Изобретение относится к области машиностроения, а именно к производству кранов, и может быть использовано для контроля грузовой устойчивости стационарных грузоподъемных средств, преимущественно башенных кранов.
Известна система защиты грузоподъемного крана (патент RU 38747 U1, МКП7 B66C 23/90), содержащая цифровой вычислительный блок, внешнее запоминающее устройство, регистратор параметров крана с таймером реального времени, блок визуальной индикации, блок аварийной сигнализации, исполнительный блок, устройство ввода-вывода информации и периферийные устройства регистрации параметров крана, включающие m цифровых датчиков параметров крана и n аналоговых датчиков параметров крана с аналого-цифровыми преобразователями, информационные выходы цифрового вычислительного блока соединены с выходами периферийных устройств регистрации параметров крана, внешнее запоминающее устройство соединено с цифровым вычислительным блоком двухсторонним каналом обмена данных, к выходам цифрового вычислительного блока подключены исполнительный блок, блок визуальной индикации, блок аварийной сигнализации и регистратор параметров крана, а регистратор параметров крана дополнительно соединен с устройством ввода-вывода информации двухсторонним, мультиплексным каналом обмена данных.
Недостатком известной системы является то, что при возникновении ситуаций, связанных с превышением критических значений скоростей ветра, на блок визуальной индикации выводится соответствующая информация и включается аварийная сигнализация, но автоматическое регулирование устойчивости не осуществляется.
Наиболее близким является система защиты грузоподъемного крана от перегрузки и повреждения (патент RU 2316467 С1, МПК6 B66C 13/18, B66C 23/88, 10.08.2008), содержащая цифровой вычислитель, внешнее запоминающее устройство, исполнительный блок и датчики параметров крана. Цифровой вычислитель содержит блок расчета вылета стрелы, блок расчета нагрузки на грузозахватном органе, блок определения момента, три компаратора и элемент ИЛИ. К первому входу цифрового вычислителя подключены выходы датчиков параметров крана, ко второму входу - внешнее запоминающее устройство, а к первому и второму выходам - соответствующие входы исполнительного блока.
Недостатком известного способа является то, что в случае превышения критических значений параметров работы крана, система производит отключение тех механизмов, которые могут привести к росту нагрузки, без осуществления автоматической корректировки устойчивости.
Задачей изобретения является повышение уровня безопасности погрузочно-разгрузочных работ, выполняемых с привлечением стационарных башенных кранов, а так же обеспечение автоматического регулирования устойчивости в период действия сильных порывов ветра и предоставлении легко воспринимаемой информации оператору о текущей устойчивости системы в реальном масштабе времени.
Сущность изобретения заключается в периодическом непрерывном опросе крана, во время которого получают, регистрируют, запоминают сигналы, соответствующие значениям грузовой характеристики крана, характеристики геометрии крана, характеристики режима работы крана, скорости ветра, сравнивают полученные сигналы со значениями характеристик, введенными в систему управления краном перед началом его эксплуатации, сравнивают полученные при опросе сигналы с допустимыми значениями характеристик и при превышении их прекращают выполнение команд машиниста, дополнительно в периодическом непрерывном опросе крана получают значение крутящего момента на быстроходном валу редуктора поворота башни, направление ветра, положение стрелового устройства относительно ветрового потока и формируют сигнал, управляющий аппаратурой, обеспечивающей устойчивость крана.
Устройство для осуществления способа управления устойчивостью стационарного грузоподъемного крана, содержащее цифровой вычислитель, внешнее запоминающее устройство, исполнительный блок, датчик нагрузки, ограничитель динамического момента, датчик скорости ветра, датчик положения стрелы, цифровой вычислитель, первый выход которого соединен со входом исполнительного блока, второй выход цифрового вычислителя соединен со входом внешнего запоминающего устройства, выход которого соединен с первым входом цифрового вычислителя, второй вход цифрового вычислителя соединен с выходами датчика нагрузки и ограничителя динамического момента, так же дополнительно введены датчик крутящего момента, датчик направления ветра, контроллер с введенными алгоритмами управления на основе нечеткой логики, аппаратура управления устойчивостью и блок визуальной индикации, выходы датчика скорости ветра, датчика направления ветрового потока, датчика положения стрелы, датчика крутящего момента соединены с первым входом контроллера, первый выход которого соединен со входом аппаратуры управления устойчивостью, второй выход контроллера соединен с третьим входом цифрового вычислителя, третий выход которого соединен со входом блока визуальной индикации.
Сущность изобретения поясняется чертежом.
Вход один контроллера 1 соединен с выходами датчика скорости ветра 3, датчика направления ветрового потока 4, датчика положения стрелы 5, датчика крутящего момента 6 шиной данных. Данная группа датчиков задает параметры ветрового нагружения. В память контроллера 1 записана программа управления устойчивостью в рабочем и нерабочем состоянии крана на основе алгоритмов нечеткой логики с возможностью корректировки, перепрограммирования и внесения изменений. Выход два контроллера 1 соединен с входом три цифрового вычислителя 2 шиной данных, который содержит математическую модель параметров нагружения с заданными критическими значениями.
Выход один контроллера 1 соединен с входом аппаратуры управления устойчивостью 9 силовым кабелем, которая интегрирована в механизм поворота крана в разрыв между редуктором поворота и тормозным механизмом. Основной особенностью аппаратуры управления устойчивостью 9 является возможность изменения жесткости в кинематической схеме тормозной механизм - редуктор поворота крана. Выходы датчика нагрузки 7 и ограничителя динамического момента 8 подсоединены к второму входу цифрового вычислителя 2 шиной данных. Выход три цифрового вычислителя 2 соединен с входом блока визуальной индикации 10 шиной данных. Выход один цифрового вычислителя 2 соединен с входом исполнительного блока 11 шиной данных. Выход два цифрового вычислителя 2 соединен с входом внешнего запоминающего устройства 12, а выход внешнего запоминающего устройства 12 соединен со вторым входом цифрового вычислителя 2.
В рабочем состоянии крана принцип действия устройства следующий: в процессе выполнения перегрузочных работ сигналы с датчика нагрузки 7 и ограничителя динамического момента 8 поступают на вход два цифрового вычислителя 2, далее обрабатываются по средством вычисления математической модели с данными параметрами. Цифровой вычислитель 2 по результатам вычислений формирует сигнал, поступающий на выход внешнего запоминающего устройства 12, где производится регистрация, и на вход блока визуальной индикации 10 для вывода информации о состоянии грузового нагружения. В случае перегрузки цифровой вычислитель 2 формирует дополнительный сигнал на вход исполнительного блока 11, который производит отключение тех исполнительных механизмов в результате работы, которых произошла перегрузка. Так работает система контроля грузового нагружения.
Параллельно системе контроля грузового нагружения работает система контроля ветрового нагружения. Сигналы с датчика скорости ветра 3 по шине данных поступают на вход один контроллера 1. Программным обеспечением анализируется значение данного параметра и формируется сигнал на выход три цифрового вычислителя 2 о параметрах ветрового нагружения. Полученный сигнал цифровым вычислителем 2 с контроллера 1 передается на выход внешнего запоминающего устройства 12 для регистрации и на вход блока визуальной индикации 10 для отображения параметров ветрового нагружения.
При увеличении скорости ветра, т.е. приближении ветра к критическому значению, сигналы с датчика направления ветра 4 и датчика положения стрелы 5 поступают на вход один контроллера 1 и по разности показаний датчиков вычисляет угол атаки ветрового потока. Контроллер 1 используя программное обеспечение для рабочего состояния крана анализирует полученные данные и в случае допустимого значения запаса устойчивости формирует сигнал на вход один цифрового вычислителя 2. Цифровой вычислитель 2 направляет полученный сигнал на вход внешнего запоминающего устройства 12, которое производит регистрацию текущего значения скорости ветра и данных, полученных в результате анализа, и передает на вход блока визуальной индикации 10, который выводит соответствующую информацию.
Дальнейшее увеличение скорости ветра приводит к снижению запаса устойчивости, контроллер 1 с программным обеспечением, анализирующим полученные данные, дополнительно направляет сигнал на вход аппаратуры управления устойчивостью 9, которая производит изменение жесткости кинематической связи тормоз - редуктор поворота башни, тем самым обеспечивая возможность поворота стрелового устройства и изменение угла атаки ветрового потока. Другими словами при действии ветрового потока под определенным углом и определенной скоростью возникает опасность опрокидывания установки вследствие снижения коэффициента запаса устойчивости. Инициирование сигналов на аппаратуру управления устойчивостью позволяет изменить угол атаки на меньший в результате поворота стрелы под действием ветра, в зону с большим запасом устойчивости, тем самым происходит трансформация кинетической энергии ветрового потока в потенциальную энергию поворота крана.
В нерабочем состояния крана не осуществляется регистрация параметров ветрового нагружения и вывод информации на блок визуальной индикации.
Сигналы с датчика крутящего момента 7 поступают на вход два контроллера 1 по шине данных и при помощи программного обеспечения для нерабочего состояния крана производится оценка устойчивости. В случае допустимого значения крутящего момента система безопасности находится в покое. При превышении допустимого значения крутящего момента дополнительно поступают сигналы с датчика направления ветрового потока 4 и датчика положения стрелы 6 на вход два контроллера 1. Полученные данные анализируются программным обеспечением на основе алгоритмов нечеткой логики в контроллере 1 и в зависимости от степени приближения полученных данных к критическому значению устойчивости формируются исполнительные сигналы на вход аппаратуры управления устойчивостью 9. Тем самым происходит изменение жесткости кинематической связи тормоз - редуктор поворота и стреловое устройство перемещается под действием ветрового напора в зону с большим запасом устойчивости. Снижение величины крутящего момента позволяет увеличить жесткость кинематической связи тормоз - редуктор поворота башни при помощи сигналов управляющих аппаратурой 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ БАШЕННЫХ КРАНОВ ОТ ОПРОКИДЫВАНИЯ | 2012 |
|
RU2542850C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ БАШЕННЫХ КРАНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2525351C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2381171C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА С ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2333881C1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1992 |
|
RU2045468C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2006 |
|
RU2316467C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2006 |
|
RU2335451C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА С ПЕРЕМЕЩАЕМЫМ КРАНОВЫМ ОБОРУДОВАНИЕМ | 2007 |
|
RU2333882C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2267457C2 |
Изобретение относится к области машиностроения и может быть использовано для контроля грузовой устойчивости стационарных грузоподъемных средств, преимущественно башенных кранов. Устройство управления устойчивостью стационарного башенного крана содержит цифровой вычислитель, внешнее запоминающее устройство, исполнительный блок, датчик нагрузки, ограничитель динамического момента, датчик скорости ветра, датчик положения стрелы, цифровой вычислитель, датчик крутящего момента, датчик направления ветра, контроллер с введенными алгоритмами управления на основе нечеткой логики, аппаратура управления устойчивостью и блок визуальной индикации. Первый выход цифрового вычислителя соединен со входом исполнительного блока, второй выход цифрового вычислителя соединен со входом внешнего запоминающего устройства, выход которого соединен с первым входом цифрового вычислителя. Второй вход цифрового вычислителя соединен с выходами датчика нагрузки и ограничителя динамического момента. Выходы датчика скорости ветра, датчика направления ветрового потока, датчика положения стрелы, датчика крутящего момента соединены с первым входом контроллера, первый выход которого соединен со входом аппаратуры управления устойчивостью. Второй выход контроллера соединен с третьим входом цифрового вычислителя, третий выход которого соединен со входом блока визуальной индикации. Достигается повышение производительности и уровня безопасности погрузочно-разгрузочных работ. 1 ил.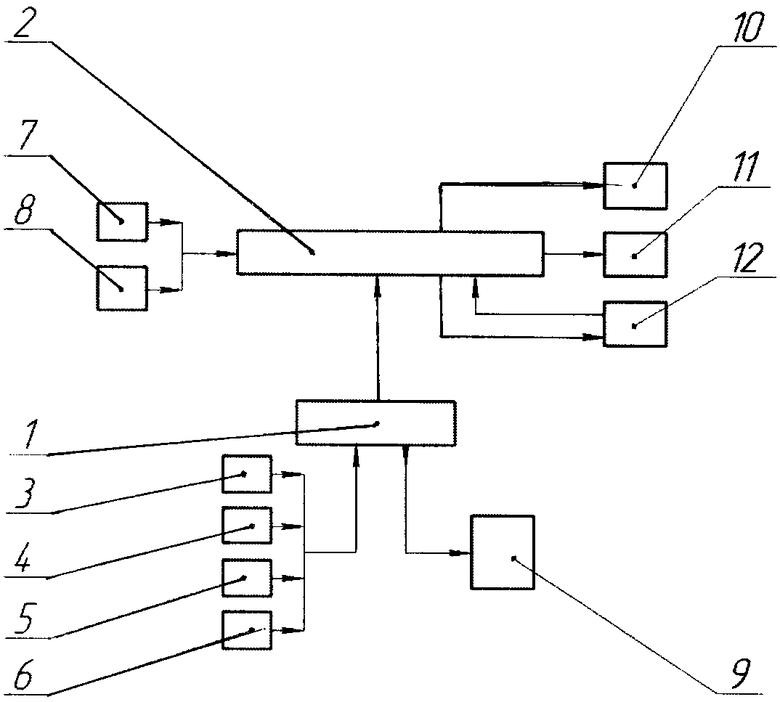
Устройство управления устойчивостью стационарного грузоподъемного крана, содержащее цифровой вычислитель, внешнее запоминающее устройство, исполнительный блок, датчик нагрузки, ограничитель динамического момента, датчик скорости ветра, датчик положения стрелы, цифровой вычислитель, первый выход которого соединен со входом исполнительного блока, второй выход цифрового вычислителя соединен со входом внешнего запоминающего устройства, выход которого соединен с первым входом цифрового вычислителя, второй вход цифрового вычислителя соединен с выходами датчика нагрузки и ограничителя динамического момента, отличающееся тем, что дополнительно введены датчик крутящего момента, датчик направления ветра, контроллер с введенными алгоритмами управления на основе нечеткой логики, аппаратура управления устойчивостью и блок визуальной индикации, выходы датчика скорости ветра, датчика направления ветрового потока, датчика положения стрелы, датчика крутящего момента соединены с первым входом контроллера, первый выход которого соединен со входом аппаратуры управления устойчивостью, второй выход контроллера соединен с третьим входом цифрового вычислителя, третий выход которого соединен со входом блока визуальной индикации.
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ БАШЕННЫМ КРАНОМ | 2006 |
|
RU2319657C2 |
| CN 101585487 A, 25.11.2009 | |||
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2006 |
|
RU2316467C1 |

