Настоящее изобретение относится к способу определения ориентации сейсмоприемника, в частности к способу определения курса (т.е. ориентации в горизонтальной плоскости) многокомпонентного сейсмического приемника. Изобретение можно применять, например, к приемнику, расположенному на поверхности земли, к приемнику, буксируемому по воде, или к приемнику, расположенному в буровой скважине. Используемый здесь термин «поверхность земли» включает в себя морское дно, сушу и переходную зону. Изобретение относится также к сейсмоприемнику и к способу сейсморазведки с использованием сейсмоприемника.
Сейсмоприемник обычно содержит один или несколько сейсмочувствительных элементов, размещенных в корпусе. При развертывании приемника в заданном месте разведки путем размещения его на поверхности земли соединение сейсмочувствительного(ых) элемента(ов) с землей обеспечивается посредством корпуса приемника; корпус также обеспечивает физическую защиту чувствительного(ых) элемента(ов). Приемники этого общего типа обычно используются путем присоединения корпуса приемника к несущему кабелю с интервалами вдоль кабеля. Несущий кабель снабжен электрическими проводами, позволяющими передавать выходные сигналы приемников на оборудование слежения и/или регистрации и позволяющими подавать питание на приемники. В случае наземной разведки кабель размещают на земле таким образом, чтобы приемники занимали требуемые положения. В случае донной разведки кабель опускают на морское дно, развертывая приемники в требуемых местах на морском дне. Альтернативно, в случае буксируемого массива морских приемников кабель подвешивают на требуемой глубине под поверхностью воды и буксируют по воде, например, с помощью разведочного судна. В качестве дополнительной альтернативы, кабель можно развертывать в буровой скважине для обеспечения массива приемников ВСП (вертикального сейсмического профиля). Приемники также можно развертывать, не присоединяя их к кабелю. Например, автономные датчики могут регистрировать и сохранять данные локально, например, на жестком диске для последующего извлечения или могут передавать данные, например, по радио в другое место для последующей регистрации.
Сейсмоприемник, снабженный двумя или более сейсмочувствительными элементами, способен измерять два или более параметров принятой сейсмической энергии, и поэтому его называют многокомпонентным сейсмоприемником. В частности, многокомпонентные сейсмоприемники используются в качестве донных сейсмоприемников, т.е. приемников, размещаемых на морском дне. Донные сейсмоприемники обычно регистрируют давление и поле упругой волны сейсмической энергии, падающей на приемник. Давление является скалярной величиной, тогда как поле упругой волны является векторной величиной, вследствие чего составляющие поля упругой волны необходимо измерять в трех некомпланарных направлениях. Для этого используют трехкомпонентный геофон, способный измерять составляющие волнового поля в трех некомпланарных направлениях. Эти направления обычно выбирают как направление «х», направление «y» и направление «z» (вертикаль). Поэтому, в общем случае, измеряют четыре составляющие сейсмических данных. Регистрация четырехкомпонентных сейсмических данных на морском дне признана весьма успешным методом построения изображения через газонасыщенные отложения и для характеризации залежей углеводородов путем идентификации литологии и селекции флюидов. Многокомпонентные данные, описывающие поле упругой волны, особенно полезны, поскольку они позволяют отличать продольные волны сжатия (Р-волны) от поперечных волн сдвига (S-волны).
В традиционной донной системе регистрации приемники жестко прикреплены к кабелю, так что ориентация каждого приемника относительно кабеля известна. Обычно, каждый приемник выравнивают на кабеле, чтобы один чувствительный элемент регистрировал составляющую поля упругой волны вдоль кабеля (это также называют продольным направлением и обычно обозначают как направление «х»), а другой регистрировал составляющую поля упругой волны поперек кабеля (это также называют поперечным направлением, и обычно обозначают как направление «y»). Третий чувствительный элемент регистрирует вертикальную составляющую волнового поля.
В традиционном массиве приемников ориентацию каждого приемника на кабеле задают, присоединяя приемник к кабелю, так что курс приемника задан до развертывания кабеля. Таким образом, курс каждого приемника можно, в принципе, определять из его положения на кабеле. Однако при развертывании кабеля может происходить скручивание и сматывание несущего кабеля, и это значит, что фактический курс приемника может отличаться от расчетного курса, определенного из положения приемника на кабеле. Поэтому разрабатываются новые донные системы регистрации, в которых приемники отсоединены от кабеля. В указанных новых системах регистрации, хотя каждый приемник по-прежнему измеряет составляющие волнового поля по своим внутренним осям х и y, информация о положении приемника на кабеле не нужна для определения ориентации осей х и y приемника. Таким образом, определение курса приемника на основании его расположения на кабеле может быть неточным, что может оказывать негативное влияние на качество результатов обработки данных.
В случае автономного приемника определить курс приемника исключительно из положения приемника невозможно.
Первый аспект настоящего изобретения предусматривает способ определения ориентации сейсмоприемника, способ содержит этапы, на которых: осуществляют сбор сейсмических или акустических данных на приемнике, причем данные включают в себя, по меньшей мере, одну из величин, а именно давление и смещение частиц или производную по времени от смещения частиц; и определяют ориентацию приемника на основании, по меньшей мере, одной из указанных величин, а именно давления, измеренного на приемнике, и смещения частиц или производной по времени от смещения частиц, измеренного(ой) на приемнике.
Таким образом, настоящее изобретение позволяет исключить необходимость оценивания курса приемника на основании его местоположения на несущем кабеле. Вместо этого курс можно определять на основании сейсмических или акустических данных, полученных на приемнике, что позволяет более точно определять курс сейсмоприемника. Изобретение позволяет определять курс приемника даже в отсутствие какой-либо предварительной информации о курсе приемника и особенно полезно в случае использования в системе регистрации, в которой приемники отсоединены от несущего кабеля или в которой используются автономные приемники.
Определив курс приемника, можно использовать любой традиционный способ обработки сейсмических данных, полученных приемником. При обработке можно учитывать определенный курс приемника, тем самым повышая точность обработки данных.
Согласно способу, отвечающему изобретению, курс приемника определяют на основании, по меньшей мере, одной из величин, а именно давления, измеренного на приемнике, и смещения частиц или его производной по времени, измеренного(ой) на приемнике. Наиболее удобные для использования производные по времени от смещения частиц - это скорость частиц (т.е. первая производная по времени) и ускорение частиц (т.е. вторая производная по времени), но, в принципе, можно использовать производные по времени более высокого порядка.
Согласно предпочтительному варианту осуществления для определения ориентации приемника используют пространственные производные в первом и втором разных горизонтальных направлениях от давления, измеренного на приемнике. Для определения ориентации приемника можно также использовать составляющие смещения частиц или скорости частиц, измеренные на приемнике, в первом и втором горизонтальных направлениях. Вместо пространственных производных от давления можно использовать пространственные производные в первом и втором горизонтальных направлениях смещения частиц, измеренные на приемнике.
Точная регистрация давления и поля упругой волны важна для полного и точного анализа сейсмических данных, полученных при многокомпонентной донной сейсморазведке. Методы векторной обработки, например схемы расщепления волнового поля, можно успешно применять для анализа собранных сейсмических данных только, если они обеспечивают хорошее векторное представление волнового поля. На практике, изменения в подключении геофонов и гидрофонов, резонансы в кабеле приемника и неточная ориентация приемников могут отрицательно влиять на измерения.
Одна частная проблема, возникающая при обработке данных, собранных многокомпонентным сейсмодатчиком, состоит в векторной погрешности. «Векторная погрешность» означает, что одна или более составляющих зарегистрированного волнового поля искажена(ы) по сравнению с истинным движением частиц. Такие искажения могут быть обусловлены не вполне оптимальной конструкцией корпуса датчика или кабеля, что может особенно неблагоприятно сказываться на конкретных составляющих регистрируемых данных. В частности, погрешность между составляющими поля упругой волны в продольном (х) направлении и поперечном (y) направлении может представлять собой серьезную проблему.
Были предложены различные методы корректировки векторной погрешности. Например, Гейзером (J.E.Gaiser) в "Compensating OBC data for variations in geophone coupling" («Компенсация данных ОДК для изменений в подключении геофонов»), 68-я ежегодная международная конференция, Soc. Expl. Geophys., стр.1429-1432 (1998) и Багаини (C.Bagaini) и др. в "Assessment and calibration of horizontal geophone fidelity in seabed-4C using shear waves" («Оценка и калибровка горизонтальной точности геофонов в 4-компонентном донном сейсмоприемнике с использованием поперечных волн»), 62-я конференция EAGE, Глазго, развернутые рефераты, статья L02 (2000), были предложены методы калибровки измерений разных составляющих волнового поля для корректировки векторной погрешности. В основе этих методов лежит минимизация трансверсальной энергии с учетом распространения всей энергии в радиально-вертикальной плоскости. Однако в обеих схемах радиальное направление задано как направление от источника к приемнику, что неявно предполагает поперечную инвариантность земли. Эта гипотеза означает, что наличие любых подповерхностных структур приводит к систематическим неопределенностям в калибровочных фильтрах, на что указывает (выше) Гейзер.
Ошибки в калибровочных фильтрах до сих пор минимизировали статистически, но минимизацию можно осуществлять только, если собранные данные имеют хороший сектор обзора по азимуту. Однако настоящее изобретение обеспечивает возможность осуществлять точную калибровку приемника, не опираясь на одномерную модель земли, для любого количества съемок с произвольным сектором обзора по азимуту.
Второй аспект настоящего изобретения обеспечивает сейсмоприемник, содержащий три или более элементов, чувствительных к давлению, причем местоположения элементов, чувствительных к давлению, не являются коллинеарными. Такой приемник может выдавать информацию о пространственных производных давления, и эту информацию можно использовать при определении курса приемника. Сейсмические данные, собранные приемником согласно второму аспекту настоящего изобретения, можно обрабатывать способом согласно первому аспекту изобретения для определения ориентации приемника.
Третий аспект настоящего изобретения предусматривает способ сейсморазведки, содержащий этапы, на которых: излучают сейсмическую энергию в первом местоположении; и осуществляют сбор сейсмических данных на сейсмическом приемнике вышеуказанного типа во втором местоположении, отличном от первого местоположения.
Некоторые или все сейсмические данные, собранные способом сейсморазведки, согласно третьему аспекту изобретения, можно обрабатывать способом согласно первому аспекту изобретения, для определения ориентации, в частности курс приемника, используемого для сбора данных. При последующей обработке собранных сейсмических данных можно учитывать определенный курс приемника.
Другие предпочтительные признаки настоящего изобретения указаны в независимых пунктах формулы изобретения.
Предпочтительные варианты осуществления изобретения далее будут описаны на иллюстративном примере со ссылкой на прилагаемые фигуры.
На фиг.1 представлен схематический вид сверху первой морской сейсморазведочной системы, предназначенной для осуществления способа, согласно изобретению.
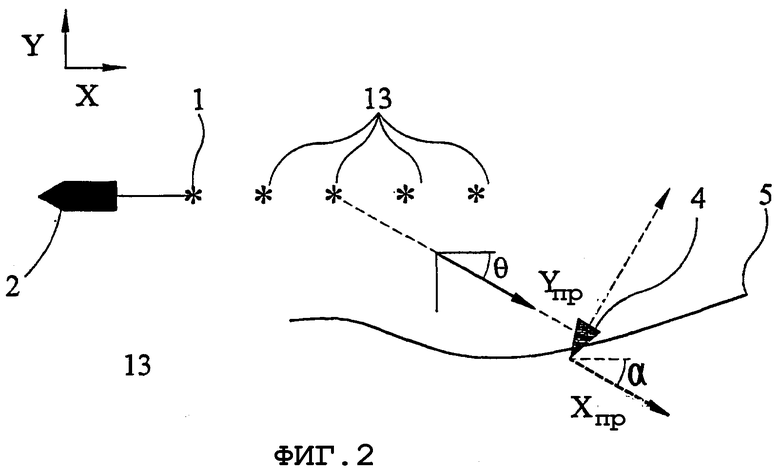
На фиг.2 представлен схематический вид сверху второй морской сейсморазведочной системы, предназначенной для осуществления способа, согласно изобретению.
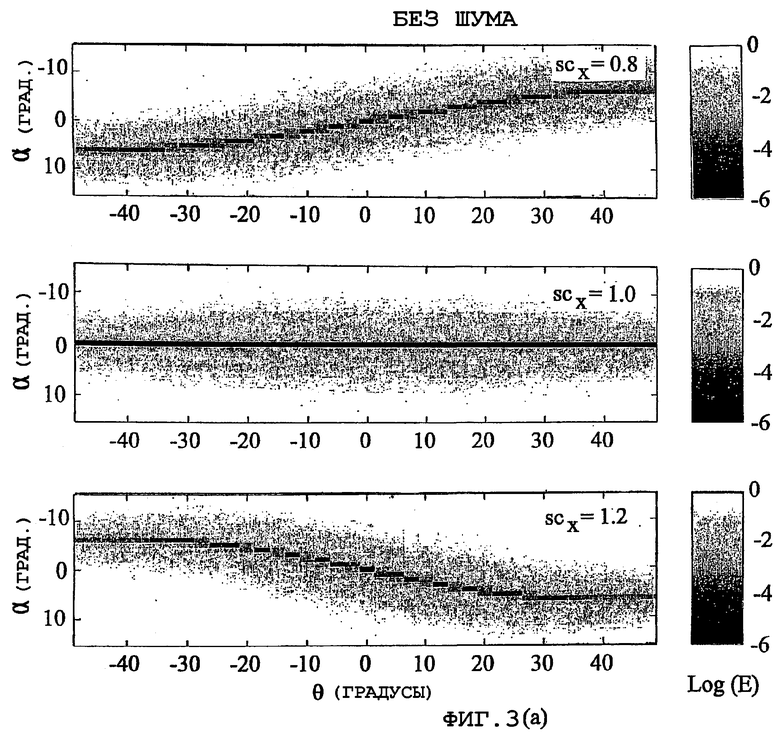
На фиг.3(а) изображен вид первой функции энергии, полученной для синтетических данных, свободных от шума.
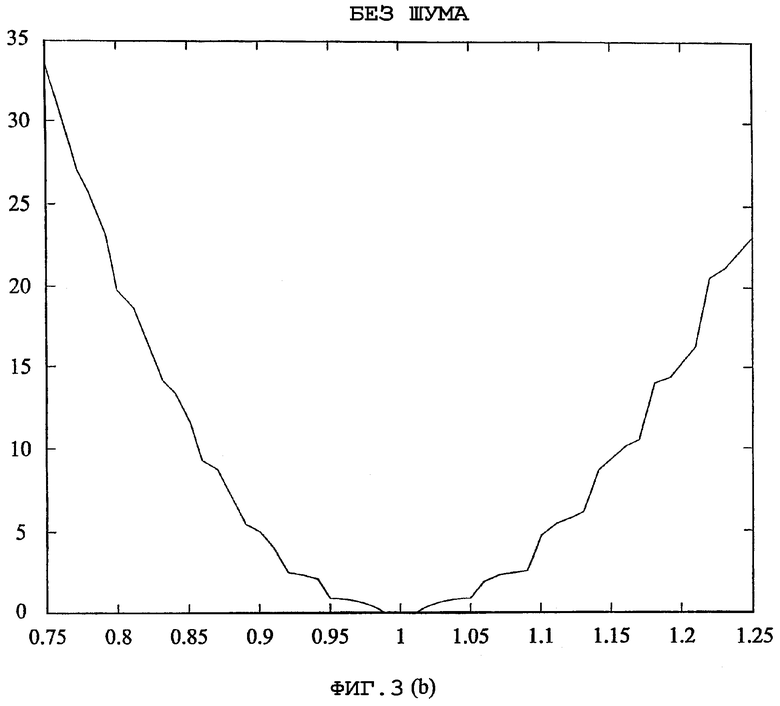
На фиг.3(b) изображен вид второй функции энергии для данных, представленных на фиг.3(а).
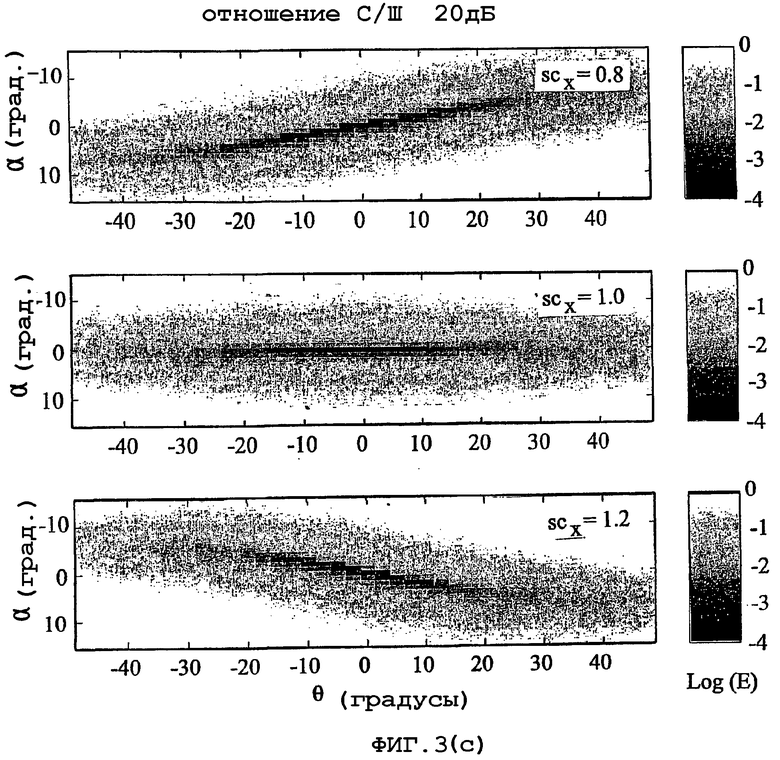
На фиг.3(с) изображен вид первой функции энергии, полученной для синтетических данных, имеющих отношение сигнал/шум 20 дБ.
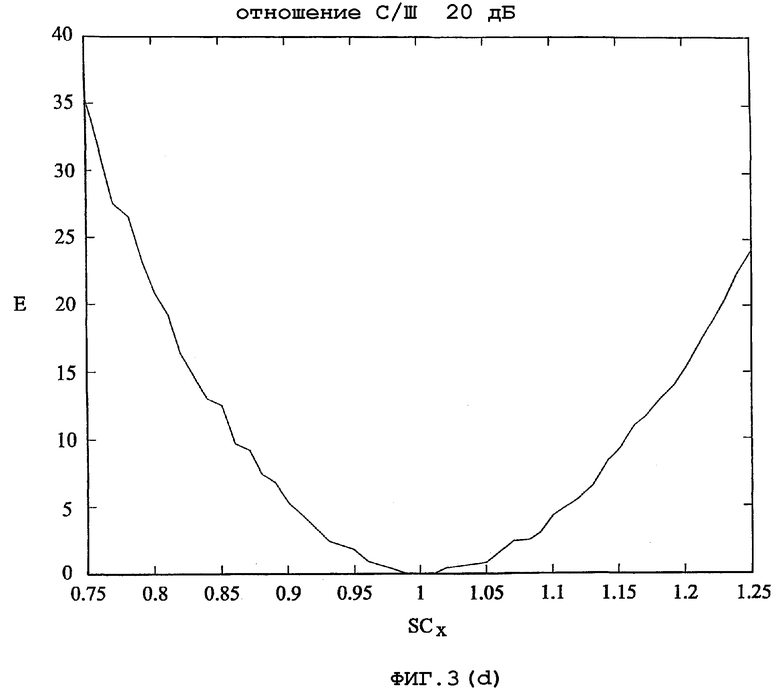
На фиг.3(d) изображен вид второй функции энергии для данных, представленных на фиг.3(с).
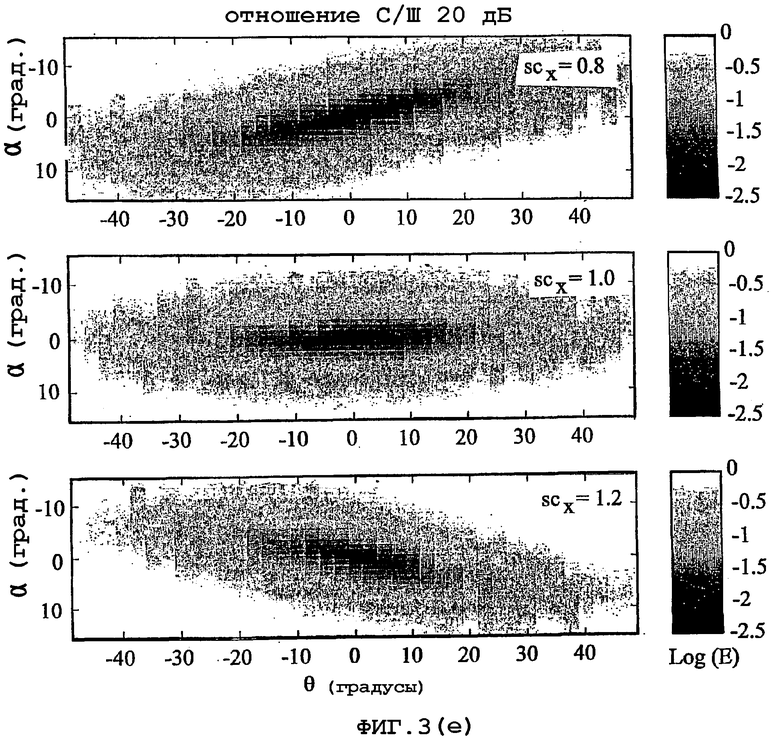
На фиг.3(е) изображен вид первой функции энергии, полученной для синтетических данных, имеющих отношение сигнал/шум 10 дБ.
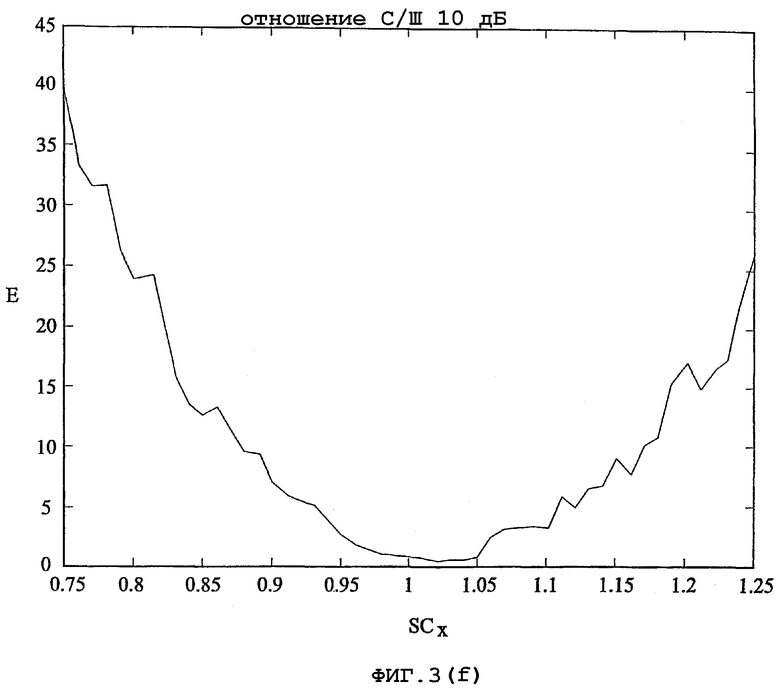
На фиг.3(f) изображен вид второй функции энергии для данных, представленных на фиг.3(е).
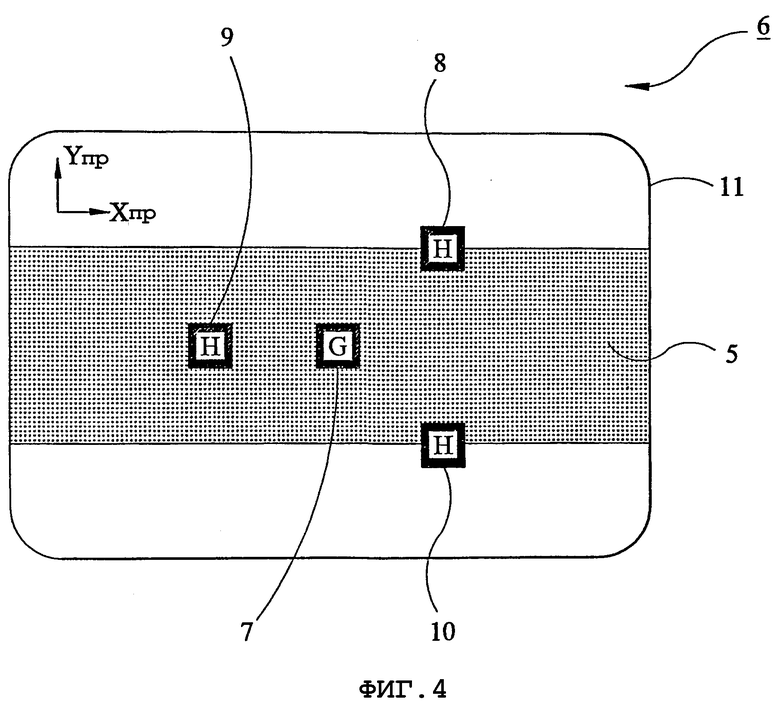
На фиг.4 представлена схема многокомпонентного сейсмоприемника согласно варианту осуществления настоящего изобретения.
Согласно способу, отвечающему настоящему изобретению, ориентацию приемника в горизонтальной плоскости (так называемый «курс приемника») определяют на основании сейсмических или акустических данных, полученных приемником. Информацию о, по меньшей мере, одной из величин, а именно давлении на приемнике и смещении частиц или его производной по времени на приемнике, получают на основании данных и на основании указанной информации определяют курс приемника. В предпочтительном варианте осуществления изобретения для определения курса приемника используют пространственные производные в двух разных горизонтальных направлениях от давления на приемнике. Указанные два направления предпочтительно перпендикулярны, и в нижеследующем описании варианта осуществления изобретения мы будем считать, что два направления перпендикулярны.
На фиг.1 показан схематический вид сверху морской сейсморазведочной системы. Сейсмический источник 1 буксируется разведочным судном 2. При буксировке сейсмического источника по воде его активируют для испускания импульса сейсмической энергии в каждой точке 3 съемки. Расстояние между последовательными точками 3 съемки равно произведению скорости судна 2 и интервала времени между последовательными активациями источника 1. Направление перемещения судна 2 задают как направление х.
Многокомпонентный сейсмоприемник 4, установленный на несущем кабеле 5, принимает сейсмическую энергию, испускаемую сейсмическим источником 1. Приемник 4 содержит чувствительные элементы для восприятия составляющих волнового поля в двух ортогональных горизонтальных направлениях. Эти направления являются внутренними осями х и y приемника и обозначаются как направления хпр и yпр соответственно. Приемник 4 содержит также элемент, чувствительный к давлению.
Ориентация внутренних осей х и y приемника относительно осей х и y, заданных направлением движения судна (далее обозначаемых «глобальная ось х» и «глобальная ось y»), неизвестна. Угол между осью х приемника хпр и глобальной осью х обозначим α.
Направление распространения, или азимут, падающей волны в горизонтальной плоскости можно получить из горизонтальных пространственных производных либо от давления Р, либо от смещения u. Угол между азимутом волны и положительным направлением глобальной оси х обозначен на фиг.1 как θ. Азимут можно определить из
В уравнении (1) обозначение ∂i означает дифференцирование по переменной 'i', и ui означает смещение (i=x, y или z).
Из фиг.1 следует, что азимут волны можно определить, в принципе, для пространственных производных либо от давления, либо от смещения, измеренных на приемнике 4. Однако давление, зарегистрированное на приемнике, не зависит от курса приемника, поскольку давление является скалярной величиной. Кроме того, измеренное давление, в общем, менее подвержено изменениям от приемника к приемнику в соединении между приемником и упругой средой (например, морским дном или землей) под приемником или вокруг него, чем измеренное смещение частиц. Поэтому в предпочтительных вариантах осуществления изобретения ориентацию приемника определяют из производных давления, а не из производных смещения.
В отсутствие сейсмической энергии, поляризованной вне горизонтальной плоскости (это может иметь место из-за энергии sh или расщепления поперечной волны), имеем

и, используя следующие выражения для составляющих обратной величины горизонтальной скорости, р, в направлениях х и y соответственно

можно связать горизонтальные пространственные производные давления с горизонтальными составляющими скорости частицы следующим образом:
Уравнение (4) позволяет определить курс датчика. Его можно переписать следующим образом:

Приемник 4 регистрирует составляющие скорости частицы по осям хпр и yпр, а также регистрирует давление. Кроме того, система сейсморазведки позволяет определить пространственные производные ∂хпрР и ∂упрР давления, что описано ниже. Если величину  вычисляют, она должна быть равна нулю, если оси х и y приемника выровнены с глобальными осями х и y, но будет отлична от нуля, оси х и y приемника не точно выровнены с глобальными осями х и y.
вычисляют, она должна быть равна нулю, если оси х и y приемника выровнены с глобальными осями х и y, но будет отлична от нуля, оси х и y приемника не точно выровнены с глобальными осями х и y.
Таким образом, для определения курса приемника вычисляют . Если величина равна нулю, значит, оси х и y приемника выровнены с глобальными осями х и y и угол α равен нулю. Если же первоначальное вычисление величины не дает нуля, это значит, что оси приемника не выровнены с глобальными осями х и y. В этом случае величину повторно вычисляют в новой системе координат хпр и yпр приемника, для которой угол α имеет некоторое ненулевое значение, и повторяют этот процесс до тех пор, пока не найдут значение угла α, которое дает значение величины , равное нулю или достаточно близкое к нулю.
Поскольку неизвестно, даст ли первоначальное вычисление положительное или отрицательное значение, для определения курса приемника предпочтительно найти значение угла α, которое минимизирует функцию стоимости или функцию энергии,  . Е1 не может быть отрицательной, и это упрощает итерационные методы определения угла α.
. Е1 не может быть отрицательной, и это упрощает итерационные методы определения угла α.
Определив значение угла α, можно вычислить пространственные производные давления по глобальным осям х и y на основании производных давления по осям х и y приемника. Затем с помощью уравнения (1) можно определить азимут θ волны.
Вышеописанный способ можно осуществлять с использованием любого пригодного метода вычислений.
Вышеописанный способ опирается на предположение о том, что приемник ориентирован так, что его ось z вертикальна. Во многих случаях это предположение справедливо, поскольку при развертывании кабеля ошибки в ориентации осей х и y приемника возникают с большей вероятностью, чем в ориентации оси z приемника. Кроме того, во многих современных сейсмоприемниках чувствительные элементы установлены на карданах, что гарантирует точную ориентацию оси z приемника. Если же известно или предполагается, что ось z приемника может отклоняться от вертикали, возможна предварительная обработка данных, зарегистрированных приемником, для коррекции неправильной ориентации оси z до применения способа, отвечающего изобретению, для определения курса датчика. Например, любую проекцию вертикальной составляющей на составляющие хпр и yпр данных, зарегистрированных приемником, можно удалить, осуществив калибровку зарегистрированных данных в соответствии с уравнением движения, используя метод, раскрытый K.M.Schalkwijk, C.P.A.Wapenaar и D.J.Verschuur в "Application of two-step decomposition to multi-component ocean-bottom data: Theory and case study", J. Seism. Expl., т.8, стр.261-278 (1999).
Как отмечено выше, при дифференцировании уравнения (4) мы предполагали отсутствие сейсмической энергии, поляризованной вне горизонтальной плоскости. Поэтому определение курса приемника предпочтительно осуществлять с использованием той части сейсмических данных, для которой это предположение имеет смысл, выбирая временной интервал сейсмических данных, в котором принятая сейсмическая энергия с большой вероятностью не содержит сейсмическую энергию, поляризованную вне горизонтальной плоскости. Для этого можно, например, выбрать временной интервал, содержащий прямую волну (волну, распространяющуюся прямо от источника 1 к приемнику 4). Если предположить, что морское дно, находящееся вблизи участка разведки, плоское и что азимутальная анизотропия отсутствует, то выбор временного интервала, содержащего множественные отражения от слоя воды (т.е. события, связанные с отражениями от поверхности моря и/или дна моря), также гарантирует, что данные, используемые при определении курса приемника, скорее всего, не содержат сейсмическую энергию, поляризованную вне горизонтальной плоскости.
Определив ориентацию приемника путем обработки выбранной части сейсмических данных, можно перейти к выполнению традиционных этапов обработки сейсмических данных. На этих последующих этапах обработки можно учитывать полученную ориентацию приемника. Последующие этапы обработки могут быть применены ко всем сейсмическим данным или к одной или нескольким частям сейсмических данных.
Согласно вышеприведенному описанию курс приемника определяют на основании сейсмических данных, полученных на приемнике. Изобретение не ограничивается определением курса приемника на основании сейсмических данных, и курс приемника можно также определять на основании акустических данных, полученных приемником. Настройка сейсморазведки обычно предусматривает этап осуществления сбора акустических данных на приемниках для проверки того, что приемники находятся в требуемых для разведки местоположениях. Эти предварительные акустические данные можно использовать при определении курса приемника способом, отвечающим изобретению. Курс приемника определяют из акустических данных, которые можно использовать при обработке сейсмических данных, которые впоследствии получит приемник.
Можно также специально осуществлять сбор сейсмических или акустических данных для определения курса приемника.
Как было отмечено выше, в реальном приемнике один из горизонтальных чувствительных элементов может измерять составляющую волнового поля точнее, чем другие горизонтальные чувствительные элементы, поэтому для калибровки одного горизонтального чувствительного элемента относительно другого генерируют калибровочный фильтр а(ω). Неопределенности при калибровке горизонтальных чувствительных элементов порождают неоднозначность между курсом приемника и требуемым калибровочным фильтром а(ω). В этом случае функцию стоимости Е1 следует минимизировать для данных, собранных на протяжении нескольких съемок, охватывающих конкретный диапазон азимутов, а не для данных, собранных при одной съемке. Однако во избежание проблем, обусловленных калибровочными фильтрами с азимутальной зависимостью, следует всякий раз выбирать данные для съемок, охватывающих лишь ограниченный диапазон азимутов по времени.
Определив курс датчика, можно осуществлять калибровку измеренного давления относительно горизонтальных составляющих скорости частиц. Это осуществляется аналогично определению курса датчика, но, вместо того, чтобы использовать курс датчика как неизвестную переменную, частотно-зависимые фильтры а(ω) и b(ω) свертывают с х- и y-составляющими скорости частиц. Зная курс датчика, можно найти а(ω) и b(ω), что позволяет осуществить калибровку х- и y-составляющих скорости частиц относительно давления.
Для осуществления контроля качества на этапе сбора данных, в принципе, можно использовать любую полученную здесь информацию о калибровочных фильтрах для горизонтальных составляющих. Ее также можно использовать при последующей обработке полученных сейсмических данных.
Пространственные производные в горизонтальных направлениях от давления могут быть получены в явном виде, либо путем сравнения данных, полученных на одном приемнике, для двух разных местоположений источника (производные со стороны источника), либо путем сравнения данных, полученных на соседних приемниках для единичной съемки (производные со стороны приемника), при условии, что для регистрации данных обеспечен достаточно малый промежуток между источниками или приемниками соответственно.
На фиг.1 и 2 представлены возможные системы сейсморазведки, реализующие способ согласно изобретению. На фиг.1 показана система сейсморазведки, содержащая совокупность сейсмических источников (на фиг.1 показаны три источника 1, 1, 1), в данном примере буксируемые судном 2. В результате, получают не линейную картину точек съемки, как в случае одного источника, а двумерный массив, что позволяет оценивать горизонтальные производные давления со стороны источника и использовать в системе сейсморазведки, изображенной на фиг.1, приемник 4, представляющий собой традиционный 4-компонентный приемник.
На фиг.2 изображена система сейсморазведки, содержащая единичный сейсмический источник, поэтому горизонтальные производные давления нужно оценивать со стороны приемника, например, используя приемник, подобный описанному ниже со ссылкой на фиг.4.
Приемник 4, показанный на фиг.1 и 2, может располагаться на морском дне или может буксироваться по воде.
Способ, отвечающий настоящему изобретению, требует знать только разности фаз между различными зарегистрированными данными (т.е. между записями одного и того же события на разных пространственно разделенных приемниках или между записями на одном приемнике аналогичных событий от разных пространственно разделенных источников). Разности фаз можно получать, определяя сдвиг максимума взаимной корреляции указанных записей. Таким образом, полученная разность фаз ϕi равна произведению обратной величины скорости, pi, падающей волны и расстояния между источниками или приемниками, Δi, где нижний индекс i обозначает направление (х или y) разделения источников или приемников. Предположив наличие плоской волны, пространственные градиенты можно связать с производными по времени следующим образом:
Подставляя вышеприведенные выражения в уравнение (5) и исключая производные по времени, можно записать альтернативную формулу для функции стоимости Е1, а именно
Up дискретизация данных до взаимной корреляции повышает точность оценки разностей фаз.
В принципе, в этом варианте осуществления курс датчика можно определить, вычислив величину (ϕхvхпр/Δх-ϕyvупр/Δy) и найдя ориентацию осей приемника, при которой эта величина равна нулю. На практике, как было объяснено выше, ориентацию осей приемника удобнее находить с помощью квадрата этой величины.
Традиционный 4-компонентный сейсмоприемник содержит геофоны для регистрации трех составляющих поля упругой волны (они обычно выполнены в виде единого многокомпонентного геофона) и гидрофон для регистрации давления. С использованием такого приемника невозможно получить пространственные производные давления со стороны приемника, поскольку давление регистрируется только в одном местоположении. Такой традиционный приемник можно использовать в системе разведки, представленной на фиг.1, на которой производные давления определяют со стороны источника.
Осуществив сбор сейсмических данных в процессе сейсморазведки с использованием системы сейсморазведки, показанной на фиг.1 или 2, можно вышеописанным способом определить курс приемника на основании собранных приемником сейсмических данных. Определение курса приемника удобно осуществлять, обрабатывая часть собранных сейсмических данных, например временное окно, содержащее прямую падающую волну. Определив курс приемника, можно обрабатывать некоторые или все полученные приемником сейсмические данные любым традиционным способом с учетом определенного курса приемника.
На фиг.4 представлена схема сейсмоприемника, предназначенного для получения пространственных производных давления со стороны приемника, а следовательно, предназначенного для использования в системе разведки, показанной на фиг.2. Приемник 6, показанный на фиг.4, содержит многокомпонентный датчик 7, регистрирующий три ортогональные составляющие смещения частиц, скорости частиц или ускорения частиц (в принципе, многокомпонентный датчик может регистрировать составляющие производных по времени высших порядков от смещения частиц), и также содержит, по меньшей мере, три гидрофона (или других подходящих датчиков давления). На фиг.4 показано три гидрофона 8, 9, 10, но, в принципе, можно обеспечить большее количество гидрофонов. Многокомпонентный датчик 7 и гидрофоны 8, 9, 10 находятся в корпусе 11.
Способ определения курса приемника на основании полученных данных требует знания только х- и y-составляющих смещения частиц (или скорости частиц и т.д.), так что датчик 7, в принципе, может измерять только составляющие х и y смещения частиц (или скорости частиц и т.д.). Однако предпочтительно датчик 7 является трехкомпонентным датчиком, что позволяет регистрировать вертикальную составляющую смещения частиц (или скорости частиц и т.д.). Многокомпонентный датчик 7 предпочтительно является многокомпонентным геофоном, хотя, в принципе, вместо многокомпонентного геофона можно использовать совокупность однокомпонентных геофонов.
На фиг.4 также показан несущий кабель 5. Приемник 6 может быть подключен к несущему кабелю 5, как в традиционных системах кабеля и приемников, или может быть отключен от несущего кабеля. Для простоты, на фиг.4 не показаны электрические соединения между несущим кабелем 5, датчиком 7 и гидрофонами 8, 9, 10.
На фиг.4 показан только один приемник 6, но на практике, на несущем кабеле можно обеспечить большое количество приемников, расположенных с некоторыми промежутками.
Гидрофоны 8, 9, 10 сейсмоприемника 6 распределены по горизонтальной плоскости неколлинеарным образом, так что распределение гидрофонов имеет конечную протяженность в направлениях хпр и yпр. Гидрофоны предпочтительно лежат в общей горизонтальной плоскости. Это распределение гидрофонов обеспечивает получение производных давления в направлениях хпр и yпр путем сравнения значений давления, зарегистрированных на двух или более гидрофонах. Например, оценку ∂упрР можно получить вычитанием давления, зарегистрированного на гидрофоне 10, из давления, зарегистрированного на гидрофоне 8, и разделив полученную разность на расстояние между двумя гидрофонами.
Точность оценки производных давления повышается по мере уменьшения промежутка между гидрофонами. Поэтому предпочтительно, чтобы промежуток между гидрофонами составлял порядка сантиметра, в таком случае можно было бы сказать, что распределение гидрофонов приемника 6 обладает высокой поверхностной плотностью.
На фиг.1 и 2 показан приемник 4, применяемый в морской сейсморазведке. Приемник, отвечающий настоящему изобретению, не обязательно использовать в морской сейсморазведке, его также можно использовать, например, в наземной сейсморазведке или развертывать в буровой скважине. Помимо вышеуказанных применений, способ и сейсмоприемник согласно настоящему изобретению также имеют преимущества для других целей в разведке на углеводороды, в том числе ослабление шума и обеспечение мер контроля качества для сейсмических данных.
Пример способа согласно изобретению будет проиллюстрирован посредством синтетических сейсмических данных, генерируемых с помощью коэффициента отражений согласно способу, описанному Кеннетом (B.L.N.Kennett) в "Seismic wave propagation in stratified media" («Распространение сейсмических волн в слоистых средах») Cambridge University Press, Кембридж, Англия (1983). Эти синтетические сейсмические данные были смоделированы для системы сейсморазведки, аналогичной системе, показанной на фиг.2, в которой производные давления получают со стороны приемника. Данные, используемые согласно способу, состоят из временного окна, содержащего только прямую падающую волну. Моделирование было осуществлено для приемника, ориентированного так, чтобы его оси хпр и yпр совпадали с глобальными осями х и y (т.е. α=0). Синтетические сейсмические данные, полученные моделированием, включают в себя давление, пространственные производные давления по осям хпр и yпр и составляющие скорости частиц по осям хпр и yпр.
На средней диаграмме фиг.3(а) показано двумерное представление трехмерного графика функции стоимости Е1 в диапазоне азимутов -45°<θ<+45°. Наиболее темные участки на фиг.3(а) обозначают области, где функция стоимости имеет минимальное значение. Функция стоимости Е1 вычислена для синтетических сейсмических данных, не содержащих шума, и вычислена в диапазоне -10°<α<+10°. Поскольку моделирование осуществлялось с учетом условия, что оси приемника выровнены с глобальными осями, функция стоимости Е1 должна достигать минимума при α=0. Центральная диаграмма на фиг.3(а) показывает, что функция стоимости действительно достигает минимума при α=0 на всем исследуемом диапазоне азимута. Курс датчика строго определен и может быть точно оценен для всех азимутов падающей волны.
Верхняя и нижняя диаграммы на фиг.3(а) иллюстрируют влияние неточной калибровки чувствительных элементов на регистрацию горизонтальных составляющих скорости частиц. Моделирование этих диаграмм осуществляли с использованием тех же синтетических данных, не содержащих шума, которые использовались для генерации центральной диаграммы. Влияние неточно откалиброванных чувствительных элементов было смоделировано путем применения калибровочного фильтра к продольной горизонтальной составляющей измеренной скорости частиц (vx). При моделировании использовали простой калибровочный фильтр, состоящий в умножении продольной горизонтальной составляющей измеренной скорости частиц на скалярный коэффициент scx до вычисления Е1. На верхней и нижней диаграммах на фиг.3(а) показаны поперечные сечения E1, полученные из синтетических данных, в которых vx умножено на скалярный коэффициент scx=0,8 (верхняя диаграмма) и на скалярный коэффициент scx=1,2 (нижняя диаграмма). Можно видеть, что на верхней и нижней диаграммах минимум E1 смещен относительно нуля (за исключением случая θ=0), т.е. неточная калибровка чувствительных элементов приводит к ошибке в оценке курса датчика, которая ведет себя как функция косинуса.
Оценка ориентации датчика должна быть одинакова для всех азимутов падающей волны. Таким образом, если вычисление функции стоимости Е1 обеспечивает результаты в виде, показанном на верхней и нижней диаграммах фиг.3(а), и, таким образом, показывает неточную калибровку чувствительных элементов, этот факт можно использовать для определения калибровочного коэффициента, необходимого для точной калибровки чувствительных элементов. Для этого можно найти калибровочный коэффициент, который минимизирует изменение оценочного курса датчика с азимутом, т.е. найти калибровочный коэффициент, минимизирующий отклонение или какой-либо иной параметр, характеризующий изменение оценочного курса датчика с азимутом. Исходя из указанного, точный калибровочный коэффициент является калибровочным коэффициентом, который минимизирует вторую функцию стоимости Е2:

На фиг.3(b) показана вторая функция стоимости Е2 как функция scx для данных, представленных на фиг.3(а). Как ожидалось, на фиг.3(b) показано, что требуемый калибровочный коэффициент в модели, представленной на фиг.3(а), это scx=1,0. На фиг.3(b) показано, что требуемый калибровочный коэффициент строго ограничен и может быть точно оценен.
В примере, приведенном на фиг.3(а) и 3(b), влияние неточно калиброванных чувствительных элементов было смоделировано калибровочным фильтром, который представляет собой просто постоянный коэффициент scx. В практической сейсморазведке калибровочный фильтр, скорее всего, будет сложнее, чем описанный. Однако точный калибровочный фильтр все же можно найти, определив изменение оценочного курса датчика с азимутом. Точный калибровочный фильтр - это калибровочный фильтр, который минимизирует изменение оценочного курса датчика с азимутом.
Фиг.3(с) и 3(е), в целом, соответствуют фиг.3(а), но получены для синтетических сейсмических данных, в которых частные производные давления и составляющие скорости частиц содержат белый шум. Результаты, представленные на фиг.3(с), получены для синтетических сейсмических данных, имеющих отношение сигнал-шум 20 дБ, и результаты, представленные на фиг.3(е), получены для синтетических сейсмических данных, имеющих отношение сигнал-шум 10 дБ. На фиг.3(d) и 3(f) показана вторая функция стоимости Е2 для данных, представленных на фиг.3(с) и 3(е) соответственно. Во всех этих численных примерах курс датчика можно с высокой точностью оценить, а именно с точностью 0,5 градуса. Добавление шума к синтетическим данным, в целом, не влияет на вид второй функции стоимости Е2, хотя, согласно фиг.3(f), Е2 принимает минимальное значение при scx, немного отличающимся от 1,0.
Способы калибровки двух горизонтальных чувствительных элементов, предложенные Гейзером и Багаини, описанные выше, основаны на минимизации энергии, поперечной к радиально-вертикальной плоскости, где радиальное направление задано координатами источника и приемника. Согласно этим способам для определения радиального направления необходимо знать координаты источника и приемника, но это не всегда удается.
Настоящее изобретение можно применить к этим способам калибровки, известным из уровня техники. Настоящее изобретение позволяет определить направление азимутального угла (θ) сейсмической волны, и этот угол задает радиальное направление. Таким образом, изобретение позволяет определять радиальное направление для каждой съемки в отдельности и тем самым устранять возможные неточности, связанные с использованием оценочных координат источника и приемника.
Настоящее изобретение описано выше со ссылкой на способы сейсморазведки, согласно которым приемники развернуты на донном кабеле. Однако настоящее изобретение не ограничивается морской сейсморазведкой. Способ определения ориентации датчика, в принципе, применим к любому многокомпонентному сейсмоприемнику, например сейсмоприемнику, развернутому на суше, сейсмоприемнику, буксируемому по воде, и сейсмоприемнику, развернутому в буровой скважине. Способ калибровки горизонтальных чувствительных элементов сейсмоприемника, в принципе, применим к любому сейсмоприемнику. Кроме того, сейсмоприемник, отвечающий настоящему изобретению, можно использовать в системах сейсморазведки на основе океанского донного кабеля (ОКД), но также можно использовать в любой традиционной системе сейсморазведки.
В вышеописанном примере изобретения курс датчика определяют с использованием пространственных производных давления в двух горизонтальных направлениях и с использованием двух горизонтальных составляющих скорости частиц. Однако изобретение не ограничивается использованием составляющих скорости частиц. В своем наиболее общем виде изобретение предусматривает определение курса датчика на основании информации об, по меньшей мере, одном из параметров, а именно давлении, измеренном на приемнике, и смещении частиц или его производной, измеренном(ой) на приемнике. В вышеприведенном примере первая функция стоимости Е1 содержит составляющие скорости частиц (т.е. составляющие производной по времени от смещения частиц). Если же составляющие скорости частиц в этой первой функции стоимости Е1 заменить составляющими смещения частиц, можно получить альтернативную первую функцию стоимости Е1':

где uхпр, uупр - составляющие смещения частиц по осям х и y приемника. Курс датчика можно определить, найдя ориентацию осей х и y приемника, при которой функция стоимости Е1 - достигает минимума.
Кроме того, заменив составляющие скорости частиц в первой функции стоимости Е1 составляющими ускорения частиц (т.е. второй производной по времени смещения частиц), можно получить еще одну альтернативную первую функцию стоимости Е1":
 где ахпр, аупр - составляющие ускорения частиц по осям приемника х и y. Курс датчика можно определить, найдя ориентацию осей х и y приемника, которая минимизирует функцию стоимости Е1".
где ахпр, аупр - составляющие ускорения частиц по осям приемника х и y. Курс датчика можно определить, найдя ориентацию осей х и y приемника, которая минимизирует функцию стоимости Е1".
В принципе, составляющие скорости частиц в первой функции стоимости Е1 можно заменить составляющими производной по времени третьего или более высокого порядка от смещения частиц.
Когда курс датчика определяют с использованием смещения или ускорения частиц (или производной по времени более высокого порядка от смещения частиц), измеренное давление можно калибровать относительно составляющих смещения частиц, ускорения или производной по времени более высокого порядка. Для этого можно использовать способ калибровки, аналогичный вышеописанному способу калибровки измеренного давления относительно горизонтальных составляющих скорости частиц, определив курс датчика. Иными словами, частотно-зависимые фильтры а(ω) и b(ω) свертывают с х- и y-составляющими смещения или ускорения частиц (или производной по времени более высокого порядка от смещения частиц), и, зная курс датчика, можно найти а(ω) и b(ω) и, таким образом, откалибровать х- и y-составляющие смещения или ускорения частиц (или производной по времени более высокого порядка от смещения частиц) относительно давления.
Согласно вышеописанным предпочтительным вариантам осуществления курс приемника определяют с использованием горизонтальных пространственных производных давления на приемнике. В принципе, вместо пространственных производных давления можно использовать горизонтальные пространственные производные смещения частиц на приемнике. В этом случае, курс датчика можно получить с использованием функций стоимости, аналогичных вышеупомянутым функциям стоимости Е1, Е1' и Е1", в которых члены ∂упрР и ∂хпрР заменены на ∂упрu и ∂хпрu. В принципе, пространственные производные смещения частиц можно определить со стороны источника, например, используя двумерный массив источников, аналогичный показанному на фиг.1, или со стороны приемника, используя приемник, аналогичный показанному на фиг.4, но имеющий двумерный массив датчиков смещения частиц.
На фиг.5 представлена блок-схема устройства 12 для осуществления способа, отвечающего настоящему изобретению. Устройство содержит программируемый процессор 13 данных с памятью 14 программ, например, в виде постоянной памяти (ПЗУ), в которой хранится программа для управления процессором 13 данных, в соответствии с которой он осуществляет, например, вышеописанный способ. Устройство также дополнительно содержит энергонезависимую память 15 с возможностью считывания/записи для хранения, например, любых данных, которые необходимо сохранять при отсутствии питания. «Рабочая» или «сверхбыстродействующая» память для процессора данных предусмотрена в виде оперативной памяти (ОЗУ) 16. Входной интерфейс 17 предусмотрен, например, для приема команд и данных. Выходной интерфейс 18 предусмотрен, например, для отображения информации, относящейся к ходу выполнения и результату способа. Данные, подлежащие обработке, можно подавать через входной интерфейс 17 или можно, в необязательном порядке, обеспечивать посредством машинно-считываемого запоминающего устройства 19.
Программа для эксплуатации системы и осуществления вышеописанного способа хранится в памяти 14 программ, которая может быть выполнена в виде полупроводниковой памяти, например общеизвестного ПЗУ. Однако программа может храниться в другой подходящей запоминающей среде например, на магнитном носителе 14а данных (например, дискете), или на CD-ROMe 14b.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |
| СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ ДЛЯ ПОДАВЛЕНИЯ МНОГОКРАТНЫХ ПЕРЕОТРАЖЕНИЙ | 1994 |
|
RU2116657C1 |
| ПОНИЖЕНИЕ УРОВНЯ ШУМА С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ВРАЩЕНИЯ | 2012 |
|
RU2562932C2 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМОСИГНАЛОВ НА АКВАТОРИИ МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270464C1 |
| СПОСОБ МОРСКОЙ СЕЙСМОРАЗВЕДКИ | 2012 |
|
RU2502091C2 |
| СПОСОБ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ | 2012 |
|
RU2490669C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| ВЫЧИСЛЕНИЕ ДАННЫХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГРАДИЕНТА ДАННЫХ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2014 |
|
RU2733976C2 |
| Способ получения сейсмических записей,ориентированных по азимуту в скважине | 1985 |
|
SU1325393A1 |

Изобретение относится к области сейсмической разведки и может быть использовано для определения ориентации сейсмоприемника, в частности для определения его ориентации в горизонтальной плоскости. Сущность изобретения: осуществляют сбор сейсмических или акустических данных на приемнике. Указанные данные включают в себя, по меньшей мере, один из параметров: давление, смещение частиц или производную по времени от смещения частиц. Определяют пространственные производные от давления, смещения частиц на приемнике или производную по времени от смещения частиц в первом и втором горизонтальных направлениях. При этом первое направление отличается от второго направления. Определяют ориентацию приемника на основании указанных пространственных производных. Технический результат: повышение точности получаемой информации. 5 н. и 26 з.п. ф-лы, 5 ил.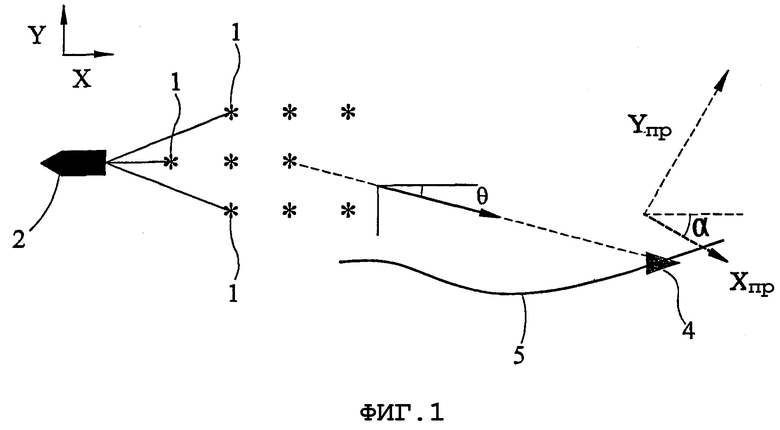
| МОБИЛЬНЫЙ ПУНКТ ЗАБОРА И ПЕРЕРАБОТКИ КРОВИ | 2007 |
|
RU2349468C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХКОМПОНЕНТНЫЙ СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046374C1 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2112877C1 |
| US 4995013 А, 19.02.1991 | |||
| US 6131694 А, 17.10.2000. | |||

