Изобретение относится к способам управления пространственным положением объекта, а точнее, к способам управления полетом летательного аппарата (ЛА), особенно при испытаниях, и может быть использовано при летных испытаниях таких объектов, как ракеты всех типов и некоторых других ЛА.
Известны способы [1,2], в которых управление полетом ракет производят на пусковых установках (ПУ), используя для этого системы, в которые вводится информация о цели, и в зависимости от ее состояния коррелируется траектория полета. Однако в этих способах не учитывается состояние трассы полета, которое может значительно повлиять на изменение траектории полета, и поэтому эти способы нельзя использовать при испытаниях ракет.
Известен способ [3,4] , в котором запуск и управление полетом производится в соответствии с программой тактического программного обеспечения, формируемого наземным вычислительным комплексом, который соединен с блоком памяти программ, расположенным в ракете.
Однако в этом способе управление полетом осуществляется по заранее определенной программе, и в системе не предусмотрена возможность изменения летной ситуации в случае нештатного отклонения от заданной траектории, а поэтому этот способ нежелателен при испытаниях ракет.
Наиболее близким по технической сущности является способ управления полетом ракет [5], заключающийся в том, что на командном пункте управления полетом определяют текущие координаты и параметры движения ракеты, рассчитывают вероятную траекторию полета, формируют и передают на ракету команды на изменение траектории полета.
Так как этот способ предназначен для управления полетом боевой ракеты, направляемой на поражение цели, то поэтому в этом способе, хотя и учитывается возможность нештатного отклонения от траектории, и в начале полета им можно управлять полетом в определенных пределах, но предотвратить возможность нанесения экологического ущерба при нештатной ситуации полета и/или при резких изменениях метеорологических условий в районе цели не представляется возможным.
При таком способе можно только управлять полетом ракеты, но избежать экологического ущерба невозможно, так как в этом способе нет технологии ликвидации ракеты, и поэтому при летных испытаниях ракет этот способ использовать невозможно, и в случае нештатных отклонений от траектории или в случае изменения метеорологических условий в месте назначения избежать поражения цели невозможно.
Целью изобретения является обеспечение экологической безопасности при испытательных полетах ракет путем введения в систему обеспечения полета управление ликвидацией ракеты по сигналам, сформированным по данным о состоянии окружающей среды.
Цель достигается тем, что в известном способе управления полетом, заключающемся в том, что на командном пункте управления полетом определяют текущие координаты и параметры движения ракеты, рассчитывают вероятную траекторию полета, формируют и передают на ракету команды на изменение траектории полета, постоянно определяют и передают на командный пункт управления полетом данные о состоянии окружающей среды на трассе летных испытаний, прогнозируют возможность нештатного изменения траектории полета ракеты и возможное в этом случае загрязнение поверхности земли, водоемов и воздуха, после чего передают на ракету команду либо на продолжение полета к цели, либо на отклонение от траектории и уничтожение ракеты в районе с минимальным ущербом для окружающей среды.
От известного решения заявляемый способ отличается тем, что одновременно с определением текущих координат и параметров движения ракеты постоянно определяют и передают на командный пункт данные о состоянии окружающей среды на трассе летных испытаний, прогнозируют возможность нештатного изменения траектории полета ракеты и возможное в этом случае загрязнение поверхности земли, водоемов и воздуха, что позволяет сделать вывод о соответствии заявляемого решения критерию "новизна".
Сущность способа заключается в том, что при испытаниях в случае нештатного отклонения от траектории полета ракеты отделяемые части носителя (ступени с остатками токсичных компонентов ракетных топлив, сбрасываемые головные обтекатели (СГО) могут попасть в такой район, и падение их может нанести непоправимый экологический ущерб окружающей среде. Метеорологические условия в месте подрыва могут оставаться такими, что токсичные вещества, выделяющиеся при полета ракеты, будут распространяться в районы, уязвимые с экологической точки зрения. В известных способах управления полета [1-3], предназначенных для управления полетом боевых ракет, учитывать такую ситуацию не нужно, но при испытаниях необходимо, так как в случаях всевозможных нештатных отклонений от траектории возможно значительное загрязнение окружающей среды, которое может быть значительно снижено, если управление испытательным полетом будет осуществляться с учетом состояния окружающей среды на траектории полета и в месте назначения. Введение данных о состоянии окружающей среды на траектории полета и в месте назначения ракет на командный пункт управления полетом и постоянное прогнозирование ситуации на траектории и в месте назначения позволяют изменить траекторию полета ракеты, обеспечивая тем самым экологическую безопасность испытательных полетов путем уничтожения ракеты в районе с минимальным ущербом для окружающей среды.
Все это позволяет судить о соответствии заявляемого решения критерию "изобретательский уровень".
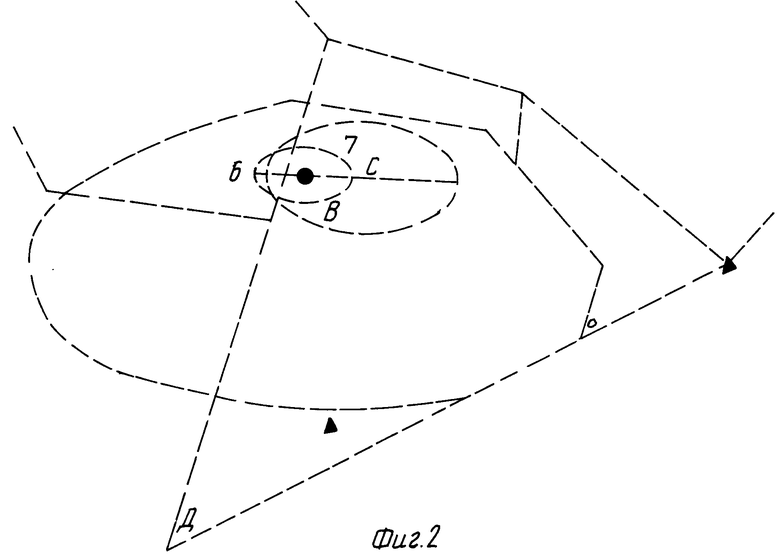
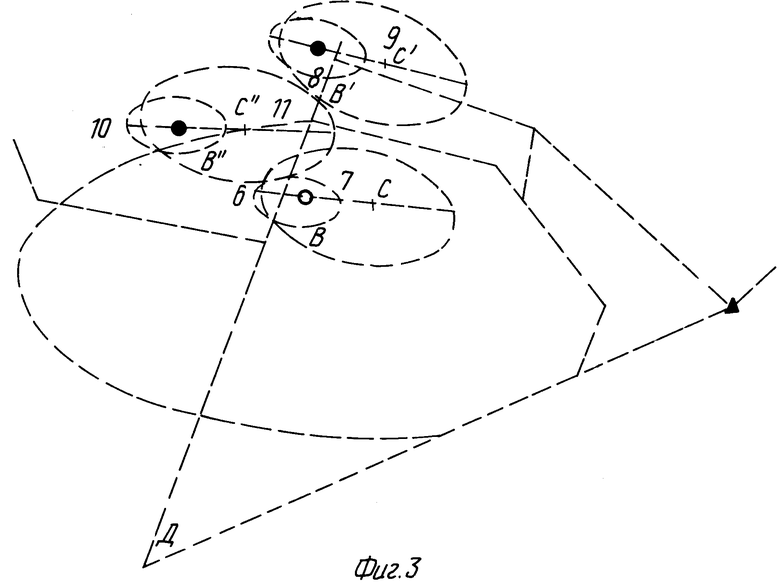
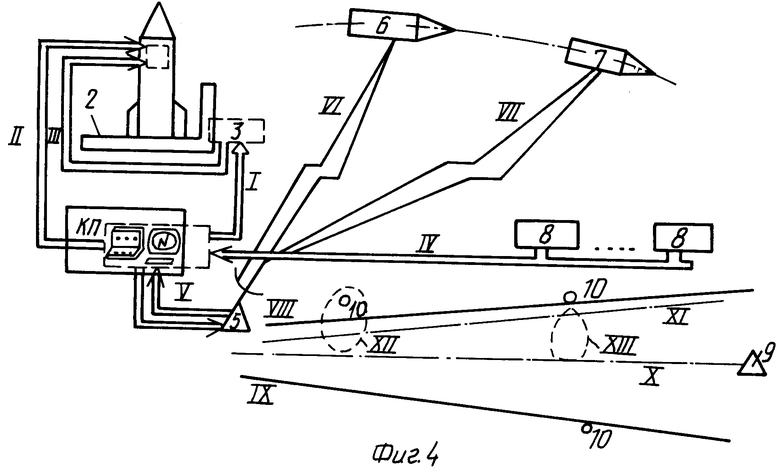
Изобретение поясняется фиг. 1-4, иллюстрирующими конкретное использование способа на примере испытания геофизической ракеты (ГФР), где на фиг. 1 показано занесенное на монитор командного пульта управления (КПУ) схематическое изображение заданной траектории полета испытываемой геофизической ракеты и траектории полета ГР в случае нештатного поведения; на фиг. 2 - схематическое изображение территории падения первой ступени и сбрасываемого головного обтекателя (СГО) на мониторе ПУ в случае штатного поведения ракеты; на фиг. 3 - схематическое изображение района падения этих же частей ракеты, вызванного изменением траектории полета заявленным способом, когда было выявлено нештатное отклонение полета ракеты и возможность загрязнения поверхности почвы и воздуха в районе падения; на фиг. 4 - блок-схема способа.
На фиг. 1 сплошная линия 1 - заданная траектория полета ракеты до цели L, линия крестиками 2 - прогнозируемая траектория полета первой ступени и СГО и ее отрезок 3 - прогнозируемая траектория падения первой ступени и СГО ракеты при штатном поведении ракеты в полете, пунктирная линия 4 и дополнительный отрезок 5 - измененные траектории полета ракеты и падения ее СГО при нештатной ситуации, эллипсы 6 и 7 на фиг. 2 и 3 - зоны возможного рассеивания отделяемых деталей изделий и загрязняющих веществ при штатном поведении ракеты, а эллипсы 8 и 9 на фиг. 3 - территории возможного поражения при нештатном поведении ракеты, - территория поражения после принятия решения об уничтожении ГР, буквами A, D, F, G, I, K обозначены пункты, на которых установлены автоматические средства определения состояния природной среды, а знаками B, C, B', C', B'', C'' - точки прогнозируемого падения отделяемых частей соответственно в случае штатной ситуации, нештатной и после принятия решения о ликвидации ГФР, на блок-схеме способа на фиг. 4 - 1 - командный пункт (КП), 2 - ПУ, 3 - компьютер ПУ, 4 - бортовое контрольное устройство на ракете, 5 - РЛС слежения, 6 - ракета в нештатной ситуации, ракету ликвидировать нельзя, 7 - ракета в нештатной ситуации, в месте, где ее нужно ликвидировать, 8 - автоматические станции метеорологических измерений и контроля загрязнения атмосферы, 9 - цель, 10 - населенные пункты, I, II, III, IV, V, VI, VII - каналы связи (информационные, управления и радиоконтроля), VIII, IX - наземные станции трассы, X - наземная проекция штатного направления полета, XI - наземная проекция нештатного направления полета, XII, XIII - зоны поражения местности при ликвидации ракеты.
В соответствии с программой исследований наводят пусковую установку на цель, затем вводят информацию о цели в компьютер КПУ, программными средствами, заложенными в компьютере КРУ, коррелируют эту информацию с информацией, постоянно принимаемой блоком управления на ракете.
Проверяется работа автоматических средств наблюдения за окружающей средой на наземной проекции трассы полета. Наблюдения за окружающей средой включают измерение скорости и направления ветра, температуры, давления и влажности воздуха. Проверяется работа средств связи этих автоматических средств с компьютером на КПУ, где после приема данных о состоянии среды срабатывает программа прогноза ситуации на трассе полета и в месте падения ракеты и/или ее ступеней.
Наземный компьютер проводит проверку готовности всех наземных и бортовых систем ракеты.
После проверки систем компьютером устанавливают стартовую "готовность", после чего снимается блокировка кнопки "старт". Оператор по информации, выведенной на экран монитора, принимает решение на запуск, одновременно с пуском ракеты производится запуск бортового контролирующего устройства.
В случае нештатного поведения ракеты оператор должен принять решение о судьбе ракеты, но решение он может принять в том случае, если вся информация о состоянии трассы полета будет в его распоряжении.
Эту информацию для принятия решения он может получить, если наземные автоматические средства наблюдения за состоянием среды, например, автоматические станции контроля загрязнения атмосферы (АСКЗА), будут расположены на трассе испытаний на таком расстоянии друг от друга, чтобы было достаточное время для принятия оператором решения и осуществления этого решения, прежде чем станет невозможным управление подлетом и/или возможность ликвидации ракеты в безопасном районе.
Такое оптимальное расстояние для размещения автоматических средств определения состояния окружающей среды на трассе полета можно определить по формуле:
l=V • (t + t'),
где
V - горизонтальная скорость полета ракеты;
t - время получения и обработки информации о состоянии окружающей среды;
t' - время принятия решения оператором;
l - расстояние между пунктами, где будут установлены автоматические средства определения состояния окружающей среды.
В приводимом примере расстояние от ПУ до цели 2500 км, скорость полета V - 8000 км/ч. Ракета после пуска будет находиться в полете около 20 мин. Для обработки и получении информации о состоянии окружающей среды от автоматических средств определения на ПУ требуется около 0,6 мин, для принятия решения оператором нужно 0,4 мин. Таким образом наземные автоматические средства определения состояния окружающей среды должны быть размещены на расстоянии l = 8000 • (0,6 + 0,4) 100 км.
При штатном поведении геофизический блок (ГБ) должен быть доставлен в точку L, траектория ее полета должна быть, как показано, сплошной линией 1, первая ее ступень и СГО должны пролететь часть 2 и упасть в точках B и C, территории их возможного падения обрисованы эллипсами 6 и 7.
На десятой секунде полета выявлено, что ракета отклоняется от заданной траектории на 0,5o к северу, и она доставит ГБ не в точку L, а в точку I, при этом ее первая ступень и СГО упадут не в точках B и C, а в точках B1 и C1, смещенных к северу.
По данным автоматических станций наблюдения в пунктах E, F, G,прогнозируется усиление южного ветра до 15 м/с с порывами до 20 м/с, а также продолжительные осадки.
Территория около точек B' и C', обрисованная эллипсами 8 и 9, находится вблизи от населенных пунктов. Падение первой ступени и СГО нежелательно в этих точках, так как возможно в сложившейся метеорологической обстановке значительное поражение загрязняющими веществами территории этих населенных пунктов.
К точкам B'' и C'' ракета подлетит через 2 мин. Оператор, получив прогнозируемую ситуацию, принимает решение об уничтожении ракеты до того как она достигнет точки B, то есть тогда, когда ракета будет еще на территории точек B и C, обрисованных эллипсами 6 и 7. После этого оператор подает команду на снятие ступеней предохранения контролирующего устройства и далее на ликвидацию ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЛЁТОМ РАКЕТЫ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2013 |
|
RU2549425C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2228543C2 |
| УНИВЕРСАЛЬНАЯ КОСМИЧЕСКАЯ ТРАНСПОРТНАЯ СИСТЕМА НА БАЗЕ СЕМЕЙСТВА РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ ЛЁГКОГО, СРЕДНЕГО И ТЯЖЁЛОГО КЛАССОВ С ЗАПУСКОМ РАКЕТ-НОСИТЕЛЕЙ НАД АКВАТОРИЕЙ МИРОВОГО ОКЕАНА | 2018 |
|
RU2729912C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С ВОЗМОЖНОСТЬЮ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРИ ВОЗНИКНОВЕНИИ НЕШТАТНОЙ (АВАРИЙНОЙ) СИТУАЦИИ | 2016 |
|
RU2632559C2 |
| СПОСОБ БОРТОВОГО КОНТРОЛЯ ДЛЯ АВАРИЙНОГО ПРЕКРАЩЕНИЯ ПОЛЕТА РАКЕТЫ | 2011 |
|
RU2476357C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ТРУБОПРОВОДА В ЗОНЕ ВЕЧНОЙ МЕРЗЛОТЫ | 2004 |
|
RU2260742C1 |
| МНОГОРЕЖИМНЫЙ САМОЛЕТ-РАЗГОНЩИК АВИАЦИОННОГО РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 1999 |
|
RU2175934C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВОЗНИКНОВЕНИИ НЕШТАТНОЙ (АВАРИЙНОЙ) СИТУАЦИИ | 2002 |
|
RU2243587C2 |
| СПОСОБ СПУСКА УСКОРИТЕЛЯ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ ПРИ АВАРИЙНОМ ВЫКЛЮЧЕНИИ ЖРД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2746473C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕСУРСА ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА С ПОЛЫМ МЕТАЛЛИЧЕСКИМ ЛОНЖЕРОНОМ И СИСТЕМОЙ СИГНАЛИЗАЦИИ ПОВРЕЖДЕНИЯ ЛОНЖЕРОНА И СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ ВЕРТОЛЕТА С ТАКИМИ ЛОПАСТЯМИ | 1998 |
|
RU2138035C1 |
Использование: ракетная техника, в частности, летные испытания ракет. Сущность изобретения: способ управления полетом ракет при летных испытаниях, заключающийся в том, что на командном пункте определяют координаты и параметры движения ракеты, получают данные о состоянии окружающей среды на трассе летных испытаний, по которым прогнозируют возможность нештатного изменения траектории полета ракеты и возможное загрязнение поверхности земли, водоемов и воздуха. По данным прогноза передают на ракету команду либо о продолжении полета, либо на отклонение от траектории и уничтожение ракеты в районе с минимальным ущербом для окружающей среды. 4 ил.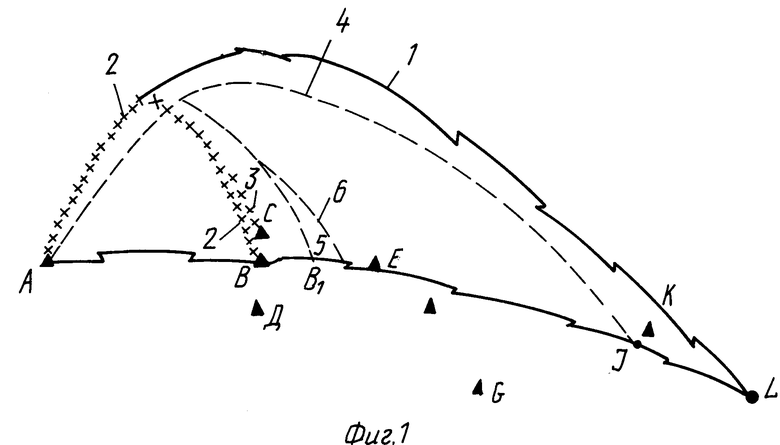
Способ управления полетом ракет при летных испытаниях, заключающийся в том, что на командном пункте управления полетом определяют текущие координаты и параметры движения ракеты, рассчитывают вероятную траекторию полета, формируют и передают на ракету команды на изменение траектории полета, отличающийся тем, что постоянно определяют и передают на командный пункт управления полетом данные о состоянии окружающей среды на трассе летных испытаний, прогнозируют возможность нештатного изменения траектории полета ракеты и возможное в этом случае загрязнение поверхности земли, водоемов и воздуха, после чего передают на ракету либо на продолжение полета к цели, либо на отклонение от траектории и уничтожение ракеты в районе с минимальным ущербом для окружающей среды.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| EP, заявка 432902, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| EP, заявка, 435589, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US, 5071087, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| DE, 3402190, к л | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кочетов В.Т | |||
| и др | |||
| Теория систем телеуправления и самонаведения ракет | |||
| - М.: Наука, 1964, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |

