Изобретение относится к области навигации, а именно к локационным способам обнаружения, регистрации и сопровождения наземных объектов, морских и воздушных судов, космических аппаратов и тел.
Известен способ, в котором для увеличения точности измерения координат используют апертурную обработку сигналов нескольких приемных систем, разнесенных в пространстве (радиоинтерферометрия с длинной базой (РДБ), или со сверхдлинной базой (РСДБ)) (см. Справочник по радиолокации. Под. ред. М. Скольник. М., Советское радио. 1977. стр. 337-362).
Он включает обработку сигналов по специальному алгоритму на несущей частоте. Технические и математические сложности обработки радиосигналов в фазовом пространстве, для которой необходимо измерение спектра в широкой полосе, существенно ограничивают производительность этого способа и, фактически, исключают возможность работы в режиме реального времени, что важно при навигационных измерениях управляющими радиолокационными станциями. Эта же причина ограничивает область применения методов неподвижными объектами. Кроме того, разнесение антенн на большие расстояния, обеспечивающие получение высокой точности и необходимость использования дорогостоящей сверхточной аппаратуры синхронизации и согласования сигналов во времени на несущей частоте, существенно ограничили область применения метода апертурной обработки сигналов топографическими съемками местности и небесной сферы. При этом измеряется только VD - составляющая скорости вдоль приемной системы по допплер-эффекту отдельными приемными системами. Этого недостаточно для определения полного вектора скорости  .
.
Техническая задача - создание способа, позволяющего увеличить производительность и точность измерения координат и вектора скорости, снизить стоимость и увеличить чувствительность за один пролет зоны видимости.
Технический результат - увеличение производительности и точности одновременного измерения координат и вектора скорости объектов локационным методом.
Он достигается тем, что облучение объекта и регистрация отраженного эхо-сигнала осуществляется тремя независимыми идентичными каналами, размещенными в одной неподвижной приемной системе (а не в нескольких), ДН (поля зрения) которых частично перекрываются, осуществляется измерение длительности видеосигналов (а не частотного спектра) в каждом из каналов и временного сдвига их друг относительно друга, производится вычисление координат участка траектории объекта в картинной плоскости азимутальной составляющей скорости Vϕ, и расчет по ним вектора полной скорости с учетом радиальной составляющей скорости VD и координат.
Перечень чертежей:
Фиг. 1. Схема способа прецизионной регистрации объектов. АИ - излучающая антенна (лазерная для оптического диапазона), AП - приемная антенная система (оптический телескоп) содержащая три приемных канала, V - скорость объекта γ - угол наклона траектории к картинной плоскости (КП), ABCDEF - след траектории объекта.
Таблица 1. Зависимость мощности сигнала облучения от времени.
Таблица 2. Пример временной зависимости эхо-сигнала в первом канале.
Таблица 3. Пример временной зависимости эхо-сигнала во втором канале.
Таблица 4. Пример временной зависимости эхо-сигнала в третьем канале.
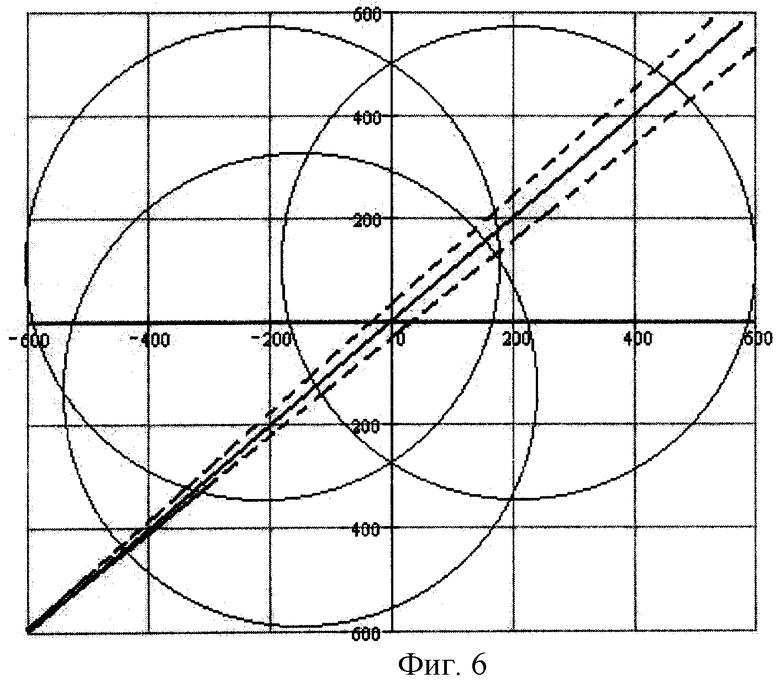
Фиг. 2. Траектории объекта в картинной плоскости
 истинная траектория
истинная траектория
 траектории, отличающиеся от истинной из за ошибки измерения времени на ±0.1%.
траектории, отличающиеся от истинной из за ошибки измерения времени на ±0.1%.
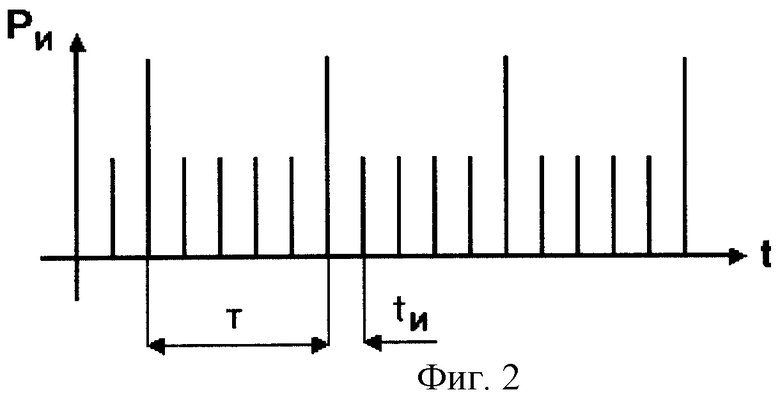
Наиболее важно и наглядно применение этого метода для радиолокации. Реализация способа в радиодиапазоне представлена на фиг. 1. Зондирующий радиоимпульс РИ излучают антенной АИ. Временная зависимость мощности сигнала представлена в таблице 1, где tИ - период колебаний, соответствующий несущей частоте, τ - период амплитудной модуляции по доплеровскому сдвигу которого определяют VD. Эхо-сигнал принимают приемной антенной системой АП, содержащий три канала, центры диаграмм направленности которых разнесены в (КП) и частично пересекаются, как показано на фиг.1.
Сигнал отражается объектом, траектория которого наклонена к КП под углом γ и может быть представлена отрезком прямой, след ABCDEF которой на картинную плоскость описывается уравнением

где а - угловой коэффициент прямой; b - отрезок, отсекаемый прямой на оси OY.
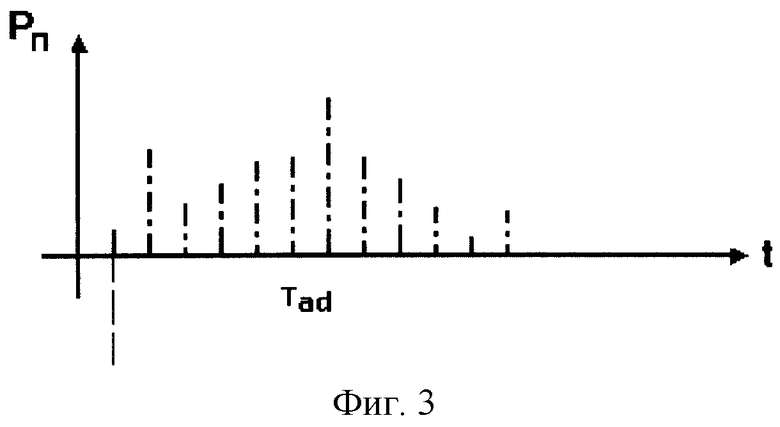
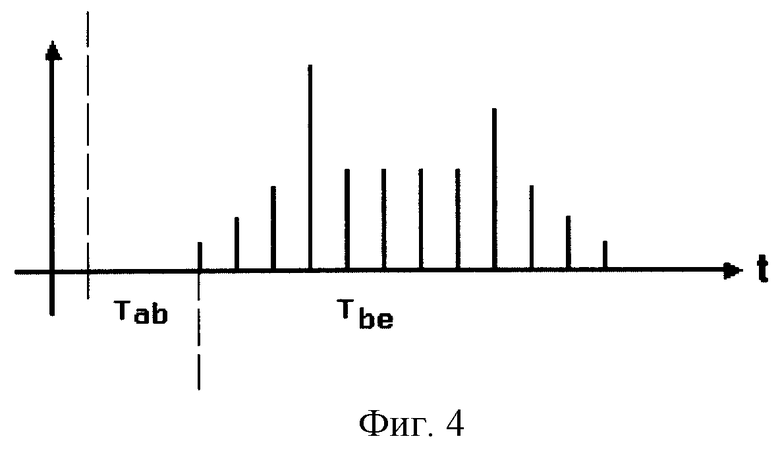
Временная зависимость эхо-сигналов в каналах показана в таблицах 2, 3, 4. Начало и конец импульсов, представляющих эти сигналы, соответствуют точкам пересечения следа траектории и окружностей радиуса R (для полностью идентичных каналов), которые получаются сечением диаграмм направленности картинной плоскостью. Уравнения окружностей в картинной плоскости:



где k и m - смещение центров окружности относительно осей Х и Y системы координат, выбранной в КП произвольно. Начало и ориентацию этой системы определяют по положению радиоосей каналов, калибровкой по радиоисточникам. Совместно с уравнениями проекции следа траектории ABCDEF на ось ОХ: Vϕ·(τi-τj)·(1+a2)1/2=хi-xj(i,j= ABCDEF) выражения (2 - 4) составляют систему, связывающую времена τi,j=(τi-τj) с неизвестными составляющими скорости Vx, Vy, координатами объекта и радиусом ДН в картинной плоскости. Эта система имеет простое аналитическое решение:




где τEF, τFC, τEB, τED, τDA - интервалы времени, в течение которых проекция объекта на картинную плоскость находится на интервалах, ограниченных точками Е и F, F и С, Е и В, Е и D, D и A; x0, у0 - координаты объекта.
Простота выражений обеспечивает высокую производительность расчёта в сравнении с прототипом, так как обрабатывается видеосигнал, а не весь частотный спектр.
Измеряют времена τi, τj и их временной сдвиг друг относительно друга, подставляют их в уравнения (5-8) и находят Vx, Vy уравнения траектории (7). По координатам радиооси и места расположения приемной антенной системы с использованием наклонной дальности и составляющей скорости VD рассчитывают полный набор параметров: вектор полной скорости  , и координаты объекта.
, и координаты объекта.
Очевидно, что точность расчёта этих величин полностью определяется погрешностью измерения времён и значениями k и m. На фиг. 1 видно, что при увеличении k и m уменьшается площадь обзора (заштрихована), но при этом уменьшается амплитуда сигнала (чувствительность антенны падает к краю ДН) и соответственно ухудшается точность измерения времён.
При оптимальном выборе k и m координаты будут определены с точностью (ΔX, ΔY)<<R. Так, если точность определения угловых координат объекта (от которых можно легко перейти к декартовым): азимута ϕ, угла места β, определяется шириной диаграммы направленности θ, то при использовании данного метода погрешность определяется как θЭФФ=ηθ, где η<<1 и является функцией, не выражаемой аналитически. Эта функция зависит от разноса ДН, точности измерения длительности сигнала и рассчитывается по форме ДН. В таблице 1 показан пример результата расчёта траекторий по экспериментальным данным, полученным на специальном стенде (см. Никитин О.Ю., Сорокин А.Ф., Томилин Ю.Г., Цюх А.М. «О возможности определения ориентационных характеристик космических объектов». Сборник трудов 5-й Международной конференции «Системный анализ и управление космическими комплексами. Исследование и освоение космоса в наступающем веке». Евпатория, 2000, с.32). Граничные траектории соответствуют ошибкам в определении времени 0.1%, (k/R, m/R)=0.3. Видно, что погрешность измерения координат уменьшается в 100 раз в сравнении с измерениями обычной антенной. Например, при регистрации эхо-сигнала дисковой антенной диаметром 100 метров (Боннский радиотелескоп), на длине волны 5 см погрешность составила ±1.8 угловых минуты, при использовании данной методики она составит 0.2 угловых секунды. Другими словами, при заданной точности измерения применение данного способа позволяет использовать антенны меньших размеров, что особенно важно для бортовой аппаратуры в аэрокосмических применениях. Так как, обычно, фокальное пятно антенных систем существенно превышает размеры апертуры облучателей, установка трёх каналов увеличивает чувствительность радиолокационного метода.
В оптическом диапазоне сложность обработки сигналов ПЗС матриц, представляющих фактически многоканальную приёмную систему, не позволяет осуществлять регистрацию движущихся объектов в режиме реального времени. Использование данного способа в оптическом диапазоне позволяет определять координаты объектов по измерениям в областях спектра, для которых отсутствуют приёмники с позиционированием - УФ, далёкий ИК и рентгеновский.
При обследовании объекта, излучающего в радиодиапазоне, приём сигналов ведут на частоте, соответствующей максимуму его излучения, так что отпадает необходимость использования зондирующего импульса.
Объект изобретения: локационный способ прецизионного измерения координат и вектора скорости отражающего объекта для дистанционного определения координатной информации отражающих объектов при обнаружении регистрации наземных объектов, морских и воздушных судов, космических аппаратов и тел. Суть изобретения заключается в том, что отраженный от объекта эхо-сигнал регистрируется тремя каналами приемной системы, центры зон видимости каждого канала разнесены в картинной плоскости так, что сами они частично перекрываются, измеряются длительности и временные сдвиги сигналов в трех каналах и по ним рассчитываются координаты и вектор скорости объекта в картинной плоскости. По положению оси приемной системы с учетом измеренных наклонной дальности и радиальной скорости рассчитываются координаты объекта в обычной системе координат. При регистрации излучающих объектов способ осуществляют на частоте, соответствующей максимуму его излучения. Достигаемый технический результат - увеличение точности измерения координат и вектора скорости объекта. 6 ил.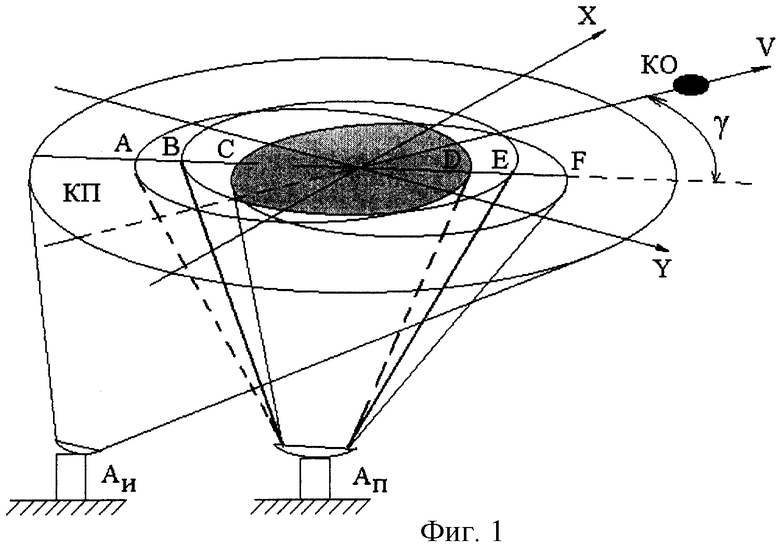
Способ прецизионного измерения навигационных параметров объекта, включающий облучение его зондирующим радиоимпульсом, прием отраженного от объекта эхо-сигнала с последующим его анализом и расчетом координат объекта и его полного вектора скорости, отличающийся тем, что эхо-сигнал, возникающий при пересечении объектом зоны видимости, принимают тремя идентичными независимыми каналами, размещенными в одной приемной системе, центры диаграмм направленности каналов разносят в картинной плоскости на расстояния, определяемые заданной точностью, так, что диаграммы направленности каналов частично перекрывают друг друга, измеряют длительности видеосигналов в каждом из трех каналов и их временной сдвиг относительно друг друга, при этом начало и конец импульсов, представляющих эти видеосигналы, соответствуют точкам пересечения следа траектории ABCDEF объекта и окружностей радиуса R, получаемых сечением диаграмм направленности каналов картинной плоскостью, составляют систему уравнений


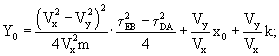

где - Vx, Vy - составляющие полного вектора скорости, x0, y0 - координаты объекта, R - радиус окружности в картинной плоскости, полученной сечением диаграмм направленности каналов картинной плоскостью, k и m - смещение центров полученных окружностей относительно осей X, Y системы координат в картинной плоскости, при этом начало и ориентацию этой системы определяют по положению радиоосей каналов калибровкой по радиоисточникам, τEF, τFC, τEB, τED, τDA - временные сдвиги видеосигналов в каждом из трех каналов относительно друг друга, соответствующие точкам пересечения проекции следа траектории ABCDEF на ось ОХ системы координат в картинной плоскости и окружностей радиуса R, используя данную систему уравнений, радиальную составляющую скорости VD и азимутальную составляющую скорости Vϕ рассчитывают полный вектор скорости объекта V=(V2 D+V2 ϕ)0.5, Vϕ=(V2 X+V2 Y)0.5 и координаты объекта x0, y0.
| Справочник по радиолокации | |||
| Под ред | |||
| СКОЛНИКА M., Москва, Советское радио, 1977, с.337-362 | |||
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
| ПРЕЦИЗИОННАЯ СИСТЕМА ПОСАДКИ ДЛЯ НАВЕДЕНИЯ САМОЛЕТА ВДОЛЬ ЗАДАННОЙ ПОСАДОЧНОЙ ТРАЕКТОРИИ В ПРЕДЕЛАХ РАДИУСА ДЕЙСТВИЯ НАЗЕМНОГО ЗАПРОСЧИКА (ВАРИАНТЫ) | 1992 |
|
RU2100820C1 |
| RU 2059205 C1, 27.04.1996 | |||
| Графитизирующаяся сталь для фасонного литья и способ термической обработки фасонных изделий из нее | 1947 |
|
SU70364A1 |
| US 6414632 B1, 02.07.2002 | |||
| DE 19756364 A1, 24.06.1999. | |||

