Изобретение относится к горной промышленности, главным образом для подземной выемки угля, с применением очистных комбайнов и гидрофицированных крепей.
Известны и широко применяются очистные механизированные комплексы, например комплексы типа IMK-97(1), KM-81(2) и KМ103(3), включающие соответствующие крепи, конвейеры и комбайны, имеющие гидроблоки местного управления секциями крепи, электропульты местного управления комбайна, а также управляемые механизмы распора крепи в виде стоек, механизмы передвижения крепи в виде гидродомкратов, механизмы подъема и опускания верхнего и нижнего шнека комбайна, обеспечивающие отбойку нижней и верхней пачки угля в зависимости от изменения мощности пласта и гипсометрии его залегания.
Недостатком известных способов является необходимость присутствия и передвижения человека по лаве в условиях загазованности атмосферы и большой трудоемкости управления комбайном и крепью.
Известно устройство для облегчения управления крепью и исполнительным угледобывающим струговым органом агрегата AK-3 (4), включающее тележку подъемника для перемещения человека по лаве агрегата и центральный пульт управления для обеспечения дистанционного управления фронтальной передвижки става и фронтальной групповой передвижки секций крепи по групповым гидромагистралям.
Недостатком известного устройства является расположение и передвижение человека на тележке в условиях запыленной атмосферы и затруднительность контроля движения агрегата в соответствии с гипсометрией пласта из-за отсутствия у оператора информации о положении границы уголь-порода и недостаточность средств контроля выдвижки секций крепи на центральном пульте управления.
Целью изобретения является обеспечение, согласно способу, фактора присутствия человека в зоне работы комбайна и крепи с обеспечением санитарных норм по запыленности атмосферы и обеспечение легких и комфортных условий труда оператора.
Целью изобретения механизма и устройства является изоляция человека от запыленной среды в зоне его работы, обеспечение полной механизации операций управления в комфортных условиях размещения человека и его работы в сидячем положении и механизация взятия пробы угля и породы из почвы и кровли пласта.
Указанная цель достигается тем, что, согласно способу, управление движением и настройкой по мощности и гипсометрии пласта комбайна осуществляется способом движение оператора в тележке вблизи и синхронно с движением комбайна на расстоянии протянутой руки пульта, управление выдвижки верхняков крепи производится способом остановок тележки у пультов крепи на расстоянии протянутой руки машиниста, а контроль пачки угля в кровле и почвы производится периодическим взятием пробы механизмом, расположенным на тележке, за счет гидроэнергии, получаемой от гидропультов крепи /от комбайна/.
Указанная цель достигается также тем, что согласно устройству, тележка для перемещения оператора перемещается в зоне перед стойками по двум направляющим, внутри которых постоянно движется кольцевая цепь, с которой периодически соединяется тележка, снабженная рукояткой сцепления, полость тележки герметизирована прозрачным куполом с форточками для рук оператора, а пульты управления комбайном n секций крепи закреплены на комбайне и на ставе непосредственно вплотную к траектории движения упомянутых форточек, причем тележка оборудована манипулятором с гидроотбойной ложкой для взятия пробы, управляемым с пульта оператора, и снабжена вентилятором с пылегасителем, работающим от аккумуляторов, и снабжена также пистолетом для периодического подключения к гидроэнергии на пультах управления секций крепи.
На фиг. 1 представлен общий вид угледобывающего комплекса, оборудованного устройством для управления комбайном и крепью, поперечное сечение по лаве.
Комплекс состоит из секций крепи 1, комбайна 2, става 3 с конвейером 4, желобом для кабелеукладчика 5, тележки 6, движущейся по двум трубчатым направляющим 6 става 3 за счет кольцевой цепи 8, расположенной внутри, с приводом 9, расположенным на штреке (на чертеже не показан), и гидрооборудования 10, питающегося от гидромагистралей 11, проложенных по ставу 8 через гидроблок 12, и шлангов 13 и трубопроводов 14.
Секция крепи 1 состоит из перекрытия 15, ограждения 16, стоек 17, основания 18 с двигательными домкратами 19.
Комбайн состоит из корпуса 20, верхнего шнека 21, нижнего шнека 22 на поворотных рукоятках 23, приводящихся в движение домкратами 24, электродвигателей 25, питающихся от кабелеукладчика 5 через пульт управления 26, который управляет также гидродомкратами 24 в зависимости от высоты подрубки почвы или кровли, а также управляет приводом звездочки 27, обеспечивающей движение комбайна относительно рейки 28, связанной со ставом 3.
Тележка 6 состоит из корпуса 29 коробчатой формы с дверкой на торце корпуса, прозрачного колпака 3 с форточками 31 с завальной и забойной стороны, поворотного кресла 32, поворотного рычага 33 соединения тележки с верхней или нижней ветвью кольцевой цепи 6, манипулятора 34 для взятия пробы из почвы или кровли, включающего гидроотбойное долото 35 типа "ложки", питающееся по двум рукавам (напор и слив эмульсии), проложенным по плечу 36, предплечья 37 и через пульт 38 от пульта 39 секции крепи, в котором имеется гнездо для быстрого подключения специального наконечника шланга (пистолета). Манипулятор 34 может занимать три положения: транспортное 40, у почвы 41 и у кровли 42, в зависимости от команды оператора и после прохода комбайна. Кроме того, на тележке имеется вентилятор, работающий от аккумулятора энергии (электрического от шахтного фонаря типа 43, или гидравлического, заряжаемого от пульта секции 38) и обеспечивающий всас и очистку от пыли наружного воздуха и создание в кабине подпора по сравнению с наружным воздухом.
Гидрооборудование 10 комплекса состоит из насосной группы, расположенной на штреке, центрального гидропульта на штреке (на чертеже не показаны), гидромагистралей 11 напора, слива для местного управления стойками и домкратами и питания тележки через пистолет оператора, подключаемых к пульту крепи, гидромагистралей для дистанционного управления подачей става и групповой выдвижки крепи, гидрорукавных ответвлений 44 между ставом с магистралями и пультами 39 и секциями крепи, компенсирующих относительные перемещения секций и става.
Устройство работает следующим образом. Комбайн движется по ставу, снимая ленту угля, и грузит его на конвейер. Вслед за комбайном вновь обнаженная поверхность кровли подхватывается перекрытиями крепи или выдвижными частями этих перекрытий.
При этом высота подрубки почвы нижним шнеком или кровли верхним шнеком должна меняться в зависимости от гипсометрии залегания пласта, а выдвижка перекрытий должна производиться сразу же после прохода верхнего шнека комбайна. С этой целью оператор комплекса располагается в зоне наибольшей видимости этих процессов в кабине тележки и перемещается синхронно относительно комбайна, но с периодическими остановками на время выдвижки очередной секции крепи или ее выдвижного перекрытия. Управление скоростью движения и временем остановок производится с ручным включением и отключением механизма передвижения тележки с помощью поворотного рычага 33, имеющего разнесенные по длине лавы языки 45, входящие в нижние пазы трубчатых направляющих 7 для сцепления либо с верхней, либо с нижней цепью 8. Положение указанных пазов снизу трубы диктуется необходимостью очистки цепи от штыба.
В нейтральном положении рычага 33 тележка свободна от внешнего привода и машинист может соединить тележку с комбайном в соответствующем положении, когда против форточки кабины 31, обращенной к забою, расположится пульт управления комбайном 26. В таком положении оператор управляет перестановкой высоты верхнего или нижнего шнека или характером движения комбайна.
Для уточнения гипсометрии пласта и положения границы уголь-порода оператор отъезжает от комбайна в зону выдвижки секции крепи, останавливаясь перед пультом 39 секции крепи, вставляет в гнездо пульта пистолет шланга манипулятора 34 и, пользуясь пультом 38 манипулятора, переводит его из позиции 40 в позицию 41 (для замера на почве) или в позицию 42 (для кровли), включает в работу гидроударный механизм с долотом типа "ложка", которая как забиваемая свая внедряется в почву, захватывая ее керн внутрь, затем оператор возвращает манипулятор в исходное положение, вынимая из раскрываемой "ложки", через соответствующую форточку керн.
Манипулируя рукояткой пульта 39 секции крепи, оператор выдвигает секцию или выдвижной козырек перекрытия и подхватывает свежеобнаженную кровлю.
Имеется вариант устройства, когда рычаг 33 используется для остановки тележки у пульта 39 при наличии связи с комбайном, выполненной телескопической и играющей роль движителя тележки и пульта управления комбайном.
После снятия комбайном всей полосы производится дистанционно фронтальная передвижка става на забой путем подачи давления в магистраль "П" (подачи) 11. При этом оператор находится на конце лавы, включая работу комбайна по торцевой зарубке обоих шнеков в забой, причем включение центрального пульта управления для подачи става может быть выполнено, совмещая крайний пульт 39 секции крепи по данной операции с центральным пультом.
С этим же пультом может быть совмещено управление выдвижки групп секций крепи для случая, когда при выемке угля выдвигались только выдвижные части перекрытий.
Преимуществом последней схемы является то обстоятельство, что выдвижные части перекрытий могут быть армированы скалывателями для осуществления полной затяжки кровли вплотную к забою, и в этом случае визуальный контроль за работой скалывателей является единственно возможным, что является существенным преимуществом предлагаемого способа и устройства.
В результате осуществления предложенного способа и устройства для его осуществления достигается обеспечение комфортности и механизации управления очистными машинами, достижение санитарно допустимых норм по запыленности вдыхаемого воздуха, достигается резкое увеличение нагрузки на очистной забой, снижение численности рабочих очистного забоя. Одновременно повышается надежность магистральной гидроразводки, выполняемой из жестких гидромагистралей, упрощение остальной гидроразводки и улучшается организация труда, функция управления которым заменяется управлением всеми механизмами практически одним человеком.
В случая применения варианта устройства с постоянной привязкой тележки к комбайну достигается упрощение конструкции /отсутствие кольцевой цепи движителя и операции подключения гидро- и электроэнергии/, однако за счет снижения маневренности оператора и необходимости останавливать комбайн для получения проб почвы и кровли в выработанной зоне.
Перечень литературы, принятой во внимание.
1. Развитие техники для подземной добычи угля, калийных и марганцевых руд. -М.: Недра, 1985, с. 145, рис. 55.
2. Там же, с. 156, рис. 61.
3. Там же, с. 167, рис. 65.
4. Медведев Ю. Робот спускается под землю. Техника молодежи. -1982, N 8, с. 30-35 .
Изобретение относится к горному делу и может использоваться для подземной выемки угля с применением очистных комбайнов и гидрофицированных крепей. Оно обеспечивает присутствие человека в зоне работы комбайна и крепи с обеспечением санитарных норм по запыленности атмосферы и комфортных условий труда оператора. Способ управления комплексом, состоящим из очистного комбайна и секций механизированной крепи с пультами местного управления, осуществляет управление комбайном при движении оператора в тележке вблизи и синхронно с движением комбайна на расстоянии протянутой руки. Контроль пачки угля в кровле и почве производят с тележки этим же оператором периодическим взятием пробы из кровли и почвы механизмом тележки, работающим за счет гидроэнергии, получаемой от гидропультов крепи или от комбайна. Устройство для управления состоит из тележки для оператора, направляющих для тележки, двигателя тележки. Тележка и направляющие расположены на ставе перед забойными стойками крепи. Направляющие выполнены в виде двух труб с пазами внизу и кольцевой цепью внутри, взаимодействующей с языками тележки, полость которой герметизирована прозрачным куполом с форточками для рук оператора. Тележка имеет манипулятор с гидроотборной ложкой для взятия проб, вентилятор с пылегасителем, пистолет для подключения к гидроэнергии. Ее двигатель выполнен в виде постоянной телескопической связи с комбайном с ходом не менее шага крепи и размещением внутри связи телескопической гидро- и электропроводки для питания манипулятора и вентилятора тележки. 3 с.п.ф-лы, 1 ил.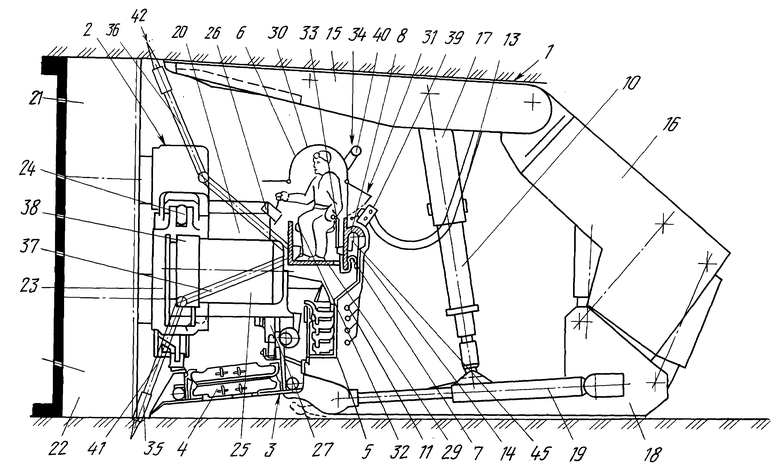
| Медведев Ю | |||
| Робот спускается под землю | |||
| Техника молодежи | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 0 |
|
SU390283A1 |
| Устройство для передвижки шахтной механизированной крепи | 1973 |
|
SU443995A1 |
| Механизированная крепь для крутых пластов | 1977 |
|
SU613120A1 |
| Способ передвижения секций механизированной крепи и устройство для его осуществления | 1978 |
|
SU750097A1 |
| Механизированная крепь | 1980 |
|
SU964173A1 |
| 0 |
|
SU398754A1 | |
