора, чтобы попеременно возбуждать, по меньшей мере, одну расходомерную трубку или пару расходомерных трубок, причем разность фаз и/или частота вибрации, пропорциональная кориолисовой силе, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, детектируется посредством датчиков скорости или датчиков ускорения, которые являются парой датчиков детектирования вибрации, предусмотренных на правой стороне или левой стороне, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, когда, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок вибрируют, чтобы тем самым получать удельный массовый расход и/или плотность измеряемой текучей среды,
указанный способ обработки сигналов содержит:
первый этап, на котором преобразуют аналоговые сигналы, выводимые из пары датчиков детектирования вибрации, в цифровые сигналы;
второй этап, на котором выполняют преобразование частоты в двух цифровых сигналах, которые получают посредством преобразования на первом этапе и которые соответствуют паре датчиков детектирования вибрации;
третий этап, на котором измеряют частоту на основе одного цифрового сигнала из двух цифровых сигналов, которые получают посредством преобразования на первом этапе и которые соответствуют паре датчиков детектирования вибрации; и
четвертый этап, на котором формируют частотный сигнал, соответствующий 1/N цифрового сигнала частоты, измеренной на третьем этапе, где N - произвольное число,
отличающийся тем, что разность фаз между сигналами детектирования из пары датчиков детектирования вибрации детектируют на основе частотного сигнала, соответствующего 1/N цифрового сигнала, который формируют на четвертом этапе.
2. Способ по п.1, в котором на этапе формирования частотного сигнала, соответствующего 1/N цифрового сигнала частоты θ, который выводится из модуля измерения частоты, получают частоту θх для преобразования частоты так, чтобы удовлетворялось выражение θ/N=θ-θx.
3. Способ по п.1, в котором N определяют таким образом, что частотный сигнал, соответствующий 1/N цифрового сигнала частоты θ, который выводится из модуля измерения частоты, составляет менее 50 Гц.
4. Устройство обработки сигналов для кориолисова расходомера, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая включена в измерительную расходомерную трубку, управляется посредством устройства возбуждения с использованием вибратора, чтобы попеременно возбуждать, по меньшей мере, одну расходомерную трубку или пару расходомерных трубок, причем разность фаз и/или частота вибрации, пропорциональная кориолисовой силе, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, детектируется посредством датчиков скорости или датчиков ускорения, которые являются парой датчиков детектирования вибрации, предусмотренных на правой стороне или левой стороне, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, когда, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок вибрируют, чтобы тем самым получать удельный массовый расход и/или плотность измеряемой текучей среды,
указанное устройство обработки сигналов содержит:
аналого-цифровые преобразователи для преобразования аналоговых сигналов, выводимых из пары датчиков детектирования вибрации в цифровые сигналы;
пару квадратурных частотных модуляторов для выполнения преобразования частоты в двух цифровых сигналах, которые выводятся из аналого-цифровых преобразователей и соответствуют паре датчиков детектирования вибрации;
модуль измерения частоты для измерения частоты на основе одного цифрового сигнала из двух цифровых сигналов, которые выводятся из аналого-цифровых преобразователей и соответствуют паре датчиков детектирования вибрации; и
передающее устройство для формирования частотного сигнала (θ), соответствующего θ(1-1/N) цифрового сигнала частоты, выводимого из модуля измерения частоты, где N - произвольное число,
отличающееся тем, что устройство обработки сигналов выполнено с возможностью получения разности фаз на основе сигналов, сформированных посредством пары квадратурных частотных модуляторов.
5. Устройство по п.4, в котором модуль измерения частоты для измерения частоты на основе одного цифрового сигнала из двух цифровых сигналов, которые выводятся из аналого-цифровых преобразователей и соответствуют датчикам скорости или датчикам ускорения, которые являются парой датчиков детектирования вибрации, имеет контур фазовой синхронизации (PLL) для измерения частоты.
6. Кориолисов расходомер, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая включена в измерительную расходомерную трубку, управляется посредством устройства возбуждения с использованием вибратора, для попеременного возбуждения, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, причем разность фаз и/или частота вибрации, пропорциональная кориолисовой силе, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, детектируется посредством датчика детектирования вибрации, когда, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок вибрируют, чтобы тем самым получать удельный массовый расход и/или плотность измеряемой текучей среды,
при этом кориолисов расходомер содержит устройство обработки сигналов, содержащее:
аналого-цифровые преобразователи для преобразования аналоговых сигналов, выводимых из пары датчиков детектирования вибрации в цифровые сигналы;
пару квадратурных частотных модуляторов для выполнения преобразования частоты в двух цифровых сигналах, которые выводятся из аналого-цифровых преобразователей и соответствуют паре датчиков детектирования вибрации;
модуль измерения частоты для измерения частоты на основе одного цифрового сигнала из двух цифровых сигналов, которые выводятся из аналого-цифровых преобразователей и соответствуют паре датчиков детектирования вибрации; и
передающее устройство для формирования частотного сигнала (θ), соответствующего θ(1-1/N) цифрового сигнала частоты, выводимого из модуля измерения частоты, где N - произвольное число,
отличающееся тем, что устройство обработки сигналов выполнено с возможностью получения разности фаз на основе сигналов, сформированных посредством пары квадратурных частотных модуляторов.
| JP 2005513466 А, 12.05.2005 | |||
| JP 2009500643 A, 08.01.2009 | |||
| WO 2007047524 A2, 26.04.2007 | |||
| ЭЛЕКТРОННАЯ СХЕМА ПОЛЕВОГО ПРИБОРА С СЕНСОРНЫМ БЛОКОМ ДЛЯ ТЕХНИКИ ИЗМЕРЕНИЯ ПРОЦЕССОВ | 2002 |
|
RU2289104C2 |

