Изобретение относится к контрольно-измерительной технике для бесконтактного определения линейных и углового положений объекта.
Изобретение может быть использовано для измерения координат и линейных и углового перемещений точек на испытуемом объекта, доступ к которым затруднен с помощью других измерительных средств.
В настоящее время известны устройства для одновременного измерения линейных и углового перемещений испытуемых объектов (SU, авт. св. 1585679, кл. G 01 B 21/00, БИ N 30, 1990). В этих устройствах на испытуемом объекте жестко закрепляется маска, работающая на просвет, кроме того, в устройстве применен специальный фотопотенциометр.
Наиболее близким по технической сущности к изобретению является способ определения углового положения объекта, реализованный в устройстве для измерения углового положения объекта, заключающийся в том, что на объект наносят метку и сканируют изображение пространства с этой меткой, определяют угловое положение метки и получают информацию об угловом положении объекта по положению метки (SU, авт. св. 916975, кл. G 01 B 11/26, БИ N 12, 1982).
Описанный способ пригоден только для определения углового положения метки, а следовательно и объекта.
Изобретение решает задачу расширения функциональных возможностей способа измерения положения объекта.
Указанная задача достигается тем, что способ, заключающийся в том, что на объект наносят метку и сканируют изображение пространства с этой меткой, выделяют видеосигналы, соответствующие местам пересечения точки сканирования со сторонами метки, и получают информацию по координатам положения метки; используют метку, представляющую собой две оптически контрастные окружности, причем вторая окружность с диаметром, равным радиусу первой окружности, касается первой в одной точке, регистрируют полученные при однострочном сканировании видеосигналы от пересечения точки сканирования с окружностями, по координатам которых судят о линейных и угловой координатах центра метки в относительной системе координат. При расположении второй окружности внутри первой, принимая за центр метки центр первой окружности, и при проецировании изображения метки оптической системой на линейку фотоприемника, начало линейки которого является центром системы координат, ось X которой расположена вдоль линейки фотоприемника, эти координаты вычисляют по формуле:
где
R - радиус первой окружности;
h - шаг между элементами линейки фотоприемника;
Г - линейное увеличение оптической системы;
X1. . . X4 - номера элементов линейки фотоприемника с максимальной облученностью.
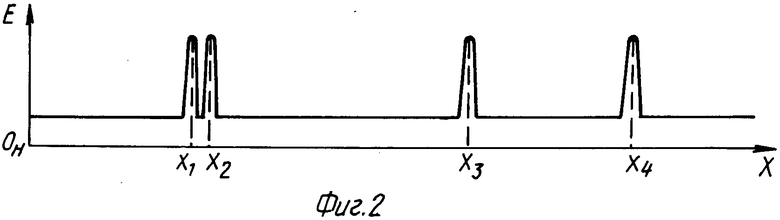
На фиг. 1 изображены метки на плоскости линейки фотоприемника; фиг. 2 - форма видеосигнала с линейки фотоприемника, где 1 - изображение первой окружности; 2 - изображение второй внутренней окружности; 3 - линейка фотоприемника, являющаяся осью X1; Ом - центр первой окружности, являющийся центром метки; О1 - центр второй окружности; Ок - точка касания окружности; Он - начало линейки 3, являющееся центром осей координат X и Y; Xм и Yм - координаты центра метки Ом в осях X и Y; Ок О1 Ом - линия, служащая для определения углового положения (γM) метки относительно оси ОнX; R - радиус первой окружности; E - облученность элементов линейки фотоприемника; X1...X4 - номера элементов линейки фотоприемника с максимальной облученностью.
Изображение пространства, в котором расположена метка, проецируется с помощью оптической системы на линейный фотоприемник 3, расположенный в плоскости, параллельной плоскости метки. Изображение метки накладывается на фотоприемник 3, представляющий прямую линию так, как показано на фиг. 1. Вследствие оптически контрастной метки (обычно белого цвета на черном фоне) облученность E фотоприемника представляет вид (фиг. 2) с четырьмя наиболее облученными участками. Линейный фотоприемник 3 рассматривается как линейка, состоящая из отдельных фотоприемных элементов. Элементы линейки фотоприемника с максимальной облученностью имеют координаты X1, X2, X3, X4 при отсчете от начала линейки Он. Вышеуказанные координаты определяются номерами X1.. .X4 элементов линейки фотоприемника с максимальной облученностью.
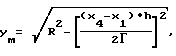
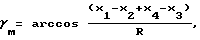
Исходя из геометрических соотношений (фиг. 1), выводятся формулы для определения линейных и углового положения метки на испытуемом объекте: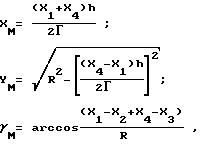
где
Г - линейное увеличение оптической системы.
Величины R и h считаются известными, а величина Г зависит от расстояния между меткой и оптической системой и изменяется при фокусировке оптической системы. Величина Г определяется из выражения  , когда его правая часть достигает максимума при настройке устройства путем его перемещения по оси Y.
, когда его правая часть достигает максимума при настройке устройства путем его перемещения по оси Y.
Как следует из фиг. 1, диапазон Δ X9 измеряемых перемещений по оси X зависит от координаты Y и лежит в пределах  , где L - длина линейки 3.
, где L - длина линейки 3.
Диапазон Δ Y9 измерения по оси Y лежит в пределах от 0,4R (примерно) до R, а в диапазоне от 0 до 0,4R, как показывают расчеты, получаются значительные погрешности измерений.
Диапазон измеряемых углов γM лежит в пределах 0 - 180o.
Предполагаемое изобретение можно использовать для измерения линейных и угловой координат любой точки N перемещающегося объекта, недоступной для наблюдений и расположенной на расстоянии lON от центра метки Ом и под углом αM к линии ОкО1Ом метки. В этом случае координаты точки N определяются по формулам:
где
βN= γM-αM - угол между осью X и прямой, соединяющей центр метки Ом и точку N.
Одновременное измерение линейных и угловой координат точек исследуемого объекта позволит упростить контрольно-измерительную аппаратуру по сравнению с другими способами и средствами.
При измерении положения объекта на него наносят метку. Метка представляет собой две оптически контрастные окружности. Вторая окружность с диаметром, равным радиусу первой окружности, касается первой в одной точке. Регистрируют полученные при однострочном сканировании видеосигналы от пересечения точки сканирования с окружностями. По координатам видеосигналов судят о линейных и угловой координатах центра метки в относительной системе координат. Изобретение расширяет функциональные возможности способа измерения положения объекта. 1 з.п. ф-лы, 2 ил.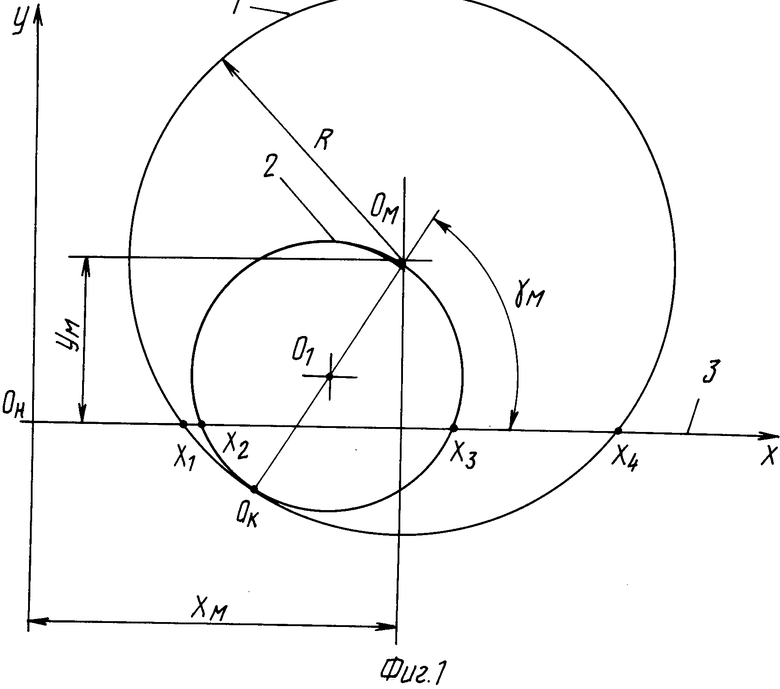
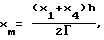
где R - радиус первой окружности;
h - шаг между элементами линейки фотоприемников;
Г - линейное увеличение оптической системы;
x1. . . x4 - номера элементов линейки фотоприемника с максимальной облученностью.
| SU, авторское свидетельство, 916975, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
