Изобретение относится к электротехнике, в частности к противоаварийной автоматике (ПА) энергосистем, и может быть использовано, например, в автоматике ликвидации асинхронного режима (АЛАР).
Известно, что непрекращенный асинхронный режим (АР) в энергосистеме (ЭС), являющийся следствием нарушения устойчивости, способен привести к развитию тяжелых системных аварий. Его своевременная ликвидация с помощью управляющих воздействий АЛАР требует быстрого и селективного выявления, как правило, на первом цикле колебаний режимных параметров.
Признаком возникновения АР по заданному сечению является превышение критического значения (≥180°) углом δ между электродвижущими силами (ЭДС) по концам электропередачи, эквивалентирующей ЭС при двухмашинном АР относительно контролируемого узла, в случае размещения электрического центра качаний (ЭЦК) на определенном участке прилегающей сети.
Известен способ выявления АР, где увеличение угла δ электропередачи, свидетельствующее о наличии АР, фиксируют по переходу фазового угла ϕ между напряжением и током в узле ЭС из одной области в другую при условии, что угол δ находится в области значений, близких к 180° [1, с.92-96]. В типовых устройствах автоматики реализация этого способа осуществляется путем фиксации переориентации реле мощности в зоне срабатывания реле сопротивления. При этом характеристика реле мощности соответствует границе, разделяющей области значений угла ϕ, а характеристика срабатывания реле сопротивления определяет требуемый диапазон углов δ и контролируемый по размещению ЭЦК участок сети.
Недостатком известного способа являются низкие селективность и устойчивость функционирования из-за зависимости ϕ от изменения в ходе АР угла ϕэ эквивалентного сопротивления электропередачи в переделах (60÷110)° при жесткой связи характеристики реле мощности с расчетным значением ϕэ, а также из-за неопределенности фиксируемого диапазона δ, вызванной неоднозначностью его связи с измеряемым сопротивлением. По этим причинам возможен отказ способа или фиксация внешнего АР при приближении ЭЦК к границам контролируемого участка. Кроме того, способ не позволяет обеспечить резервирование автоматики смежных сечений из-за неспособности селективно обнаруживать внешние АР, определить период АР на первом цикле с целью выявления условий саморесинхронизации, отличить АР от циклов колебаний при коротких замыканиях (КЗ).
Известен другой способ, основанный на прямом моделировании δ через угол δ12 между напряжениями по концам контролируемого участка. Сами эти напряжения получают в процессе моделирования на основании напряжения и тока в узле ЭС [1, с.92]. Такой подход дает нелинейную зависимость δ12 от δ и определяет ее неоднозначность из-за влияния изменяющихся в ходе АР в пакете расчетных режимов параметров электропередачи (эквивалентного сопротивления Zэ, и соотношения ЭДС E1 и Е2). Однако приемлемый уровень селективности и устойчивости функционирования может быть обеспечен, если фиксировать факт возникновения АР при значениях δ12, с запасом превышающих критическое значение δ (δ12>210÷240°). Вместе с тем невозможность достоверно оценить скольжение s=dδ/dt по производной от δ12, не позволяет определить период АР и обеспечить отстройку от КЗ. Резервирование АЛАР смежных сечений также невозможно, т.к. при внешних АР|δ12|<90°.
Известен также способ, основанный на моделировании по локальным параметрам напряжений в узлах ЭС, ограничивающих контролируемую зону [2]. Здесь угол, моделирующий δ, вычисляется по траекториям (годографам) векторов этих напряжений в комплексной плоскости. Такой метод дает приемлемые результаты в идеальных или близких к ним схемно-режимных условиях (длинные транзиты без существенных отборов мощности, простая, близкая к радиальной структура сети, стабильность параметров эквивалентной электропередачи в ходе АР). Однако несинфазность и самораскачивание внутри асинхронно идущих групп генераторов, многосвязность сети с распределенными по передачам отборами мощности, затрудняющая моделирование, изменение параметров схемы и нагрузки в процессе развития аварии приводят к сильным отклонениям годографов от окружностей и, как следствие, большим погрешностям в определении угла электропередачи δ. Это оказывает негативное влияние на селективность и устойчивость функционирования. К тому же в рассмотренном способе не обеспечивается отстройка от колебаний при КЗ, не определяется период АР на первом цикле и не предусматриваются резервирующие функции.
Наиболее близким по технической сущности и достигаемым результатам к предлагаемому способу является способ выявления асинхронного режима электропередачи [3], основанный на измерении напряжений и токов в узлах электропередачи, ограничивающих контролируемый участок, и фазового угла ϕ между ними, контроле диапазона углов δ, близких к 180°, существенно отличных от нуля, вычислении приращений в этом диапазоне фазовых углов ϕ1 и ϕ2 между напряжением и током в первом и втором узлах соответственно и фиксации размещения ЭЦК на контролируемом участке, а также слева и справа от него. Фиксация АР производится по факту превышения заданного уровня наибольшим Δϕmax из вычисленных приращений при размещении ЭЦК на контролируемом участке, когда Δϕ1 и Δϕ2 не совпадают по знаку, и на участках слева и справа от него, если знаки Δϕ1 и Δϕ2 одинаковы, а Δϕ1 больше и меньше Δϕ2 по абсолютному значению соответственно. При этом в зависимости от знака контролируемого взаимного скольжения векторов ЭДС по концам электропередачи фиксируют АР с торможением или ускорением.
Способ, выбранный в качестве прототипа, обладает явно выраженными достоинствами в сравнении с рассмотренными выше аналогами:
- повышенной селективностью фиксации АР по контролируемому сечению благодаря большому запасу, обеспечивающему отстройку от глубоких синхронных качаний по задаваемому уровню Δϕmax;
- высокой селективностью нефункционирования при близких внешних АР за счет инвертирования Δϕ1 (Δϕ2) при выходе ЭЦК за границы контролируемого участка;
- селективным распознаванием внешних АР слева и справа от контролируемого участка, позволяющим реализовать функцию резервирования;
- контролем знака взаимного скольжения, расширяющим спектр управляющих воздействий (УВ).
Вместе с тем, этот способ имеет ряд существенных недостатков.
1. Снижение селективности и устойчивости функционирования при удаленных внешних АР, если угол ϕэ существенно отклоняется от расчетного, т.к. при этом уменьшается приращение Δϕ1 (Δϕ2) и нарушается соотношение их величин.
2. Возможность фиксации АР по сечениям, расположенным за контролируемыми внешними сечениями, т.к. зоны размещения ЭЦК при внешних АР не ограничены.
3. Некоторое расширение границ контролируемого участка (до 10%), т.к. все АР (в т.ч. и близкие внешние), сопровождающиеся снижением U1 (U2) до значений, близких к нулю, когда точное измерение (ϕ1 и ϕ2) невозможно, будут восприниматься как АР по заданному сечению.
4. Неспособность распознавания медленных АР, устраняемых в процессе саморесинхронизации без участия автоматики.
5. Возможность ложной фиксации КЗ, особенно в случае их цикличности после неуспешного АПВ.
Эти недостатки свидетельствуют о низком уровне селективности и устойчивости функционирования известного способа.
Задачей, на решение которой направлено заявленное техническое решение, является повышение селективности и устойчивости функционирования.
Технический результат, достигаемый при решении поставленной задачи, проявляется в уменьшении числа отказов, излишних и ложных срабатываний АЛАР, где это изобретение может быть использовано, а также расширении спектра и повышении эффективности УВ, осуществляемых этой автоматикой.
Поставленная задача решается тем, что в способе выявления асинхронного режима электропередачи, включающем измерение напряжения и тока в узле электропередачи и фазового угла между ними, контроль диапазона углов между векторами электродвижущих сил по концам электропередачи, существенно отличных от нуля и включающих значение 180°, фиксацию размещения электрического центра качаний на контролируемом участке, а также слева и справа от него, фиксацию знака взаимного скольжения векторов упомянутых электродвижущих сил, дополнительно измеряют вектор полного сопротивления через отношение векторов напряжения и тока в узле электропередачи, вычисляют координаты конца вектора полного сопротивления в системе координат, полученной путем поворота в комплексной плоскости сопротивлений на расчетный угол и переноса по оси действительных чисел на заданную величину, устанавливают диапазоны значений координаты по оси ординат, соответствующие размещению электрического центра качаний на контролируемом участке электропередачи и смежных участков слева и справа от него, моделируют напряжение в электрическом центре качаний путем умножения координаты по оси абсцисс на модуль вектора тока в точке измерения, задают диапазон значений этого напряжения, соответствующий диапазону углов электропередачи, существенно отличных от нуля и включающих значение 180°, последовательно измеряют первый и второй интервалы времени между моментами входа значений моделируемого напряжения в установленный диапазон, изменения знака этого напряжения и выхода его значений из установленного диапазона, в момент изменения знака моделируемого напряжения фиксируют принадлежность значения координаты конца вектора полного сопротивления по оси ординат одному из заданных диапазонов, по факту прохождения значений моделируемого напряжения через установленный диапазон в случае превышения измеренными интервалами времени заданной величины при ограничении второго интервала другим заданным временем фиксируют наличие асинхронного режима на контролируемом участке, смежных участках слева и справа от него, если зафиксированное значение координаты конца вектора полного сопротивления по оси ординат относится к среднему, левому и правому по этой оси заданным диапазонам соответственно, причем при отрицательном знаке моделируемого напряжения фиксируют асинхронный режим с ускорением, а при положительном знаке фиксируют асинхронный режим с торможением.
Кроме того, при использовании способа в многоступенчатом устройстве автоматики дополнительно отсчитывают число циклов асинхронного режима по моментам изменения знака моделируемого напряжения в установленном диапазоне значений и формируют действие автоматики при превышении числом циклов задаваемой уставки.
Сопоставительный анализ существенных признаков заявляемого решения и существенных признаков аналогов и прототипа свидетельствуют о его соответствии критерию новизны.
Признаки изобретения отличительной части формулы решают следующие функциональные задачи:
1. Признак «...измеряют вектор полного сопротивления через отношение векторов напряжения и тока в узле электропередачи, вычисляют координаты конца вектора полного сопротивления в системе координат, полученной путем поворота в комплексной плоскости сопротивлений на расчетный угол и переноса по оси действительных чисел на заданную величину...» позволяет получить параметры, с помощью которых можно точно установить требуемые диапазоны угла электропередачи 5 и сопротивления от точки измерения до ЭЦК.
2. Признак «...устанавливают диапазоны значений координаты по оси ординат, соответствующие размещению электрического центра качаний на контролируемом участке электропередачи и смежных участков слева и справа от него...» позволяет установить размещение ЭЦК на контролируемом участке сети, слева или справа от него соответственно.
3. Признак «...моделируют напряжение в электрическом центре качаний путем умножения координаты по оси абсцисс на модуль вектора тока в точке измерения...» дает возможность благодаря простой зависимости моделируемого напряжения (Um) от угла δ достаточно точно определять требуемый диапазон его значений по заданному диапазону Um.
4. Признак «...последовательно измеряют первый и второй интервалы времени между моментами входа значений моделируемого напряжения в установленный диапазон, изменения знака этого напряжения и выхода его значений из установленного диапазона...» позволяет, во-первых, обеспечить эффективную отстройку от КЗ при измеренных интервалах Δt1 и Δt2 больше заданного времени (tд) и, во-вторых, исключить фиксацию медленных АР, заканчивающихся самосинхронизацией, если Δt2 меньше критического значения (tкр).
5. Признак «...в момент изменения знака моделируемого напряжения фиксируют принадлежность значения координаты конца вектора полного сопротивления по оси ординат одному из заданных диапазонов...» обеспечивает наиболее точное определение местоположения ЭЦК.
6. Признак «...при отрицательном знаке моделируемого напряжения фиксируют асинхронный режим с ускорением, а при положительном знаке фиксируют асинхронный режим с торможением...» необходим для определения знака взаимного скольжения (производной от δ по времени).
7. Признак «...по факту прохождения значений моделируемого напряжения через установленный диапазон...» свидетельствует о наличии АР, т.к. при СК напряжение Um пересекает при входе в этот диапазон и выходе из него одну и ту же границу.
8. Признак «...в случае превышения измеренными интервалами времени заданной величины при ограничении второго интервала другим заданным временем фиксируют наличие асинхронного режима на контролируемом участке...» обеспечивает отстройку от КЗ и самоустраняющихся АР (см. п.4), причем в зависимости от знака скольжения и местоположения ЭЦК выявляются АР с ускорением и торможением на контролируемом участке сети, а также на смежных участках слева и справа от контролируемого, что повышает селективность способа, давая возможность АЛАР реализовать оптимальные управляющие воздействия.
9. Признак «...отсчитывают число циклов асинхронного режима по моментам изменения знака моделируемого напряжения в установленном диапазоне значений и формируют действие автоматики при превышении числом циклов задаваемой уставки...» позволяет обеспечить согласованное действие ступеней при использовании в многоступенчатом устройстве, а также селективность по отношению к устройствам смежных сечений.
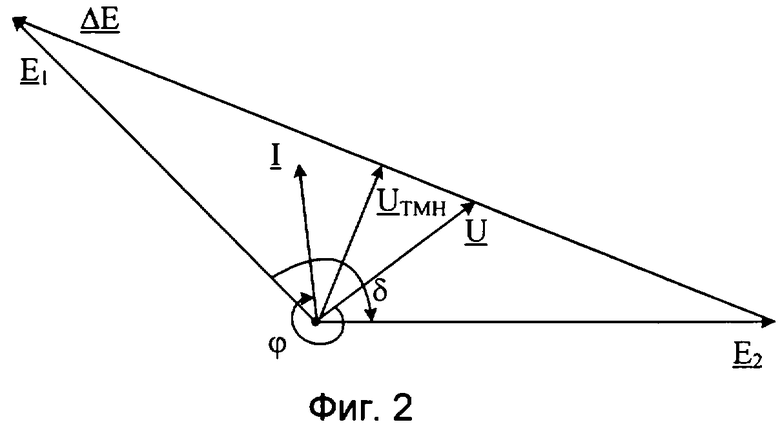
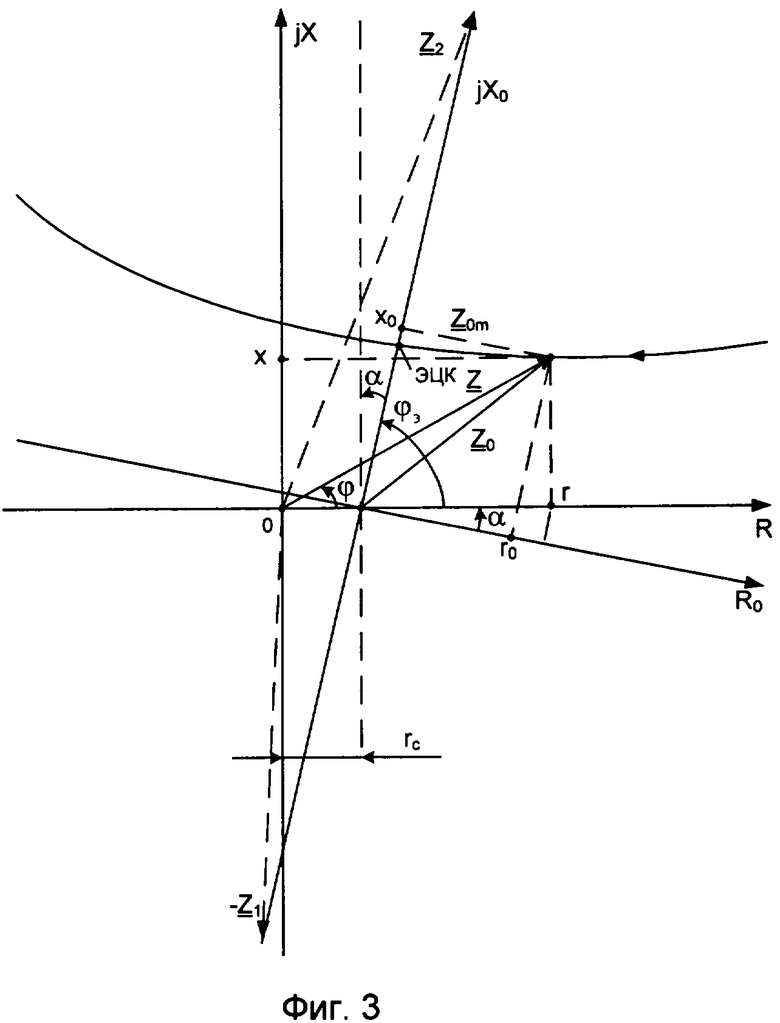
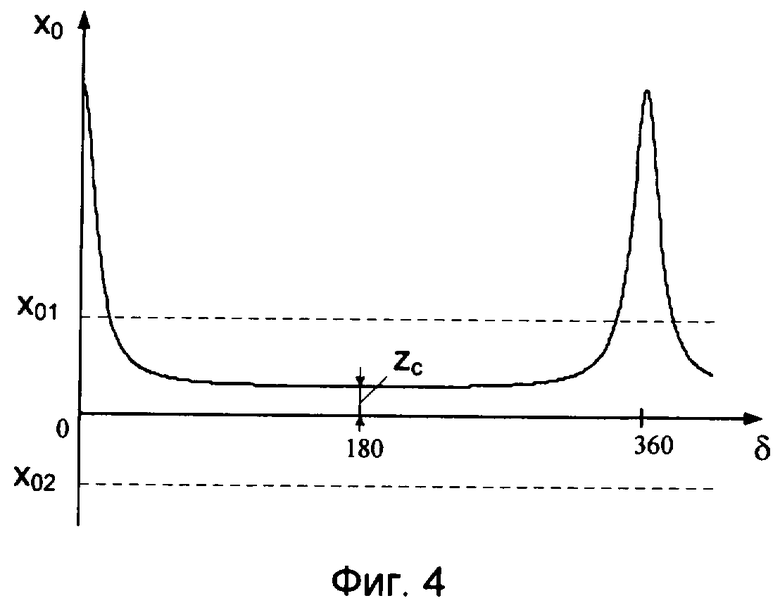
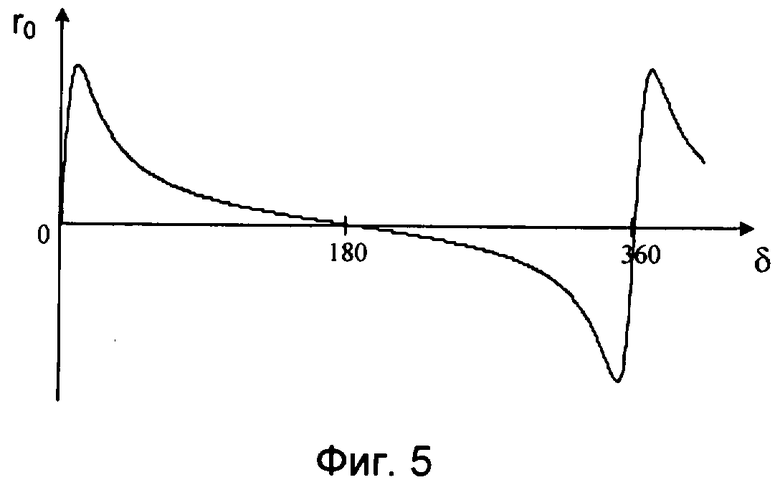
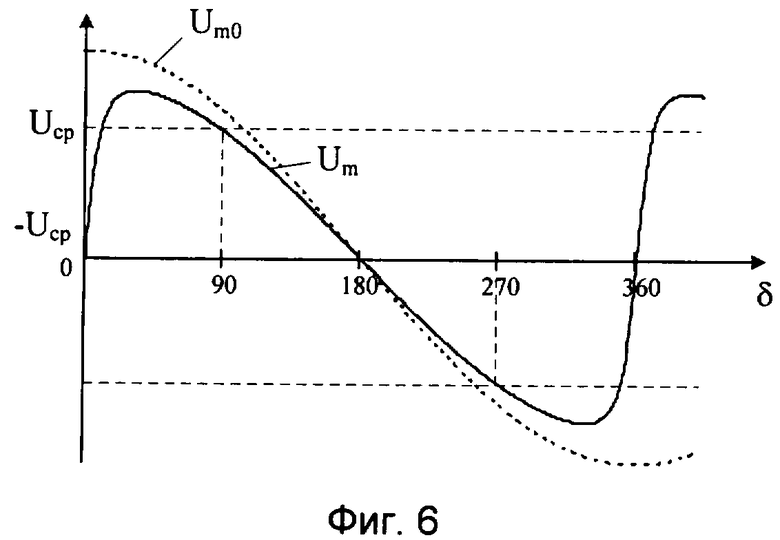
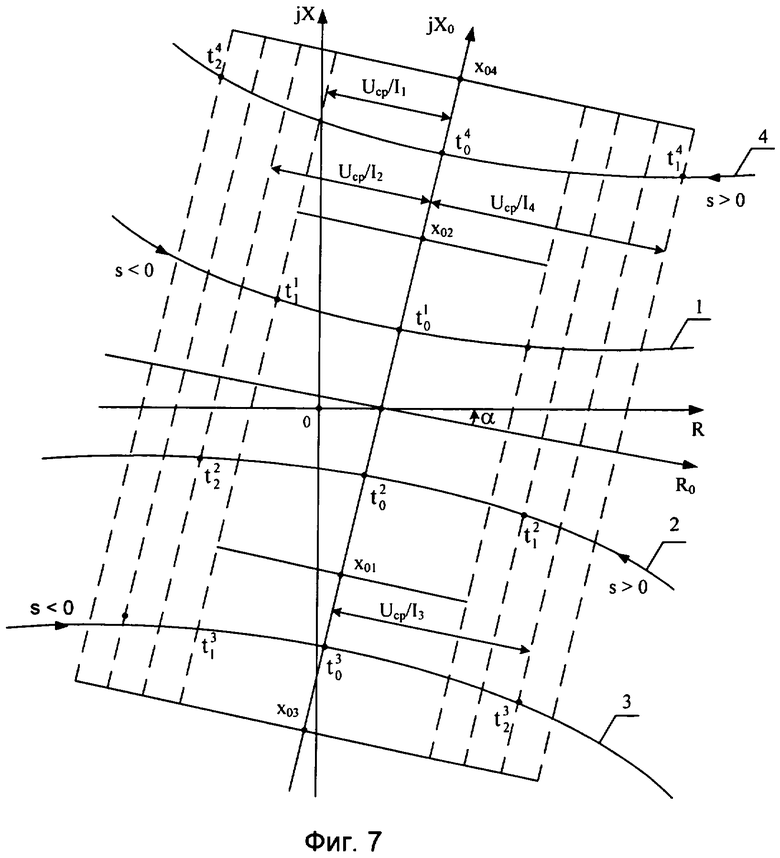
На фиг.1 представлена схема замещения электропередачи; на фиг.2 - векторная диаграмма электропередачи, являющейся эквивалентом ЭС при двухмашинном АР относительно контролируемого узла 0 с напряжением U и током I. На фиг.3 показан годограф измеряемого сопротивления Z=U/I в комплексной плоскости, а также координаты точек в осях R, jX (r, х) и R0, jX0 (r0, x0), повернутых относительно первых осей на расчетный угол α с центром, смещенным по оси R на rс. На фиг.4, 5 и 6 изображены зависимости от угла электропередачи δ (t) вычисляемых координат x0 (фиг.4) и r0 (фиг.5) и моделируемого напряжения Um в сравнении с его простой интерпретацией тригонометрической функцией Um0 (фиг.6). На фиг.7 приведены годографы Z при АР по контролируемому сечению (1-2), а также при внешних АР по сечениям справа (3) и слева (4) от контролируемого. Здесь показаны задаваемые диапазоны значений x0 и Um. На фиг.8 приведена блок-схема реализации предлагаемого способа.
Сущность предлагаемого способа заключается в следующем.
Известно, что годограф сопротивления Z, измеряемого в узле 0 электропередачи (фиг.1), имеет в комплексной плоскости форму окружности, если k=E1/E2≠1, или прямой, если k=1, причем центр окружности находится на оси, совпадающей с вектором Zэ=Z1+Z2 эквивалентного сопротивления электропередачи, а прямая - перпендикулярна этой оси [4, с.30]. На фиг.3 показан годограф Z в о.е. при E2=1, k=1,25, Zэ=1, Z1/Z2=1, ϕ1=arg(Z1)=80°, ϕ2=arg(Z2)=80°. Согласно способу формируется система координат R0, jX0 так, чтобы ось X0 совпадала с вектором  по направлению. Для этого координатную систему R, jX поворачивают на угол α=90°-ϕэ и переносят по оси R на величину rc. Параметры α и rс получают на основании предварительных расчетов пакета АР на контролируемых участках по принципу наибольшего приближения оси jX0 к векторам Zэi (i - номер расчетного режима). Связь координат x0 и r0 любой точки годографа (конца вектора Z) в новой системе описывается известными соотношениями:
по направлению. Для этого координатную систему R, jX поворачивают на угол α=90°-ϕэ и переносят по оси R на величину rc. Параметры α и rс получают на основании предварительных расчетов пакета АР на контролируемых участках по принципу наибольшего приближения оси jX0 к векторам Zэi (i - номер расчетного режима). Связь координат x0 и r0 любой точки годографа (конца вектора Z) в новой системе описывается известными соотношениями:


где z и ϕ - модуль и аргумент Z соответственно.
В полученной системе координат электропередачи (фиг.1) может рассматриваться как однородная (ϕ1=ϕ2=ϕ). При этом минимальное значение х0 (δ=180°) соответствует сопротивлению от точки минимального напряжения (ТМН) на однородной электропередаче, где напряжение равно нулю при δ=180° (r0=0).
Характер изменения x0 и r0 при возрастании δ=arg(E1/E2) показан на фиг.4 и 5. Как видно на фиг.4 и подтверждено расчетами х0 в диапазоне δ=(60÷300)° с приемлемой точностью соответствует сопротивлению Zc от точки 01 до ЭЦК  , совпадая с ним при δ=180°. При этом знак хо определяется направлением отсчета. При его совпадении с направлением оси jX0 - знак положителен, в противном случае отрицателен.
, совпадая с ним при δ=180°. При этом знак хо определяется направлением отсчета. При его совпадении с направлением оси jX0 - знак положителен, в противном случае отрицателен.
Следовательно, по знаку x0 можно судить о размещении ЭЦК по одну или другую сторону от точки 01. Задание диапазонов значений хо дает возможность фиксировать местоположение ЭЦК на контролируемом участке, а также слева и справа от него, как признак АР по своему и внешним сечениям.
Координата r0 (фиг.5) соответствует сопротивлению, измеряемому в ТМН  , где UTMH - модуль напряжения в ТМН, а I - модуль тока электропередачи). Знак r0 положителен при δ=(0÷180)° и отрицателен при δ=(180÷360)°.
, где UTMH - модуль напряжения в ТМН, а I - модуль тока электропередачи). Знак r0 положителен при δ=(0÷180)° и отрицателен при δ=(180÷360)°.
Моделируемое напряжение Um=r0·I совпадает по знаку с r0, а по модулю - с UTMH (фиг.6). Переход Um через нулевое значение свидетельствует о превышении углом δ значения 180° и развитии АР. Следовательно, с помощью Um благодаря его большой информативности в сравнении с UTMH можно фиксировать факт возникновения АР. Кроме того, напряжение Um в определенном диапазоне значений, включающих нулевое, может быть с приемлемой погрешностью представлено простой тригонометрической функцией от угла δ:

где Ua - амплитудное значение.
В этом нетрудно убедиться, если найти Um как высоту треугольника, образованного векторами E1, Е2 и ΔЕ, совпадающую с вектором UTMH (фиг.2):

С учетом известных ограничений (0,8<k<1,25 при E1(2)=(0,9÷1,1)·Uн, где Uн - номинальное напряжение [1, с.19]) в предположении, что 2·k/(1+k2)=1, формула (4) приводится к виду (3) с погрешностью не более 1,5% в диапазоне δ=(60÷300)°, причем эта погрешность на превысит (5÷10)%, если принять Ua=Uн.
Таким образом, задаваемый диапазон Um будет строго соответствовать контролируемому диапазону углов δ, существенно отличных от нуля и включающих значение 180°, если его границы не выходят за пределы (60÷300)°, когда Um и δ жестко связаны по (3). Иллюстрацией этому служит фиг.6, где установлен диапазон

Здесь Ucp/Uн=0,707, что определяет 90°<δ<270°.
Измерение интервалов Δt1 от момента t1 входа значений Um в установленный диапазон до момента t0 изменения знака этого напряжения (Δt1=t0-t1) и Δt2 от момента t0 до момента t2 выхода Um из установленного диапазона (Δt2=t2-t0) позволяет реализовать условия отстройки от фиксации циклических КЗ:


где tд - заданное (допустимое) время.
Время tд выбирается, исходя из максимально возможной разности частот Δfm, асинхронно идущих групп генераторов (эквивалентных ЭДС электропередачи):
где Δδ=δ(t0)-δ(t1)=δ(t2)-δ(t0) при равных по модулю граничных значениях заданного диапазона Um, как в (5).
Фактически по (8) ограничиваются средние значения скольжения на интервалах Δt1 (s1=Δδ/Δt1) и Δt2 (s2=Δδ/Δt2), которые не должны превышать sд=2·π·Δfm. Практика показывает, что на первом-втором цикле АР разность частот Δfm≤(2÷3)Гц, а Δδ легко определяется по (3) и (5) при заданном Ucp.
Кроме того, измерение Δt2 дает возможность исключить фиксацию медленных АР, не требующих вмешательства автоматики и устраняемых в ходе самосинхронизации. Для этого Δt2 ограничивается условием
где tкр - расчетное критическое время, соответствующее критическому скольжению sкр, превышение которого исключает возможность самосинхронизации (tкр=Δδ/sкр).
Фиксация значения х0 в момент t0 обеспечивает, как указывалось выше, его наибольшее соответствие сопротивлению Zc до ЭЦК. При этом наличие АР на контролируемом участке, а также слева и справа от него после фиксации самого факта возникновения АР устанавливается по принадлежности хо трем заданным диапазонам соответственно:



где x01, х02, x03 и х04 - расчетные граничные значения x0.
Факт возникновения АР фиксируется по прохождению установленного диапазона, например, согласно (5) от Ucp (δ(t1)<180°) до -Ucp (δ(t2)>180°) или наоборот. В первом случае имеет место положительное скольжение (АР с ускорением), а во втором - отрицательное (АР с торможением). Следовательно, знак скольжения всегда противоположен знаку Um при выходе его значений из заданного диапазона.
На фиг.7 приведены годографы Z при АР по контролируемому сечению (1, 2) и смежным сечениям слева (3) и справа (4) от него. Здесь же показаны граничные значения х0, заданные по (10)-(12), и r0, соответствующие Ucp в (5) с учетом того, что r0=Um/Ii, где i - номер режима (годографа). Кроме того, на годографах указаны их направления, определяющие знак скольжения s, и отмечены моменты времени  ,
,  и
и  входа Um (r0) в установленный диапазон изменения его знака и выхода из этого диапазона соответственно.
входа Um (r0) в установленный диапазон изменения его знака и выхода из этого диапазона соответственно.
Следует заметить, что в плоскости сопротивлений границы, определяемые по (5), не фиксированы, так как связаны с током Ii электропередачи, изменяющегося от режима к режиму. Однако в каждом из них эти границы соответствуют значениям δ, вычисляемым по (3) при Ucp (-Ucp).
Фиксация АР осуществляется в моменты  по сечению, определяемому условиями (10)-(12), со знаком скольжения, противоположным знаку Um
по сечению, определяемому условиями (10)-(12), со знаком скольжения, противоположным знаку Um , если соблюдаются ограничения, задаваемые по (5)-(7) и (9).
, если соблюдаются ограничения, задаваемые по (5)-(7) и (9).
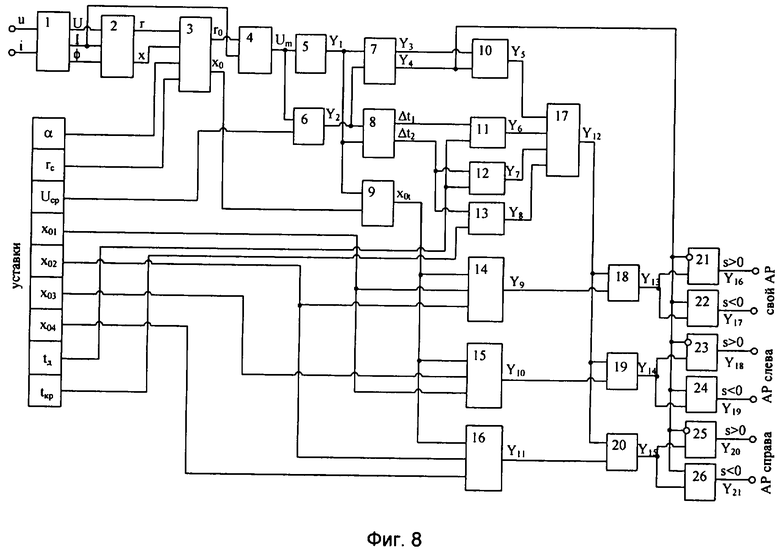
На фиг.8 представлена блок-схема реализации предлагаемого способа.
Схема содержит блок 1 датчиков тока и напряжения, вычислитель 2 сопротивления, преобразователь 3 координат, блок 4 моделирования напряжения Um, определитель 5 знака моделируемого напряжения, блок 6 контроля диапазона изменения Um, фиксатор 7 знаков моделируемого напряжения при входе и выходе из установленного диапазона, измеритель 8 промежутков времени, фиксатор 9 величины x0 в момент смены знака Um, логический элемент 10 «ИСКЛЮЧАЮЩЕЕ ИЛИ», блоки 11-12 сравнения «больше», блок 13 сравнения «меньше», блоки 14-16 контроля диапазона изменения х0, конъюнкторы 17-26 (логические элементы «И»).
Схема работает следующим образом. Мгновенные величины напряжения u и тока i от измерительных трансформаторов поступают на входы блока 1, где осуществляется их обработка, в результате которой определяются действующие значения напряжения U и тока I, а также фазовый угол ϕ между ними. По этим данным вычисляют активную r и реактивную х составляющие комплексного сопротивления Z. В блоке 3 по выражениям (1-2) определяются преобразованные координаты r0 и x0 путем поворота координатных осей на угол α и смещения центра координат вдоль оси R на величину rс. Затем в блоке 4 вычисляется моделируемое напряжение Um=r0·I.
Определение знака Um производят блоком 5, где поверяется условие Um>0. В случае истинности данного условия на выход Y1 поступает логическая единица. Рабочий диапазон изменения Um по условию (5) отслеживают с помощью блока 6. Выходной сигнал Y2 принимает значение «I» при выполнении условия (5). В блоке 7 осуществляют фиксацию знаков моделируемого напряжения в моменты входа и выхода из установленного диапазона изменения Um. На выходе Y3 устанавливается логическая единица, если Um положителен в начальный момент t1, когда Y2 принимает единичное значение. В момент t2 обратного изменения величины Y2 с единицы на «0» формируется единичное значение на выходе Y4 только в случае положительности Um. Блок 8 производит отсчет промежутков времени Δt1 (от момента t1 до момента t0 изменения значения Y1) и Δt2 (от t0 до t2). Величина x0 фиксируется в момент t0 на выходе x0t блока 9.
В блоке 10 для отстройки от синхронных качаний осуществляется проверка совпадения знаков Um при входе и выходе из рабочего диапазона. Этот блок представляет собой логический элемент «ИСКЛЮЧАЮЩЕЕ ИЛИ», на выходе Y5=Y3⊕Y4 которого появляется «1» при несовпадении величин Y3 и Y4, что соответствует сквозному прохождению годографом сопротивления области δ≈180°. Отстройка от КЗ реализуют в блоках 11 и 12, где контролируются условия (6) и (7) соответственно. В случае истинности этих условий формируются единичные логические сигналы Y6, и Y7. В блоке 13 проверяется отсутствие условий самосинхронизации по величине Δt2. При выполнении условия (9) на выходе Y8 появляется «1». Блоки 14, 15 и 16 предназначены для определения сечения АР посредством контроля условий (10), (11) и (12) соответственно. Если АР развивается по своему сечению, то «1» будет зафиксирована на выходе Y9. При размещении ЭЦК слева от контролируемого участка сигнал Y10 принимает значение «1». Когда сечение АР находится справа, то единица появится на выходе Y11.
Блок 17 реализует операцию логического умножения результатов проверки условий, выполнение которых необходимо для выявления АР. Сигнал Y12=Y5·Y6·Y7·Y8 далее используется в конъюнкторах 18-20, где на одном из выходов Y13=Y12·Y9, Y14=Y12·Y10 или Y15=Y12·Yn появляется «1» при выявлении АР по контролируемому сечению, слева или справа от него соответственно.
На последней стадии производят распознавание знака скольжения и дифференциацию в зависимости от него выходных сигналов предлагаемого алгоритма с помощью конъюнкторов 21-26. Знак скольжения определяется на основании знака Um в момент t2 (величина Y4). В результате с учетом информации о размещении ЭЦК возможно формирование управляющих сигналов по следующим выходам:  (АР по контролируемому сечению, s>0), Y17=Y4·Y13 (АР по контролируемому сечению, s<0),
(АР по контролируемому сечению, s>0), Y17=Y4·Y13 (АР по контролируемому сечению, s<0),  (АР слева, s>0), Y19=Y4·Y14 (АР слева, s<0),
(АР слева, s>0), Y19=Y4·Y14 (АР слева, s<0),  (АР справа, s>0), Y21=Y4·Y15, (АР справа, s<0).
(АР справа, s>0), Y21=Y4·Y15, (АР справа, s<0).
Отсчет циклов АР может быть реализован на базе рассмотренной блок-схемы с помощью элементарных логических и арифметических операций.
Источники информации
1. Гоник Я.Е. Обобщенные способы выявления асинхронного хода в энергосистеме: Тр. института «Энергосетьпроект», вып.4. - М.: Энергия, 1974, с.87-104.
2. Патент RU 2204877 С1, МКП Н02Н 3/48, 2003 г.
3. Патент SU 1663691 A1, МКП H02J 3/24, 1991 г.
4. Гоник Я.Е., Иглицкий Е.С. Автоматика ликвидации асинхронного режима. - М.: Энергоатомиздат, 1988.
Изобретение относится к электротехнике и может быть использовано для противоаварийного управления энергосистемой при возникновении в ней асинхронного режима. В способе вычисляют координаты конца вектора полного сопротивления в системе координат, полученной путем поворота в комплексной плоскости сопротивлений на расчетный угол и переноса по оси действительных чисел на заданную величину. Моделируют напряжение в электрическом центре качаний и контролируют диапазон значений этого напряжения, соответствующий диапазону углов электропередачи, существенно отличных от нуля и включающих значение 180°. Асинхронный режим фиксируют при выходе величины моделируемого напряжения из установленного диапазона, если знак напряжения отличается от знака этого же напряжения при входе в указанный диапазон, а длительность прохождения установленного диапазона превышает заданную величину. Размещение электрического центра качаний определяют в момент изменения знака моделируемого напряжения по принадлежности значения координаты конца вектора полного сопротивления по оси ординат одному из трех заданных диапазонов. Дополнительно отсчитывают число циклов асинхронного режима по моментам изменения знака моделируемого напряжения в установленном диапазоне значений и формируют действие автоматики при превышении числом циклов задаваемой уставки. В способе повышается селективность и устойчивость функционирования автоматики, количество неправильных действий автоматики и увеличивается спектр управляющих воздействий, осуществляемых этой автоматикой. 1 з.п. ф-лы, 8 ил.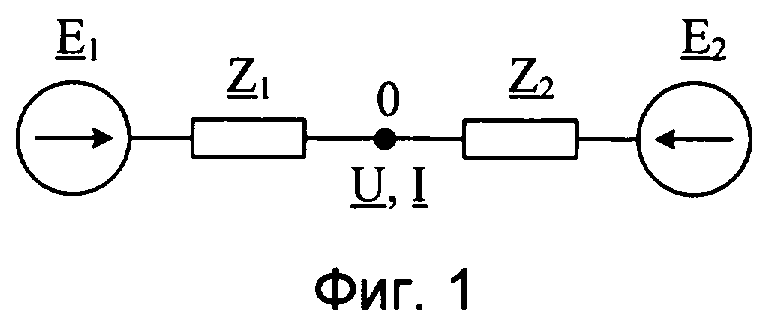
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА | 2000 |
|
RU2199807C2 |
| СПОСОБ ВЫЯВЛЕНИЯ И ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ УСТРОЙСТВОМ АВТОМАТИКИ | 2001 |
|
RU2204877C1 |
| RU 20442246 C1, 20.08.1995 | |||
| ДЛЯ ПРОДАЖИ ШТУЧНЫХ ТОВАРОВ | 0 |
|
SU166193A1 |
| Устройство для выявления асинхронного хода в энергосистеме на первом цикле | 1980 |
|
SU868919A1 |
| US 4538197 A 27.08.1985 | |||
| DE 3007181 A1, 04.09.1980 | |||
| Приспособление для изготовления круглых ремней | 1930 |
|
SU27757A1 |
| WO 9919956 B1, 22.04.1999. | |||

