Изобретение относится к области электротехники, в частности к противоаварийной автоматике энергосистем (ЭС), в структуру которой входит автоматика ликвидации асинхронного режима (АЛАР), осуществляющая выявление и прекращение этого режима путем деления системы (ДС) или ресинхронизации (PCX).
Широко известен способ выявления асинхронного режима (АР) в ЭС на первом цикле по локальным режимным параметрам в узле системы, представляемой в виде электропередачи относительно контролируемого сечения при двухчастотном АР [1, стр.16-36]. К таким параметрам, функционально связанным с углом электропередачи δ (углом между эквивалентными ЭДС по ее концам), относятся представляемые обычно векторно ток  электропередачи, напряжение
электропередачи, напряжение  в контролируемом узле ЭС, сопротивление
в контролируемом узле ЭС, сопротивление  и мощность
и мощность  В этом способе по
В этом способе по  с помощью реле сопротивления устанавливается факт попадания электрического центра качаний (ЭЦК) на контролируемый участок сети (сечение АР), а по
с помощью реле сопротивления устанавливается факт попадания электрического центра качаний (ЭЦК) на контролируемый участок сети (сечение АР), а по  посредством реле мощности - переход δ через критическое по условиям устойчивости значение δкр=(120°÷180°) [1, стр.40-45]. Переориентация реле мощности в области срабатывания реле сопротивления служит признаком возникшего АР.
посредством реле мощности - переход δ через критическое по условиям устойчивости значение δкр=(120°÷180°) [1, стр.40-45]. Переориентация реле мощности в области срабатывания реле сопротивления служит признаком возникшего АР.
Недостатки известного способа вытекают из неоднозначности зависимости используемых параметров от угла δ, что не позволяет с приемлемой точностью определять его значения в требуемом диапазоне (90°<δ<270°) и величину скольжения s=dδ/dt во всем пакете расчетных схем и режимов. По этой причине снижается селективность и устойчивость функционирования способа и реализующих его устройств АЛАР при жестко заданных характеристиках реле сопротивления и мощности. Чтобы достичь приемлемого уровня устойчивости функционирования, приходится фиксировать факт возникновения АР во второй половине цикла при значениях угла δ, значительно превышающих δкр(δ>180°), причем обнаружение угрозы развития АР (δ<δкр) возможно, если пренебречь селективностью по отношению к глубоким синхронным качаниям (СК).
Известен также способ выявления АР, основанный на моделировании напряжений в двух точках электропередачи, ограничивающих контролируемый участок, при этом реальный угол δ вычисляется по годографам этих векторов и вектора напряжения в точке измерения [2].
При вычислении δ в темпе АР по годографам напряжений приемлемые результаты можно получить только в идеальных или близких к ним условиях. Однако несинфазность и самораскачивание генераторов внутри асинхронно идущих групп, распределение по передаче отборов мощности, затрудняющих моделирование, изменение параметров схемы и нагрузки в ходе развития аварии, приводят к сильным отклонениям годографов  от окружности и колебаниям вычисляемого угла δm относительно δ. Это особенно влияет на селективность выявления угрозы и момента возникновения АР, когда используются производные δm по времени. Увеличение числа замеров
от окружности и колебаниям вычисляемого угла δm относительно δ. Это особенно влияет на селективность выявления угрозы и момента возникновения АР, когда используются производные δm по времени. Увеличение числа замеров  для сглаживания колебаний методами аппроксимации вызовет снижение селективности за счет замедления фиксации АР до и в момент нарушения устойчивости.
для сглаживания колебаний методами аппроксимации вызовет снижение селективности за счет замедления фиксации АР до и в момент нарушения устойчивости.
Наиболее близким по технической сущности и достигаемым результатам к предлагаемому способу является способ, согласно которому измеряют по скалярным и векторным параметрам токи и напряжения в узле электропередачи, определяют на базе этих измерений угол электропередачи δл, заменяя им угол δ электропередачи (в [3] обозначен δ12), вычисляют первую и вторую производные δл по времени, определяют реактивное сопротивление Xmin от точки измерения до точки с минимальным напряжением (ТМН) и знак производной по времени активной мощности Рн, передаваемой по электропередаче, и фиксируют момент возникновения АР по совпадению знаков δл и его производных, если знак производной Рн противоположен им, а ТМН расположена в пределах защищаемого участка сети (Xmin находится в установленном диапазоне) [3]. При этом предполагается, что 90°<δ<180°, когда ТМН и ЭЦК практически совпадают.
Предположение о том, что δ и δл приблизительно равны, вполне допустимо при достаточном приближении моделируемых точек к точкам приложения эквивалентных ЭДС, что возможно только в благоприятных для моделирования схемно-режимных условиях (длинные транзиты без существенных отборов мощности, простая, близкая к радиальной структура сети). Однако практически эти условия выполняются редко, что вынуждает сужать контролируемый участок, чтобы к тому же отстроиться от внешних АР. В таких случаях угол δл может существенно (на 60°÷70°) отклоняться от δ, особенно при δ=(80°÷120°) (см фиг.1, кривые 1 и 2).
Недостатками известного способа являются низкие селективность и устойчивость функционирования.
Неполнота первого свойства вызвана отождествлением вычисляемого угла δл с реальным углом δ. При этом в ряде режимов возможно несовпадение знаков вторых производных по времени от δл и δ. Представим их взаимосвязь в удобном для анализа виде:

Даже для простейшей однородной электропередачи без отбора мощности справедливы следующие утверждения:
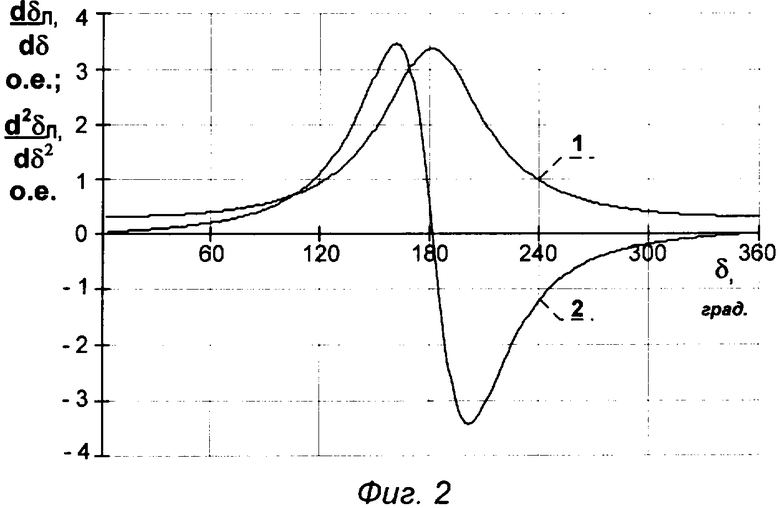
1. Знак слагаемого С при АР на заданном участке сети определяется только знаком ds/dt, т.к. сомножитель А всегда положителен (см фиг.2, кривая 1), и достигает наибольшего значения при δ=±180°.
2. Знак слагаемого В определяется знаком dA/dδ (s2>0), который в диапазоне - 180°<δ<180° совпадает со знаком δ и противоположен ему при других значениях δ в диапазоне - 360°<δ<360° (см фиг.2, кривая 2), причем экстремальные значения dA/dδ имеют место при δ=±(120°÷150°), а нулевые - при δ=±180°, что подтверждается характером изменения производной по δ от функции, показанной кривой 1 на фиг.2.
Следовательно, за счет слагаемого В, если |В|>|C|, возможна фиксация момента возникновения АР при глубоких СК, особенно с учетом действия автоматики предотвращения нарушения устойчивости (АПНУ) и реальных схемно-режимных условий с более сложной зависимостью δл от δ.
С другой стороны, в ходе развития АР фиксируется не момент, а угроза его возникновения из-за того же слагаемого В, которое может вызвать изменение знака d2δл/dt2 гораздо раньше, чем изменится знак d2δ/dt2. При этом селективность выявления угрозы АР не всегда обеспечена.
Кроме того, из-за нарушения устойчивости функционирования возможна фиксация близкого внешнего АР, если угол ϕэ эквивалентного сопротивления электропередачи существенно больше угла ϕл сопротивления контролируемого участка сети, т.к. при δ>δкр выполняются все необходимые условия, в т.ч. и Хmin<Хл за счет большего наклона годографа  к вектору
к вектору  эквивалентного сопротивления электропередачи в плоскости R, jX.
эквивалентного сопротивления электропередачи в плоскости R, jX.
Задачей, на решение которой направлено заявленное предложение, является повышение селективности и устойчивости функционирования.
Получаемый технический результат проявляется в уменьшении числа отказов, излишних и ложных срабатываний АЛАР, где это изобретение может быть использовано, что в совокупности снижает ущерб от возможных аварий в современных сложных энергосистемах.
Поставленная задача решается тем, что в известном способе, согласно которому измеряют по скалярным и векторным параметрам токи и напряжения в узле электропередачи, определяют на базе этих измерений угол электропередачи δ, вычисляют его первую и вторую производные по времени и фиксируют момент возникновения асинхронного режима по совпадению знаков угла δ и его производных, дополнительно вычисляют проекцию вектора измеряемого напряжения (Um) на ось, повернутую в комплексной плоскости относительно вектора тока электропередачи на угол α, дополняющий расчетный угол ϕэ эквивалентного сопротивления электропередачи до 90°, вычисляют вектор полного сопротивления  как отношение вектора напряжения к вектору тока в контролируемом узле, вычисляют проекцию Z0m вектора на ось jXm, повернутую в комплексной плоскости сопротивлений относительно мнимой оси jX на угол α, дополняющий расчетный угол ϕэ эквивалентного сопротивления электропередачи до 90°, фиксируют попадания значений Um и Z0m в установленные для них диапазоны как дополнительное условие выявления асинхронного режима по контролируемому сечению, определяют знак Um в момент t1 входа его значений в установленный диапазон как знак угла δ, вычисляют в этом диапазоне угол электропередачи при его положительном знаке по формуле
как отношение вектора напряжения к вектору тока в контролируемом узле, вычисляют проекцию Z0m вектора на ось jXm, повернутую в комплексной плоскости сопротивлений относительно мнимой оси jX на угол α, дополняющий расчетный угол ϕэ эквивалентного сопротивления электропередачи до 90°, фиксируют попадания значений Um и Z0m в установленные для них диапазоны как дополнительное условие выявления асинхронного режима по контролируемому сечению, определяют знак Um в момент t1 входа его значений в установленный диапазон как знак угла δ, вычисляют в этом диапазоне угол электропередачи при его положительном знаке по формуле
δ(+)=2·arccos(Um/Uн);
δ(-)=(2·π-δ(+)),
где Uн - номинальное напряжение в узле электропередачи, и фиксируют асинхронный режим с ускорением при положительном знаке Um и асинхронный режим с торможением при отрицательном знаке Um.
Кроме того, дополнительно на каждом шаге измерений вычисляют по заданным граничным фазовым траекториям «угол - скольжение» с учетом параметров исходного режима допустимое по условиям устойчивости значение sдоп первой производной угла δ по времени (s) и фиксируют угрозу возникновения асинхронного режима, если s больше sдоп.
Сопоставительный анализ признаков заявленного решения и признаков аналогов и прототипа свидетельствуют о его соответствии критерию «новизна».
Признаки отличительной части формулы изобретения решают следующие функциональные задачи:
1. Признак «...вычисляют проекцию вектора измеряемого напряжения на ось, повернутую в комплексной плоскости относительно вектора тока электропередачи на угол, дополняющий расчетный угол эквивалентного сопротивления электропередачи до 90°...» позволяет, во-первых, определить угол δ как элементарную функцию от Um и, во-вторых, задавая пределы изменения Um, ограничить получаемые значения δ диапазоном, включающим δкр, и обеспечить тем самым высокую степень соответствия вычисляемых и реальных значений угла δ.
2. Признак «...вычисляют проекцию вектора полного сопротивления на ось, повернутую в комплексной плоскости сопротивлений относительно мнимой оси на угол, дополняющий расчетный угол эквивалентного сопротивления электропередачи до 90°...» позволяет более точно и направленно измерять расстояние до ЭЦК, что повышает устойчивость функционирования при внешних и внутренних АР, близких к границам контролируемого участка сети.
3. Признак «...вычисляют по заданным граничным фазовым траекториям «угол - скольжение» с учетом параметров исходного режима допустимое по условиям устойчивости значение первой производной угла электропередачи по времени...» дает возможность селективно выявлять угрозу АР, повышая селективность способа в целом.
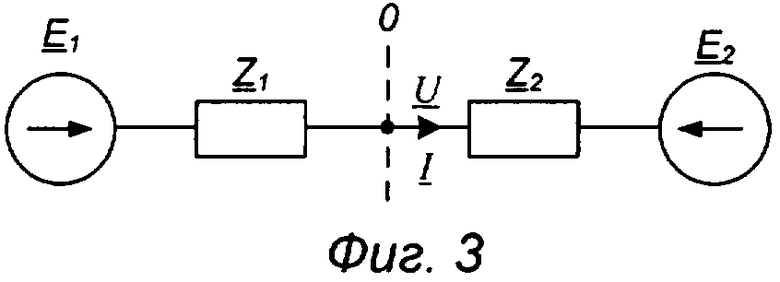
На фиг.1 изображено изменение угла моделируемого угла электропередачи δл при нахождении ЭЦК в контролируемой зоне (кривая 1) и за ее пределами (внешний АР) - кривая 2; на фиг.2 изображены изменение первой и второй производных δл по δ - кривая 1 и кривая 2 соответственно; на фиг.3 представлена схема замещения электропередачи - эквивалента ЭС при двухчастотном АР с ЭДС 
 и
и  по концам передачи, и сопротивлениями
по концам передачи, и сопротивлениями  и
и  , на которые делится ее эквивалентное сопротивление
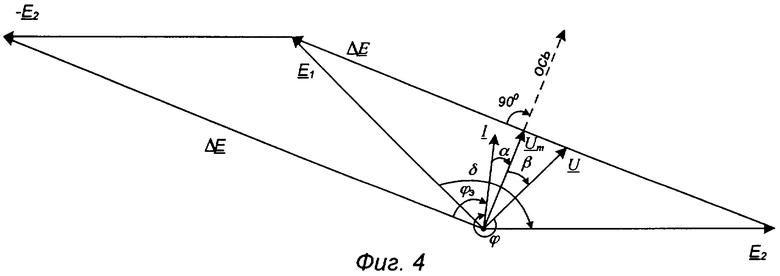
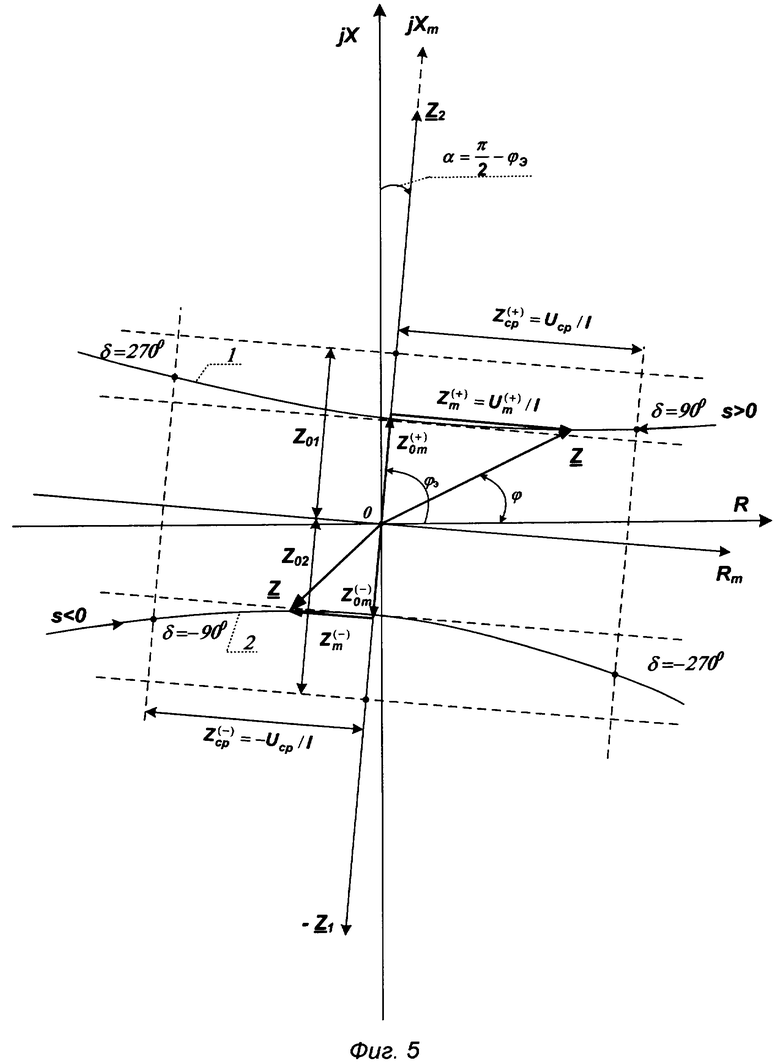
, на которые делится ее эквивалентное сопротивление  контролируемым узлом 0; на фиг.4 изображена векторная диаграмма электропередачи - эквивалента ЭС при двухчастотном АР, - представленной на фиг.3; на фиг.5 показаны годографы сопротивления Z в контролируемом узле в режимах внутренних АР с размещением ТМН слева при s>0 (годограф 1) и справа при s<0 (годограф 2) от точки измерения 0, а также показаны параметры Z0m и Um в их взаимосвязи и заданных пределах изменения; на фиг.6 изображен годограф
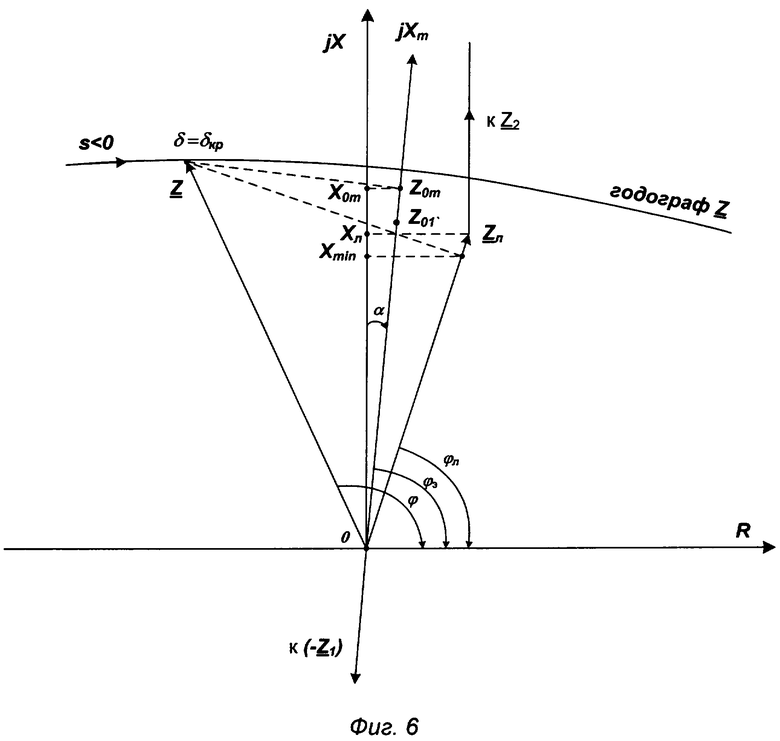
контролируемым узлом 0; на фиг.4 изображена векторная диаграмма электропередачи - эквивалента ЭС при двухчастотном АР, - представленной на фиг.3; на фиг.5 показаны годографы сопротивления Z в контролируемом узле в режимах внутренних АР с размещением ТМН слева при s>0 (годограф 1) и справа при s<0 (годограф 2) от точки измерения 0, а также показаны параметры Z0m и Um в их взаимосвязи и заданных пределах изменения; на фиг.6 изображен годограф  при близком внешнем АР и показаны параметры, контролирующие зону размещения ЭЦК по известному и предлагаемому способам; на фиг.7 представлена функциональная схема реализации заявляемого способа.
при близком внешнем АР и показаны параметры, контролирующие зону размещения ЭЦК по известному и предлагаемому способам; на фиг.7 представлена функциональная схема реализации заявляемого способа.
Напряжение в контролируемом узле 0 и ток электропередачи (фиг.2) показаны на векторной диаграмме (фиг.3) векторами  и
и  соответственно, причем последний отстает от вектора
соответственно, причем последний отстает от вектора  на угол ϕэ, а от на угол ϕ. Следовательно, проекция Um вектора на ось, повернутую относительно на угол α, может быть найдена как
на угол ϕэ, а от на угол ϕ. Следовательно, проекция Um вектора на ось, повернутую относительно на угол α, может быть найдена как

где ϕ - угол между векторами  и
и  α - угол, дополняющий расчетный ϕэ, эквивалентного сопротивления электропередачи до 90°; Z=U/I - модуль полного сопротивления в точке измерения 0.
α - угол, дополняющий расчетный ϕэ, эквивалентного сопротивления электропередачи до 90°; Z=U/I - модуль полного сопротивления в точке измерения 0.
Очевидно, что Um и напряжение  в ТМН совпадают по модулю, т.е. |Um|=Uтмн Отличие Um от Uтмн состоит в том, что Um меняет свой знак при переходе δ через значения ±180°, а Uтмн всегда положительно.
в ТМН совпадают по модулю, т.е. |Um|=Uтмн Отличие Um от Uтмн состоит в том, что Um меняет свой знак при переходе δ через значения ±180°, а Uтмн всегда положительно.
Поэтому по заданному диапазону Um можно не только определить область значений угла δ, близких к 180° (рабочий диапазон), но и найти знак этого угла и его производной s как знак проекции Um в момент ее входа в упомянутый диапазон (знаки δ, s и Um одинаковы до изменения последнего в цикле АР). Кроме того, важнейшим свойством Um является его связь через простую функцию с углом δ.
Допустим, что

где  и Uц.п - вектор напряжения в ЭЦК и его проекция на биссектрису угла δ.
и Uц.п - вектор напряжения в ЭЦК и его проекция на биссектрису угла δ.
Такое допущение вполне правомерно при 90°<δ<270°, т.к. погрешность в этом диапазоне не превышает 1% для реальных значений k=E1/E2 (0.8<k<1.25 [1, стр. 19-20]).
Зная относительную удаленность αц по электропередаче (фиг.3) ЭЦК от точки приложения  можно с учетом (3) получить следующие выражения:
можно с учетом (3) получить следующие выражения:


где Uн - номинальное напряжение в контролируемом узле.
Замена  на Uн вносит погрешность по нашим оценкам не более 5%, т.к. E1 и Е2 изменяются в диапазоне от 0.9·Uн до 1.1·Uн при реальных значениях s [1, стр.17].
на Uн вносит погрешность по нашим оценкам не более 5%, т.к. E1 и Е2 изменяются в диапазоне от 0.9·Uн до 1.1·Uн при реальных значениях s [1, стр.17].
Совместное решение (2) и (5) позволяет установить связь между δ и Um через элементарную тригонометрическую функцию:

где δm - угол, моделирующий δ.
Абсолютная погрешность Δδ=δ-δm моделирования, как показали расчеты, не ±6%, для принятых крайних значениях рабочего диапазона (δ=90° и δ=270°), уменьшается до нуля при δ=180° (Um=0). Отклонение ϕэ от реальных значений в пакете расчетных схем ЭС также вносит погрешность, пропорциональную этому отклонению (практически ±10°). Однако суммарная погрешность Δδ не выходит за пределы ±15°, что значительно меньше, чем при замене δ на δл [3], когда Δδ может достигать (60°÷70°) (см. выше на стр.2). При этом использование δm вместо δ не влияет на точность определения знака δ и его производных, что существенно повышает селективность предлагаемого способа.
Как было отмечено, установленный диапазон изменения Um соответствует рабочему диапазону угла δ, в котором расчет его значений производят в зависимости от знака δ, определенного на границе этого диапазона как знак Um:


где δ(+) и δ(-) - угол, моделирующий δ при его положительном и отрицательном значениях соответственно.
В предлагаемом способе, кроме Um и функционально связанного с ней угла δ, вычисляют проекцию Z0m вектора  на ось jXm, повернутую в комплексной плоскости на угол α=90°-ϕэ. Эта проекция, как показано на фиг.4, может быть определена по формуле
на ось jXm, повернутую в комплексной плоскости на угол α=90°-ϕэ. Эта проекция, как показано на фиг.4, может быть определена по формуле

где Z - модуль  , R и X - активная и реактивная составляющие
, R и X - активная и реактивная составляющие  .
.
Фактически Z0m соответствует сопротивлению от точки измерений (узел 0 на электропередаче) до ТМН, а значит, и ЭЦК в рабочем диапазоне углов δ, причем знак проекции Z0m положителен при размещении ЭЦК справа от узла 0 и отрицателен в противном случае, когда (ϕэ-ϕ)<90°. Эти режимы отображены годографами 1 (s>0) и 2 (s>0) на фиг.6. Также показаны проекция Zm вектора на ось Rm, образующую с осью jXm декартову систему координат, вычисляемая по формуле

или с учетом (2)

Из (9)-(11) очевидна связь проекций Um, Z0m и Zm. Значения Zm при s>0 и 0°<δ<180° положительны (ϕэ-ϕ>0), а при s<0 и - 180°<δ<0° - отрицательны (ϕэ-ϕ<0).
На фиг.5 знаки изображенных проекций отмечены индексами «+» и «-». Кроме того, показаны предельные значения установленных для этих значений диапазонов:


Здесь с учетом (11) Zср=Uср/I, где Uср определяет границы заданного для Um диапазона:

Согласно предлагаемому способу, АР будет выявлен при δ>δкр, когда выполняются условия (12)-(14) и совпадают знаки угла δ и его первой и второй производных по времени, причем δ вычисляют по (7) или (8) в зависимости от его знака, определенного в момент t1 входа годографа в область срабатывания как знак Um.
Поскольку последний соответствует знаку скольжения s=dδ/dt, АР с ускорением фиксируют при Um>0, а АР с торможением - при Um<0.
В известном способе также определяют сопротивление до ТМН, но его реактивную составляющую Xmin, обозначенной в [3] Хтмн.
Преобразуя выражение для ХТМН с учетом того, что Q1=U1·I1·sinϕ, P1=U1·I1·cosϕ, Z=U1/I1, 
 a также определяя реактивную составляющую Х0m вектора
a также определяя реактивную составляющую Х0m вектора  получим формулы, по которым можно сравнить методы оценки расстояния до ТМН по известному и предлагаемому способам:
получим формулы, по которым можно сравнить методы оценки расстояния до ТМН по известному и предлагаемому способам:


Очевидно, отличие результатов расчета по (15) и (16) связано в большей степени неравенством ϕл и ϕэ, т.к. в случае, когда ϕл=ϕэ, это отличие при δкр<δ<180° (R мало) обычно не превышает 10% в сторону увеличения или уменьшения Хmin, в зависимости от сочетания знаков R и X. Поэтому для наглядного сравнения способов на фиг.6 сопротивление Xmin при близком внешнем АР определялось по (16) с заменой ϕэ на ϕл. Здесь ϕэ>ϕл, s<0, Z01=Zл, Z02=0.
Очевидно, что в некотором диапазоне при δ>δкр в прототипе [3] выполняются все условия фиксации АР, т.к. Хmin<Хл, в то время как в предлагаемом способе условие (13) не выполняется (Z0m>Z01) и внешний АР не выявляется, что свидетельствует о более высокой устойчивости функционирования при отклонениях ϕэ от ϕл в расчетном пакете схем ЭС. Дополнительное ограничение рабочего диапазона δ (по ф. (5), на с.174 в [4]) приводит к замедлению обнаружения АР на контролируемом участке, особенно если ТМН смещается к его концу. При этом фиксируется не момент, а факт возникновения АР (δ>δкр), что может привести к разновременности срабатывания устройств АЛАР параллельных линий и нарушению устойчивости функционирования автоматики в целом.
Кроме фиксации момента возникновения АР предлагаемый способ позволяет выявлять угрозу его развития при δ>δкр. Для этого дополнительно в зоне срабатывания, когда выполняются условия (12)-(14), на каждом шаге измерений вычисляют по заданным граничным фазовым траекториям «угол - скольжение» с учетом параметров и исходного режима допустимое по условиям устойчивости значение sдоп скольжения s и фиксируют угрозу возникновения АР с ускорением (Um>0) или торможением (Um<0) при

Граничные траектории задаются, например, аппроксимирующей функцией, как в [5, ф.(173) на с.144], из которой

где δ0 - значение δ в исходном режиме; δср - некоторое значение δ, определяющее параметры аппроксимации (δcp≈180°); k1 и k2 - постоянные коэффициенты, обеспечивающие наибольшее соответствие фазовых траекторий и функции (18). Следует заметить, что в (17) и (18) используются абсолютные значения s и δ. Отметим также, что при положительной погрешности δ, s - уменьшается, а при отрицательной - увеличивается. То же происходит с sдоп по (18). Следовательно, момент выполнения (17) мало зависит от погрешности моделирования δ по предлагаемому способу, что указывает на его высокую селективность.
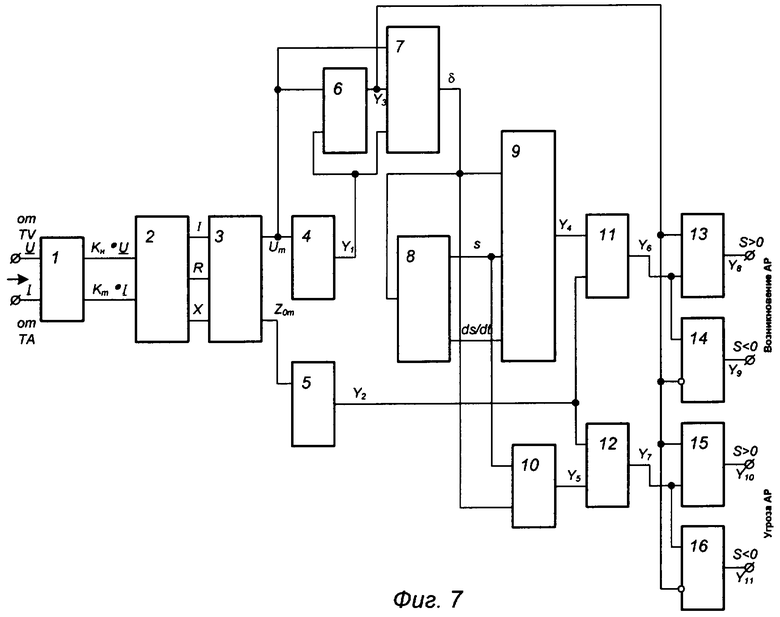
На фиг.7 представлена упрощенная (без блокировки от к.з.) схема реализации предложенного способа.
Схема содержит блок 1 датчиков тока и напряжения, блок 2 функциональной обработки сигналов, формирователь 3 параметров распознавания АР, ограничитель 4 диапазона изменения напряжения Um, ограничитель 5 диапазона изменения сопротивления Z0m, фиксатор 6 знака напряжения Um, формирователь 7 угла электропередачи δ, формирователь 8 производных угла δ, блок 9 фиксации момента возникновения АР, блок 10 фиксации угрозы возникновения АР и конъюнкторы 11-16 (логические элементы «И»). Здесь же обозначены все входные и выходные сигналы блоков (Yi - логические сигналы).
Схема работает следующим образом. Входные сигналы от измерительных трансформаторов контролируемого узла ЭС поступают на вход схемы через блок 1, представляющий собой два параллельных канала промежуточных преобразователей (датчиков) напряжения и тока. Выходные сигналы этих датчиков (блок 1) линейно связаны с входными, имея вид (обычно напряжение) и диапазоны изменения, пригодные для использования, например, в цифровой части схемы (АЦП).
Блок 2 осуществляет частотную фильтрацию и разложение входных сигналов на ортогональные составляющие с последующим вычислением необходимых далее параметров  с помощью цифровой техники.
с помощью цифровой техники.
В блоке 3 вычисляются параметры Um и Z0m по (2) и (9) соответственно. С помощью блоков 4 и 5 задают возможные для данного сечения диапазоны изменения Um и Z0m. Выходные сигналы Y1 и Y2 этих блоков принимают значение логической «1» только при выполнении условий (14) и (12) соответственно. В момент возникновения условия (14) фиксируется знак Um блоком 6 (Y3=1 при положительном знаке и Y3=0 - при отрицательном). В зависимости от знака Um по (7) или (8) в блоке 7 производится вычисление угла δ электропередачи в рабочем диапазоне (Y1=1). Его первую s и вторую ds/dt производные по времени получают на верхнем и нижнем выходах блока 8 соответственно. Знаки δ, s и ds/dt преобразуются в блоке 9 в логические сигналы подобно тому, как это делается в блоке 6. Совпадение значений этих сигналов (Y4=1) происходит в момент возникновения АР. Условие (17) проверяется в блоке 10, причем его выполнение (Y5=1) свидетельствует об угрозе возникновения АР. Здесь же производится оценка sдоп по заданным граничным фазовым траекториям, например, с помощью (18), и реализуется функция «запоминания» значения δ0 угла δ в предшествующем аварии режиме ЭС.
Выходные логические сигналы Y6=Y2·Y4 и Y7=Y2·Y5 конъюнкторов 11 и 12 соответственно могут принять значение «1» только при размещении ТМН (ЭЦК) на контролируемом участке сети (Y2=1) и фиксации момента (Y4=1) или угрозы (Y5=1) возникновения АР.
Конъюнкторы 13-16 разделяют каждый из сигналов Y6 и Y7 в зависимости от знака Um (значения Y3), совпадающего со знаками скольжения  .
.
Источники информации, использованные при составлении описания изобретения
1. Гоник Я.Е., Иглицкий Е.С. Автоматика ликвидации асинхронного режима. - М.: Энергоатомиздат, 1988;
2. Патент RU 2204877 С1, МКП H02J 3/24. 2003 г.
3. Патент RU 2199807 C2, МКП H02J 3/24. 2003 г.
4. Зелаков С.И., Лисицин А.А., Кац П.Я., Эдлин М.А. Адаптивная цифровая автоматика ликвидации асинхронных режимов // ОАО «Институт «Энергосетьпроект», Сб. докладов научно-практической конференции «Актуальные проблемы релейной защиты, противоаварийной автоматики, устойчивости и моделирования энергосистем в условиях реструктуризации электроэнергетики». - М.: «Издательство НЦ ЭНАС» 2001, с.172-179.
5. Розенблюм Ф.М. Измерительные органы противоаварийной автоматики энергосистем. - М.: Энергоатомиздат, 1981: - 160 с., ил.
Изобретение относится к электротехнике и может быть использовано в средствах противоаварийной автоматики электроэнергетической системы. В способе вычисляют вектор полного сопротивления как отношение вектора напряжения к вектору тока в контролируемом узле. Вычисляют проекцию вектора полного сопротивления на ось, повернутую в комплексной плоскости сопротивлений относительно мнимой оси на угол, дополняющий расчетный угол эквивалентного сопротивления электропередачи до 90°. По проекции определяют сопротивление до электрического центра качаний. Фиксируют его размещение центра качаний на контролируемом участке сети, если значение проекции попадает в установленный диапазон. Вычисляют проекцию вектора измеряемого напряжения на ось, повернутую в комплексной плоскости относительно вектора тока электропередачи на такой же дополняющий угол. Через проекцию напряжения вычисляют угол электропередачи через простую тригонометрическую функцию. Момент возникновения асинхронного режима фиксируют по совпадению знаков угла электропередачи со знаками его первой и второй производной по времени. Фиксируют угрозу возникновения асинхронного режима по превышению первой производной допустимого значения, вычисляемого с использованием граничных фазовых траекторий «угол - скольжение» и параметров исходного режима. В способе обеспечивается повышение селективности и устойчивости выявления асинхронного режима и снижение числа неправильных действий автоматики. 1 з.п. ф-лы, 7 ил.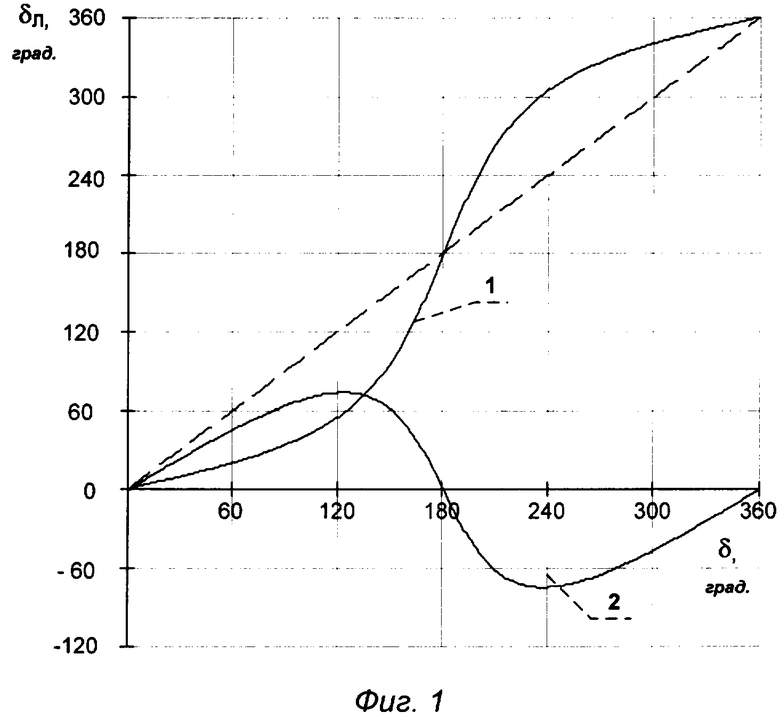
δ(+)=2·arccos(Um/Uн),
δ(-)=(2·π-δ(+)),
где Uн - номинальное напряжение в узле электропередачи, a Um - проекция вектора измеряемого напряжения, и фиксируют асинхронный режим с ускорением при положительном знаке проекции вектора измеряемого напряжения и асинхронный режим с торможением при ее отрицательном знаке.
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА | 2000 |
|
RU2199807C2 |
| СПОСОБ ВЫЯВЛЕНИЯ И ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ УСТРОЙСТВОМ АВТОМАТИКИ | 2001 |
|
RU2204877C1 |
| RU 20442246 C1, 20.08.1995 | |||
| ДЛЯ ПРОДАЖИ ШТУЧНЫХ ТОВАРОВ | 0 |
|
SU166193A1 |
| Устройство для выявления асинхронного хода в энергосистеме на первом цикле | 1980 |
|
SU868919A1 |
| US 4538197 A 27, 08.1985 | |||
| DE 3007181 A1, 04.09.1980 | |||
| Приспособление для изготовления круглых ремней | 1930 |
|
SU27757A1 |
| WO 9919956 B1, 22.04.1999. | |||

