Изобретение относится к области судостроения и касается вопроса создания технических средств успокоения бортовой качки судна на волнении.
Известна автоматизированная система кренования судна (см. патент РФ №2522671), являющаяся аналогом по конструкции, содержащая рабочее тело, выполненное в виде размещенного в расположенной поперек диаметральной плоскости судна трубе-цилиндре, поршня, перемещаемого в ней с помощью электрогидравлического привода из одного крайнего положения в другое крайнее положение. Данная система предназначена для контроля остойчивости судна на волнении и на спокойной воде, включая аварийные ситуации. Однако эта система не может непосредственно использоваться в качестве активного успокоителя бортовой качки судна.
Известен также активный успокоитель бортовой качки судна «Moving Mass Stabilization System» французской компании Sirehna (DCNS company), принятый в качестве прототипа, содержащий рабочее тело (тележку-твердый груз) с известными массой и положением его центра тяжести, перемещаемое по направляющему устройству (ферме с рельсами) с помощью следящего привода, управляемого вычислительным устройством, в обе стороны поперек судна на задаваемые этим вычислительным устройством расстояния, преобразователи положений этого перемещаемого рабочего тела, кренометр и преобразователь угловой скорости бортовой качки судна (сайт http://www.sirehna.com/, http://website.ec-nantes.fr/sirehna/pdf/DCNS-RESEARCH_SIREHNA_Ship-motion-stabilization.pdf, ttp://pdf.nauticexpo.com/pdf/sirehna/moving-mass-stabilization-system/31637-20823-_2.html).
Однако при использовании известного успокоителя, установленного на верхней палубе судна, при высокой влажности воздуха, наличии забрызгивания или заливаемости при отрицательных температурах наружного воздуха элементы успокоителя могут покрываться льдом, в результате сам успокоитель может выйти из строя. Кроме того, такая конструкция успокоителя опасна в эксплуатации, так как быстродвижущаяся и меняющая свое направление движения тележка-груз, имеющая большую массу (1-2% от массы судна), доступна для эксплуатирующего ее персонала и иных лиц, а также может сталкиваться в аварийных ситуациях с оконечностями упомянутой фермы, например, при аварийном отключении электропитания или при сбое в программе успокоителя (что также может вывести его из строя). Кроме того, данный успокоитель занимает много пространства на судне, чем вызывает сложность его размещения на нем. Также данный успокоитель не предназначен для контроля остойчивости судна.
Предлагаемое изобретение направлено на решение задачи, заключающейся в повышении надежности работы успокоителя в эксплуатационных и аварийных условиях, преимущественно в условиях отрицательных температур, в обеспечении безопасности персонала при его использовании на судне и компактности его размещения на палубе судна при одновременном обеспечении возможности его использования в качестве автоматизированной системы контроля поперечной остойчивости - поперечной метацентрической высоты судна.
Технический результат достигается тем, что в активном успокоителе бортовой качки судна, включающем рабочее тело с известными массой и положением его центра тяжести, перемещаемое по направляющему устройству с помощью следящего привода, управляемого вычислительным устройством, в обе стороны поперек судна на задаваемые вычислительным устройством расстояния, преобразователи положений перемещаемого рабочего тела, кренометр и преобразователь угловой скорости бортовой качки судна, по изобретению рабочее тело выполнено в виде поршня, размещенного в расположенной поперек диаметральной плоскости судна трубе-цилиндре, имеющего на своих торцах ответные фиксирующие гнезда под демпферы-фиксаторы, которые расположены на внутренних торцах трубы-цилиндра и установлены с возможностью обеспечения зазора между торцом поршня -рабочего тела и внутренним торцом трубы-цилиндра. Причем пространство щелевого зазора одной оконечности трубы-цилиндра сообщено трубопроводом через электромагнитные клапаны с напорным и засасывающим патрубками введенного в состав устройства насоса, а пространство щелевого зазора другой ее оконечности сообщено трубопроводом также с засасывающим и напорным патрубками насоса через другие электромагнитные клапаны, при этом пространство упомянутого щелевого зазора одной из оконечностей трубы-цилиндра сообщено с одним входом введенного в состав устройства преобразователя разности давлений, а пространство щелевого зазора другой оконечности трубы-цилиндра сообщено с его другим входом, а электрический выход указанного преобразователя соединен с входом вычислительного устройства. Причем труба-цилиндр с поршнем-рабочим телом, трубопроводы с электромагнитными клапанами и полости насоса при этом полностью заполнены рабочей жидкостью, имеющей удельный вес, меньший удельного веса поршня-рабочего тела. При этом работающие поочередно преобразователи положений, перемещающегося в трубе-цилиндре поршня-рабочего тела, расположены в торцевых оконечностях трубы-цилиндра, причем в качестве этих преобразователей использованы преимущественно ультразвуковые преобразователи, выходы которых, а также выходы кренометра и преобразователя угловой скорости бортовой качки судна соединены с входами вычислительного устройства, с выходами которого соединены входы электромагнитных клапанов и насоса через согласующие устройства, выполненные преимущественно в виде твердотельных реле.
При этом пространства щелевых зазоров каждой из оконечностей трубы-цилиндра сообщены между собой трубопроводом через регулируемый электромагнитный клапан, электрический вход которого через согласующее устройство соединен с выходом вычислительного устройства.
Кроме того, в трубопроводе гидравлического привода или в трубе-цилиндре установлен преобразователь температуры жидкости, выход которого соединен с входом вычислительного устройства.
При этом насос выполнен с регулируемой производительностью.
Кроме того, в качестве рабочей жидкости использована морозостойкая рабочая жидкость.
Наряду с этим активный успокоитель бортовой качки судна оснащен дифферентометром и осадкомером, причем осадкомер выполнен в виде двух преобразователей разности давлений, расположенных на одной нормали к основной плоскости судна, работающих одновременно, положительные входы которых сообщены с водным забортным пространством, а их отрицательные входы сообщены с атмосферой, при этом выходы дифферентометра и упомянутых преобразователей разности давлений соединены с входами вычислительного устройства.
Выполнение рабочего тела в виде поршня, размещенного в расположенной поперек диаметральной плоскости судна трубе-цилиндре (выполненного, например, из свинца, стали или чугуна с заданными геометрическими размерами, с известными объемом и положением центра тяжести), имеющего удельный вес, существенно больший, чем удельный вес рабочей жидкости, перемещающей поршень-рабочее тело в трубе-цилиндре с помощью следящего электрогидравлического привода на задаваемое вычислительным устройством расстояние, позволяет создать компактный моноблок-систему замкнутого типа, предназначенную для активного успокоения бортовой качки судна как в эксплуатационных, так и в аварийных условиях, например, при обледенении в условиях низких температур. Благодаря этому обеспечивается безопасность его эксплуатации на судне для обслуживающего персонала. Размещение на водоизмещающих судах упомянутого компактного моноблока при этом упрощается, причем не только на проектируемых, но и на строящихся и на эксплуатируемых судах.
Размещение на торцах поршня-рабочего тела ответных фиксирующих гнезд под демпферы-фиксаторы, которые выполнены на внутренних торцах трубы-цилиндра, позволяет при их контакте практически исключить удары торцов поршня-рабочего тела о торцы трубы-цилиндра, а также обеспечить зазор между ними, гарантируя этим свободный отход поршня-рабочего тела от его крайнего положения в трубе-цилиндре. Кроме того, демпферы-фиксаторы обеспечивают фиксированное известное расстояние между крайними положениями центра тяжести поршня-рабочего тела в трубе-цилиндре.
Размещение на торцах трубы-цилиндра ультразвуковых преобразователей положений перемещающегося в ней поршня-рабочего тела позволяет определять расстояния от этих преобразователей до ответных к ним торцов поршня-рабочего тела и соответственно положение поршня в трубе-цилиндре в каждый момент времени.
Наличие двух преобразователей положений и их поочередная работа необходимы для обеспечения надежных и точных измерений расстояний от одного из этих преобразователей до направленной к этому преобразователю торцевой поверхности поршня-рабочего тела. В то время как в пространство между одним ультразвуковым преобразователем положения и поршнем-рабочим телом рабочая жидкость нагнетается с большой скоростью, в этом пространстве будет иметь место значительная турбулентность, а излучаемые и принимаемые акустические сигналы будут искажаться. При этом рабочая жидкость из пространства между другим преобразователем положения и поршнем-рабочем телом будет им выдавливаться, но турбулентности в этом пространстве практически не будет, а сигналы этого ультразвукового преобразователя (излучаемый и отраженный) искажаться практически не будут. При этом будут использоваться результаты измерений только от одного из двух ультразвуковых преобразователей, того преобразователя, который сообщен с пространством, где поршень-рабочее тело выдавливает рабочую жидкость из трубы-цилиндра.
Сообщение с пространством щелевого зазора одной из оконечностей трубы-цилиндра с одним входом и сообщение пространства щелевого зазора другой из оконечностей трубы-цилиндра с другим входом введенного в состав устройства успокоителя, преобразователя разности давлений позволяет определить, куда движется поршень-рабочее тело, и соответственно, в каком из двух пространств трубы-цилиндра отсутствует турбулентность (по знаку измеряемого этим преобразователем перепада давлений).
Полное заполнение рабочей жидкостью трубы-цилиндра с находящимся в нем поршнем-рабочим телом, трубопроводов с электромагнитными клапанами и полостей насоса обусловлено необходимостью исключения в них наличия свободных поверхностей и воздушных полостей, за счет чего улучшаются эксплуатационные характеристики работы такой замкнутой системы.
Кроме того, преобразователь разности давлений контролирует перепад давлений на поршне-рабочем теле, а сообщение трубопроводом между собой пространств щелевых зазоров в оконечностях трубы-цилиндра через регулируемый электромагнитный клапан позволяет управлять этим перепадом давления.
Оснащение успокоителя бортовой качки дифферентометром и осадкомером (с использованием кренометра, данных о задаваемом кренящем моменте, о поверхности корпуса судна) позволяет обеспечить использование успокоителя по дополнительному назначению - для контроля поперечной остойчивости судна. Выполнение осадкомера в виде двух преобразователей разности давлений, работающих одновременно, размещенных на одной нормали к основной плоскости, положительные входы которых сообщены с водным забортным пространством, а их отрицательные сообщены с атмосферой, позволяет определять мгновенные значения осадки в связанной системе координат, не требуя при этом внесения поправок на мгновенные значения углов крена и дифферента.
Оснащение успокоителя насосом с регулируемой производительностью позволяет обеспечить непрерывное управление перемещением поршня-рабочего тела в трубе-цилиндре.
Введение в трубопровод или в трубу-цилиндр успокоителя преобразователя температуры рабочей жидкости позволяет контролировать ее температуру и, соответственно, вязкость, влияющую на скорость перемещения поршня-рабочего тела в трубе-цилиндре.
Использование в качестве рабочей жидкости морозостойкой жидкости позволяет обеспечить работу успокоителя при установке его на верхней палубе судна при его эксплуатации, в том числе при отрицательных температурах наружного воздуха, а также в условиях обледенения судна.
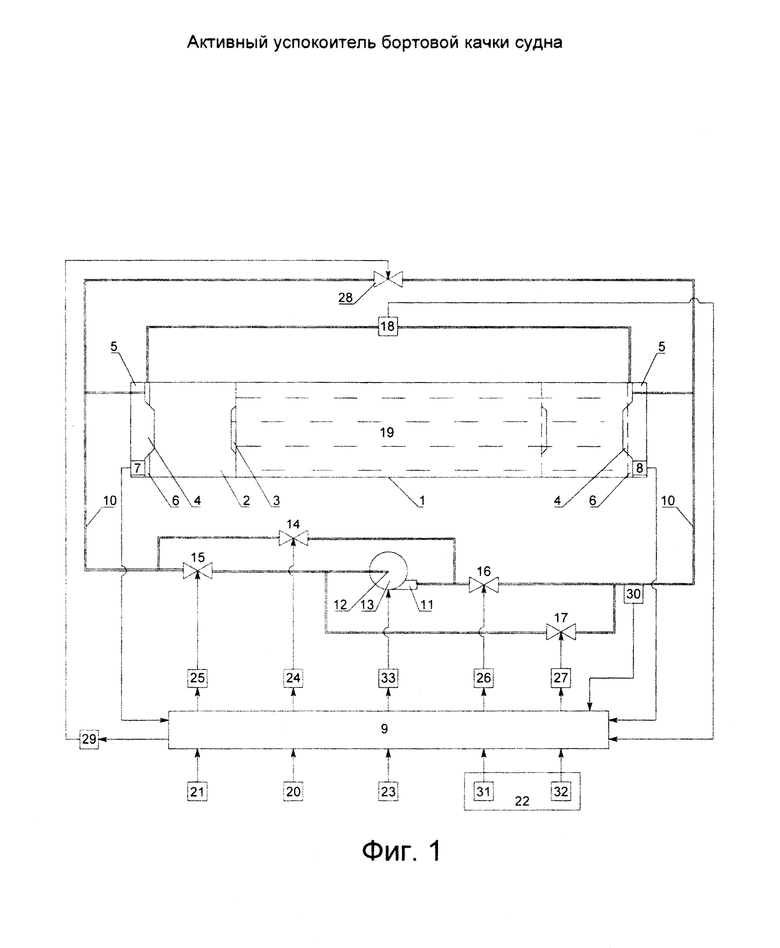
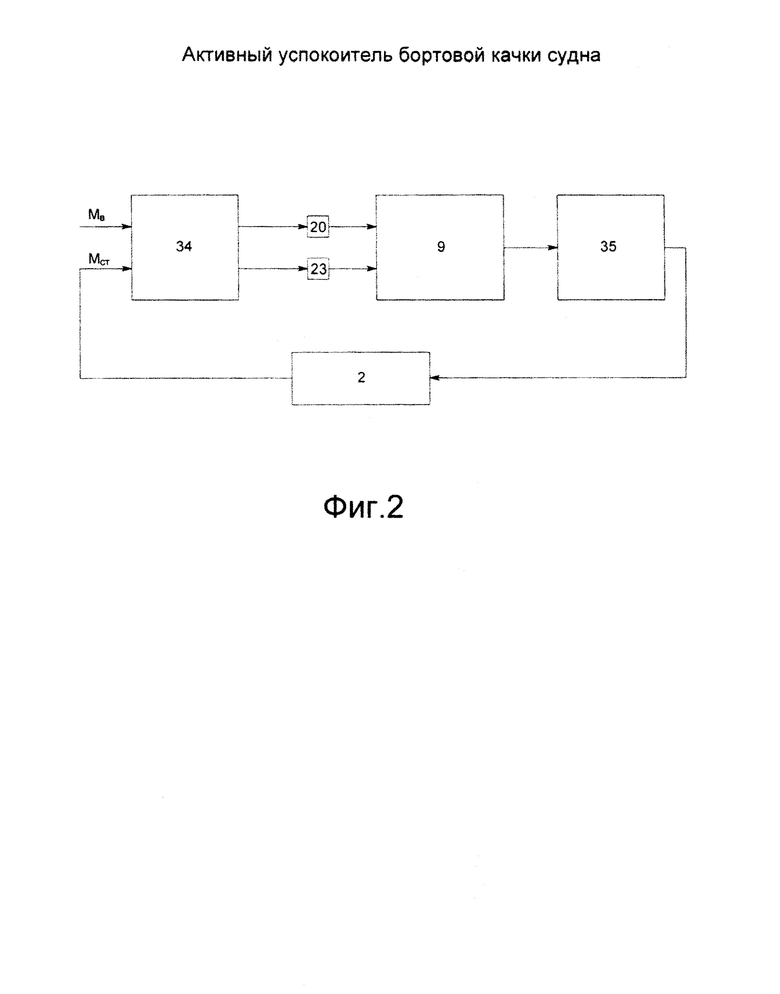
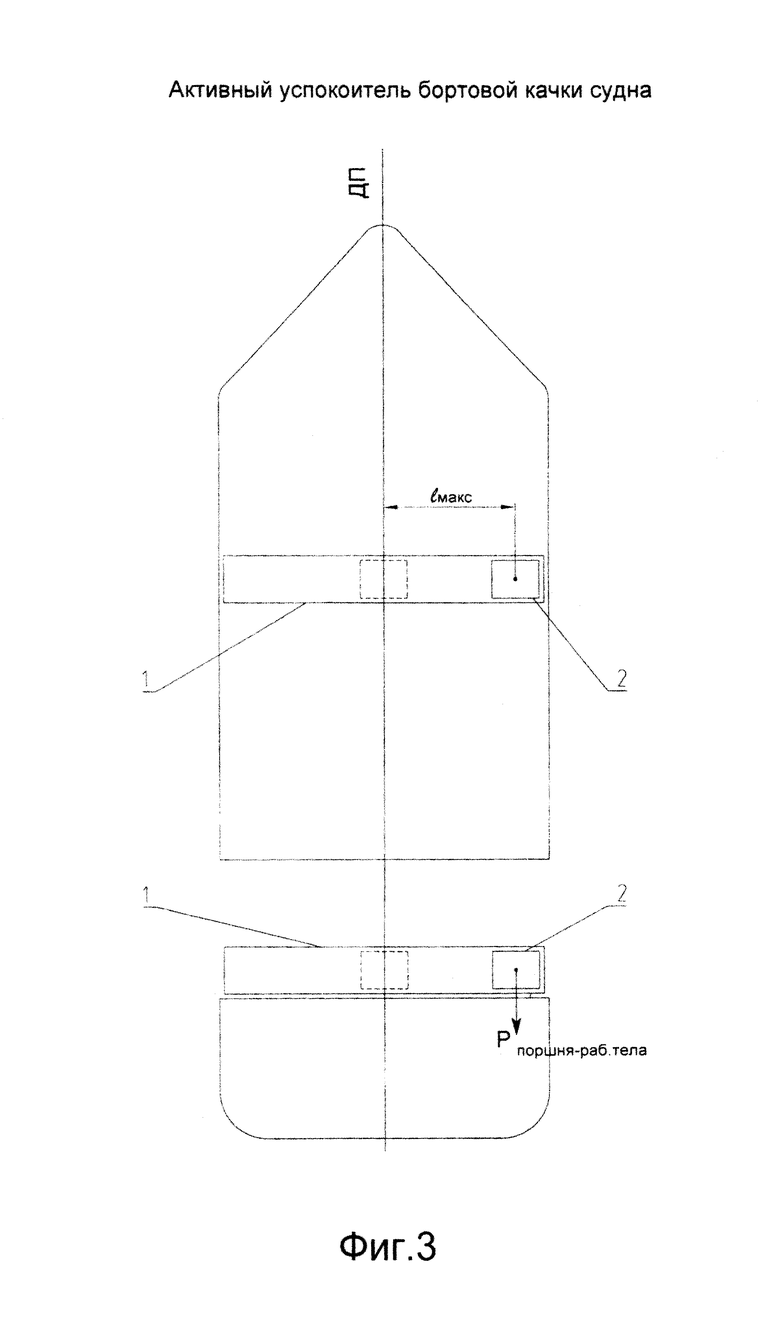
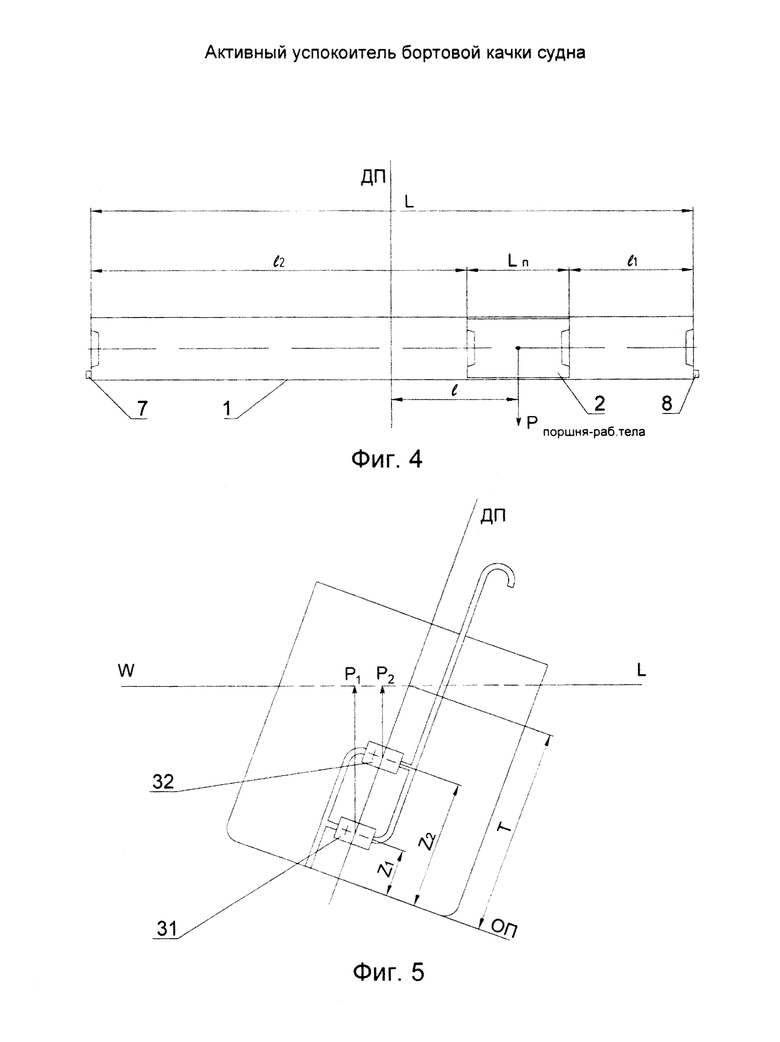
Сущность предлагаемого изобретения поясняется рисунками, где на фиг. 1 показана схема предлагаемого активного успокоителя бортовой качки судна, на фиг. 2 показана блок-схема успокоителя, на фиг. 3 - схема расположения на судне трубы-цилиндра с размещенным в нем поршнем-рабочим телом, на фиг. 4 - схема расположения ультразвуковых преобразователей положений поршня-рабочего тела в трубе-цилиндре и на фиг. 5 показана схема расположения на судне осадкомера.
Предлагаемый активный успокоитель бортовой качки судна (фиг. 1) содержит рабочее тело, выполненное в виде размещенного в расположенной поперек диаметральной плоскости судна трубе-цилиндре 1, являющейся направляющим устройством, поршня-рабочего тела 2, имеющего на своих торцах фиксирующие гнезда 3 под демпферы-фиксаторы 4 в торцах 5 трубы-цилиндра 1, выполненные с возможностью обеспечения щелевого зазора 6 между торцом поршня-рабочего тела 2 и внутренним торцом трубы-цилиндра 1.
Успокоитель включает также ультразвуковые преобразователи положений 7 и 8 перемещающегося в трубе-цилиндре 1 поршня-рабочего тела 2, расположенные в торцах 5 или оконечностях трубы-цилиндра 1, выходы которых соединены с входами вычислительного устройства 9. При этом пространство щелевого зазора 6 одной оконечности трубы-цилиндра 1 сообщено трубопроводом 10 с напорным 11 и засасывающим 12 патрубками введенного в состав успокоителя насоса 13 через электромагнитные клапаны 14 и 15, а другое аналогичное пространство сообщено трубопроводом 10 с напорным 11 и засасывающим 12 патрубками насоса 13 через другие аналогичные электромагнитные клапаны 16 и 17 (фиг. 1, 2).
При этом пространство щелевого зазора 6 одной из оконечностей трубы-цилиндра 1 сообщено трубкой малого диаметра с одним входом преобразователя разности давлений 18, а пространство щелевого зазора другой оконечности трубы-цилиндра 1 сообщено трубкой малого диаметра с другим его входом, электрический выход которого соединен с входом вычислительного устройства 9.
Труба-цилиндр 1 с поршнем-рабочим телом 2, трубопроводы 10 с электромагнитными клапанами 14, 15, 16, 17 и полости насоса 13, полости преобразователя разности давлений 18 и трубки малого диаметра, сообщаемые с его входами, при этом полностью заполнены рабочей жидкостью 19, имеющей удельный вес, существенно меньший удельного веса поршня-рабочего тела 2 (фиг. 1).
Успокоитель оснащен кренометром 20, дифферентометром 21, осадкомером 22 и преобразователем угловой скорости бортовой качки судна 23, выходы которых соединены с входами вычислительного устройства 9, а его выходы соединены с входами электромагнитных клапанов 14÷17 через согласующие устройства 24÷27, выполненные преимущественно в виде твердотельных реле с гальванической развязкой.
Осадкомер 22 может быть выполнен в виде двух преобразователей разности давлений 31 и 32 (фиг. 5), выходы которых соединены с входами вычислительного устройства 9, размещенных на одной нормали к основной плоскости судна, работающих одновременно, положительные входы которых сообщены с водным забортным пространством, а их отрицательные входы сообщены с атмосферой.
Согласующие устройства 24÷27 могут быть выполнены также в виде других дистанционно управляемых от вычислительного устройства 9 выключателей, пускателей, обеспечивающих включение или выключение электромагнитных клапанов 14÷17.
Насос 13 успокоителя может быть выполнен с регулируемой производительностью.
Внутреннее пространство щелевых зазоров 6 трубы-цилиндра 1 через торцы 5 сообщено между собой трубопроводом 10 через регулируемый электромагнитный клапан (вентиль) 28, электрический вход которого через согласующее устройство 29 соединен с выходом вычислительного устройства 9.
На трубопроводе 10 (или на трубе-цилиндре 1) может быть установлен преобразователь для контроля температуры 30 рабочей жидкости 19, выход которого соединен с входом вычислительного устройства 9.
В качестве рабочей жидкости 19 использована морозостойкая рабочая жидкость.
На блок-схеме успокоителя (фиг. 2) приведены: судно 34 с размещенным на нем успокоителем, кренометр 20, измеряющий мгновенные значения угла крена, преобразователь угловой скорости бортовой качки 23, вычислительное устройство 9, силовой следящий привод 35, исполнительный орган - поршень - рабочее тело 2. При этом силовой следящий привод 35 включает в себя клапаны 14÷17, 28, насос 13, включаемые через согласующие устройства 24÷27, 29 и 33 соответственно, рабочую жидкость 19, перемещаемую по трубопроводам 10, трубу-цилиндр 1, внутри которой перемещается исполнительный орган, которым является поршень-рабочее тело 2.
Активный успокоитель бортовой качки судна работает следующим образом:
По сигналам от вычислительного устройства 9, через согласующие устройства 24÷27 открываются клапаны 15 и 16 (или 14 и 17), через согласующее устройство 33 включается насос 13, перекачивающий рабочую жидкость 19, при этом открытый электромагнитный клапан (вентиль) 28 частично прикрывается, перепад давления на котором контролируется преобразователем разности давлений 18. Необходимый расход и перепад давления рабочей жидкости 19 на торцах поршня-рабочего тела 2 обеспечиваются насосом 13 и регулируемым клапаном (вентилем) 28. При этом по сигналам от кренометра 20, измеряющего мгновенные значения угла крена судна, преобразователя угловой скорости бортовой качки 23 этого судна, преобразователя разности давлений 18, ультразвуковых преобразователей положений 7 и 8, перемещающегося в трубе-цилиндре 1 поршня-рабочего тела 2, в вычислительном устройстве 9 вырабатывается сигнал Fy, управляющий силовым следящим приводом 34, который перемещает исполнительный орган - поршень-рабочее тело 2 в трубе-цилиндре 1 (фиг. 3). Если при этом поршень-рабочее тело 2 в трубе-цилиндре 1 перемещается до упора, то ответное фиксирующее гнездо 3 на рабочем теле 2 под демпфер-фиксатор 4 и демпфер-фиксатор 4, который выполнен на внутренней поверхности торцов 5 трубы-цилиндра 1, образуют фиксированный щелевой зазор 6 между торцом поршня-рабочего тела и внутренним торцом трубы-цилиндра. При этом выдавливаемая из фиксирующего гнезда 3 рабочая жидкость 19 смягчает удар поршня-рабочего тела 2 о торцы 5 трубы-цилиндра 1, а щелевой зазор 6 дает возможность отвести поршень-рабочее тело от торца 5 трубы-цилиндра 1 (фиг. 1).
Успокоитель работает по схеме непрерывного управления, при этом перемещение  исполнительного органа - поршня-рабочего тела 2 в пределах максимальной величины
исполнительного органа - поршня-рабочего тела 2 в пределах максимальной величины  пропорционально вырабатываемому вычислительным устройством 9 сигналу управления Fy (см. Шмырев А.Н. и др. Успокоители качки судна. Л.: Изд-во «Судостроение», 1972, с. 270, 288). При этом стабилизирующий момент Мст, который может создавать успокоитель, находится в пределах:
пропорционально вырабатываемому вычислительным устройством 9 сигналу управления Fy (см. Шмырев А.Н. и др. Успокоители качки судна. Л.: Изд-во «Судостроение», 1972, с. 270, 288). При этом стабилизирующий момент Мст, который может создавать успокоитель, находится в пределах:
 ,
,
где Рп и Vп - вес и объем поршня-рабочего тела 2 соответственно,
γж - удельный вес рабочей жидкости 19.
Текущее значение стабилизирующего момента, создаваемого успокоителем, находится из выражения:

где  - плечо, а (Рп - Vпγж) - разность силы тяжести поршня-рабочего тела 2 и силы тяжести рабочей жидкости, имеющей его объем.
- плечо, а (Рп - Vпγж) - разность силы тяжести поршня-рабочего тела 2 и силы тяжести рабочей жидкости, имеющей его объем.
При этом данная разность сил остается постоянной, а перемещая поршень-рабочее тело 2 на расстояние 1 пропорционально сигналу управления Fy, формируемого вычислительным устройством 9, получаем стабилизирующий момент. При этом Fy - сигнал, управляющий силовым следящим приводом 35, определяется из условия
 ,
,
где: К1 - коэффициент пропорциональности,
К2 и К3 - коэффициенты преобразования,
Θ - текущие значения угла крена судна,
 - текущие значения угловой скорости бортовой качки судна.
- текущие значения угловой скорости бортовой качки судна.
Перемещение  поршня-рабочего тела 2 в трубе-цилиндре 1 находим из условия (фиг. 4)
поршня-рабочего тела 2 в трубе-цилиндре 1 находим из условия (фиг. 4)
 - перемещение
- перемещение  , определяемое с помощью ультразвукового преобразователя положения 8 (выражение 1);
, определяемое с помощью ультразвукового преобразователя положения 8 (выражение 1);
 - перемещение , определяемое с помощью ультразвукового преобразователя положения 7 (выражение 2),
- перемещение , определяемое с помощью ультразвукового преобразователя положения 7 (выражение 2),
где L - расстояние между чувствительными элементами ультразвуковых преобразователей положений 7 и 8,
Lп - длина поршня-рабочего тела 2,
 - расстояние от чувствительного элемента ультразвукового преобразователя положения 8 до ближней к нему торцевой поверхности поршня-рабочего тела 2, измеряемое этим преобразователем,
- расстояние от чувствительного элемента ультразвукового преобразователя положения 8 до ближней к нему торцевой поверхности поршня-рабочего тела 2, измеряемое этим преобразователем,
 - расстояние от чувствительного элемента ультразвукового преобразователя положения 7 до другой торцевой поверхности поршня-рабочего тела 2, измеряемое этим преобразователем (фиг. 4).
- расстояние от чувствительного элемента ультразвукового преобразователя положения 7 до другой торцевой поверхности поршня-рабочего тела 2, измеряемое этим преобразователем (фиг. 4).
Ультразвуковые преобразователя положений 7 и 8 работают поочередно в связи с тем, что пространство трубы-цилиндра 1 разделено на два пространства поршнем-рабочим телом 2. При этом, когда в пространство со стороны преобразователя 8 (клапаны 15 и 16 открыты, клапаны 14 и 17 закрыты) насосом 13 нагнетается рабочая жидкость 19, в это же время из пространства с другой стороны поршня-рабочего тела 2 рабочая жидкость 19 им выдавливается и откачивается насосом 13 (по замкнутому контуру), а преобразователь 8 не используется (из-за значительной турбулентности в этом пространстве), используется преобразователь 7 (в этом пространстве турбулентности нет). При этом перемещение  определяется по выражению 2. Когда в пространство со стороны преобразователя 7 (клапаны 15 и 16 закрыты, а клапаны 14 и 17 открыты), насосом 13 нагнетается рабочая жидкость 19, в это же время из пространства с другой стороны поршня-рабочего тела 2 рабочая жидкость 19 им выдавливается и откачивается насосом 13 (по замкнутому контуру), а преобразователь 7 не используется, используется преобразователь 8 по тем же причинам. При этом перемещение
определяется по выражению 2. Когда в пространство со стороны преобразователя 7 (клапаны 15 и 16 закрыты, а клапаны 14 и 17 открыты), насосом 13 нагнетается рабочая жидкость 19, в это же время из пространства с другой стороны поршня-рабочего тела 2 рабочая жидкость 19 им выдавливается и откачивается насосом 13 (по замкнутому контуру), а преобразователь 7 не используется, используется преобразователь 8 по тем же причинам. При этом перемещение  определяется по выражению 1. Информация о том, какой преобразователь 7 или 8 в данное время необходимо использовать, определяется в вычислительном устройстве 9 по знаку разности давлений на поршне-рабочем теле 2, измеряемой преобразователем разности давлений 18.
определяется по выражению 1. Информация о том, какой преобразователь 7 или 8 в данное время необходимо использовать, определяется в вычислительном устройстве 9 по знаку разности давлений на поршне-рабочем теле 2, измеряемой преобразователем разности давлений 18.
Активный успокоитель бортовой качки судна по дополнительному назначению - в качестве автоматизированной системы кренования судна работает следующим образом.
По сигналу Fy от вычислительного устройства 9, поданному на силовой следящий привод 35, поршень-рабочее тело 2 в трубе-цилиндре 1 перемещается в одно из крайних положений. Когда накренение судна, обусловленное перемещением поршня-рабочего тела 2 в трубе-цилиндре 1, прекращается, начинается запись массивов данных на заданном интервале времени, получаемых по сигналам от кренометра 20, дифферентометра 21, преобразователей разности давлений 31 и 32 осадкомера 22. По этим данным в вычислительном устройстве 9 определяются равновесные значения угла крена Θ1, угла дифферента Ψ и осадки Т, а с использованием данных о наружной поверхности корпуса судна определяются объемное V и весовое водоизмещение D.
После прекращения записи указанных массивов данных на заданном интервале времени по сигналу Fy от вычислительного устройства 9, поданному на силовой следящий привод 35, поршень-рабочее тело 2 в трубе-цилиндре 1 перемещается в другое крайнее положение.
При этом опять начинается запись массивов данных на заданном интервале времени, получаемых по сигналам от кренометра, дифферентометра, преобразователей разности давлений осадкомера. По этим данным в вычислительном устройстве 9 также определяются равновесные значения угла крена Θ2, угла дифферента Ψ и осадки Т, а с использованием данных о наружной поверхности корпуса судна подтверждается весовое водоизмещение D.
При этом кренящий момент вычисляется в вычислительном устройстве 9 из условия

где Θ0 - равновесное значение угла крена судна.
При этом изменение угла крена ΔΘ=Θ2-Θ1, обусловленное этим кренящим моментом, будет находиться ориентировочно в пределах 2-4 градусов, при максимально разрешенном для этого судна водоизмещении D и при минимально разрешенном для него значении поперечной метацентрической высоты h.
Поперечная метацентрическая высота h при этом определяется по формуле
h=Mкр/(D⋅sinΔΘ)
где ΔΘ=Θ2-Θ1 - изменение угла крена в градусах;
Θ1 - угол крена судна (по сигналу от кренометра) при положении поршня-рабочего тела 2 в одном из крайних положений в трубе-цилиндре 1;
Θ2 - угол крена судна (по сигналу от кренометра) при положении поршня-рабочего тела 2 в другом из крайних положений в трубе-цилиндре 1;
D - весовое водоизмещение судна при определении поперечной метацентрической высоты.
Осадка Т0 в месте установки осадкомера вычисляется по следующей формуле:

где Z1 - аппликата нижнего преобразователя разности давлений 31 осадкомера 22;
Z2 - аппликата верхнего преобразователя разности давлений 32 осадкомера 22;
P1, Р2 - текущие значения давлений, измеряемых преобразователями разности давлений 31 и 32 соответственно.
С целью повышения точности определения начальной поперечной метацентрической высоты h при однократном креновании (особенно в условиях качки на волнении) его необходимо выполнять многократно, а полученные при этом значения hi необходимо усреднять, например, методом скользящего среднего.
Проверка опытного образца автоматизированной системы кренования судна (см. патент РФ №2522671), изготовленного в виде моноблока, установленного на верхней палубе среднего рыбопромыслового судна, испытанного в натурных условиях, как в летнее, так и в зимнее время (при отрицательных температурах), как на спокойной воде, так и при качке на нерегулярном волнении, подтвердила работоспособность указанной системы, ее достаточные быстродействие и точность определения параметров поперечной остойчивости судна, простоту эксплуатации.
Предлагаемый активный успокоитель бортовой качки судна обеспечивает повышение надежности его работы в эксплуатационных и аварийных условиях, преимущественно в условиях отрицательных температур, безопасности персонала при его использования на судне и возможности компактного размещения на палубе судна при одновременной возможности его использования в качестве автоматизированной системы контроля поперечной остойчивости - поперечной метацентрической высоты судна, что его выгодно отличает от прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОСАДКИ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА В НАДВОДНОМ ПОЛОЖЕНИИ В УСЛОВИЯХ КАЧКИ | 1997 |
|
RU2116929C1 |
| Успокоитель качки судна | 1982 |
|
SU1030252A1 |
| Успокоитель бортовой качки судна | 1979 |
|
SU880873A1 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОСАДКИ ПЛАВУЧЕГО СРЕДСТВА НА ВОЛНЕНИИ | 2017 |
|
RU2668003C1 |
| Пассивный успокоитель качки плавающего средства | 2017 |
|
RU2717402C2 |
| СТАТОДИНАМИЧЕСКИЙ КРЕНОМЕТР | 1992 |
|
RU2057679C1 |
| Успокоитель качки судна | 1988 |
|
SU1527090A1 |
| УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ | 1970 |
|
SU282953A1 |
Изобретение относится к области судостроения и касается вопроса создания технических средств успокоения бортовой качки судна на волнении. Предложен активный успокоитель бортовой качки судна с рабочим телом в виде поршня, перемещаемого в трубе-цилиндре, приведена схема успокоителя качки с указанием всех необходимых элементов и связей между ними, обеспечивающих его работу. Предложенное изобретение способствует повышению надежности работы успокоителя в эксплуатационных и аварийных условиях, преимущественно в условиях отрицательных температур, обеспечению безопасности персонала при его использовании на судне и компактности его размещения на палубе судна при одновременном обеспечении возможности его использования в качестве автоматизированной системы контроля поперечной остойчивости - поперечной метацентрической высоты судна. 5 з.п. ф-лы, 5 ил.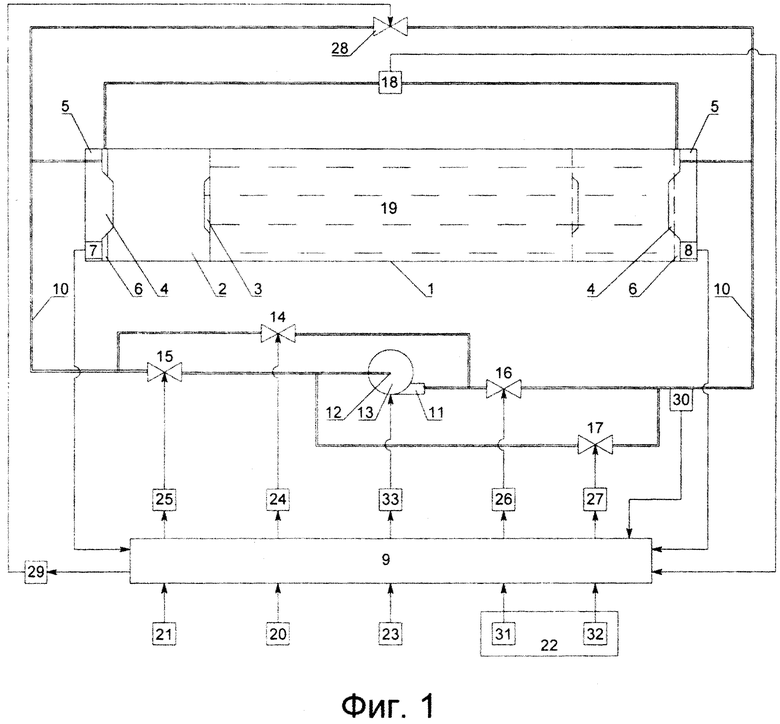
1. Активный успокоитель бортовой качки судна, включающий рабочее тело с известными массой и положением его центра тяжести, перемещаемое по направляющему устройству с помощью следящего привода, управляемого вычислительным устройством, в обе стороны поперек судна на задаваемые вычислительным устройством расстояния, преобразователи положений перемещаемого рабочего тела, кренометр и преобразователь угловой скорости бортовой качки судна, отличающийся тем, что рабочее тело выполнено в виде поршня, размещенного в расположенной поперек диаметральной плоскости судна трубе-цилиндре, имеющего на своих торцах ответные фиксирующие гнезда под демпферы-фиксаторы, которые расположены на внутренних торцах трубы-цилиндра и установлены с возможностью обеспечения зазора между торцом поршня-рабочего тела и внутренним торцом трубы-цилиндра, причем пространство щелевого зазора одной оконечности трубы-цилиндра сообщено трубопроводом через электромагнитные клапаны с напорным и засасывающим патрубками введенного в состав устройства насоса, а пространство щелевого зазора другой ее оконечности сообщено трубопроводом также с засасывающим и напорным патрубками насоса через другие электромагнитные клапаны, при этом пространство упомянутого щелевого зазора одной из оконечностей трубы-цилиндра сообщено с одним входом введенного в состав устройства преобразователя разности давлений, а пространство щелевого зазора другой оконечности трубы-цилиндра сообщено с его другим входом, а электрический выход указанного преобразователя соединен с входом вычислительного устройства, причем труба-цилиндр с поршнем-рабочим телом, трубопроводы с электромагнитными клапанами и полости насоса при этом полностью заполнены рабочей жидкостью, имеющей удельный вес, меньший удельного веса поршня-рабочего тела, при этом работающие поочередно преобразователи положений перемещающегося в трубе-цилиндре поршня-рабочего тела расположены в торцевых оконечностях трубы-цилиндра, причем в качестве этих преобразователей использованы преимущественно ультразвуковые преобразователи, выходы которых, а также выходы кренометра и преобразователя угловой скорости бортовой качки судна соединены с входами вычислительного устройства, с выходами которого соединены входы электромагнитных клапанов и насоса через согласующие устройства, выполненные преимущественно в виде твердотельных реле.
2. Активный успокоитель бортовой качки судна по п. 1, отличающийся тем, что пространства щелевых зазоров каждой из оконечностей трубы-цилиндра сообщены между собой трубопроводом через регулируемый электромагнитный клапан, электрический вход которого через согласующее устройство соединен с выходом вычислительного устройства.
3. Активный успокоитель бортовой качки судна по п. 1, отличающийся тем, что в трубопроводе гидравлического привода или в трубе-цилиндре установлен преобразователь температуры жидкости, выход которого соединен с входом вычислительного устройства.
4. Активный успокоитель бортовой качки судна по п. 1, отличающийся тем, что насос выполнен с регулируемой производительностью.
5. Активный успокоитель бортовой качки судна по п. 1, отличающийся тем, что в качестве рабочей жидкости использована морозостойкая рабочая жидкость.
6. Активный успокоитель бортовой качки судна по п. 1, отличающийся тем, что он оснащен дифферентометром и осадкомером, причем осадкомер выполнен в виде двух преобразователей разности давлений, расположенных на одной нормали к основной плоскости судна, работающих одновременно, положительные входы которых сообщены с водным забортным пространством, а их отрицательные входы сообщены с атмосферой, при этом выходы дифферентометра и упомянутых преобразователей разности давлений соединены с входами вычислительного устройства.
| JP H06144366 A, 24.05.1994 | |||
| CN 204264427 U, 15.04.2015 | |||
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| Способ получения половых продуктов у самок рыб карповых пород | 1984 |
|
SU1214037A1 |

