Изобретение относится к области судостроения, в частности к системам контроля параметров посадки преимущественно подводных объектов в надводном положении в условиях качки на волнении, и предназначено для определения в этих условиях параметров статической посадки (крен, дифферент, осадка в равновесном положении на тихой воде). В свою очередь, знание этих параметров необходимо для решения в повседневных условиях и при аварии, связанной с изменением плавучести и остойчивости, задач информационной поддержки экипажа объекта - оценки состояния объекта, прогноза изменения этого состояния, выработки рекомендаций по повышению безопасности объекта, а также по спасению экипажа. Система позволяет решать эти задачи как при наличии, так и при отсутствии информации о затоплении отсеков и цистерн.
Известна система автоматического контроля посадки судна на волнении (авт. св. 1652183, 1991 г. ), принятая в качестве прототипа, содержащая преобразователи текущих значений осадки, крена и дифферента, а именно четыре преобразователя давления, расположенных в кормовой, носовой и средних частях корпуса судна, гировертикаль с установленными на ней преобразователями крена, дифферента, а также измерительно-вычислительное устройство. При этом преобразователи осадки через ультразвуковые каналы связи соединены с измерительно-вычислительным устройством, с которым также соединены преобразователи крена и дифферента, установленные на гировертикали.
Однако, в случае использования такой системы для определения параметров статической посадки подводного объекта в надводном положении в условиях волнения и качки, и, тем более, в аварийных ситуациях при статических наклонениях, эти параметры посадки будут определяться с погрешностями, обусловленными несимметрией колебаний объекта при бортовой, килевой качке, несимметрией колебаний его осадки, нелинейностью выходных сигналов преобразователей осадки, влиянием волнового профиля, погрешностями, обусловленными изменением атмосферного давления и плотности воды. Эта система не позволяет также визуально снимать результаты измерений параметров посадки непосредственно с первичных преобразователей этих параметров. Кроме того, размещение преобразователей осадки на наружной части корпуса объекта приведет к трудностям по их обслуживанию и замене (включая замену источников питания, имеющихся в каждом из четырех преобразователей осадки), а их размещение в оконечностях объекта приведет к необходимости прокладки соединительных кабелей значительной длины. Применение гировертикали в системе ограничивает ее надежность, повышает энергопотребление, требует высококвалифицированного обслуживания.
Заявляемое изобретение направлено на решение задачи, заключающейся в повышении точности определения параметров статической посадки аварийного подводного объекта в надводном положении в условиях качки на волнении путем непосредственного измерения средних во времени значений параметров посадки, применения конструкции первичных преобразователей, обеспечивающих линейную зависимость между измеряемым параметром посадки и выходным сигналом, а также непосредственно снимаемым показанием этого параметра, повышения достоверности измерений параметров посадки, устранения влияния изменения атмосферного давления и плотности воды, повышении надежности, упрощении эксплуатации и снижении энергопотребления системы.
Для этого система определения параметров посадки аварийного подводного объекта в надводном положении в условиях качки, содержащая динамические (для измерения текущих значений углов крена, дифферента и осадки) кренометр, дифферентометр и осадкомер, выходы которых соединены с входами измерительно-вычислительного устройства, снабжена статическими (для измерения средних во времени значений углов крена, дифферента и осадки) кренометром, дифферентометром и осадкомером, а также табло (для индикации изменяемых параметров посадки), блоком управления и автономным источником питания. При этом каждый динамический и статический кренометр и дифферентометр снабжен датчиком угла (например, емкостного типа или на основе вращающегося трансформатора) и выполнен преимущественно в виде частично заполненного жидкостью кольцевого канала, разделенного вставкой-дросселем, причем плоскость вращения контура, образующего кольцевой канал динамического и статического кренометров, ориентирована параллельно плоскости шпангоута, а плоскость вращения контура, образующего кольцевой канал динамического и статического дифферентометров, ориентирована параллельно диаметральной плоскости объекта, причем кренометры и дифферентометры размещены вблизи центра тяжести этого объекта. При этом статический осадкомер выполнен преимущественно в виде электронного преобразователя и прямой мерительной трубы, размещенной на объекте таким образом, что ее ось совпадает с линией пересечения диаметральной плоскости и плоскости шпангоута объекта. Причем нижний конец мерительной трубы расположен вблизи плоскости ватерлинии, соответствующей минимальной осадке объекта на тихой воде, и сообщен через дроссель, трубопровод и фильтр-ловушку с водным забортным пространством, а верхний конец мерительной трубы расположен вблизи плоскости ватерлинии, соответствующей максимальной осадке объекта на тихой воде, и через воздухоприемник сообщен с атмосферой, причем мерительная труба снабжена датчиком длины водяного столба (например, емкостного типа), соединенным своим выходом с входом электронного преобразователя. При этом динамический осадкомер имеет свой электронный преобразователь и преимущественно два датчика разности давлений (давления столба воды над датчиком и наружным давлением воздуха), размещенных ниже минимальной осадки на одной оси, совпадающей с осью мерительной трубы. При этом каждый из датчиков разности давлений сообщен трубопроводом одним входом с водным забортным пространством, а другим входом и другим трубопроводом через воздухоприемник сообщен с атмосферой, при этом выходы датчиков разности давлений соединены с входами электронного преобразователя динамического осадкомера, а выходы динамических и статических креномеров, дифферентометров и осадкомеров соединены через блок управления с входами измерительно-вычислительного устройства и табло. Выходы статических кренометра, дифферентометра и осадкомера соединены с входами измерительно-вычислительного устройства и табло через электрические сглаживающие фильтры.
Статические кренометр, дифферентометр и осадкомер, а также динамические кренометр и дифферентометр снабжены прозрачными вставками и шкалами.
Система также снабжена размещаемым (при необходимости) вне основного корпуса объекта выносным табло, входы которого соединены через герметичный электрический разъем, установленный на внешней части корпуса объекта, и через блок управления с выходами динамических и статических кренометров, дифферентометров и осадкомеров (при отсутствии необходимости использования выносного табло указанный разъем закрыт герметичной крышкой).
Электронным преобразователем динамического осадкомера реализуется зависимость
где
T(t) - текущее значение осадки в связанной с объектом системе координат;
P1(t) - текущая разность давления, измеренная нижним датчиком;
P2(t) - текущая разность давления, измеренная верхним датчиком;
Z1 - аппликата средней части чувствительного элемента (мембраны) нижнего датчика;
Z2 - аппликата средней части чувствительного элемента (мембраны) верхнего датчика.
Электронным преобразователем статического осадкомера с помощью сумматора и источника опорного сигнала реализуется зависимость
где - среднее во времени значение осадки в связанной с объектом системе координат;
- среднее во времени значение осадки в связанной с объектом системе координат; - среднее во времени значение длины водяного столба в мерительной трубе, измеряемого (датчика и длины водяного столба) по ее оси от начала диапазона измерения этого столба;
- среднее во времени значение длины водяного столба в мерительной трубе, измеряемого (датчика и длины водяного столба) по ее оси от начала диапазона измерения этого столба;
Z0 - аппликата начала диапазона измерения длины водяного столба в мерительной трубе.
При этом в условиях тихой воды и при отсутствии качки результаты измерений динамическим и статическим осадкомерами совпадают между собой
где - длина водяного столба в мерительной трубе;
- длина водяного столба в мерительной трубе;
To - статическая осадка объекта.
В этих условиях также совпадают между собой результаты измерений динамическим и статическим кренометром
где
θ (t) - текущее значение угла крена, измеренное динамическим кренометром; - среднее во времени значение угла крена, измеренное статическим кренометром;
- среднее во времени значение угла крена, измеренное статическим кренометром;
θo - статической угол крена объекта
и результаты измерений динамическим и статическим дифферентометром также совпадают между собой
где
ψ (t) - текущее значение угла дифферента, измеренное динамическим дифферентометром; - среднее во времени значение угла дифферента, измеренное статическим дифферентометром;
- среднее во времени значение угла дифферента, измеренное статическим дифферентометром;
ψo - статический угол дифферента объекта.
Введение в систему статических кренометра, дифферентометра и осадкомера, выполненных на основе значительно демпфированных гидравлических маятников, например, приведенных в описании изобретения к патенту РФ N 2035352, а также в заявках на изобретения N 96113738 от 04.07.96 и N 9610765 от 09.04.96, при использовании измерительно-вычислительного устройства (например, ПЭВМ с аналого-цифровым преобразователем), по разработанной программе реализует способ, изложенный в описании изобретения к патенту РФ N 2066655, позволяет автоматически определять параметры статической посадки аварийного подводного объекта в надводном положении в условиях волнения и качки.
Введение в систему одного или нескольких табло, выполненных, например, на основе цифровых вольтметров, амперметров или аналоговых индикаторов (регистраторов), позволяет получать в любом месте внутри объекта текущие и средние во времени значения углов крена, дифферента и осадки без использования измерительно-вычислительного устройства и без оператора, что важно при отсутствии питания в штатной бортовой сети и при работе в аварийном режиме от автономного источника, также введенного в систему.
Выполнение динамических и статических кренометров и дифферентометров на основе кольцевых каналов, а статического осадкомера на основе прямой мерительной трубы обеспечивает линейную зависимость между измеряемым параметром посадки и соответствующим ему электрическим сигналом, а также обеспечивает использование линейных шкал для непосредственных визуальных отсчетов параметров посадки.
Выполнение статического осадкомера на основе прямой мерительной трубы, а динамического осадкомера на основе двух датчиков разности давлений позволяет устранить влияние наклонений объекта, изменений атмосферного давления и плотности воды на точность измерений текущей и средней во времени осадок в связанной системе координат, а установка этих преобразователей на одной оси позволяет повысить достоверность таких измерений путем их сравнения между собой на тихой воде. Также для этого на тихой воде сравниваются между собой результаты измерений статического и динамического кренометров и аналогично статического и динамического дифферентометров.
Наличие электрических сглаживающих фильтров в цепях сигналов статических кренометра, дифферентометра и осадкомера (в дополнение к гидравлическим) позволяет уменьшить время запаздывания получения результата измерений при заданной динамической ошибке.
Наличие прозрачных вставок и шкал у гидравлических маятников статических кренометра, дифферентометра и осадкомера, а также у динамических кренометра и дифферентометра позволяет повысить достоверность результатов этих измерений путем визуального отсчета по шкале через прозрачную вставку каждого из указанных преобразователей и сравнения этого результата с результатом электрического измерения этим же преобразователем. В случае полного отсутствия питания, включая автономное, такие вставки и шкалы позволяют измерять параметры посадки непосредственно по ним визуально.
Введение в систему выносного табло позволяет в необходимых случаях получать информацию о параметрах посадки объекта вне его основного корпуса, когда внутри его нет возможности находиться экипажу.
Сущность изобретения поясняется чертежом, где схематично представлена система определения параметров посадки аварийного подводного объекта в надводном положении в условиях качки.
Система содержит динамические кренометр 1, дифферентометр 2 и осадкомер 3, а также статические кренометр 4, дифферентометр 5 и осадкомер 6. При этом выходы кренометра 1, дифферентометра 2 и осадкомера 3, а также кренометра 4, дифферентометра 5 и осадкомера 6, но через электрические сглаживающие фильтры 7, 8 и 9 соединены через блок управления 10 с входами измерительно-вычислительного устройства 11 и параллельно с входами табло 12, а также в случае необходимости через герметичный разъем 13 - с выносным табло 14. Также система содержит автономный источник питания 15.
Осадкомер 3 содержит нижний 16 и верхний 17 датчики разности давлений и электронный преобразователь 18. При этом одни входы датчиков 16, 17 сообщены трубопроводом 19 через фильтр-ловушку 20 с водным забортным пространством, а другие входы датчиков 16, 17 сообщены трубопроводом 21 через воздухоприемник 22 с наружной воздушной средой. Выходы датчиков 16, 17 соединены с входами преобразователя 18, выход которого является выходом динамического осадкомера 3. Статический осадкомер 6 содержит мерительную трубу 23 с датчиком 24 длины водяного столба в трубе 23. Выход датчика 24 соединен с входом электронного преобразователя 25, выход которого является выходом осадкомера 6. Мерительная труба 23 нижним концом сообщена через дроссель 26, трубопровод 19 и фильтр-ловушку 20 с водным забортным пространством, а верхним концом через воздухоприемник 27 сообщена с наружной воздушной средой. При этом датчики 16, 17 динамического осадкомера 3 находятся на одной оси с осью мерительной трубы 23 статического осадкомера 6, а кренометры 1, 4 и дифферентометры 2, 5 размещены вблизи центра тяжести объекта.
Система работает следующим образом. При качке объекта на волнении текущие значения углов крена и дифферента, а также осадки преобразуются динамическими кренометром 1, дифферентометром 2 и осадкомером 3 в электрические сигналы (ток или напряжение), прямо пропорциональные этим параметрам посадки. При изменении угла крена (дифферента) объекта жидкость в кольцевом канале кренометра 1 (дифферентометра 2) будет двигаться по дуговой траектории и ее перемещение будет преобразовываться датчиком угла в линейный электрический сигнал. При этом дроссель-вставка 28 имеет незначительное гидравлическое сопротивление и кренометр 1 (дифферентометр 2) является динамическим.
При изменении осадки объекта датчики разности давлений 16, 17 динамического осадкомера 3, измеряют текущие значения только водяного столба над этими датчиками (т. е. не реагируют на изменение атмосферного давления). Электронный преобразователь 18, соединенный своими входами с выходами датчиков 16, 17, реализует зависимость (1) и выходной сигнал этого преобразователя прямо пропорционален текущему значению осадки в связанной с объектом системе координат. При изменении крена (дифферента) объекта жидкость в кольцевом канале кренометра 4 (дифферентометра 5) будет двигаться по дуговой траектории и ее перемещение будет преобразовываться в линейный электрический сигнал. При этом дроссель-вставка 29 имеет значительное гидравлическое сопротивление и выполняет роль фильтра частот качки объекта, а кренометр 4 (дифферентометр 5) является статическим и непосредственно измеряет среднее во времени значение угла крена (дифферента).
При изменении осадки объекта вода в мерительной трубе 23 осадкомера 6 будет перемещаться. При этом дроссель 26, имеющий значительное гидравлическое сопротивление, выполняет роль фильтра колебаний осадки, а осадкомер 6 является статическим и непосредственно измеряет среднее во времени значение осадки в связанной с объектом системе координат. При этом датчик длины водяного столба 24 своим выходом соединен с входом электронного преобразователя 25, который реализует зависимость (2). Выходные сигналы кренометра 1, дифферентометра 2 и осадкомера 3, а также через сглаживающие электрические фильтры 7, 8 и 9 кренометра 4, дифферентометра 5 и осадкомера 6 подаются через блок управления 10 на входы измерительно-вычислительного устройства 11 по разработанной программе определяющего средние размахи бортовой, килевой качки, колебаний осадки и статические значения углов крена, дифферента и осадки. Также параллельно сигналы с преобразователей 1, 2, 3, 4, 5 и 6 подаются на входы табло 12 для индикации текущих и средних во времени значений углов крена, дифферента и осадки, независимо от возможности использования измерительно-вычислительного устройства 11, а в необходимых случаях эти сигналы через герметичный разъем 13 подаются за пределы основного корпуса объекта на выносное табло 14, которое в необходимых случаях может быть размещено на буксирующем судне. Проверка достоверности значений электрических измерений углов крена, дифферента и осадки осуществляется на тихой воде давлением между собой на табло 12 (или 14) результатов измерений преобразователей 1 и 4, 2 и 5, 3 и 6. В случае полного отсутствия электропитания измерения параметров посадки осуществляются непосредственно визуально со шкал преобразователей 1, 2, 4, 5 и 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СТАТИЧЕСКОЙ ПОСАДКИ ПОДВОДНОГО ОБЪЕКТА В НАДВОДНОМ ПОЛОЖЕНИИ В УСЛОВИЯХ КАЧКИ | 1993 |
|
RU2066655C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА КРЕНА ИЛИ ДИФФЕРЕНТА ПЛАВУЧЕГО СРЕДСТВА В УСЛОВИЯХ КАЧКИ | 1992 |
|
RU2035352C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА КРЕНА ИЛИ ДИФФЕРЕНТА ПЛАВУЧЕГО СРЕДСТВА НА ВОЛНЕНИИ | 1996 |
|
RU2114758C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОСАДКИ ПЛАВУЧЕГО СРЕДСТВА В УСЛОВИЯХ КАЧКИ | 1999 |
|
RU2151710C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| АКТИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 2015 |
|
RU2616505C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОСАДКИ ПЛАВУЧЕГО СРЕДСТВА НА ВОЛНЕНИИ | 1996 |
|
RU2111889C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОСАДКИ ПЛАВУЧЕГО СРЕДСТВА В УСЛОВИЯХ КАЧКИ | 2005 |
|
RU2284944C2 |
| ПОДВОДНЫЙ ТАНКЕР | 1993 |
|
RU2062731C1 |
| УНИВЕРСАЛЬНЫЙ ТОПЛИВНЫЙ ЭЛЕКТРООЧИСТИТЕЛЬ | 1993 |
|
RU2040971C1 |
Изобретение относится к области судостроения, в частности к системам контроля параметров посадки подводных объектов в надводном положении в условиях качки на волнении, и предназначено для определения в этих условиях параметров статической посадки. Система содержит динамические и статические кренометр, дифферентометр и осадкомер, измерительно-вычислительное устройство, табло, блок управления и автономный источник питания, каждый динамический и статический кренометр и дифферентометр снабжен датчиком угла и размещен вблизи центра тяжести объекта. Статический осадкомер выполнен в виде электронного преобразователя и прямой мерительной трубы. Мерительная труба снабжена датчиком длины водяного столба, соединенным своим выходом с входом электронного преобразователя. Динамический осадкомер имеет свой электронный преобразователь и два датчика разности давлений, размещенных ниже минимальной осадки на одной оси, совпадающей с осью мерительной трубы. Каждый из датчиков разности давлений сообщен трубопроводом одним входом с водным забортным пространством, а другим входом и другим трубопроводом через воздухоприемник сообщен с атмосферой. Выходы датчиков разности давлений соединены с входами электронного преобразователя динамического осадкомера. Выходы динамических и статических кренометров, дифферентометров и осадкомеров соединены через блок управления с входами измерительно-вычислительного устройства и табло. Достигается повышение точности определения параметров статической посадки аварийного подводного объекта в надводном положении в реальных условиях. 3 з.п. ф-лы, 1 ил.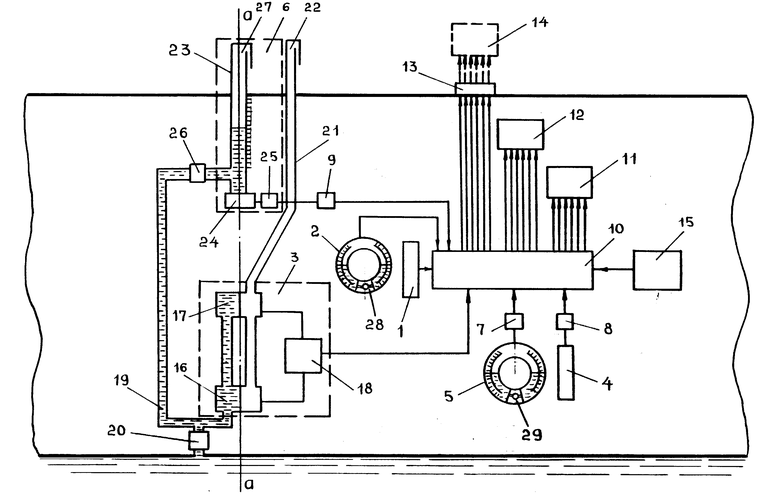
| SU, 1652183 A, 30.05.91 | |||
| SU, 2066655 C, 20.09.96. |

