Изобретение относится к области ракетно-космической техники и может быть использовано для управления беспилотных летательных аппаратов (ЛА) при возникновении нештатной (аварийной) ситуации на трассах полета, проходящих через густонаселеннные районы.
Значительное расширение круга задач, решаемых с помощью космических средств, требует существенного повышения безопасности их использования.
Известен способ управления ЛА в процессе испытаний, включающий контроль работоспособности элементов объекта, фиксацию отказов, прогноза точки приземления по значениям параметров полета, сравнения прогнозируемых координат точки приземления с координатами разрешенной зоны падения и разворота ЛА в том направлении, при котором координаты прогнозируемой точки падения будут находиться в пределах разрешенной зоны (см. АС N 226147, заявка N 3087886, 1984 год).
Наиболее близким по технической сущности и достигаемому результату является устройство управления ЛА на космическом комплексе "Союз", предусматривающее стабилизацию полета ЛА во всех точках траектории на активных участках полета, программного разворота в плоскости тангажа, управление режимом работы, элементами выключения и включения двигательных установок (ДУ), подачи команд на системы разделения и сброса пассивных масс, контроль параметров фунционирования агрегатов и систем на борту (параметров аварийности). В качестве параметров аварийности приняты: потери устойчивости и управляемости, критический недобор скорости к концу работы ступеней ЛА, падение давления в камере сгорания ДУ, критическое снижение осевой перегрузки при работе ДУ и параметры фунционирования агрегатов.[1, 2, 3]
Данное устройство для управления ЛА обладает тем недостатком, что оно при аварийном завершении полета не учитывает возможность падения ЛА в произвольные районы по трассе полета, в которых могут оказаться населенные пункты, что может вызвать несчастные случаи среди населения, разрушение жилищных и промышленных сооружений.
Целью настоящего изобретения является обеспечение безопасности населения, хозяйственных сооружений при возникновении (нештатной) аварийной ситуации по трассе полета ЛА.
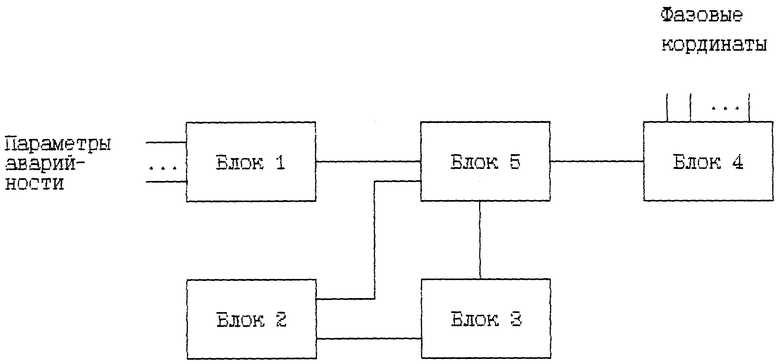
Блок-схема предлагаемого устройства представлена на чертеже. Оно содержит блок контроля аварийности (1), блок локализации параметров аварийности (2), блок ДУ (3), блок памяти фазовых координат (4), счетно-решающий блок (5), выход которого соединен с соответствующим входом блока ДУ, другие входы которого соединены с выходом блока памяти фазовых координат, контроля аварийности и входом блока локализации параметров аварийности, выход которого соединен с входом блока ДУ.
В качестве блока контроля аварийности, предназначенного для выполнения задач измерений параметров аварийности, могут применяться различные типы датчиков. Например, значения давления жидкостей и газовых сред (МД-Т, ЭДД, ДДМ); значение линейных осевых и боковых перегрузок при работе ДУ (МП-95); потеря устойчивости и управляемости (ЛХ 733-2,5-П), критические недоборы скорости (ИПГ); значение температур регистрируется (СИТ-17).
Блок локализации параметров аварийности предназначен для многоступенчатой коммутации каналов аварийных параметров, их локализации и выдачи команд на выключение ДУ. В состав блока может входить многоступенчатый коммутатор системы типа (БР-92Р), обуславливающий применение локальных коммутаторов, командно-коммутационный прибор типа (11Л1127), обеспечивающий локализацию аварийных параметров и формирующий командные сигналы на выключение ДУ.
Блок ДУ имеет в своем составе систему управления режимами работы, элементами включения и выключения ДУ, 6 ДУ: центральную ДУ, 4 боковых ДУ и ДУ верхней ступени, а также управляющие ДУ, ДУ увода.
В качестве блока памяти фазовых координат, предназначенного для постоянного хранения фазовых координат зон, неразрешенных для падения ЛА и выдачи их по запросу счетно-решающего блока, может использоваться запоминающее устройство типа ЖМД (накопитель на жестких магнитных дисках).
Счетно-решающий блок предназначен для организации работы всех блоков данного устройства, для проведения расчетов по результатам текущих навигационных измерений. В качестве счетно-решающего блока можно использовать БЦВМ.
Предлагаемое устройство работает следующим образом.
Перед проведением полета ЛА определяют фазовые координаты неразрешенных для падения ЛА зон, определяют в прямоугольной системе координат, построенной на сферической Земле, центр которой расположен в центре масс сферической Земли, с радиусом, равным 6371,11 км. Центр прямоугольной системы координат расположен в точке отсчета, ось дальности находится в плоскости траектории полета ЛА и направлена в сторону полета, ось направления перпендикулярна к оси дальности и направлена вправо от траектории полета.
В качестве фазовых координат неразрешенных зон могут задаваться: количество N неразрешенных зон, протяженность li, где i=1...N зон, дальность Li, где i=1...N зон, и боковое отклонение Zi, где 1=1...N центров зон в прямоугольной системе координат.
Эти координаты перед проведением полета ЛА вводят в блок памяти фазовых координат.
При достижении предельных значений по любому из параметров аварийности в процессе полета ЛА блок контроля аварийности выдает сигнал "Авария" в счетно-решающий блок, который в свою очередь выдает сигнал "Авария" в блок локализации параметров аварийности, формирующий команду на выключение ДУ соответствующей ступени.
В счетно-решающем блоке постоянно рассчитываются прогнозируемые фазовые координаты точки падения ЛА, по результатам текущих навигационных измерений.
После поступления на вход счетно-решающего блока сигнала "Авария" из блока памяти фазовых координат выдаются хранящиеся там фазовые координаты неразрешенных для падения ЛА зон, которые сравниваются с прогнозируемыми фазовыми координатами точки падения ЛА с помощью неравенств

где i=1, ..., N - количество зон;
LП, ZП - прогнозируемые фазовые координаты точки падения ЛА.
В счетно-решающем блоке вырабатывается команда, поступающая на вход блока ДУ, для включения ДУ увода. При невыполнении неравенств (1) счетно-решающий блок выдает команду в блок ДУ на выключение ДУ увода.
При поступлении сигнала "Авария" в счетно-решающий блок, в нем осуществляется расчет показателя степени риска, например, математического ожидания ущерба третьей стороны для двух альтернативных вариантов реакции на сигнал "Авария" выключением ДУ с подрывом или без подрыва ЛА.
Показатель риска определяется по следующим зависимостям:

где Р - вероятность падения на i-й опасный район;
Ni- количество людей, объектов в i-м опасном районе;
Ci- стоимость ущерба одного j единиц;
SПj- площадь поражения j-го объекта;
Si- площадь i-го района.
И по минимальному показателю степени риска счетно-решающий блок осуществляет управление ДУ увода с подрывом или без подрыва ЛА.
Проведенные расчеты показывают, что энергетические возможности по уводу ЛА могут обеспечивать решение поставленной задачи. Так, например, для типичной траектории выведения (высота конечной круговой орбиты составляет 200 км) при начальной тяговооруженности, равной 0,152, максимальная дальность увода, при возникновении нештатной ситуации на 60 с после старта ЛА достигает 0,5 км, а на 80 с - 3 км; при начальной тяговооруженности, равной 0,753, максимальная дальность увода достигает 3 и 15 км соответственно.
Следовательно, предлагаемое устройство для управления ЛА при возникновении нештатной ситуации позволяет обеспечить безопасность населения, хозяйственных сооружений по трассе полета ЛА.
Отличительными признаками предлагаемого изобретения по мнению авторов являются:
1. Новая совокупность конструктивных элементов:
- блок контроля аварийности;
- блок локализации параметров аварийности;
- блок памяти фазовых координат;
- блок счетно-решающий.
2. Наличие новых связей:
- блок ДУ соединен со счетно-решающим блоком и блоком локализации параметров аварийности;
- блок счетно-решающий соединен с блоком контроля аварийности и блоком памяти фазовых координат.
Литература
1. Основы проектирования ЛА (транспортные системы). Учебник для технических ВУЗов. /Под ред. В.П.Мишин - М.: Машиностроение, 1985 г., с.172-173.
2. Космические аппараты. /Под общ. ред. К.П.Феоктистова -М.: Воениздат, 1983 г., с.282-284.
3. Баллистика ЛА. Сихарулидзе Ю.Г. - М.: Наука, 1982 г., с.146, 180.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С ВОЗМОЖНОСТЬЮ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРИ ВОЗНИКНОВЕНИИ НЕШТАТНОЙ (АВАРИЙНОЙ) СИТУАЦИИ | 2016 |
|
RU2632559C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЁТОМ РАКЕТЫ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2013 |
|
RU2549425C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1994 |
|
RU2114374C1 |
| СПОСОБ БОРТОВОГО КОНТРОЛЯ ДЛЯ АВАРИЙНОГО ПРЕКРАЩЕНИЯ ПОЛЕТА РАКЕТЫ | 2011 |
|
RU2476357C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2191343C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2228543C2 |
| СПОСОБ АВАРИЙНОЙ ПОСАДКИ КВАДРОКОПТЕРА | 2017 |
|
RU2657659C1 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2446481C2 |
| Ракета с пространственным ограничением траектории полета | 2022 |
|
RU2788218C1 |
Изобретение относится к технике управления беспилотными летательными аппаратами (ЛА) при возникновении нештатной (аварийной) ситуации на трассах полета, проходящих через густонаселенные районы. Устройство содержит блок двигательной установки (ДУ), предназначенный для выдачи тяговых и управляющих импульсов, и блок контроля аварийности. Кроме того, оно снабжено блоком памяти зон фазовых координат и счетно-решающим блоком, предназначенным для организации работы всех блоков и для проведения расчетов, а также блоком локализации зон аварийности. Последний формирует на своем выходе команду на включение управляющих ДУ, подаваемую на соответствующий вход блока ДУ. Счетно-решающий блок соединен входами с блоками контроля аварийности и памяти зон фазовых координат, а выходами - с блоком локализации зон аварийности и с блоком ДУ для выдачи в этот блок команд на включение и выключение ДУ увода ЛА. Изобретение обеспечивает безопасность населения и хозяйственных сооружений при возникновении нештатной (аварийной) ситуации по трассе полета ЛА. 1 ил.
Устройство для управления летательным аппаратом (ЛА) при возникновении нештатной ситуации, содержащее блок двигательной установки (ДУ), предназначенный для выдачи тяговых и управляющих импульсов, и блок контроля аварийности, отличающееся тем, что оно снабжено блоком памяти зон фазовых координат и счетно-решающим блоком, предназначенным для организации работы всех блоков и для проведения расчетов, а также блоком локализации зон аварийности, формирующим на своем выходе команду на включение управляющих ДУ, подаваемую на соответствующий вход блока ДУ, при этом выходы счетно-решающего блока соединены с входом блока локализации зон аварийности и с блоком ДУ для выдачи в этот блок команд на включение и выключение ДУ увода ЛА, а входы счетно-решающего блока соединены с выходами блоков контроля аварийности и памяти зон фазовых координат.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2147009C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2152637C1 |
| СПОСОБ ВЫВОДА ВОЗДУШНО-КОСМИЧЕСКОГО САМОЛЕТА В КОСМОС И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2085449C1 |
| СПОСОБ ДОСТАВКИ ГРУЗОВ В КОСМОС И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2085448C1 |

