Изобретение относится к электротехнике, в частности к противоаварийной автоматике энергосистем, и может быть использовано, например, в автоматике ликвидации асинхронного режима (АЛАР).
Известен способ [1], основанный на фиксации факта перехода фазового угла ϕ между напряжением и током в контролируемой точке электропередачи из одной заданной зоны в другую при условии, что угол δ между векторами  электродвижущих сил (ЭДС) по концам электропередачи существенно отличен от 0 и близок к 180o.
электродвижущих сил (ЭДС) по концам электропередачи существенно отличен от 0 и близок к 180o.
Недостатками этого способа являются низкие селективность и устойчивость функционирования из-за зависимости ϕ от изменения угла ϕэ эквивалентного угла сопротивления электропередачи в пределах (60 - 110)o при жесткой связи границы упомянутого перехода угла ϕ с некоторым установленным значением ϕэ , а также из-за фиксации факта АР в зоне неопределенных значений ϕ(δ ≈ 180°) . Кроме того, известный способ не позволяет использовать информативность ϕ в отношении размещения электрического центра качаний (ЭЦК) относительно контролируемой точки и знака взаимного скольжения S векторов  для выработки оптимальных управляющих воздействий.
для выработки оптимальных управляющих воздействий.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому способу является способ выявления АР, свободный от отмеченных выше недостатков [2]. Согласно этому способу вычисляют приращение Δϕ фазового угла ϕ в интервале времени Δt между моментами t1 и t2 с одинаковыми значениями другого режимного параметра в цикле его колебаний, например, тока электропередачи. При этом значения δ1 и δ2 угла δ , соответствующие моментам t1 и t2 при синхронных качаниях (СК), одинаковы, а Δϕ равно 0, в то время как в АР δ2= (360°-δ1) и приращению Δδ = δ2-δ1 соответствует приращение Δϕ , существенно отличное от 0o [2, фиг. 2 и 3].
Выявление АР производится при
где - абсолютное значение Δϕ; ϕбл - угол блокировки, устанавливающий границу раздела между СК и АР с учетом нестабильности параметров электропередачи [2, фиг. 1] и погрешностей реализации способа.
- абсолютное значение Δϕ; ϕбл - угол блокировки, устанавливающий границу раздела между СК и АР с учетом нестабильности параметров электропередачи [2, фиг. 1] и погрешностей реализации способа.
Главные достоинства способа, обусловливающие высокий уровень его селективности и устойчивости функционирования, проявляются в отсутствии зависимости параметра распознавания Δϕ от ϕэ и изменения частот ωu и ωi контролируемых напряжения и тока. При этом разность Δω логично использовать в качестве основного признака возникновения колебательного процесса при вычислении Δϕ :
Вместе с тем, известному способу присущи следующие недостатки:
1. Невозможность установить факт размещения ЭЦК внутри заданной зоны, а также слева или справа от нее, что ограничивает селективность и сужает спектр и эффективность управляющих воздействий.
2. Сильная зависимость δϕ от соотношения k и α [2, фиг. 3], при которой Δϕ может изменяться в диапазоне от 75 до 200o при 0,2<α<0,8 , что ухудшает устойчивость функционирования и отстройку от СК и внешнего АР.
Задачей, на решение которой направлено заявленное предложение, является повышение селективности и устойчивости функционирования, а также расширение возможностей по управлению режимом электропередачи. Получаемый при этом технический результат проявляется в уменьшении числа отказов и ложных срабатываний АЛАР, где это изобретение может быть использовано, оптимизации управляющих воздействий, что в совокупности снижает ущерб от возможных аварий в энергосистеме.
Поставленная задача решается тем, что в известном способе, включающем контроль приращения Δϕ1 фазового угла ϕ1 между напряжением U1 в первой точке электропередачи и ее током i и режимного параметра по абсолютной величине, имеющей экстремальные значения при углах между векторами  электродвижущих сил по концам электропередачи, равных в асинхронном режиме 0 и 180o, фиксацию размещения электрического центра качаний и знака взаимного скольжения S12 векторов
электродвижущих сил по концам электропередачи, равных в асинхронном режиме 0 и 180o, фиксацию размещения электрического центра качаний и знака взаимного скольжения S12 векторов  , согласно которому приращение Δϕ1 вычисляют в интервале времени Δt между моментами t1 и t2 равенства режимного параметра в каждом цикле его колебаний заданному значению, соответствующему в асинхронном режиме углам между векторами
, согласно которому приращение Δϕ1 вычисляют в интервале времени Δt между моментами t1 и t2 равенства режимного параметра в каждом цикле его колебаний заданному значению, соответствующему в асинхронном режиме углам между векторами  , существенно отличным от 0 и 180o формируют абсолютную величину
, существенно отличным от 0 и 180o формируют абсолютную величину  приращения Δϕ1 и используют
приращения Δϕ1 и используют  для установления факта возникновения асинхронного режима, определяют знак Δϕ1/ и фиксируют его как знак S12 при размещении электрического центра качаний между местом приложения
для установления факта возникновения асинхронного режима, определяют знак Δϕ1/ и фиксируют его как знак S12 при размещении электрического центра качаний между местом приложения  и первой точкой или фиксируют знак S12 как противоположный знаку Δϕ при другом размещении электрического центра качаний, дополнительно вычисляют приращение Δϕ2 фазового угла ϕ2 между напряжением U2 во второй точке электропередачи, более удаленной от точки приложения
и первой точкой или фиксируют знак S12 как противоположный знаку Δϕ при другом размещении электрического центра качаний, дополнительно вычисляют приращение Δϕ2 фазового угла ϕ2 между напряжением U2 во второй точке электропередачи, более удаленной от точки приложения  , чем первая, и током i, формируют абсолютную величину
, чем первая, и током i, формируют абсолютную величину  этого приращения и определяют его знак, выбирают наибольшее значение
этого приращения и определяют его знак, выбирают наибольшее значение  , фиксируют факт возникновения асинхронного режима по превышению
, фиксируют факт возникновения асинхронного режима по превышению  установленного уровня, сравнивают Δϕ1 и Δϕ2 по знаку и абсолютной величине, фиксируют размещение электрического центра качаний на участке электропередачи между первой и второй точками при несовпадении упомянутых знаков или вне этого участка (при совпадении), в последнем случае фиксируют размещение электрического центра качаний между местом приложения
установленного уровня, сравнивают Δϕ1 и Δϕ2 по знаку и абсолютной величине, фиксируют размещение электрического центра качаний на участке электропередачи между первой и второй точками при несовпадении упомянутых знаков или вне этого участка (при совпадении), в последнем случае фиксируют размещение электрического центра качаний между местом приложения  и первой точкой, если
и первой точкой, если  больше
больше  или между местом приложения
или между местом приложения  и второй точкой, если
и второй точкой, если  больше
больше  .
.
Сопоставительный анализ признаков заявленного решения и признаков аналога и прототипа свидетельствуют о его соответствии критерию "новизна".
Признаки отличительной части формулы изобретения решают следующие функциональные задачи:
1. Вычисление Δϕ2 , формирование его абсолютного значения  и выбор
и выбор  , по уровню которого различают АР и СК, позволяет ослабить влияние соотношения α и k на устойчивость функционирования по условию (1) и повысить селективность отстройки от СК и внешнего АР.
, по уровню которого различают АР и СК, позволяет ослабить влияние соотношения α и k на устойчивость функционирования по условию (1) и повысить селективность отстройки от СК и внешнего АР.
2. Фиксация знаков Δϕ и Δϕ2 необходима для четкого распознавания АР по заданному сечению (знаки не совпадают) и внешних АР (знаки одинаковы), что повышает селективность способа.
3. Сравнение  по величине дает возможность фиксировать в АР размещение ЭЦК слева или справа от контролируемой зоны и вырабатывать оптимальные управляющие воздействия в заданном сечении при АР по внешним сечениям с учетом знака δ12 .
по величине дает возможность фиксировать в АР размещение ЭЦК слева или справа от контролируемой зоны и вырабатывать оптимальные управляющие воздействия в заданном сечении при АР по внешним сечениям с учетом знака δ12 .
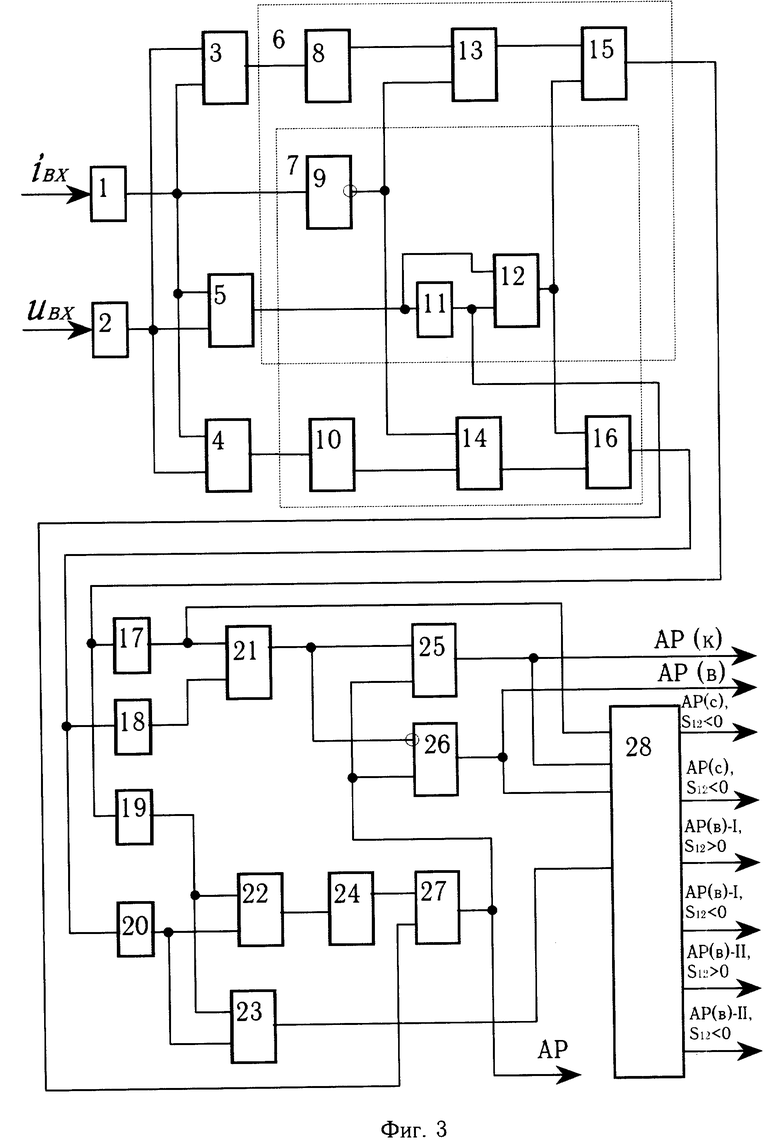
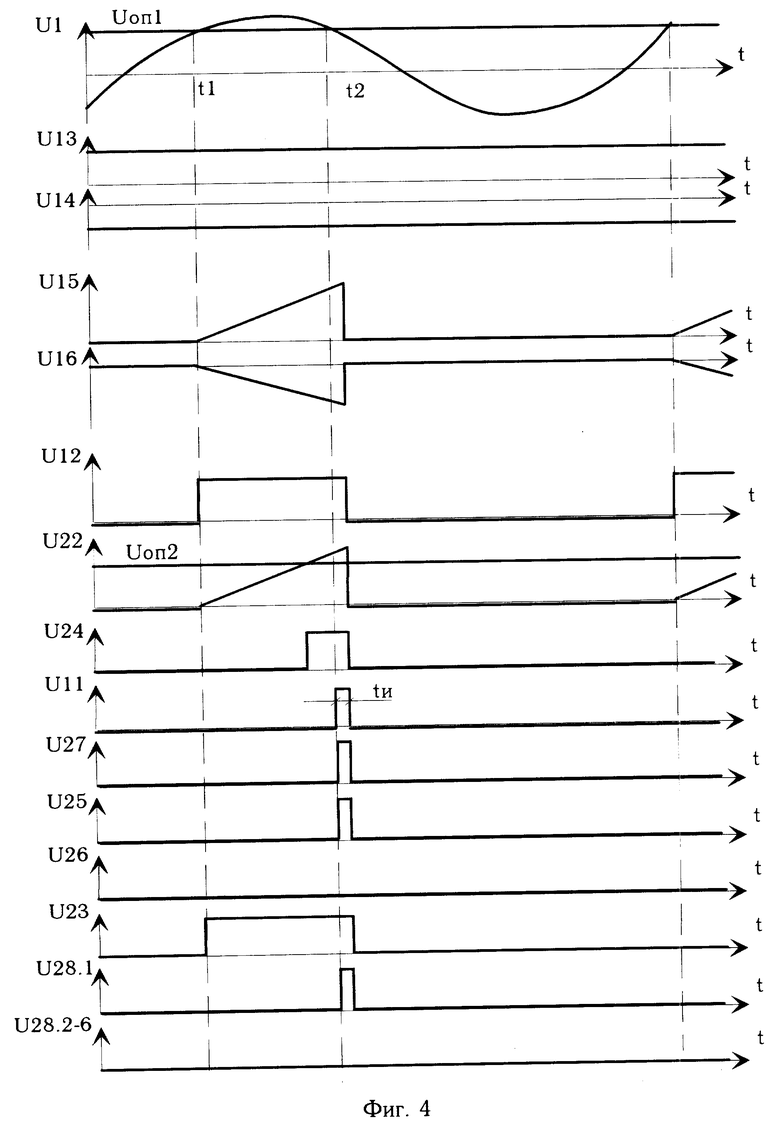
На фиг. 1 (а, б) представлены соответственно схема и векторная диаграмма электропередачи; на фиг. 2 показаны годографы вектора сопротивления  в контролируемой точке при различных размещении ЭЦК и соотношении ЭДС ( αц и k) и величины Δϕ для этих режимов; на фиг. 3 и 4 приведены соответственно функциональная схема реализации способа и временные диаграммы, поясняющие ее работу.
в контролируемой точке при различных размещении ЭЦК и соотношении ЭДС ( αц и k) и величины Δϕ для этих режимов; на фиг. 3 и 4 приведены соответственно функциональная схема реализации способа и временные диаграммы, поясняющие ее работу.
Напряжение и ток электропередачи в контролируемой точке представлены на фиг. 1 векторами  , а напряжения двух точек, получаемых обычно путем фантомного моделирования - векторами
, а напряжения двух точек, получаемых обычно путем фантомного моделирования - векторами  . Кроме того, показаны фазовые углы ϕi (i = 0, 1, 2) между векторами
. Кроме того, показаны фазовые углы ϕi (i = 0, 1, 2) между векторами  .
.
Считая электропередачу (фиг. 1, а) однородной и вводя коэффициенты k = E1/E2, α = Z1/Zэ,β = k•(Z2/Z1) и αц= k/(k+1) , можно получить формулы, показывающие зависимость этих параметров от угла δ между  [1, 2]:
[1, 2]: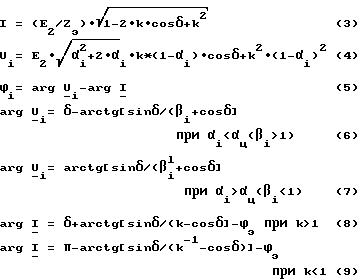
Годографы Zp на фиг. 2 имеют форму окружностей, показанных частично с охватом зоны δ1= 90°<δ<270°= δ2 , в которой изменяются приращения Δϕ соответствует система координат Ri, jXi с началом в точке i.
соответствует система координат Ri, jXi с началом в точке i.
При АР по контролируемому сечению, когда ЭЦК расположен между точками 1 и 2 на электропередаче (α1<αц<α2), имеют место годографы 1 (k > 1) и 2 (k < 1). Годографы 3 ( (αц>α2 , k > 1) и 4 ( (αц<α2 , k < 1) отображают АР по внешним сечениям, размещенным соответственно справа и слева от контролируемого. Остальные обозначения на фиг. 2 (Zm1, Zm2, Z1, Z2) аналогичны обозначениям на фиг. 1.
Функциональная схема (фиг. 3) содержит преобразователи тока 1 и напряжения 2, блоки 3 и 4 моделирования  , орган 5 контроля режимного параметра, формирователи 6 и 7 приращений Δϕ1 и Δϕ2 фазных углов ϕ1 и ϕ2 соответственно, частотные детекторы 8, 9 и 10, формирователь импульсов по спаду 11, логический элемент 12 типа 2ИЛИ - НЕ, сумматоры 13 и 14, управляемые интеграторы 15 и 16; нульиндикаторы 17 и 18, формирователи абсолютных значений 19 и 20, логический элемент 21 типа ИСКЛЮЧАЮЩЕЕ ИЛИ, максиселектор 22, компараторы 23 и 24, логические элементы 25, 26 и 27 типа 2И, причем у элемента 26 первый вход выполнен инверсным, логический блок 28.
, орган 5 контроля режимного параметра, формирователи 6 и 7 приращений Δϕ1 и Δϕ2 фазных углов ϕ1 и ϕ2 соответственно, частотные детекторы 8, 9 и 10, формирователь импульсов по спаду 11, логический элемент 12 типа 2ИЛИ - НЕ, сумматоры 13 и 14, управляемые интеграторы 15 и 16; нульиндикаторы 17 и 18, формирователи абсолютных значений 19 и 20, логический элемент 21 типа ИСКЛЮЧАЮЩЕЕ ИЛИ, максиселектор 22, компараторы 23 и 24, логические элементы 25, 26 и 27 типа 2И, причем у элемента 26 первый вход выполнен инверсным, логический блок 28.
Орган 5 может быть выполнен в виде реле тока, напряжения или полного сопротивления, так как эти режимные параметры имеют экстремальные значения при δ , равном 0 и 180o, причем коэффициент возврата органа должен быть равен 1, чтобы его срабатывание и возврат происходили в цикле АР или СК при заданном значении контролируемого параметра, например тока I электропередачи.
Формирователи 6 и 7 идентичны по структуре. Блоки 8, 13 и 15 формирователя 6 аналогичны блокам 10, 14 и 16 формирователя 7. Кроме того, формирователи имеют общие блоки 9,11 и 12.
Схема работает следующим образом. Ток i и напряжение u электропередачи, представляемые в дальнейшем векторами  через измерительные трансформаторы поступают на входы преобразователей 1 и 2, где линейно преобразуются в сигналы
через измерительные трансформаторы поступают на входы преобразователей 1 и 2, где линейно преобразуются в сигналы  на их выходах, значения которых должны быть всегда в границах рабочих диапазонов последующих элементов схемы:
на их выходах, значения которых должны быть всегда в границах рабочих диапазонов последующих элементов схемы:
где
ki и ku - коэффициенты передачи по напряжению и току через соответствующие измерительные трансформаторы и преобразователи.
Сигналы  подаются на входы включенных параллельно блоков 3 и 4 моделирования. На их выходах формируются сигналы
подаются на входы включенных параллельно блоков 3 и 4 моделирования. На их выходах формируются сигналы  , пропорциональные напряжениям
, пропорциональные напряжениям  в других точках электропередачи (см. фиг. 1):
в других точках электропередачи (см. фиг. 1):
где - сопротивления моделирования, γ1 и γ2 - коэффициенты передачи блоков 3 и 4 по входам, связанным с выходами преобразователя 1.
- сопротивления моделирования, γ1 и γ2 - коэффициенты передачи блоков 3 и 4 по входам, связанным с выходами преобразователя 1.
Сигнал  поступает также на вход органа 5, представляющего собой, например, реле тока (сопротивление по нижнему входу равно бесконечности). Этот орган срабатывает и возвращается в исходное состояние в моменты t1 и t2 каждого цикла колебаний соответственно, когда сигнал X1 = ki•I равен заданному значению Xоп = ki•Iср.
поступает также на вход органа 5, представляющего собой, например, реле тока (сопротивление по нижнему входу равно бесконечности). Этот орган срабатывает и возвращается в исходное состояние в моменты t1 и t2 каждого цикла колебаний соответственно, когда сигнал X1 = ki•I равен заданному значению Xоп = ki•Iср.
Сигналы  поступают на входы частотных детекторов 9, 8 и 10, выходные сигналы которых X8, X9 и X10 пропорциональны частотам входных, а значит и частотам ωi,ω1 и ω2 величин
поступают на входы частотных детекторов 9, 8 и 10, выходные сигналы которых X8, X9 и X10 пропорциональны частотам входных, а значит и частотам ωi,ω1 и ω2 величин  соответственно:
соответственно:
где
kf - коэффициент преобразования.
С учетом (14) - (16) сигналы X13 и X14 на выходах сумматоров 13 и 14 равны:
Для удобства построения временных диаграмм (фиг. 4), не искажающего сущность способа, сигналы X13 и X14 представлены усредненными за цикл АР величинами. Они различны по знаку, что соответствует АР по контролируемому сечению, когда годографы Zp (1 и 2 на фиг. 3) проходят между точками 1 и 2 комплексной плоскости.
В момент t1 срабатывания органа 5 его выходной сигнал X5 становится положительным, что эквивалентно логической "1". При этом сигнал X12 на выходе элемента 12 обращается в "0" согласно его логической функции:
Так как выход элемента 12 связан с управляющими входами интеграторов 15 и 16, последние деблокируются и их выходные сигналы X15 и X16 начинают расти согласно выражениям, подобным (2):
где
t > t1 - текущее время, Δϕ1t и Δϕ1t - приращения ϕ1 и ϕ2 в интервале (t - t1).
В момент t2 возврата органа 5 (X5=0) сигналы X15 и X16 принимают значения kfΔϕ1 и kfΔϕ2 соответственно, причем приращение угла Δϕi (i=1, 2) можно вычислить с учетом (5) - (9) по следующей формуле:
где
δ1 - значение δ в момент t1. Здесь положительный знак учитывается при α<αц(β>1) , а отрицательный знак при α>αц(β<1) .
Сигнал X15 поступает на входы блоков 17 и 19, а сигнал X16 на входы блоков 18 и 20. С помощью нульиндикаторов 17 и 18 оцениваются знаки входных сигналов, а следовательно, и знаки Δϕ1 и Δϕ2 . Их выходные сигналы X17 и X18 положительны (уровень логической "1") при положительных знаках Δϕ1 и Δϕ2 соответственно и равны нулю (уровень логического "0") - при отрицательных. Совпадение или несовпадение знаков X17 и X18 Δϕ1 и Δϕ2 фиксируется элементом 21. Согласно функции ИСКЛЮЧАЮЩЕЕ ИЛИ его выходной сигнал X21 соответствует "1" (X21 > 0) в первом случае и "0" (X21 = = 0) - во втором.
Абсолютные значения Δϕ1 и Δϕ2 вычисляются с учетом (20) и (21) посредством формирователей 19 и 20:
Далее с помощью максиселектора 22 из сигналов X19 и X20 выбирается наибольший:
В АР  в отличие от
в отличие от  мало зависит от изменения k в формуле (22) и всегда имеет высокий уровень. Так, для режимов 1 и 2 с соответствующими годографами на фиг. 4
мало зависит от изменения k в формуле (22) и всегда имеет высокий уровень. Так, для режимов 1 и 2 с соответствующими годографами на фиг. 4  почти вдвое больше
почти вдвое больше  , в то время как
, в то время как  практически не отличается от
практически не отличается от  . Поэтому селективность выявления АР при использовании
. Поэтому селективность выявления АР при использовании  вместо
вместо  в условии (1) можно повысить за счет увеличения ϕбл . Реализация (1) осуществляется с помощью компаратора 24, срабатывающего (X24 > 0) при X22 > Xоп2 или с учетом (25)
в условии (1) можно повысить за счет увеличения ϕбл . Реализация (1) осуществляется с помощью компаратора 24, срабатывающего (X24 > 0) при X22 > Xоп2 или с учетом (25)  = Xоп2/kf. Причем факт наличия АР фиксируется по этому условию только в течение короткого импульса X11(tи << t2-t1), возникающего на выходе формирователя 11 в момент t2 возврата органа 5, когда
= Xоп2/kf. Причем факт наличия АР фиксируется по этому условию только в течение короткого импульса X11(tи << t2-t1), возникающего на выходе формирователя 11 в момент t2 возврата органа 5, когда  имеет наибольшее значение. Эта фиксация осуществляется с помощью элемента 27 типа 2И. По истечении tи сигнал X12 становится положительным (логическая "1") и интеграторы 15 и 16 обнуляются для работы в следующем цикле.
имеет наибольшее значение. Эта фиксация осуществляется с помощью элемента 27 типа 2И. По истечении tи сигнал X12 становится положительным (логическая "1") и интеграторы 15 и 16 обнуляются для работы в следующем цикле.
В то же время зависимость Δϕ от α в (22) сохраняется. Чем больше удаленность ЭЦК от точки приложения контролируемого напряжения, тем меньше  . Это позволяет различать внешние АР справа и слева от контролируемого сечения, например, режимы с годографами 3 и 4 соответственно. В первом случае
. Это позволяет различать внешние АР справа и слева от контролируемого сечения, например, режимы с годографами 3 и 4 соответственно. В первом случае  , а во втором
, а во втором  . Сравнение
. Сравнение  в схеме осуществляет компаратор 24, срабатывающий (X24 > 0) при X19 > X20, что с учетом (23) и (24) адекватно условию
в схеме осуществляет компаратор 24, срабатывающий (X24 > 0) при X19 > X20, что с учетом (23) и (24) адекватно условию  .
.
Из (20) и (21) следует, что знаки  совпадают со знаками Δω1 и Δω2 соответственно, причем в АР по контролируемому сечению эти знаки противоположны, как, например, знаки Δϕ
совпадают со знаками Δω1 и Δω2 соответственно, причем в АР по контролируемому сечению эти знаки противоположны, как, например, знаки Δϕ , эквивалентных ЭДС (точки 1'и 2' на фиг. 2 соответствуют месту их приложения), при размещении ЭЦК между местом приложения
, эквивалентных ЭДС (точки 1'и 2' на фиг. 2 соответствуют месту их приложения), при размещении ЭЦК между местом приложения  и точкой 1 (αц>α1) , когда годографы
и точкой 1 (αц>α1) , когда годографы  проходят между точками 1 и 2' (кривые 1 - 3). Однако в тех случаях, когда годограф
проходят между точками 1 и 2' (кривые 1 - 3). Однако в тех случаях, когда годограф  проходит между точками 1' и 1 (кривая 4) знак S12 противоположен Δϕ1(αц<α1) .
проходит между точками 1' и 1 (кривая 4) знак S12 противоположен Δϕ1(αц<α1) .
Работа остальных блоков схемы (25 - 28) сводится к элементарным логическим операциям:
X27 = X24•X11 (26)
X25 = X21•X27 (27)
X28.1 = X25•X17 (29)
X28.3 = X26•X23•X17 (31)
Сигналы X27, X25, X26, X28.1 - X28.6 имеют место на выходах схемы с первого по девятый соответственно. Срабатывание по первому выходу (X27 > 0) свидетельствует о наличии АР. Если это АР по контролируемому сечению, то происходит также срабатывание по второму выходу (X25 > 0), а в случае внешнего АР - по третьему (X26 > 0). Четвертый и пятый выходы предназначены для фиксации АР по заданному сечению с определенным знаком S12(X28.1 > 0, если S12 > 0, и X28.2 > 0, если S12 < 0). Для фиксации внешнего АР с определенным знаком S12 предназначены шестой и седьмой выходы (ЭЦК между точкой приложения E1 и точкой 1 на электропередаче) и восьмой и девятый выходы (ЭЦК между точкой 1 и местом приложения E2). При этом срабатывание по выходам 6 и 8 происходит при S12 > 0, а по выходам 7 и 9 при S12 < 0.
Использование выходов схемы расширяет возможности по управлению режимом электропередачи после возникновения АР.
Таким образом, предлагаемый способ превосходит известный по селективности и устойчивости функционирования за счет использования  вместо
вместо  , а также по возможностям управления, благодаря раздельной фиксации АР по контролируемому и внешним сечениям с учетом знака S12.
, а также по возможностям управления, благодаря раздельной фиксации АР по контролируемому и внешним сечениям с учетом знака S12.

Изобретение относится к электротехнике, в частности к противоаварийной автоматике энергосистем, и может быть использовано, например, в автоматике ликвидации асинхронного режима (АЛАР). Сущность изобретения заключается в том, что наряду с известным контролем приращения Δϕ1 фазового угла между напряжением и током в одной точке электропередачи дополнительно вычисляют приращение Δϕ2 фазового угла в другой точке, причем точки выбирают так, чтобы электрический центр качания размещался между ними только при асинхронном режиме (АР) по заданному сечению. Выявление АР происходит при превышении наибольшим из абсолютных значений Δϕ1 и Δϕ2 заданного значения. При этом АР по заданному сечению фиксируют в случае различия знаков Δϕ1 и Δϕ2 , а внешние АР - при их совпадении. Кроме того, сопоставление абсолютных значений Δϕ1 и Δϕ2 позволяет установить, с какой стороны от контролируемого сечения находится сечение АР. Знак взаимного скольжения электродвижущих сил асинхронно идущих частей системы определяют, как и в известном способе, по знаку Δϕ1 . Технический результат проявляется в повышении селективности функционирования, а также расширении возможностей по управлению режимом электропередачи устройств АЛАР. 4 ил.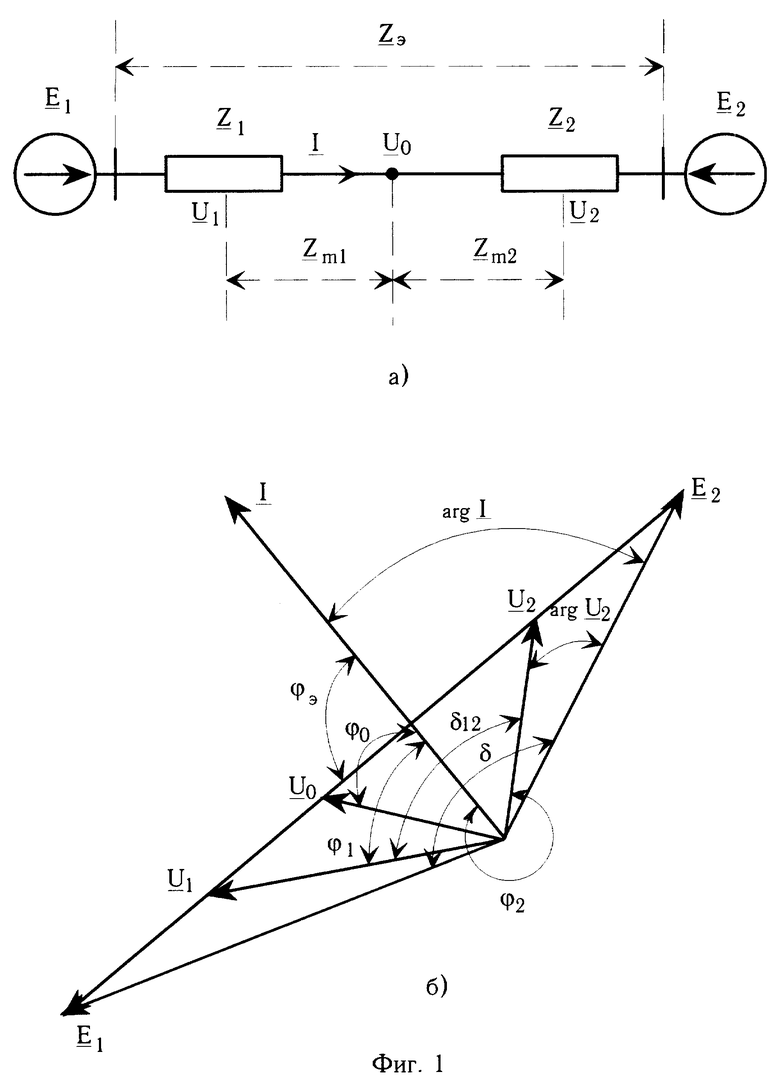
Способ выявления асинхронного режима электропередачи, включающий контроль приращения Δϕ1 фазового угла ϕ1 между напряжением U1 в первой точке электропередачи и ее током i и режимного параметра по абсолютной величине, имеющей экстремальные значения при углах между векторами  электродвижущих сил по концам электропередачи, равных в асинхронном режиме 0 и 180o, фиксацию размещения электрического центра качаний и знака взаимного скольжения S12 векторов
электродвижущих сил по концам электропередачи, равных в асинхронном режиме 0 и 180o, фиксацию размещения электрического центра качаний и знака взаимного скольжения S12 векторов  согласно которому приращение Δϕ1 вычисляют в интервале времени Δt между моментами t1 и t2 равенства режимного параметра в каждом цикле колебаний заданному значению, соответствующему в асинхронном режиме углам между векторами
согласно которому приращение Δϕ1 вычисляют в интервале времени Δt между моментами t1 и t2 равенства режимного параметра в каждом цикле колебаний заданному значению, соответствующему в асинхронном режиме углам между векторами  существенно отличным от 0 и 180o, формируют абсолютную величину
существенно отличным от 0 и 180o, формируют абсолютную величину  приращения Δϕ1 и используют
приращения Δϕ1 и используют  для установления факта возникновения асинхронного режима, определяют знак Δϕ1 и фиксируют его как знак S12 при размещении электрического центра качаний между местом приложения
для установления факта возникновения асинхронного режима, определяют знак Δϕ1 и фиксируют его как знак S12 при размещении электрического центра качаний между местом приложения  и первой точкой или фиксируют знак S12 как противоположный знаку Δϕ при другом размещении электрического центра качаний, отличающийся тем, что дополнительно вычисляют приращение Δϕ2 фазового угла ϕ2 между напряжением U2 во второй точке электропередачи, более удаленной от точки приложения
и первой точкой или фиксируют знак S12 как противоположный знаку Δϕ при другом размещении электрического центра качаний, отличающийся тем, что дополнительно вычисляют приращение Δϕ2 фазового угла ϕ2 между напряжением U2 во второй точке электропередачи, более удаленной от точки приложения  чем первая, и током i, формируют абсолютную величину
чем первая, и током i, формируют абсолютную величину  этого приращения и определяют его знак, выбирают наибольшее значение
этого приращения и определяют его знак, выбирают наибольшее значение  фиксируют факт возникновения асинхронного режима по превышению
фиксируют факт возникновения асинхронного режима по превышению  установленного уровня, сравнивают Δϕ1 и Δϕ2 по знаку и абсолютной величине, фиксируют размещение электрического центра качаний на участке электропередачи между первой и второй точками при несовпадении упомянутых знаков или вне этого участка - при совпадении в последнем случае фиксируют размещение электрического центра качаний между местом приложения
установленного уровня, сравнивают Δϕ1 и Δϕ2 по знаку и абсолютной величине, фиксируют размещение электрического центра качаний на участке электропередачи между первой и второй точками при несовпадении упомянутых знаков или вне этого участка - при совпадении в последнем случае фиксируют размещение электрического центра качаний между местом приложения  и первой точкой, если
и первой точкой, если  или между местом приложения
или между местом приложения  и второй точкой, если
и второй точкой, если  c
c
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Я.Э.Гоник, Е.С.Ишицкий, Автоматика ликвидации асинхронного режима, М., Энергоатомиздат, 1988 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1663691, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
