Изобретение относится к области ракетной техники, в частности к устройствам для управления летательным аппаратом при возникновении нештатной (аварийной) ситуации. Актуальность данного изобретения определяется необходимостью доработки устройства, связанного с системой управления ракеты космического назначения (РКН), для обеспечения безопасности населения, хозяйственных сооружений на трассах полета, проходящих через густонаселенные районы, при возникновении (нештатных) аварийных ситуаций с целью реализации независимости и повышения точности определения местоположения летательного аппарата в момент возникновения нештатной (аварийной) ситуации.
Предпосылки создания изобретения:
В настоящее время важным вопросом исследований остается определение фактических весовых характеристик заправленной РКН непосредственно после окончания заправки перед стартом. Это необходимо прежде всего для того, чтобы оценить энергетическую возможность РКН, вывести полезный груз определенной массы на расчетную орбиту.
Современный парк средств выведения космических аппаратов (КА) состоит из многоступенчатых РКН. Для данного класса летательных аппаратов (ЛА) характерно отделение в полете отработавших элементов конструкции, для безопасного падения которых необходимо выделять специальные участки суши и акваторий морей и океанов - районы падения отделяющихся частей (РПОЧ) РКН. С выбором трасс полета тесно связаны вопросы обеспечения безопасности вдоль трассы полета РКН.
Траекторию полета РКН относительно Земли характеризуют следующие географические элементы: трасса полета, район падения отделяющихся частей ракеты-носителя (ОЧ РН), опасная зона при полете ракеты-носителя (РН).
В практике баллистического обеспечения пусков РН используются два понятия термина «трасса полета (или пуска) РН»: трасса полета, как проекция траектории полета на поверхность Земли, и аварийная трасса полета. Аварийной трассой полета называется линия на поверхности Земли, имеющая начало в точке старта и соединяющая точки падения РН, рассчитанные для случая мгновенного выключения двигательных установок (ДУ) в различные моменты движения РН по номинальной траектории. Говоря о трассе полета (ТП), имеют в виду аварийную ТП, потому что именно ее используют при выборе азимута пуска.
Район падения отделяющихся частей - участок поверхности Земли, выделенный для падения отделяющихся частей РН. Размеры РПОЧ выбираются из условия обеспечения падения ОЧ с заданной вероятностью при возмущенном движении на активном участке траектории (АУТ) и пассивном участке траектории (ПУТ). С понятием «район падения» связано понятие «зона отчуждения» (ЗО). Зона отчуждения это участок суши (акватории моря), отведенный в периодическое или постоянное пользование космодрома. ЗО может одновременно охватывать несколько РП. Из ЗО на время проведения пуска РН проводится полная эвакуация людей, домашних животных и техники. В этой зоне запрещается возведение жилых построек и промышленных предприятий.
В настоящее время применяется система безопасности, основанная на задании опасных зон как в РПОЧ, так и на трассах пуска, исходя из единых предельно-допустимых значений степени риска, используемой в качестве критерия для оценивания безопасности трассы полета.
Степень риска - это вероятность поражения (математическое ожидание числа поражений) людей, зданий, промышленных сооружений и других объектов в ходе проведения пуска РН в результате штатного и нештатного (аварийного) падения РН и ее фрагментов. Под поражением понимается: для людей смертельный исход или телесные поражения, для сооружений их полное разрушение или повреждения. Численные значения показателей степени риска, определенные для конкретного расположения и численности людей и сооружений, их защищенности, характеристик РН и ее ОЧ, определяют безопасность трассы полета и районов падения.
Оценка безопасности трасс запуска включает следующие этапы:
- решение задачи выбора трассы полета и РП;
- расчет АУТ, аварийной трассы запуска и определение РПОЧ РН;
- расчет (оценка) реальной степени риска по выбранным критериям по трассе запуска и в РП.
Расчет АУТ выполняется на основе моделирования полета РН с учетом возможного отклонения кинематических параметров РН от их номинальных значений, вероятности аварии, количества и характеристик ОЧ РН, их поражающей способности, расположения населенных пунктов, количества населения и его защищенности в них.
С вопросом обеспечения безопасности вдоль трассы полета РН связан вопрос определения границ опасной зоны при полете РН зоны возможного падения элементов РН. Зоной возможного падения элементов РН называется полоса вдоль трассы полета, в пределах которой возможно падение фрагментов конструкции при аварийном завершении полета РН.
Для определения возможных зон падения элементов РН используются данные моделирования их движения на АУТ и ПУТ. В качестве осевой линии зоны падения принимается линия, соединяющая точки падения, полученные при выключении ДУ РН с некоторым шагом по времени полета на номинальной траектории АУТ и при отсутствии возмущений на ПУТ. Пределы зоны ограничиваются линиями, соединяющими точки падения, полученные при выключении ДУ РН на траектории с предельными отклонениями в боковой плоскости и при максимальном воздействии ветровых возмущений в боковом направлении во время движения элементов РН на ПУТ.
Значительное расширение круга задач, решаемых с помощью космических средств, требует существенного повышения безопасности их использования.
Открытие новых трасс запуска осуществляется с учетом существующих РП. На космодроме открыты новые трассы запусков КА для РКН «Рокот» на приполярные и солнечно-синхронные орбиты. Данные работы проводятся с обязательной оценкой безопасности трасс и районов падения, контрольным облетом трасс запуска и с применением участков запрета на выключение двигательных установок РКН для пролета особо опасных участков трассы. Так, например, для РКН «Рокот» запретные участки существуют с 68 по 96 секунды и со 108 по 126 секунды полета 1 ступени над территорией Архангельской области (вблизи от населенных пунктов Таборы, Лахты, Белое озеро, г.Северодвинск и территории Пермиловского санитарно-гидрологического заказника). Для РКН «Союз-2» таким участком является интервал времени с 53 по 66 секунду полета (населенный пункт Емца).
Об актуальности исследований по обоснованию и разработке бортового устройства для обеспечения безопасности в произвольных районах по трассе полета свидетельствует статистика аварий при пусках эксплуатируемых РКН.
Всю совокупность отказов, возникающих в работе систем и агрегатов РН в полете, можно разбить по основным системам и агрегатам РН. По статистическим данным космодрома «Плесецк» весь спектр отказов систем и агрегатов РН «Союз-У», «Молния-М», «Космос-3М» и «Циклон-3» можно классифицировать следующим образом:
- отказы в двигательной установке и пневмогидросистеме 57%;
- отказы в бортовой электроавтоматике и источниках питания 7.5%;
- конструкционные неисправности 7.5%;
- отказы в системе управления 28%.
Среднестатистическая надежность эксплуатации средств выведения составляет РСВ=0,90-0,96, причем отказы различных систем, приводящие к аварии РКН, могут возникнуть практически на любом отрезке АУТ.
Значительное расширение круга задач, решаемых с помощью космических средств, требует существенного повышения безопасности их использования.
Использование на перспективных РКН («Союз-2», «Ангара») бортовых цифровых вычислительных комплексов (БЦВК), применение в их системах управления принципов терминального наведения позволяет в контур управления полетом РН ввести устройство, снижающее отрицательные последствия аварии.
Системы управления современных РКН обеспечивают безопасность в районах, отчуждаемых специально для падения отделяющихся частей РКН (первые, вторые ступени, головные обтекатели, хвостовые отсеки).
Например, на космическом комплексе «Союз» предусмотрена стабилизация полета РКН во всех точках траектории на активных участках полета, программный разворот в плоскости тангажа, управление режимом работы, элементами выключения и включения двигательных установок (ДУ), подача команд на системы разделения и сброса пассивных масс, контроль параметров функционирования агрегатов и систем на борту (параметров аварийности).
В качестве параметров аварийности приняты: потеря устойчивости и управляемости; критический недобор скорости к концу работы ступеней ЛА; падение давления в камере сгорания ДУ; критическое снижение осевой перегрузки при работе ДУ; параметры функционирования агрегатов.
Известно устройство для управления летательным аппаратом при возникновении нештатной (аварийной) ситуации (патент RU №2243587 от 27.12.2004), которое относится к устройствам управления ЛА, обеспечивающим безопасность населения и инфраструктуры вдоль трассы полета ЛА.
Целью изобретения является разработка устройства с независимым определением точного местоположения РКН, связанного с системой управления ракеты космического назначения (РКН), для обеспечения безопасности населения, хозяйственных сооружений на трассах полета, проходящих через густонаселенные районы, при возникновении (нештатных) аварийных ситуаций.
Причиной, препятствующей получению прототипным устройством технического результата, который обеспечивается предлагаемым техническим решением, является то, что система управления ЛА в процессе измерения и расчета текущих навигационных параметров накапливает систематическую и инструментальную погрешность, которая влияет на точность определения координат местоположения ЛА.
Задачей изобретения является разработка устройства, связанного с системой управления ракеты космического назначения (РКН), с независимым определением уточнения данных местоположения, для обеспечения безопасности населения, хозяйственных сооружений на трассах полета, проходящих через густонаселенные районы, при возникновении (нештатных) аварийных ситуаций.
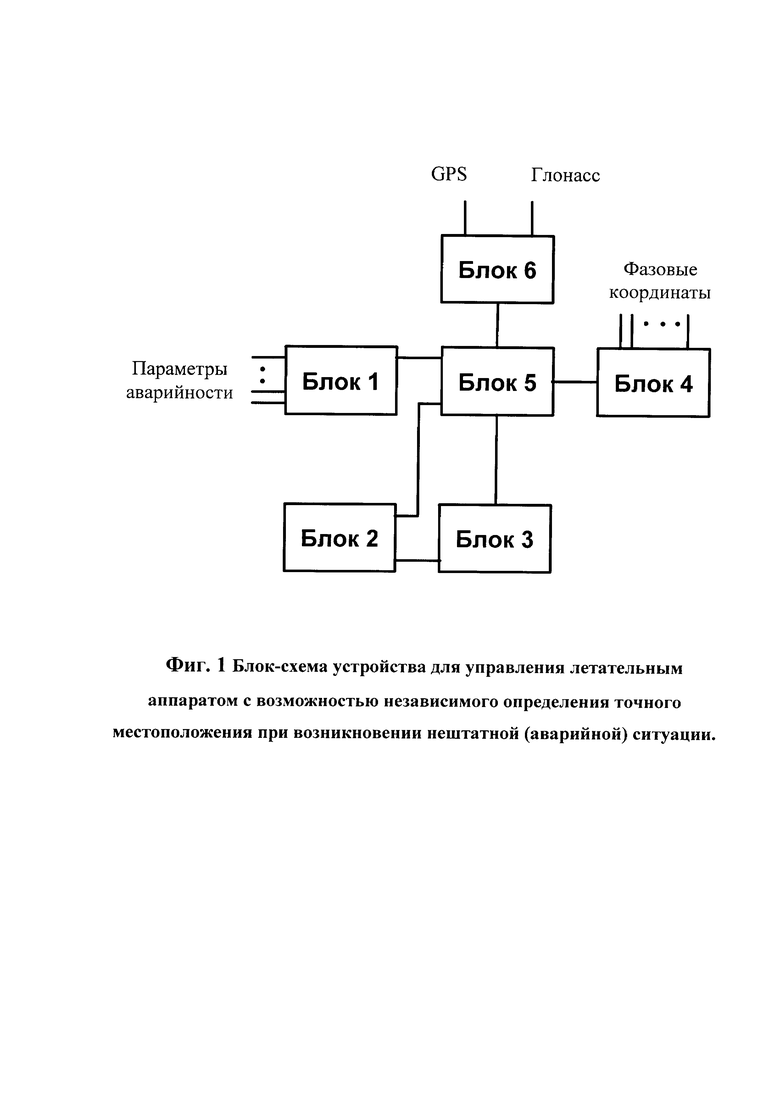
Заявлено устройство, связанное с системой управления ракеты космического назначения (РКН), с независимым определением точного местоположения РКН, показанное схематично на фиг. 1.
Предлагаемое изобретение отличается от известного тем, что содержит дополнительный блок 6 (фиг. 1) независимого определения точного местоположения РКН (фазовых координат) в момент аварии (нештатной ситуации).
Техническим результатом изобретения является возможность независимого определения точного местоположения РКН в момент аварии (нештатной ситуации).
Требуемый технический результат достигается тем, что в известное устройство вводится дополнительный блок независимого определения точного местоположения РКН в момент аварии (нештатной ситуации).
Блок-схема предлагаемого устройства содержит блок контроля аварийности (1), блок локализации зон аварийности (2), блок ДУ (3), блок памяти зон фазовых координат (4), счетно-решающий блок (5), выход которого соединен с соответствующим входом блока ДУ. Другие входы счетно-решающего блока соединены с выходом блока независимого определения фазовых координат (6), блока памяти фазовых координат, контроля аварийности и входом блока локализации параметров аварийности, выход которого соединен с входом блока ДУ.
В качестве блока контроля аварийности, предназначенного для выполнения задач измерений параметров аварийности, могут применяться различные типы датчиков. Например, значения давления жидкостей и газовых сред; значение линейных осевых и боковых перегрузок при работе ДУ; потеря устойчивости и управляемости, критические недоборы скорости; значение температур регистрируется.
Блок локализации зон аварийности предназначен для многоступенчатой коммутации каналов аварийных параметров, их локализации и выдачи команд на выключение ДУ. В состав блока может входить многоступенчатый коммутатор системы, обуславливающий применение локальных коммутаторов, командно-коммутационный прибор, обеспечивающий локализацию аварийных параметров и формирующий командные сигналы на выключение ДУ.
Блок ДУ имеет в своем составе систему управления - режимами работы, элементами включения и выключения маршевых ДУ, а также управляющие ДУ, ДУ увода.
В качестве блока памяти зон фазовых координат, предназначенного для постоянного хранения фазовых координат зон, неразрешенных для падения ЛА и выдачи их по запросу счетно-решающего блока, может использоваться запоминающее устройство типа НЖМД (накопитель на жестких магнитных дисках).
Счетно-решающий блок предназначен для организации работы всех блоков данного устройства, для проведения расчетов по результатам текущих навигационных измерений. В качестве счетно-решающего блока можно использовать БЦВМ (бортовую цифровую вычислительную машину).
В качестве блока независимого определения фазовых координат (6), предназначенного для независимого определения точного местоположения РКН, может быть использована система спутниковой навигации, которая использует в качестве входных данных эфемериды системы GPS и (или) ГЛОНАСС.
Разработанное бортовое устройство для обеспечения безопасности в произвольных районах по трассе полета РКН отличается от известного устройства управления ЛА в полете тем, что оно содержит: дополнительный блок независимого определения фазовых координат (6), выход которого связан с выходом счетно-решающего блока, предназначенного для организации работы всех блоков данного устройства и для проведения расчетов, выходы которого соединены с соответствующим входом блока локализации параметров и блока ДУ; другие входы счетно-решающего блока соединены с выходом блока контроля аварийности, памяти зон фазовых координат; выход блока локализации зон соединен с соответствующим входом блока ДУ.
Перед проведением полета РН фазовые координаты не разрешенных для падения РН зон определяют в прямоугольной системе координат, построенной на сферической Земле, центр которой расположен в центре масс сферической Земли, с радиусом, равным 6371,11 км. Центр прямоугольной системы координат расположен в точке отсчета, ось дальности находится в плоскости траектории полета РН и направлена в сторону полета, ось направления перпендикулярна к оси дальности и направлена вправо от траектории полета.
В качестве фазовых координат неразрешенных зон могут задаваться: количество неразрешенных зон N, дальность Li и боковое отклонение Zi каждой из зон, где i=1…N центров зон в прямоугольной системе координат.
Эти координаты перед проведением полета РН вводят в блок памяти фазовых координат.
При достижении предельных значений по любому из параметров аварийности в процессе полета РН блок контроля аварийности выдает сигнал «Авария» в счетно-решающий блок, который в свою очередь выдает сигнал «Авария» в блок локализации зон аварийности, формирующий команду на выключение маршевых ДУ соответствующей ступени.
В счетно-решающем блоке постоянно рассчитываются прогнозируемые фазовые координаты точки падения РН, по результатам текущих навигационных измерений.
После поступления на вход счетно-решающего блока сигнала «Авария» из блока памяти фазовых координат выдаются хранящиеся там фазовые координаты неразрешенных для падения РН зон, которые сравниваются с прогнозируемыми фазовыми координатами точки падения РН с помощью неравенств:

где i=1, …, N - количество зон,
Lп, Zп - прогнозируемые фазовые координаты точки падения РН.
В счетно-решающем блоке вырабатывается команда, поступающая на вход блока ДУ, для включения ДУ увода. При невыполнении неравенств (1) счетно-решающий блок выдает команду в блок ДУ на выключение ДУ увода.
При поступлении сигнала «Авария» в счетно-решающий блок, в нем осуществляется расчет показателя степени риска, например, математического ожидания ущерба третьей стороны для двух альтернативных вариантов реакции на сигнал «Авария» выключением ДУ с подрывом или без подрыва ЛА.
Показатель риска определяется по следующим зависимостям:

где
Р - вероятность падения на i-й опасный район;
Ni - количество людей, объектов в i-м опасном районе;
Ci - стоимость ущерба одного j единиц;
Sпj - площадь поражения j-го объекта;
Si - площадь i-го района.
И по минимальному показателю степени риска счетно-решающий блок осуществляет управление ДУ увода с подрывом или без подрыва РН.
Проведенные расчеты показывают, что энергетические возможности по уводу РН могут обеспечивать решение поставленной задачи. Так, например, для типичной траектории выведения (высота конечной круговой орбиты составляет 200 км) при начальной тяговооруженности, равной 0.152, максимальная дальность увода при возникновении нештатной ситуации на 60 сек после старта РН достигает 0.5 км, а на 80 сек - 3 км; при начальной тяговооруженности, равной 0.753, максимальная дальность увода достигает 3 и 15 км соответственно.
Следовательно, разработанное устройство при возникновении нештатной ситуации позволяет обеспечить безопасность населения, хозяйственных сооружений по трассе полета РН.
Уравнения движения РН на пассивном участке полета и при полете РН с работающим двигателем увода приведены ниже:
- уравнения движения в гринвичской системе координат:
- геодезические координаты точки падения:

- отклонение точки падения от заданной:

- бортовой алгоритм РН «Союз-2»:

- полет РН с двигателем увода (уравнения движения РН в инерциальной начальной стартовой системе координат):

Таким образом, положительный эффект установки дополнительного блока независимого определения фазовых координат (6) состоит:
- в обеспечении независимого точного определения местоположения РКН;
- в обеспечении большей точности определения местоположения РКН;
- в невысокой стоимости предлагаемого изобретения, так как в качестве предлагаемого блока может быть использована любая стандартизированная система спутниковой навигации, освоенная отечественной промышленностью.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Сихарулидзе Ю.Г., Баллистика ЛА. - М.: Наука, 1982 г., с 146.
2. Феоктистов К.П., Космические аппараты. - М.: Воениздат, 1983 г., с. 282-284.
3. Эльясберг. П.Е. Введение в теорию полета искусственных спутников Земли. М., Наука, 1965. 538 с.
4. Эльясберг П.Е. Определение движения по результатам измерений. М.: Главная редакция физико-математической литературы издательства «Наука», 1976, 416 с.
5. Управление расходованием топлива как средство повышения энергетики жидкостной ракеты / Б.Н. Петров, Ю.П. Портнов-Соколов, А.Я. Андриенко, В.П. Иванов // Навигация, наведение и оптимизация управления. - М: Наука, 1978. - С. 67-76.
6. Проектирование и испытания баллистических ракет / Под ред. В.И. Варфоломеева и М.И. Копытова. - М.: Оборонгиз, 1970. - 392 с., ил.
7. Конструкция и проектирование космических летательных аппаратов: Учебник для средних учебных заведений / Н.И. Паничкин, Ю.В. Слекушкин, В.П. Шинкин, Н.А. Яцинин. - М.: Машиностроение, 1986. - 344 с., ил.
8. Пенцак И.П. Теория полета и конструкция баллистических ракет: Учебное пособие для техникумов. - М.: Машиностроение, 1974. - 344 с., ил.
Устройство для управления летательным аппаратом с возможностью независимого определения точного местоположения ракеты космического назначения (РКН) при возникновении нештатной или аварийной ситуации содержит блок контроля аварийности, блок локализации зон аварийности, блок двигательных установок (ДУ), блок памяти зон фазовых координат, счетно-решающий блок, блок независимого определения фазовых координат точного местоположения РКН в момент нештатной или аварийной ситуации, соединенные определенным образом. Обеспечивается возможность независимого определения точного местоположения РКН в момент аварии или нештатной ситуации. 1 ил. 
Устройство для управления летательным аппаратом с возможностью независимого определения точного местоположения ракеты космического назначения (РКН) при возникновении нештатной или аварийной ситуации содержит блок контроля аварийности, блок локализации зон аварийности, блок двигательных установок (ДУ), блок памяти зон фазовых координат, счетно-решающий блок, отличающееся тем, что дополнительно содержит блок независимого определения фазовых координат точного местоположения РКН в момент нештатной или аварийной ситуации, на вход которого поступают сигналы GPS и ГЛОНАСС, а его выход связан с входом счетно-решающего блока, выходы которого соединены с входом блока локализации зон аварийности, входом блока ДУ, с выходом блока контроля аварийности и выходом блока памяти зон фазовых координат, выход блока локализации зон аварийности соединен с входом блока ДУ.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВОЗНИКНОВЕНИИ НЕШТАТНОЙ (АВАРИЙНОЙ) СИТУАЦИИ | 2002 |
|
RU2243587C2 |
| Автоматический наполнитель консервной и т. п. тары плодами | 1960 |
|
SU137814A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2147009C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТЕРПЯЩЕГО БЕДСТВИЕ ТРАНСПОРТНОГО СРЕДСТВА И ПОДДЕРЖКИ ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2240587C1 |
| US 7561881 B2, 14.07.2009. | |||

