Техническое решение относится к подъемно-транспортным механизмам и предназначено для фиксации параметров грузоподъемных механизмов и защиты их от перегрузки.
Известен способ ограничения грузоподъемности стрелового крана [1], основанный на измерении сигналов, пропорциональных длине и углу наклона стрелы, а также усилию в гидроцилиндре и углу его наклона, вычисляют sin и cos этих сигналов, результат суммируют, делят, умножают и сравнивают с номинальным значением сигнала, пропорциональным нагрузке для данной длины и угла наклона стрелы. При превышении сигналом номинального значения нагрузки происходит коммутация цепи управления краном.
Известен ограничитель грузоподъемности стрелового крана [1], содержащий датчики длины и угла наклона стрелы, подключенные первый непосредственно, а второй через блок вычисления косинуса к входам блока умножения, выход которого связан с входом сумматора, датчики усилия и угла наклона гидроцилиндра наклона стрелы, блок деления и блок компараторов, выход которого включен в цепь управления краном, кроме того, он дополнительно снабжен блоками умножения и сумматором, входы которого соединены с датчиком угла наклона стрелы и гидроцилиндра, блоками вычисления синуса, входы которых подключены соответственно к датчику угла наклона стрелы и выходу второго сумматора, а выходы - к второму входу первого сумматора и входу второго блока умножения, второй вход которого соединен с датчиком усилия, а выход подключен к входу блока деления, второй вход которого подсоединен к выходу первого сумматора, а выход через 3-ий блок умножения подключен к входу блока коммутаторов, причем входы 4-го блока умножения соединены с выходом 1-го блока умножения, а выход - с вторым входом 3-го блока умножения, входы 5-го блока умножения подключены соответственно к датчику длины стрелы и выходу блока деления, а выход - к второму входу блока компараторов.
Наиболее близким по технической сущности к заявленному способу является осуществляющий управление грузоподъемными механизмами способ ограничения грузоподъемности стрелового крана [2], основанный на выдаче аналоговых сигналов, зависящих от нагрузки, их преобразования в цифровой вид, обработке этих сигналов и дискретных параметров и сигналов, совместно с предварительно запомненными сигналами, координируя при этом эту обработку сформированной импульсной последовательностью сигналов. Информация перерабатывается в значения, отражающие работу крана, и в случае превышения допустимых значений нагрузки вырабатывается команда "Перегрузка". Величина времени, в течение которого непрерывно должна вырабатываться команда "Перегрузка", определяется динамикой работы крана.
Наиболее близким по технической сущности и достигаемому результату является осуществляющий управление грузоподъемными механизмами электронный ограничитель грузоподъемности крана, содержащий выполненный с входом прерывания цифровой вычислительный блок, один из информационных входов которого соединен с выходом аналого-цифрового преобразователя, второй двунаправленный - с входом и выходом цифрового запоминающего блока, а информационный выход соединен с входами синтезатора звука, и блока визуальной индикации, n датчиков аналоговых параметров крана, подключенных к входам аналого- цифрового преобразователя, m датчиков дискретных параметров и сигналов о работе крана, соединенных с третьими информационными входами цифрового вычислительного блока, а также таймер, подключенный выходом к входу прерывания цифрового вычислительного блока и цифровой управляемый фильтр, вход управления которого подключен к упомянутому выходу таймера, информационный вход - к упомянутому информационному выходу цифрового вычислительного блока, а вход - к исполнительному блоку [3].
Недостатками известных устройств являются эксплуатационная ненадежность, неполный объем регистрируемых параметров, невозможность использования ограничителя грузоподъемности без доработки для различных типов кранов.
Целью изобретения является расширение функциональных возможностей способа управления грузоподъемными механизмами с фиксацией их, характеристик, касающихся нагрузки, геометрии крана и режима его работы и устройства для его осуществления. В состав регистрируемых параметров входят: превышение скорости передвижения крана с фиксацией времени (даты) события, превышение грузовых характеристик при его работе с фиксацией времени (даты) и величины превышения, учет ресурса работы крана под нагрузкой. Кроме того, объем и состав регистрируемых параметров при необходимости может изменяться. Предлагаемое устройство может быть использовано в различных типах грузоподъемных механизмов.
Поставленная цель достигается тем, что в способе управления грузоподъемными механизмами с фиксацией их, характеристик, касающихся нагрузки, геометрии крана и режима его работы, основанном на измерении сигналов, пропорциональных этим характеристикам, первичной обработке указанных сигналов, преобразованных в цифровую форму, в соответствии с предварительно запомненными сигналами, определяющими порядок обработки, координации этой обработки сформированной импульсной последовательностью в реальном масштабе времени, их индикации и в случае превышения ими допустимых значений формировании управляющих сигналов и подаче последних на исполнительное устройство задают временной интервал, а о действительно имеющем место превышении сигналов, пропорциональных характеристикам подъемных механизмов над допустимым значением, судят в случае появления прошедших первичную обработку сигналов, превысивших установленный пороговый уровень в указанном временном интервале, при этом записывают в долговременную энергонезависимую память для хранения в неизменном виде прошедшие первичную обработку сигналы, пропорциональные указанным характеристикам, для учета ресурса работы крана под нагрузкой, время появления указанных сигналов, превысивших допустимый установленный уровень, величину и сформированные управляющие сигналы с возможностью считывания в случае необходимости. А в устройстве для управления грузоподъемными механизмами с фиксацией их, характеристик, касающихся нагрузки, геометрии крана и режима его работы, содержащем выполненный с входом прерывания цифровой вычислительный блок, один из информационных входов которого соединен с выходом аналого-цифрового преобразователя, другой - двунаправленный - с входом и выходом цифрового запоминающего блока, а информационный выход соединен с входом синтезатора звука и блоком визуальной индикации, n датчиков аналоговых параметров крана, подключенных к входам аналого-цифрового преобразователя, m датчиков дискретных параметров и сигналов о работе крана, соединенных с третьими информационными входами цифрового вычислительного блока, таймер, подключенный выходом к входу прерывания цифрового вычислительного блока и цифровой управляемый фильтр, вход управления которого подключен к упомянутому выходу таймера, информационный вход - к упомянутому информационному выходу цифрового вычислительного блока, а выход - к исполнительному блоку, таймер включает в себя формирователь отметок реального времени, выходом которого образован второй выход таймера, подключенный к второму входу цифрового запоминающего блока, а выход цифрового управляемого фильтра соединен с третьим входом цифрового запоминающего блока, снабженного блоком долговременной энергонезависимой памяти с входами, которыми образованы упомянутые второй и третий входы цифрового запоминающего блока, и входом, предназначенными для занесения обработанных в цифровом вычислительном блоке сигналов, пропорциональных характеристикам грузоподъемных механизмов, и регистрируемых параметров, причем цифровой запоминающий блок имеет двунаправленный вход-выход для считывания-записи информации посредством контроллера памяти, а цифровой вычислительный блок выполнен с дополнительным двунаправленным входом-выходом с возможностью считывания результатов промежуточных вычислений.
Таймер может быть выполнен на микросхеме RTC-63421А, цифровое вычислительное устройство - на микросхеме H1013BM1, аналого-цифровой преобразователь - на микросхеме AD78581LAR, цифровой запоминающий блок - на микросхемах AT29C020 и 537PY10, датчики дискретных параметров и сигналов 588BT1, 588BA1, датчики аналоговых параметров крана (датчики давления MА 2500, датчики наклона и длины стрелы СП4-8 и редуктор), синтезатор звука на микросхемах AD7945N, 174УН19 и TS-G1030, блок визуальной индикации-ИЖЦ21-4/7, исполнительный блок - РЭН34.
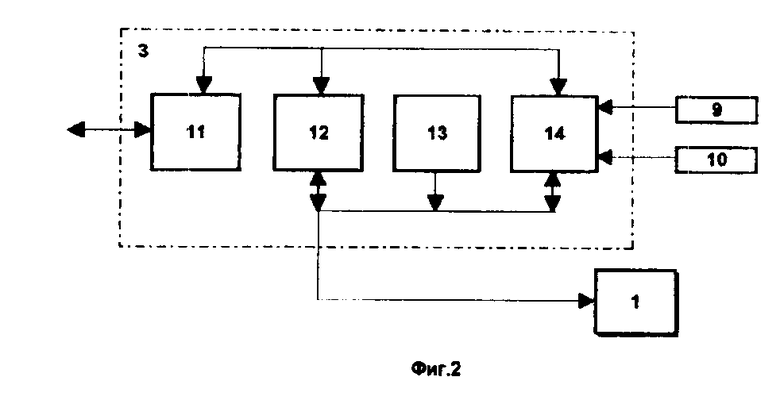
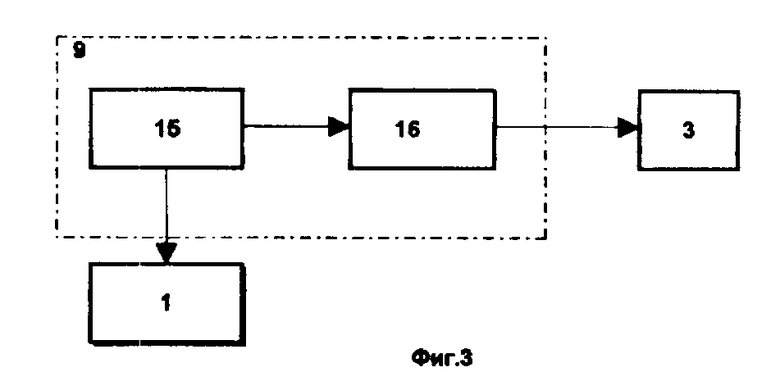
На фиг.1 представлена блок-схема ограничителя грузоподъемности стрелового крана; на фиг.2 - блок-схема запоминающего блока; на фиг.3 - блок-схема таймера.
Устройство управления и фиксации характеристик грузоподъемных механизмов содержит цифровой вычислительный блок 1, информационный вход которого соединен с выходом аналого-цифрового преобразователя 2, а второй двунаправленный информационный вход подключен к входу-выходу цифрового запоминающего блока 3, информационный выход цифрового вычислительного блока связан с входом синтезатора звука 4 и блоком 5 визуальной индикации, исполнительный блок 6 представляет собой устройство коммутации силовых цепей крана. Аналого-цифровой преобразователь 2 соединен с n датчиками 7 аналоговых параметров крана, а входы цифрового вычислительного блока 1 подключены к m датчикам дискретных параметров и сигналов о работе крана 8. Таймер 9, выход которого связан с m + 1 выходом цифрового вычислительного блока 1 и входом управляемого цифрового фильтра 10, соединен с выходом цифрового вычислительного блока 1, а выход подключен к исполнительному блоку 6.
Цифровой запоминающий блок 3 содержит подключенный своими входами к внутренней шине контроллер 11, выход которого является двунаправленным входом-выходом считывания-записи цифрового запоминающего блока, оперативное запоминающее устройство (ОЗУ) 12, постоянное запоминающее устройство (ПЗУ) 13, блок долговременной энергонезависимой памяти 14, второй вход которого подключен к таймеру, а третий - к цифровому управляемому фильтру, причем второй двунаправленный вход ОЗУ, выход ПЗУ и третий двунаправленный вход блока долговременной энергонезависимой памяти объединены и подключены к цифровому вычислительному блоку 1. Кроме того, таймер 9 состоит, например, из генератора 15 импульсной последовательности, соединенного с формирователем 16 отметок реального времена.
Датчики аналоговых параметров крана выдают сигналы, зависящие от нагрузки и геометрии крана, на аналого-цифровой преобразователь 2, цифровой вычислительный блок 1 управляет многоканальным аналого- цифровым преобразователем 2 так, что аналоговые измерительные сигналы последовательно преобразуются в цифровую форму и поступают в цифровой вычислительный блок 1, кроме того, цифровой вычислительный блок 1 производит опрос датчиков 8 на предмет получения дискретных параметров и сигналов, содержащих информацию о режиме работы крана. Цифровой вычислительный блок 1 перерабатывает эту информацию вместе с информацией, извлекаемой из ПЗУ 13 запоминающего блока 3. Таймер 9, выполненный, например, в виде генератора импульсной последовательности, координирует работу цифрового вычислительного блока 1.
Информация перерабатывается в параметры, отражающие работу крана, которые подводятся к блоку 5 визуальной индикации, а в зависимости от величины загрузки формируются предупреждения, подаваемые на синтезатор звука, и в случае превышения допустимых значений нагрузки вырабатывается команда "Перегрузка", которая поступает по информационному входу с цифрового вычислительного блока 1 на управляемый цифровой фильтр 10. Кроме того, на управляемый цифровой фильтр 10 поступает сигнал с таймера (импульсная последовательность сигнала). Цифровой управляемый фильтр формирует сигнал на исполнительное устройство и одновременно подает его на долговременную энергонезависимую память 14, на нее же поступает сигнал с формирователя отметок реального времени. Из цифрового вычислительного блока 1 обработанные сигналы, пропорциональные регистрируемым параметрам, заносятся в блок энергонезависимой памяти для дальнейшего считывания через контроллер памяти 11. Постоянное запоминающее устройство выдает команды в цифровой вычислительный блок 1 для управления обработкой сигналов в нем, а в оперативное запоминающее устройство 12 заносятся результаты промежуточных вычислений, которые могут быть считаны либо через контроллер памяти, либо обратно самим цифровым вычислительным блоком.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1991 |
|
RU2011632C1 |
| СПОСОБ ЗАЩИТЫ КОТЕЛЬНОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154233C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМИ МЕХАНИЗМАМИ | 2003 |
|
RU2260560C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2245837C1 |
| СПОСОБ ЗАЩИТЫ И РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2010 |
|
RU2442742C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2267457C2 |
| АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ КРАН | 1993 |
|
RU2034772C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СПОСОБ И УСТРОЙСТВО РЕГИСТРАЦИИ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2280609C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ СТАЦИОНАРНОГО БАШЕННОГО КРАНА | 2010 |
|
RU2426684C1 |
При превышении сигналами, пропорциональными характеристикам подъемных механизмов, порогового уровня в заданном временном интервале формируют управляющие сигналы, записывают сигналы и время их появления в долговременную энергонезависимую память. Устройство содержит цифровой независимый блок, цифровой запоминающий блок, датчики параметров, таймер, цифровой управляемый фильтр. За счет возможности хранения всех необходимых параметров грузоподъемных механизмов, регистрации времени возникновения критических ситуаций расширяются функциональные возможности. Устройство может быть адаптировано к различным грузоподъемным механизмам простой коррекцией программного обеспечения. 2 с.п. ф-лы, 3 ил.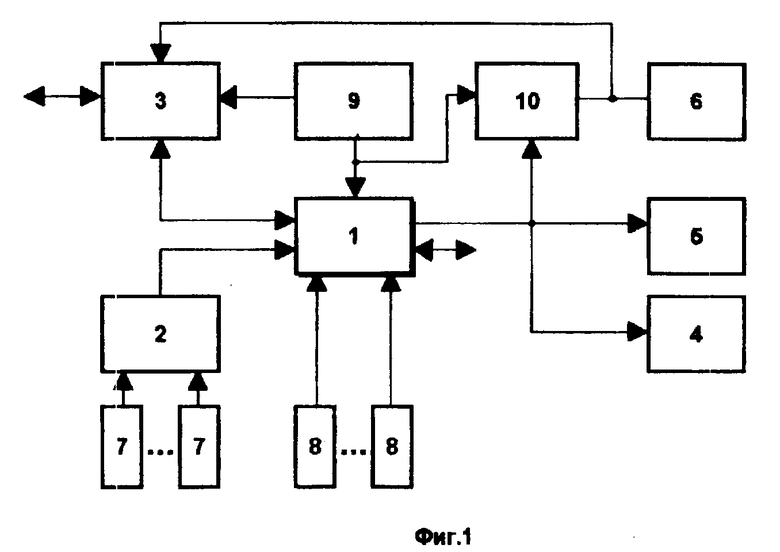
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство N 1337340 А, 15.09.87 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU, патент N 201 1632 С1, 30.04.94 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| DE, заявка N 3019385 А1, 27.11.80. | |||

