Изобретение относится к системам управления оружием и может быть использовано для корректировки траектории летящей ракеты в двух взаимно перпендикулярных плоскостях с подвижных объектов, например с бронетранспортеров (БТР), боевых машин пехоты (БМП) или для поворотных модулей, которые планируется установить на катерах вместе с устройством управления наводкой.
Устройство управления наводкой, размещенное на сухопутном или водном транспорте, подвергается воздействию внезапных толчков на дорожных ухабах, ударам от штормовых волн и вибрациям, возникающим от работы двигателей. Кроме того, при возможном близком разрыве снаряда возникает значительный механический удар. Так, например, удар снаряда о броню (скажем, танка) вызывает очень большие ускорения, сопровождаемые вибрациями, которые передаются на устройство управления наводкой. Поэтому к устройству управления наводной предъявляются высокие требования по стабильности нулевого положения с одновременной большой чувствительностью к малым перемещениям узлов и его деталей для точного сопровождения и высокой вероятности поражения цели при воздействии значительных внешних возмущений. Эти параметры входят в понятие надежности. Повышая стабильность нулевого положения, уменьшается чувствительность и малым перемещениям элементов устройства и, наоборот, увеличивая чувствительность, уменьшается стабильность.
Таким образом, решение этой противоречивой задачи обеспечит высокую степень надежности работы устройства наведения наводкой.
Известна конструкция управляющего механизма [1], состоящая из корпуса с датчиками сигналов, органа управления, подковообразных тубусов, стержней, пружины или регулировочного винта. Датчики сигналов в статическом состоянии проводятся в "нулевое" положение эластичными подковообразными тубусами, закрепленными в корпусе и контактирующими с органом управления. Механизм управляет топливным инжекторным мотором.
Недостаток конструкции заключается в том, что она неработоспособна при воздействии механических нагрузок из-за отсутствия жесткого упора, определяющего точное нулевое положение органа управления, поскольку эластичные подковообразные тубусы при этом меняют геометрические размеры от непосредственного давления органа управления, тем самым хаотически меняются выходные величины сигналов и нарушается управление.
Кроме того, управляющий механизм обладает и низкой надежностью из-за отсутствия стабильности нулевого положения органа управления, поскольку стержни установлены в боковых стенках корпуса по скользящей посадке.
Наиболее близким по технической сущности и достигаемому эффекту является устройство управления наводкой [2] , формирующее управляющий сигнал, устройство управления наводкой содержит элемент, жестко закрепленный на оси, который при вращении измеряет сигнал, в также ограничитель с пластиной, которая поворачивается на оси. Элемент и пластина поджимаются друг к другу пружиной через две втулки. Эти втулки поворотно устанавливаются на оси, поджимаются друг к другу другой пружиной и имеют соответственно выступы, обеспечивающие их взаимное сцепление. Ось поворачивается рукояткой вслед за движением цели. Она шарнирно установлена в точке и возвращается в нейтральное положение стержнем, один конец которого присоединен к элементу. Стержень может скользить в кронштейне, имеет два фланца и подпружинивается двумя пружинами. Пока ограничитель не работает, пластина свободно поворачивается на оси. При нарушении наблюдения цели пластина закрепляется при помощи электромагнита и пружина допускает относительное вращение втулок. Когда пластина свободна при окончании указанного нарушения, она поворачивается пружиной в положение, в котором коррекция осуществляется за счет поворота.
Недостаток устройства состоит в том, что конструкция механизма возврата рукоятки управления в нейтральное (нулевое) положение не может обеспечить высокую стабильность минимального значения выходного электрического сигнала, так как нет жесткой базы (опоры) стрежня в нейтральном положении, которое определяется лишь поджатием пружин, вследствие чего ось находится в колебательном режиме при воздействии вибрационных нагрузок. Конечно, можно увеличить жесткость пружины, но при этом исключается чувствительность к малым перемещениям оси и рукоятки и невозможно управлять наводкой с высокой точностью наведения. А возможность стержня скользить в кронштейне не исключает резонансных явлений в устройстве управления, чем снижается надежность его работы.
Для закрепления пластины используется электромагнит, который неудовлетворительно работает при воздействии на него ударных нагрузок из-за изменения магнитных свойств.
Кроме того, при включении электромагнита возникают паразитные излучения в виде электромагнитных волн, которые создают помехи на управляющий сигнал, особенно в зоне с низким импедансом. Таким образом, наличие дополнительной подсборки - электромагниты и его отрицательное воздействии на ударение снижают надежность работы.
Дополнительные ошибки вносит пружина, которая прижимает элемент к пластине, поскольку работает не только на сжатие, но и на кручение от поворота элемента, а также шарнир, который расположен и закреплен вне тела оси и тем самым увеличивает поле допусков основных отклонений номинальных размеров деталей. Следовательно, известное устройство не представляется возможным использовать в объектах, повергающихся значительным механическим воздействиям с высокой степенью надежности.
Целью изобретения является повышение надежности работы при воздействии внешних механических нагрузок путем повышения точности наведения за счет компенсации неконтролируемого изменения точки отсчета.
Поставленная цель достигается тем, что рукоятка снабжена компенсатором, выполненным в виде подпружиненных изнутри двух полустаканов, один из которых жестко закреплен на рукоятке. При этом в полустаканах выполнены выемки с установленными в них роликами, контактирующими с внутренними стенками скобообразного продольного паза одной из оси. А шарнир рукоятки размещен в продольном пазу, выполненном соосно цилиндрическим концам другой оси. Причем один рычаг каждой пары снабжен пружиной, соединенной с каркасом, и установлен с возможностью взаимодействия с поводком и ограничителем, а другой - с поводком.
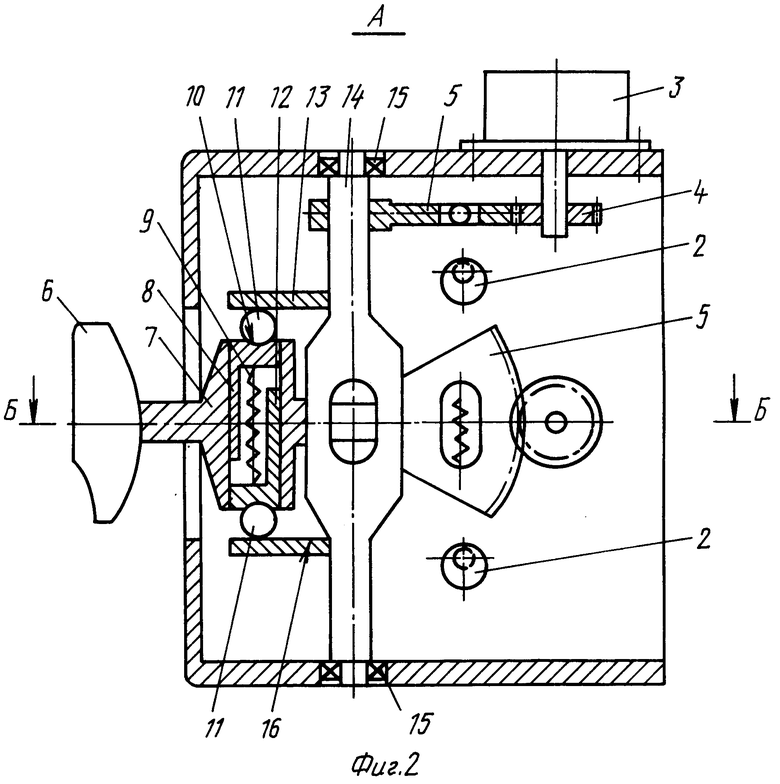
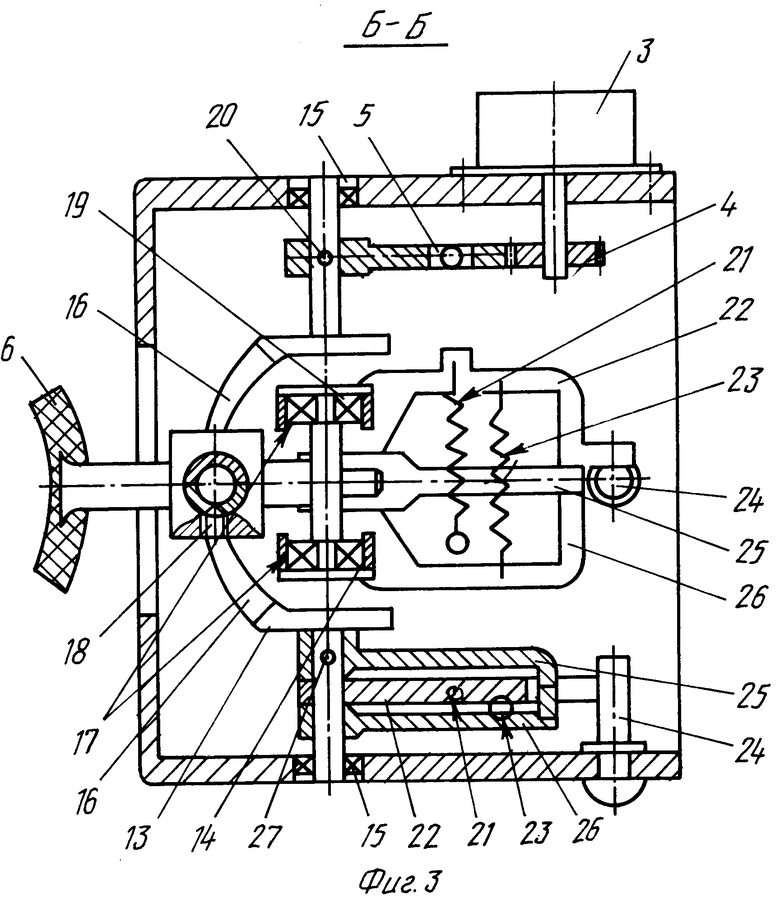
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2, где 1 - каркас, 2 - упор, 3 - потенциометр, 4 - шестерня, 5 - сектор (зубчатый), 6 - кнюппель, 7 - рукоятка, 8 - полустакан, 9 - пружина, 10 - выемка, 11 - ролик, 12 - полустакан, 13 - ось, 14 - ось, 15 - подшипник, 16 - паз (скобообразный), 17 - паз (продольный), 18 - винт, 19 - шарнир, 20 - штифт, 21 - пружина, 22 - рычаг, 23 - пружина, 24 - ограничитель, 25 - поводок, 26 - рычаг, 27 - штифт.
Устройство управления наводкой содержит стальной литой каркас 1 коробчатой формы. На двух наружных прилегающих друг к другу под 90o стенках каркаса 1 установлены и закреплены потенциометры 3, оси которых пропущены внутрь каркаса 1. На осях потенциометров 3 закреплены шестерни 4, входящие в зацепление с разрезными подпружиненными зубчатыми секторами 5. Через дно каркаса 1 пропущена рукоятка 7, один конец которой заканчивается кнюппелем 6, представляющим собой обрезиненное ложе для большого пальца руки, производящего управление наводкой, а другой конец рукоятки 7 заканчивается шарниром 19, который введен в продольный паз 17 в середине оси 14, концы которой через подшипники 15 закреплены на противоположных стенках каркаса 1. Рукоятка 7 снабжена компенсатором, который состоит из двух полустаканов 8, 12, пружины 9 и двух роликов 11. Полустакан 12 закреплен винтом 18 к рукоятке 7, а полустакан 8 имеет возможность перемещаться поперек рукоятки 7 под действием пружины 9, расположенной внутри полустаканов 8 и 12. Полустаканы 8, 12 и пружина 9 находятся внутри рукоятки 7. На наружных торцевых поверхностях полустаканов 8 и 12 выполнены выемки 10. В них установлены ролики 11, которые с помощью пружины 9 поджимаются к стенкам скобообразного паза 16 оси 13. Концы оси 13 также через подшипники 15 закреплены в противоположных стенках каркаса 1. Оси 13 и 14 расположены во взаимно перпендикулярных плоскостях X и Z. На одних их концах внутри каркаса 1 надеты и закреплены штифтами 20 зубчатые сектора 5. Зубчатые сектора 5 расположены между упорами 2, выполненными в виде эксцентричных винтов, которые установлены на каркасе 1. На других двух концах осей 13 и 14 насажены рычаги 22, 26 и поводки 25. Поводки 25 закреплены штифтами 27 на осях 13 и 14. Каждый рычаг 22 поджат пружиной 21 к ограничителю 24. Ограничители 24 и второй конец пружин 21 закреплены на стенках каркаса 1. Между рычагами 22 и 26 размещен поводок 25, который поджат к ним пружиной 23, закрепленной одним концом на рычаге 22, а другим на рычаге 26. Обе пружины 21 и 23 установлены с предварительным натягом, что исключает самопроизвольное перемещение деталей устройства при отсутствии внешнего воздействия на кнюппель 6. Для ограничения углов поворота рукоятки 7 установлены четыре регулировочных упора 2, взаимодействующих с секторами 5.
Устройство работает следующим образом. Пальцем руки воздействуют на кнюппель 6. Кнюппель 6 с рукояткой 7 отклоняется относительно своей точки закрепления в пределах ±28o. Отклонение рукоятки 7 в любую сторону передается одной оси 13 через компенсатор, а другой оси 14 через шарнир 19 с одной степенью свободы.
Ролики 11 компенсатора катятся по внутренним стенкам продольного паза 17 без зазора, поскольку поджаты двумя полустаканами 8 и 12. Один полустакан 12 неподвижно закрепляется винтом 18 с поджимом ролика 11 к внутренней стенке продольного паза 17, а другой полустакан 8 поджимает ролик 17 пружиной 9. Оси 13 и 14 вращаются в подшипниках 15. Это вращение передается зубчатым секторам 5, которые находятся в зацеплении с шестернями 4 потенциометров 3, и поводками 25, каждый из которых взаимодействует с подпружиненными рычагами 22 и 26.
Сектора 5 и поводки 25 закреплены на осях 13, 14 штифтами 20 и 27. Отклонение рукоятки 7 проводит к повороту движка потенциометра 3, с которого выдается электрический сигнал управления.
При отклонении поводка 25 против часовой стрелки одновременно поворачиваются рычаги 22 и 26, стянутые между собой пружиной 23. Пружина 21 растягивается, так как установлена между рычагом 22 и каркасом 1. При отсутствии управления на кнюппель 6 пружина 21 начинает сжиматься и тянет за собой рычаг 22, прижимая его к неподвижному ограничителю 24. Одновременно в исходное положение возвращаются поводок 25 и рычаг 26.
При повороте поводка 25 по часовой стрелке рычаг 29 упирается в ограничитель 24 и остается неподвижным, а рычаг 26 поворачивается и растягивает пружину 23. После снятия управления с кнюппеля 6 пружина 23 поворачивает рычаг 26 в исходное положение, и поводок 25 прижимается к неподвижному рычагу 22.
Предложенное устройство управления наводкой по сравнению с прототипом позволяет:
- повысить надежность работы введением компенсатора, поскольку исключается люфт рукоятки кнюппеля в пазу оси, так как ролики находятся в постоянном контакте со стенками паза за счет сжатия пружин, тем самым даже при малых перемещениях рычага увеличивается реакция потенциометров по выделению сигнала управления. Отсутствие люфта позволило повысить силу трения и обеспечило работу устройства при воздействии динамических сил, возникающих в процессе эксплуатации, так как при этом собственная резонансная частота устройства уходит в область высоких частот, что позволяет использовать его в области низких частот, которые в основном существуют на шоссейных, железных дорогах и судах. Кроме того, отсутствие люфта создает однозначную зону (распределенную нагрузку) как в походном, так и боевом положении, в которой стабильнее работает пружины и точнее возвращают движки потенциометров в нулевое положение с напряжением на них порядка 0±3 мВ при снятии ручного управления и уменьшает несимметричность напряжений в крайних положениях рычагов, что позволяет сохранить эти величины и обеспечить стабильность слежения за целью по курсу и тангажу с более высокой эффективностью;
- повысить точность наведения за счет размещения шарнира в продольном пазу, выполненном соосно цилиндрическим концам одной из осей, поскольку шарнир воздействует непосредственно на ось без промежуточного его крепления и при механических воздействиях значительно снижается амплитуда вибраций осей и за счет последовательного соприкосновения деталей устройства друг с другом. Дополнительно следует отметить, что ликвидация зазоров исключает операцию по припиловке хвостовика поводка либо ограничителя, тем самым значительно упрощается процесс сборки. Кроме того, для получения высокой точности наведения не требуется изготовление 100% прецизионных деталей, чем повышается технологичность изготовления и устройства управления наводкой за счет ликвидации люфтов и использования одной базы для отсчета нулевого положения, а именно один рычаг - ограничитель. На этом основании настройка устройства управления оказалась некритичной к допускам на размеры сопрягаемых деталей, чем повышается надежность его работы;
- улучшить динамические характеристики и придать устойчивое стабильное нулевое положение при внешних механических воздействиях за счет усилий двух пружин, направленных в одну сторону в статическом положении, но при движении поводка в зависимости от его направления движения работает одна пружина и за счет жесткой базовой опоры, роль которой выполняет ограничитель, взаимодействующий с одним подпружиненным рычагом, поскольку управляющий орган - поводок плотно зажат в исходном состоянии между двумя подпружиненными рычагами.
Отдельно следует сказать, что оценку функционирования устройства управления наводкой - в части высокой надежности необходимо рассматривать не только по выходным параметрам, но и в контексте воздействия на управляемые объекты по конечному требуемому результату - высокой вероятности попадания в цель. Вероятность попадания в цель как показатель надежности включает множество условий, такие как точностные характеристики, состоящие из: 1) статических параметров нормального закона распределения координат отклонений по осям X, Z устройства управления наводкой относительно точки прицеливания mт; 2) ошибок сопротивления цели оператором mс; 3) конструктивного выполнения устройства управления наводкой mю.
И количественные показатели надежности, состоящие из вероятности безотказной работы Pа
где
mа - счетное количество отказов;
nа - зачетное количество наводок.
Для этого по данному предложению изготовлены опытные образцы и проведены испытания устройства управления наводкой как на объектах в полевых условиях, так и на работающем вибростенде, имитирующем удары и вибрационные нагрузки с физическим моделированием пусков на различные дальности.
В ходе проверок определялось математическое ожидание ошибок слежения в i-наводке mx и mz и среднеквадратическое отклонение σт на определенных дальностях D.
mx = mтx + mсюx (в плоскости горизонтального наведения);
mz = mтz + mсюz (в плоскости вертикального наведения).

n - число анализируемых наводок.
Частичные выписки результатов проверок и математической обработки измерений координат отклонений по оси X приведены в таблице.
Как видно из результатов испытаний, точностные и количественные показатели надежности предлагаемого технического решения очень высоки.
Таким образом, анализ предлагаемого технического решения показывает, что устройство обладает эффективной инерционностью к внешним механическим нагрузкам и в то же время имеет повышенную надежность и точность наведения.
Источники информации
1. Патент США N 3655148, кл. 244/3.22, кл. F 41 g 7/00, опубл. 11 апреля 1972 г.
2. Заявка Великобритании N 1400037, кл. F 41 G 3/00, НКИ ГЗС, опубл. 16 июля 1975 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВОДКОЙ | 1999 |
|
RU2165581C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЦЕНТРИРОВАНИЯ ПРИЦЕЛЬНОГО УСТРОЙСТВА И ПОВОРОТНОГО ЭЛЕМЕНТА | 2002 |
|
RU2234040C2 |
| КОРПУС ПУЛЬТА УПРАВЛЕНИЯ | 2002 |
|
RU2235371C2 |
| ТРЕНОЖНЫЙ СТАНОК АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2002 |
|
RU2206039C1 |
| СТРЕЛКОВОЕ ОРУЖИЕ СО СДВОЕННЫМ ПРИЦЕЛЬНЫМ УСТРОЙСТВОМ | 1995 |
|
RU2111436C1 |
| ПРИВОД ВРАЩАЮЩЕГОСЯ КОНВЕЙЕРА АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 1999 |
|
RU2172457C2 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| СКЛАДЫВАЮЩЕЕСЯ СТРЕЛКОВОЕ ОРУЖИЕ | 1998 |
|
RU2148767C1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| СТРЕЛКОВОЕ МНОГОЗАРЯДНОЕ ОРУЖИЕ | 1993 |
|
RU2086887C1 |

Изобретение относится к системам управления оружием и может быть использовано для корректировки траектории летящей ракеты в двух координатах (в вертикальной и горизонтальной плоскостях), управления радиоэлектронной аппаратурой, сервомеханизмами, гидравлическими двигателями, следящими системами или поворотными модулями на различных подвижных объектах. Задача изобретения - повышение надежности работы устройства при воздействии внешних механических нагрузок. Это достигается путем повышения точности наведения за счет компенсации неконтролируемого изменения точки отсчета. Конструктивное устройство управления наводкой содержит каркас с двумя потенциометрами, рукоятку с шарниром ручного управления, ограничители, две пары подпружиненных между собой рычагов, оси скобообразной формы с продольными пазами и с цилиндрическими концами, на каждом из которых с одной стороны установлены зубчатые сектора, кинематически связанные с осями потенциометров, а на других жестко закреплены поводки. Рукоятка данного устройства снабжена компенсатором, выполненным в виде подпружиненных изнутри двух полустаканов, один из которых жестко закреплен на рукоятке, при этом в полустаканах выполнены выемки с установленными в них роликами, контактирующими с внутренними стенками скобообразного продольного паза одной из оси, а шарнир рукоятки размещен в продольном пазу, выполненном соосно цилиндрическим концам другой оси, причем один рычаг каждой пары снабжен пружиной, соединенной с каркасом, и установлен с возможностью взаимодействия с поводком и ограничителем, а другой - с поводком. 1 табл., 3 ил.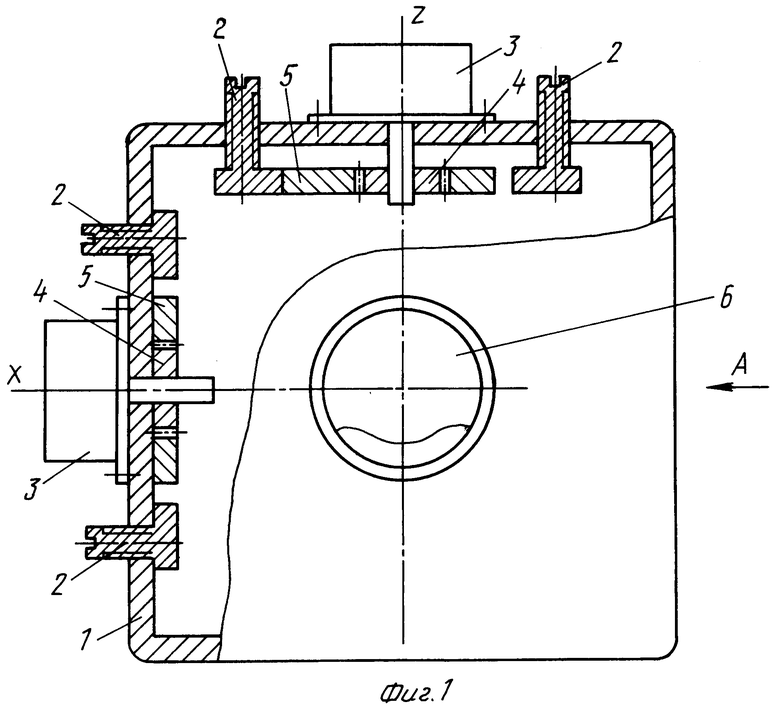
Устройство управления наводкой, содержащее каркас с двумя потенциометрами, расположенными в двух взаимно перпендикулярных плоскостях, рукоятку с шарниром ручного управления, ограничители, две пары подпружиненных между собой рычагов, оси скобообразной формы с продольными пазами и цилиндрическими концами, на каждом из которых с одной стороны установлены зубчатые сектора, кинематически связанные с осями потенциометров, а на других жестко закреплены поводки, отличающееся тем, что в нем рукоятка снабжена компенсатором, выполненным в виде подпружиненных изнутри двух полустаканов, один из которых жестко закреплен на рукоятке, при этом в полустаканах выполнены выемки с установленными в них роликами, контактирующими с внутренними стенками скобообразного продольного паза одной из оси, а шарнир рукоятки размещен в продольном пазу, выполненном соосно с цилиндрическими концами другой оси, причем один рычаг каждой пары снабжен пружиной, соединенной с каркасом, и установлен с возможностью взаимодействия с поводком и ограничителем, а другой - с поводком.
| GB, 1400037, F 41 G 3/00, 1975 |
