Изобретение относится к электротехнике, в частности к противоаварийной автоматике энергосистем и может быть использовано, например, в автоматике ликвидации асинхронного режима (АЛАР) и автоматике предотвращения нарушения устойчивости (АПНУ).
Известен способ выявления угрозы и факта возникновения асинхронного режима (АР) в энергосистеме, основанный на контроле величины угла δ12 между векторами U1 и U2 напряжений u1 и u2 в первой и второй точках системы и используемый, например, в устройстве для предотвращения АР [1].
Выявление происходит при
δ12> δср.i, (1) ,
где δср.i - угол срабатывания i-ой ступени, причем те ступени, для которых δср< δкр выявляют угрозу возникновения АР, а ступени с δср> δкр фиксируют факт возникновения АР (δкр - критический угол, определяющий границу устойчивости и равный в зависимости от исходного режима 120...180o).
Недостатком известного способа является низкая селективность, обусловленная тем, что при δср< δкр не представляется возможным отличить АР от глубоких синхронных качаний (СК).
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является способ, используемый в микропроцессорном (МП) устройстве [2].
Здесь, наряду с контролем δ12 , дополнительно контролируют взаимное скольжение s12 векторов  по условию:
по условию:
s12 > sдоп, (2)
Благодаря этому можно прогнозировать возникновение АР при δ < δкр , если sдоп вычислять в соответствии с граничной фазовой траекторией "скольжение - угол" в зависимости от параметров исходного режима, обеспечивая при этом надежную отстройку от СК. Вычисление sдоп можно выполнить либо предварительно, либо в текущем режиме, например, по формуле, апроксимирующей граничную траекторию [3, ф. (173)]:
δ12+k1•Sдоп+k2•δ0= δ
где δ0 - значение δ12 в исходном режиме, δ
В первом случае упрощена реализация, но требуется загрубление по sдоп, чтобы учесть весь набор исходных режимов, что приведет к замедлению выявления угрозы АР и снижению эффективности управляющих воздействий. В этом смысле вычисление sдоп в текущем режиме предпочтительней и легко реализуется в МП - устройстве.
Недостатком известного способа является ограниченная селективность по отношению к АР по внешним сечениям, особенно в системах сложной конфигурации. Дело в том, что эффективность способа тем выше, чем ближе значения угла δ12 между векторами U1 и U2 и угла δ между векторами E1 и E2 электродвижущих сил (ЭДС) по концам электропередачи (фиг. 1, а), эквивалентирующей энергосистему относительно контролируемого сечения 1 с напряжением U0 и током I. Напряжение Uj в любой j-ой точке электропередачи получают обычно путем моделирования:
Uj = U0 + Zmj • I, (4)
где Zmj - сопротивление моделирования, знак которого положителен при расположении точек приложения Uj между E2 и контролируемым сечением и отрицателен в противном случае.
Условие δ12≈ δ осуществимо при Zmi≈Z1 и Zm2≈Z2 как это видно из векторной диаграммы (фиг.1, б). Однако в пакете расчетных схем энергосистемы параметры Z1 и Z2 эквивалентной электропередачи могут изменяться в довольно широких пределах и оптимальным следует считать выбор сопротивлений моделирования по условиям
Zm1 = Z1ср, (5)
Zm2 = Z2ср, (6)
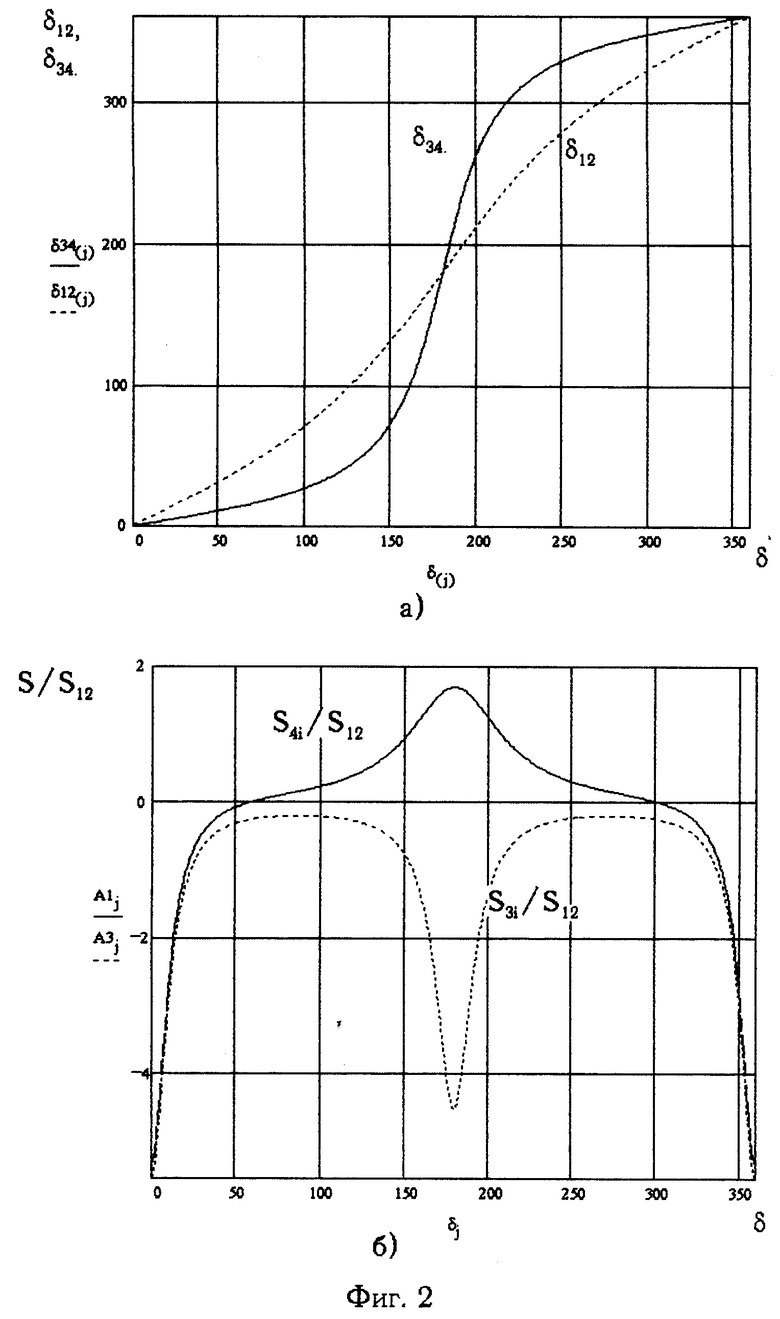
где Z1ср и Z2ср - средние значения Z1 и Z2 в пакете расчетных схем. При этом значения δ и δ12 (фиг. 2, а) весьма близки, но возможна фиксация внешних АР или угрозы их возникновения, когда ЭЦК размещен между моделируемыми точками 1 и 2. Чтобы избежать этого, практически в известном способе ограничивают Zm1 и Zm2 таким образом, чтобы исключить попадание ЭЦК в зону между точками приложения U1 и U2 при внешнем АР. Но тогда резко нарушается соответствие углов δ и δ12. Например, для точек 3 и 4 (Zm3 <Zm1 и Zm4 <Zm2) угол δ34< 90°, в то время как угол δ уже близок к 180o (фиг. 2, а). Следовательно, даже при δср< 90° предотвратить АР уже невозможно и эффективность способа сводится к минимуму.
Задачей, на решение которой направлено заявленное предложение, является повышение селективности. Получаемый при этом технический результат проявляется в исключении ложных срабатываний устройства АЛАР или АПНУ, где изобретение может быть использовано, при своевременной фиксации угрозы или факта АР. В результате этого снижается тяжесть системных аварий и ущерб, наносимый ими.
Поставленная задача решается тем, что в известном способе выявления угрозы и факта возникновения асинхронного режима в энергосистеме, включающем контроль напряжений u1 и u2 в первой и второй точках энергосистемы, выбираемых по условию максимального приближения их значений к значениям электродвижущих сил e1 и e2 по концам эквивалентной электропередачи для каждой расчетной схемы энергосистемы, согласно которому измеряют угол δ12 между векторами U1 и U2 напряжений u1 и u2 и взаимное скольжение s12 этих векторов, выявляет угрозу и факт возникновения асинхронного режима, если абсолютные значения δ12 и s12 больше заданных δср и sдоп соответственно, различают факт и угрозу возникновения асинхронного режима соответственно по наличию и отсутствию превышения абсолютным значением δ12 расчетного критического δкр, определяемого для каждого исходного режима, причем sдоп вычисляют по граничным фазовым траекториям "скольжение угол" также с учетом параметров исходного режима, дополнительно осуществляют контроль тока i в заданном сечении энергосистемы и напряжений u3 и u4 в третьей и четвертой точках энергосистемы, выбираемых по условию размещения между ними электрического центра качаний только в асинхронных режимах по заданному сечению, вычисляют взаимные скольжения s3i и s4i векторных пар U3, I и U4, I, а также отношения s3i к s12 и s4i к s12, определяют знаки этих отношений и их несовпадение учитывают в качестве дополнительного условия выявления угрозы и факта возникновения асинхронного режима.
Сопоставительный анализ признаков предложенного решения и признаков аналога и прототипа свидетельствует о его соответствии критерию "новизна".
Признаки отличительной части формулы решают следующие функциональные задачи:
1. Контроль напряжений U3 и U4 необходим для выделения зоны размещения ЭЦК при АР по контролируемому сечению.
2. Вычисление скольжений s3i и s4i векторных пар U3, I и U4, I, а также знака последних позволяет учесть несоответствие этих знаков, как условие АР по контролируемому сечению при углах δ > 60 - 70°.
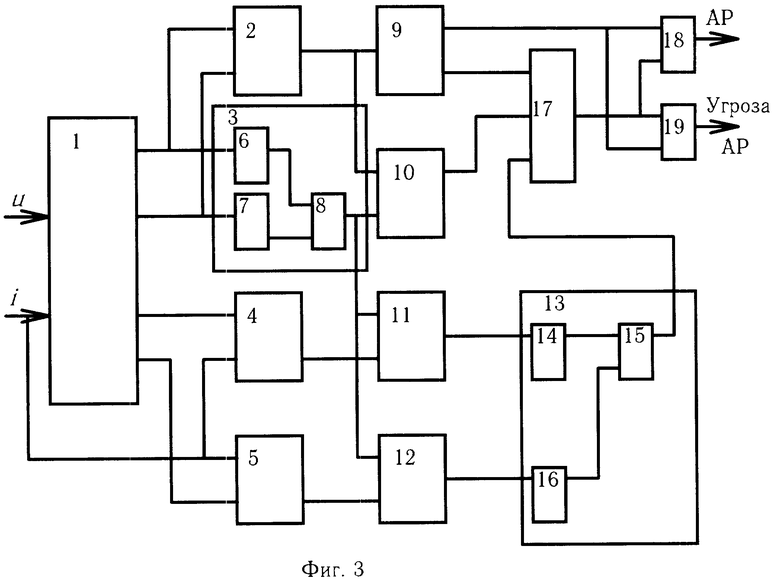
На фиг. 1 представлены схема эквивалентной электропередачи (а) и ее векторная диаграмма (б); на фиг. 2 - зависимости некоторых параметров от угла 5 между ЭДС E1 и E2 по концам электропередачи; на фиг. 3 - функциональная схема, реализующая предложенный способ.
Схема содержит блок 1 моделирования, датчик 2 угла, датчики 3, 4 и 5 скольжения, блоки 9 и 10 сравнения, устройства деления 11 и 12, блок 13 фиксации несовпадения знаков входных сигналов, логические элементы 17 типа ЗИ и 18, 19 типа 2И (элемент 19 с инверсным вторым входом).
Блок 1 формирует выходные напряжения Uj (j - номер выхода), пропорциональные напряжениям Uj в моделируемых согласно (4) точках энергосистемы (j - номер точки)
U1j = kuUj, (7)
где ku - коэффициент пропорциональности, учитывающий коэффициенты передачи измерительных трансформаторов и преобразователей (датчиков) в тракте напряжения.
Блок 1 может быть выполнен подобно блоку 3 в [1, фиг. 1].
Датчик 2 угла формирует на выходах напряжение U2 пропорциональное разности фаз δ12 между входными напряжениями U1.1 и U1.2 (U1 и U2) и может быть выполнен по любым известным схемам [3, разд. 20]. Датчики скольжения 3, 4 и 5 однотипны и могут быть выполнены с помощью двух датчиков частоты и вычитателя (блоки 6, 7 и 8 датчика 3), как в [3, рис. 78].
Блок 9 осуществляет сравнение напряжения U2 ≡ δ12 c Uср.1≡ δср.1 по первому выходу и c Uср.2≡ δср.2 по второму выходу в соответствии с (1), причем δср.1 принимается равным δкр и вычисляется в зависимости от исходного значения δ0 угла δ12(δср.1= π - δ0), а δср.2< δкр . Блок 9 легко реализуется с помощью двух компараторов, выходы которых служат выходами блока и инерционного звена для запоминания U20≡ δ0 , подобного используемому в известном органе [3, рис. 80].
Блок 10 реализует условие (2), оперируя с напряжениями U3 ≡ s12 и Uдоп = sдоп, причем sдоп определяется по формуле (3).
Блок 13 выполнен с помощью нульиндикаторов 14 и 16 и логического элемента 15 типа ИСКЛЮЧАЮЩЕЕ ИЛИ. Каждый нульиндикатор преобразует входной непрерывный сигнал в дискретный двух уровней (логические О и 1), каждому из которых соответствует свой знак входного сигнала (положительный или отрицательный). Несовпадение этих знаков приводит к срабатыванию элемента 15.
Блоки 11, 12, 17 - 19 имеют типовую реализацию.
Схема работает следующим образом.
Напряжение u и ток i, контролируемого сечения поступают через измерительные трансформаторы на входы блока 1 моделирования. Напряжения U1.1 - U1.4 на его выходах, согласно (7) пропорциональные напряжениям U1 - U4 соответственно в моделируемых точках энергосистемы (фиг. 1, а, б), причем напряжения U1 и U2 выбраны по условию наибольшего приближения к E1 и E2 с учетом (5) и (6), а напряжения U3 и U4 выбраны исходя из того, что ЭЦК между точками их приложения может размещаться только в АР по контролируемому сечению 1.
Векторные группы U1 - U4 и U1.1 - U1.4 отличаются только масштабом модулей, входящих в них векторов, в то время как их угловые и частотные характеристики идентичны. Поэтому их выходные напряжения U2 - U5 датчиков 2 - 5 равны, соответственно:
где δ12 и s12 - угол между векторами U1 и U2 и их взаимное скольжение; s3i и s4i - взаимные скольжения векторных пар U3, I и U4, I, соответственно; kδ и ks - коэффициенты пропорциональности.
Сигнал U2 поступает на входы блоков 9 и 10. Блок 9 срабатывает по второму выходу при U2 > Uср.2 (δ12> δср.2). Для фиксации угрозы АР принимают δ ,
,
где ϕ3i и ϕ4i - углы между векторами U3, I и U4, I, соответственно.
С учетом обозначений на фиг. 1 и коэффициентов k = Е1/Е2,  , где Zj - сопротивление от точки приложения E1 до j-ой точки электропередачи, можно получить следующие соотношения (δ12≈ δ):
, где Zj - сопротивление от точки приложения E1 до j-ой точки электропередачи, можно получить следующие соотношения (δ12≈ δ): .
.
Зависимости (14) и (15) показаны на фиг. 2, б для АР по контролируемому сечению при k > 1. Для точки 3β3> 1(α3< αц) угол ϕ3i изменяется монотонно (растет или уменьшается) и  (кривая 1) не изменяет свой знак в цикле АР. Для точки 4β4> 1(α4< αц) угол ϕ4i колеблется в цикле АР около некоторого значения и знак
(кривая 1) не изменяет свой знак в цикле АР. Для точки 4β4> 1(α4< αц) угол ϕ4i колеблется в цикле АР около некоторого значения и знак  меняется дважды за цикл (кривая 2). Однако в рабочем диапазоне углов δр< δ < 2π - δр знаки
меняется дважды за цикл (кривая 2). Однако в рабочем диапазоне углов δр< δ < 2π - δр знаки  и
и  всегда противоположны в АР по контролируемому сечению. При внешнем АР обе кривые 1 и 2 однотипны и знаки U11 и U12 совпадают.
всегда противоположны в АР по контролируемому сечению. При внешнем АР обе кривые 1 и 2 однотипны и знаки U11 и U12 совпадают.
Наибольшую величину δр можно определить из (14) и (15) при U11 = 0 или U12 = 0 для случаев β > 1 при k > 1 и β < 1 при k <1:
δр= arccos[(β - k)/(kβ - 1)] (16) .
Как показывают расчеты, максимальное значение δр не превышает (60 - 70)o при достаточном удалении α от αц (на 0,1 и более).
Таким образом, при АР по контролируемому сечению знаки U11 и U12 не совпадают (δср.2≥ δр) и срабатывает блок 13 (U13 > 0). Вслед за этим срабатывает элемент 17, так как все его входные сигналы положительны и элемент 19, фиксирующий угрозу АР. После возникновения АР блок 9 срабатывает по первому выходу (U9.1 > 0), т.к. U2 > Uср.1 = Uкр(δ12> δкр), вызывая возврат элемента 19 и срабатывание элемента 18 фиксирующего факт возникновения АР.
В заключении отметим, что предлагаемый способ превосходит по селективности известный благодаря более точной оценке δ12 и s12 при надежной отстройке от внешних АР по дополнительному условию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА В ЭНЕРГОСИСТЕМЕ | 2006 |
|
RU2316098C1 |
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА | 2000 |
|
RU2199807C2 |
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОПЕРЕДАЧИ | 1997 |
|
RU2117374C1 |
| СПОСОБ ВЫЯВЛЕНИЯ И ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ УСТРОЙСТВОМ АВТОМАТИКИ | 2006 |
|
RU2316099C1 |
| УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОПЕРЕДАЧИ | 1993 |
|
RU2064727C1 |
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОПЕРЕДАЧИ | 1993 |
|
RU2042246C1 |
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОПЕРЕДАЧИ | 2006 |
|
RU2316101C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ СИНХРОННОЙ НАГРУЗКИ | 1992 |
|
RU2076421C1 |
| УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОПЕРЕДАЧИ | 1993 |
|
RU2064726C1 |
| РЕЛЕ ПЕРЕМЕННОГО ТОКА | 1994 |
|
RU2097892C1 |
Изобретение относится к электротехнике, в частности, к противоаварийной автоматике энергосистем / ЭС/ и может быть использовано, например, в автоматике ликвидации асинхронного режима /АЛАР/. Сущность изобретения заключается в том, что в известном способе, включающем контроль напряжений u1 и u2 в первой и второй точках ЭС, выбираемых по условию оптимального моделирования эквивалентных электродвижущих сил электропередачи в АР, согласно которому измеряют угол δ12 между векторами U1 и U2 напряжений u1 и u2 и взаимное скольжение s12 этих векторов, выявляет угрозу и факт возникновения АР, если абсолютные значения δ12 и s12 больше заданных δ12 и sдоп соответственно, различают факт и угрозу возникновения АР соответственно по наличию и отсутствию повышения абсолютным значением δ12 расчетного критического δкр, дополнительно осуществляют контроль тока в заданном сечении ЭС и напряжений u3 и u4 третьей и четвертой точках ЭС, выбираемых по условию размещения между ними электрического центра качаний только в АР по заданному сечению, вычисляют взаимные скольжения s3i и s4i векторных пар  , а также отношения s3iк s12 и s4i к s12, определяют знаки этих отношений и их несовпадение учитывают в качестве дополнительного условия выявления угрозы и факта возникновения АР. Технический результат проявляется в повышении селективности способа. 3 ил.
, а также отношения s3iк s12 и s4i к s12, определяют знаки этих отношений и их несовпадение учитывают в качестве дополнительного условия выявления угрозы и факта возникновения АР. Технический результат проявляется в повышении селективности способа. 3 ил.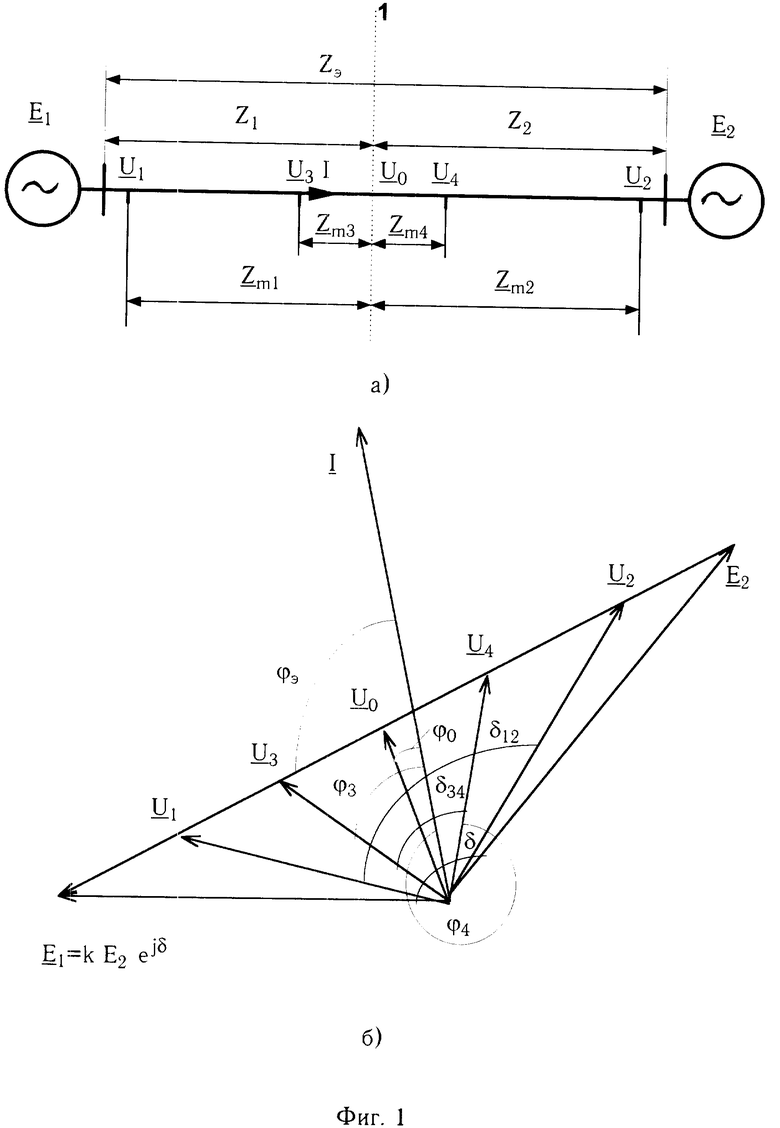
Способ выявления угрозы и факта возникновения асинхронного режима в энергосистеме, включающий контроль напряжений u1 и u2 в первой и второй точках энергосистемы, выбираемых по условию максимального приближения их значений к значениям электродвижущих сил е1 и е2 по концам эквивалентной электропередачи для каждой расчетной схемы энергосистемы, согласно которому измеряют угол δ12 между векторами  и
и  напряжений u1 и u2 и взаимное скольжение S1 2 этих векторов, выявляют угрозу и факт возникновения асинхронного режима, если абсолютные значения δ12 и S1 2 больше заданных δср и Sд о п, соответственно различают факт и угрозу возникновения асинхронного режима по соответственно наличию и отсутствию превышения абсолютным значениям δ12 расчетного критического δкр определяемого для каждого исходного режима, причем Sд о п вычисляют по граничным фазовым траекториям "скольжение-угол" также с учетом параметров исходного режима, отличающийся тем, что дополнительно осуществляют контроль тока i в заданном сечении энергосистемы и напряжений u3 и u4 в третьей и четвертой точках энергосистемы, выбираемых по условию размещения между ними электрического центра качаний только в асинхронных режимах по заданному сечению, вычисляют взаимные скольжения S3 i и S4 i векторных пар
напряжений u1 и u2 и взаимное скольжение S1 2 этих векторов, выявляют угрозу и факт возникновения асинхронного режима, если абсолютные значения δ12 и S1 2 больше заданных δср и Sд о п, соответственно различают факт и угрозу возникновения асинхронного режима по соответственно наличию и отсутствию превышения абсолютным значениям δ12 расчетного критического δкр определяемого для каждого исходного режима, причем Sд о п вычисляют по граничным фазовым траекториям "скольжение-угол" также с учетом параметров исходного режима, отличающийся тем, что дополнительно осуществляют контроль тока i в заданном сечении энергосистемы и напряжений u3 и u4 в третьей и четвертой точках энергосистемы, выбираемых по условию размещения между ними электрического центра качаний только в асинхронных режимах по заданному сечению, вычисляют взаимные скольжения S3 i и S4 i векторных пар  а также отношения S3 i к S1 2 и S4 i к S1 2 определяют знаки этих отношений и их несовпадение учитывают в качестве дополнительного условия выявления угрозы и факта возникновения всинхронного режима.
а также отношения S3 i к S1 2 и S4 i к S1 2 определяют знаки этих отношений и их несовпадение учитывают в качестве дополнительного условия выявления угрозы и факта возникновения всинхронного режима.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1026232, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бринкис К.А., Бочкарев Г.И., Саухатас А.-С.С | |||
| Микропроцессорное устройство предотвращения асинхронного хода | |||
| - Электроэнергетика, 1990, N 2, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Роземблюм Ф.М | |||
| Измерительные органы противоаварийной автоматики энергосистемы | |||
| - М.: Энергоиздат, 1981, с | |||
| Катодное реле | 1918 |
|
SU159A1 |
