Предлагаемое изобретение относится к способам регулирования центрирования прицельных устройств и поворотных модулей в военной и других областях хозяйственной деятельности.
Наиболее перспективное направление использования изобретения в полуавтоматических следящих системах противотанковых ракетных комплексов.
Требования к динамике таких систем определяются условиями наилучшей составляющей выходного управляемого сигнала, поскольку по мере приближения ракеты к цели расстояние ее от оператора увеличивается, а вместе с этим увеличивается и вероятность промаха. Поэтому эффективная регулировка центра прицельной точки, особенно для поражения малогабаритных целей на больших расстояниях и при индивидуальном движении цели, является актуальной задачей.
Известен способ и устройство для выверки приборов управления огнем орудий [l]. Устройство для определения и коррекции ошибок, возникающих при выверке приборов управления огнем орудий, содержит датчик визирования цели, установленный на орудии с сервоуправляемой платформой. Линия визирования датчика совмещается с линией стрельбы орудия. Орудие вместе с датчиком направляется на цель при помощи следящего устройства. Разность между направлением орудия на цель и положением линии визирования датчика орудия в этом датчике используется для коррекции управляющих сигналов, вырабатываемых при стрельбе.
Недостаток способа и устройства его реализации состоит в том, что использовать в переносных и возимых пусковых установках не представляется возможным, так как орудие с датчиком разнесены в пространстве со следящим устройством.
Наиболее близким по технической сущности и достигаемому эффекту является способ регулирования центрирования прицельного устройства и поворотного элемента [2]. Последний поворачивается в одной плоскости вокруг первой поворотной оси. По меньшей мере часть устройства поворачивается относительно второй поворотной оси. На элементе установлена аппаратура, которая формирует параллельный пучок излучения, освещающий непосредственно или косвенно поворотную часть устройства, и обеспечивает благодаря этому формирование изображения точки в том конце прицельного устройства, в котором воспроизводится наблюдаемое изображение. Поворотный элемент подвижен и может занимать различные угловые положения относительно первой поворотной оси. Если во время этих перемещений изображение точки смещается на величину, большую определенной допустимой величины, то регулируется соединение между поворотным элементом и прицельным устройством. Аппаратура содержит раму, которая оборудована приспособлениями для крепления аппаратуры к поворотному элементу.
Недостаток способа заключается в том, что аппаратура, формирующая пучок излучения, установлена на поворотном элементе и тем самым требуется дополнительно учитывать влияние разных баз между прицельным устройством и поворотным элементом, увеличивается позиционная ошибка следящей системы. Использование данного способа для управления ракетой при наведении ее на цель на относительно небольшие расстояния ручным управлением оператором при визуальном наблюдении за целью в прицел требует регулирования центра точки при смещении ее на величину меньше допустимой в течение времени полета ракеты до цеди. В процессе слежения за целью оператор совершает ошибочные отклонения, имеющие случайный характер, и в линии управления наряду с полезным сигналом будут поступать сигналы помехи, которые увеличиваются от наличия зазоров, упругих деформаций в прицельном устройстве и опорно-поворотном элементе, т.е. действуют несколько нелинейностей, приводящих к автоколебаниям, что затрудняет использование способа, например, в противотанковых управляемых комплексах, особенно при поражении малогабаритных целей. Анализ параметрических помех показывает, что необходимо введение компенсирующих связей в прицельное устройство и поворотный элемент для уменьшения ошибок в управляющем сигнале, чтобы повысить эффективность регулирования.
Задачей предлагаемого изобретения является расширение области использования и повышение эффективности регулирования центрирования для поражения малогабаритных целей.
Поставленная задача достигается тем, что в способе регулирования центрирования прицельного устройства и поворотного элемента, например, в следящих системах управления ракетой, включающем закрепление платформы прицельного устройства с органами подстройки неподвижно на поворотном элементе, размещение поворотного элемента на несущей раме, установку аппаратуры с возможностью формирования параллельного пучка излучения лазером из прицельного устройства и воспроизводящей изображение световой точки из подсветки через призмы и системы линз в центре сетки окуляра прицельного устройства с совмещением ее с маркировочной целью по визирной оси, при этом подвижная часть прицельного устройства может занимать различные угловые положения в вертикальной плоскости, а в горизонтальной плоскости относительно поворотного элемента в зависимости от сигнала с каскада привода горизонтального наведения прицельного устройства и привода поворотного элемента.
Новым является то, что аппаратуру с введенными в нее двумя делителями в виде двух пар последовательно соединенных постоянных резисторов, источником постоянного тока и прибором контроля напряжений устанавливают на платформе прицельного устройства, а после совмещения световой точки с центром сетки окуляра и маркировочной целью выполняют отметку на поворотном элементе и раме.
После чего выключают подсветку с одновременным удалением призмы с визирной оси и вводят в поворотный элемент потенциометрический задатчик положения с карданным подвесом и двумя переменными резисторами, размещенными во взаимно-перпендикулярных плоскостях для горизонтального и вертикального наведений на каркасе коробчатой формы, который жестко закрепляют на поворотном элементе. При этом оси резисторов кинематически связаны с карданным подвесом. Затем осуществляют электрическое соединение дополнительного отвода переменных резисторов между собой и с общей точкой в аппаратуре.
Подключают выходы делителей к неподвижным выводам резистора вертикального наведения, средние плечи делителей - к неподвижным выводам резистора горизонтального наведения, подвижный вывод резисторов - к входным каскадам приводов горизонтального и вертикального наведений подвижной части прицельного устройства и к прибору контроля напряжений, выходной каскад привода вертикального наведения - к прибору контроля напряжений, выходной каскад привода горизонтального наведения подвижной части прицельного устройства и входной каскад привода поворотного элемента - к аппаратуре, выходной каскад привода поворотного элемента - к прибору контроля напряжений, а входы делителей - к источнику постоянного тока, в котором выставляют фиксированное напряжение.
После чего наклоняют карданный подвес из нейтрального положения влево и путем движения поворотного элемента совмещают центр сетки с отметкой и ординатой маркировочной цели. Определяют величину разности напряжения между подвижным выводом резистора горизонтального наведения и выходным каскадом привода поворотного элемента. Затем наклоняют карданный подвес из нейтрального положения вправо и путем движения поворотного элемента снова совмещают центр сетки с отметкой и ординатой маркировочной цели. Определяют величину разности напряжения между подвижным выводом резистора горизонтального наведения и выходным каскадом привода поворотного элемента. Поворачивают ось резистора горизонтального наведения в зубчатом зацеплении потенциометрического задатчика, выравнивают напряжения в выходном каскаде привода поворотного элемента от левого и правого наклонов карданного подвеса и, не меняя нейтрального положения карданного подвеса, поворачивают корпус резистора горизонтального наведения до совмещения центра сетки с отметкой и ординатой маркировочной цели и жестко закрепляют корпус резистора на каркасе задатчика. После чего наклоняют карданный подвес из нейтрального положения вверх, определяют величину разности напряжения между подвижным выводом резистора вертикального наведения и выходным каскадом привода вертикального наведения. Затем наклоняют карданный подвес из нейтрального положения вниз, снова определяют величину разности напряжения между подвижным выводом резистора вертикального наведения и выходным каскадом привода вертикального наведения.
Поворачивают ось резистора вертикального наведения в зубчатом зацеплении потенциометрического задатчика, выравнивают напряжения в выходном каскаде привода от верхнего и нижнего наклонов карданного подвеса и, не меняя нейтрального положения карданного подвеса, поворачивают корпус резистора вертикального наведения до совмещения центра сетки с центром маркировочной цели и жестко закрепляют корпус резистора на каркасе задатчика. Использование предлагаемого способа позволяет создать противотанковые ракетные комплексы с техническими характеристиками, способные поражать малогабаритные подвижные цели, так и неподвижные цели, например танки, самоходные артиллерийские установки, опорные пункты, доты, ячейки пусковых установок, гранатометчиков, снайперов на больших расстояниях и причем при движении самого комплекса, так и на малых расстояниях при движении цели с непредсказуемым характером.
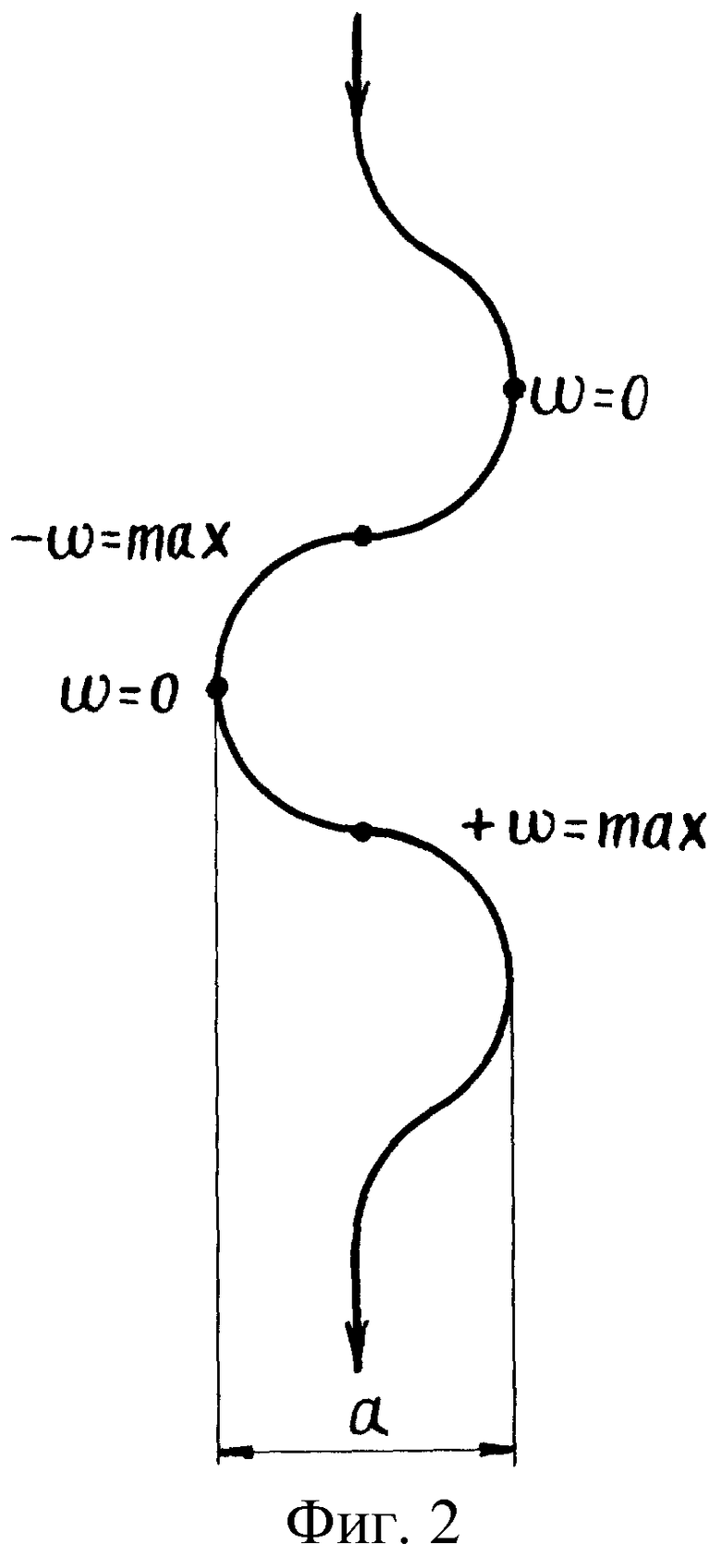
На фиг.1, 2, 3, 4 представлены схемы регулирования центрирования прицельного устройства и поворотного элемента, где 1 - поворотный элемент, 2 - прицельное устройство, 3 - орган подстройки, 4 - платформа, 5 - аппаратура, 6 - прибор контроля напряжений, 7 - делитель, 8 - источник постоянного тока, 9 - подсветка, 10 - визирная ось, 11 - оборачивающая призма, 12 - призма, 13 - система линз, 14 - регулируемая призма, 15 - регулируемая призма, 16 - прямоугольная призма, 17 - отверстие, 18 - система линз, 19 - зеркало, 20 - окуляр, 21 - световая точка, 22 - маркировочная цель, 23 - усилитель, 24 - двигатель с редуктором, 25 - тахогенератор, 26 - центр сетки, 27 - ордината маркировочной цели, 28 - отметка, 29 – рама, 30 - потенциометрический задатчик положения, 31 - каркас, 32 - резистор горизонтального наведения, 33 - резистор вертикального наведения, 34 - ось резистора горизонтального наведения, 35 - ось резистора вертикального наведения, 36 - шестерня, 37 - шестерня, 38 - зубчатый сектор, 39 - зубчатый сектор, 40 - упор, 41 - штанга, 42 - рукоятка, 43 - кнюппель, 44 – ракета, 45 - шарнир, 46 - продольный паз, 47 – подшипник, 48 - привод горизонтального наведения, 49 - привод вертикального наведения, 50 - дополнительный отвод резистора, 51 - общая точка, 52 - подвижный вывод резистора горизонтального наведения, 53 - подвижный вывод резистора вертикального наведения, 54 - корпус резистора, 55 - центр маркировочной цели, 56 - луч лазера.
Способ регулирования центрирования прицельного устройства и поворотного элемента осуществляется следующим образом. Закрепляют неподвижно на поворотном элементе 1 прицельное устройство 2 с органами подстройки 3 за ее платформу 4 (фиг.1). Аппаратуру 5 с прибором контроля напряжений 6, двумя делителями 7 в виде двух пар последовательно соединенных постоянных резисторов R1, R2, R3, R4, источником постоянного тока 8 и подсветкой 9 устанавливают на платформе 4 прицельного устройства 2. Включают в аппаратуре 5 подсветку 9 при этом одновременно на линию визирной оси 10 автоматически вводится оборачивающая призма 11. Свет падает на призму 12, которая направляет его через систему линз 13 на две, регулируемые органами подстройки 3, призмы 14 и 15, а с них на прямоугольную призму 16 с отверстием 17, в систему линз 18 и на зеркало 19. С зеркала 19 свет падает на оборачивающую призму 11, затем снова на зеркало 19, систему линз 18 и от призмы 16 в окуляр 20 в виде световой точки 21. Устанавливают перед прицельным устройством 2 маркировочную цель 22. Поворачивают поворотный элемент 1 его приводом, состоящим из усилителя 23, двигателя с редуктором 24 и тахогенератором 25, в горизонтальной плоскости и совместно с органами подстройки 3 совмещает центр сетки 26 в окуляре 20 прицельного устройства 2 с ординатой 27 маркировочной цели 22 на визирной оси 10 и выполняют отметку 28 на поворотном элементе 1 и несущей раме 29. Несущая рама 29 может быть корпусом бронетранспортера, машины или опорной деталью пусковой установки, на которых размещается поворотный элемент 1.
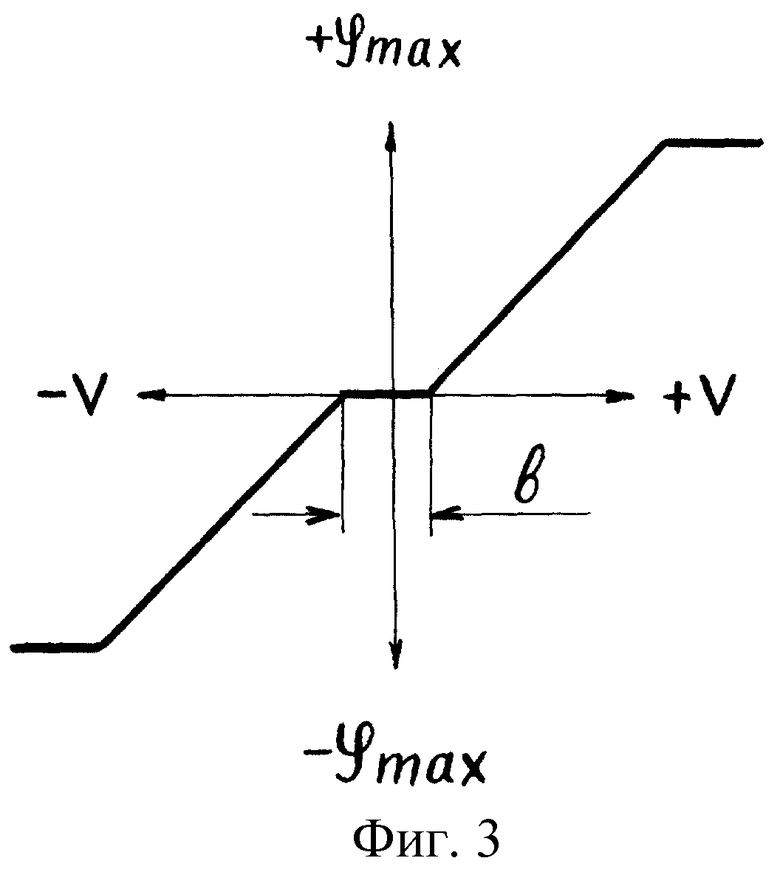
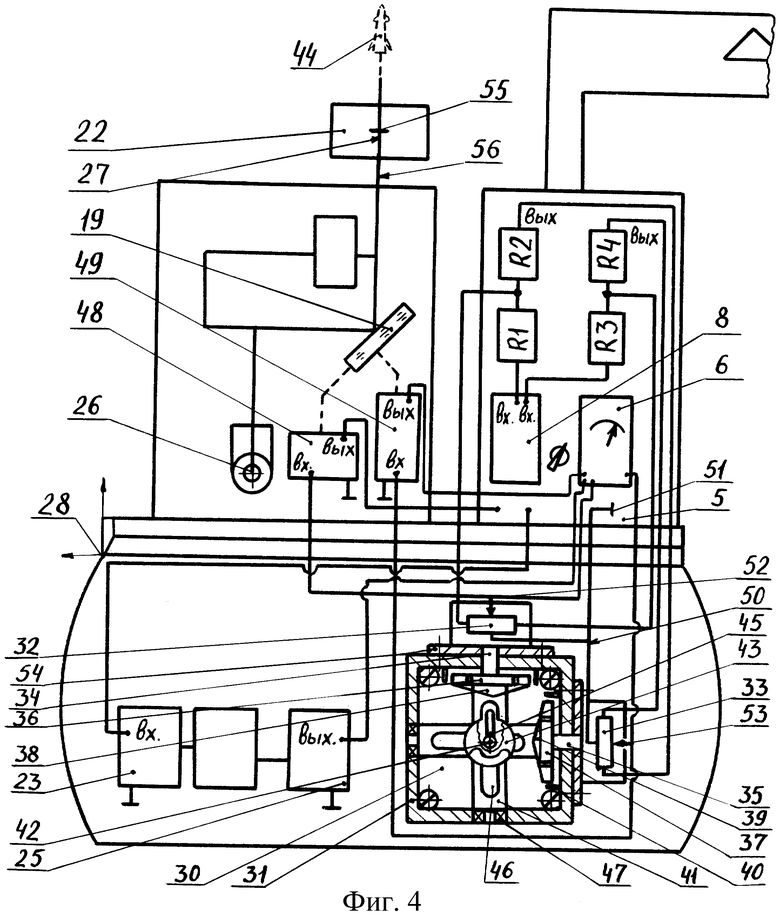
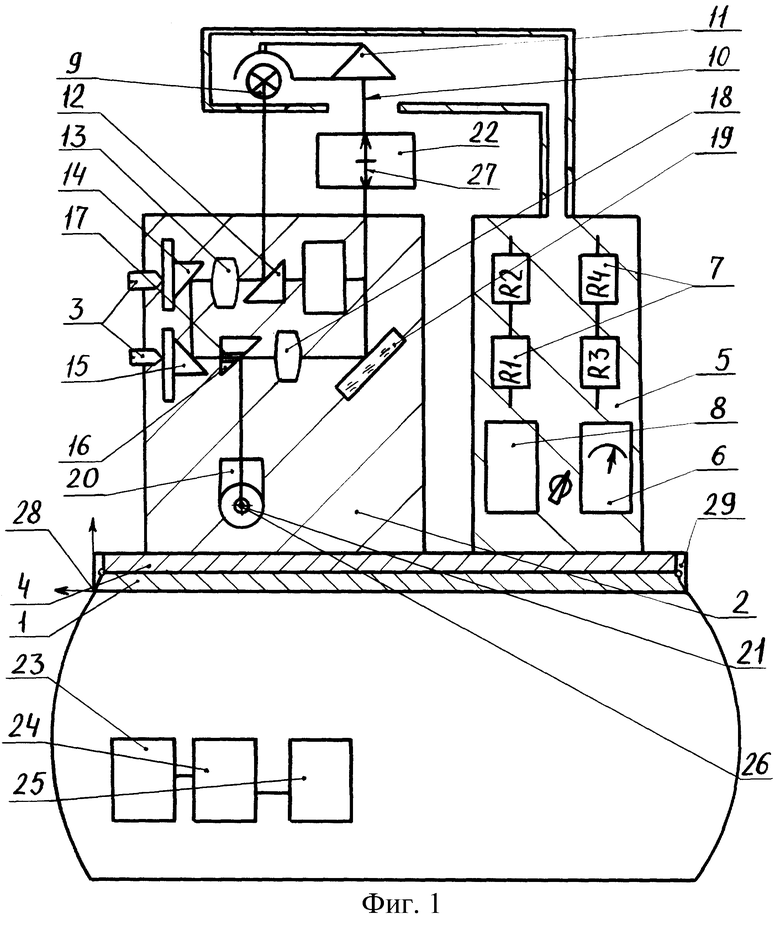
Этими операциями заканчивается предварительное регулирование центрирования прицельного устройства 2 и поворотного элемента 4. Однако при движении цели противника, например легкого танка, с большой скоростью и змейкой в направлении обороняющихся (фиг.2), когда угловая скорость танка "ω" меняется от минимума до максимума с переменным знаком на узкой ширине фронта "а", то для поражения цели необходимо, чтобы нечувствительная зона управления "в" (фиг.3), которая является функцией разности напряжений на выходных каскадах приводов 25, 48, 49 и углов поворота ракеты 44 (фиг.4), обеспечивала сохранение ракеты 44 в луче лазера 56 (фиг.4) в зоне "а" (фиг.2).
Выполняется это условие введением потенциометрического задатчика положения 30. Потенциометрический задатчик положения представляет собой стальной литой каркас 31 коробчатой формы. На двух наружных прилегающих друг к другу под углом 90° стенках каркаса 31 установлены переменные резисторы СП4-8-1±1% 3,3 кОм ±10% OЖО.468.161 ТУ. Один резистор 32 обеспечивает работу в горизонтальной плоскости, а другой резистор 33 в вертикальной. Оси 34, 35 резисторов 32, 33 пропущены внутрь каркаса 31. На осях 34, 35 резисторов 32, 33 закреплены шестерни 36, 37, входящие в зацепление с разрезными подпружиненными зубчатыми секторами 38, 39, расположенными между упорами 40 на штангах 41. Через дно каркаса 31 пропущена рукоятка 42, один конец которой заканчивается кнюппелем 43, представляющим собой обрезиненное ложе для большого пальца руки оператора, производящего регулирование центрирования и управления наводкой ракеты 44, а другой конец рукоятки 42 заканчивается шарниром 45, введенным в продольные пазы 46 двух штанг 41, концы которых через подшипники 47 закреплены на противоположных стенках каркаса 31. Рукоятка 42, кнюппель 43, шарнир 45, штанги 41 с пазами 46 и подшипниками 47 - это карданный подвес.
Потенциометрический задатчик положения 30 вводят внутрь поворотного элемента 1 и жестко закрепляют на нем за каркас 31.
Затем выполняют электрическую связь переменных резисторов 32, 33 с резисторами R1-R4, с прибором контроля напряжений 6 (вольтметром), с приводами горизонтального наведения 48 и вертикального наведения 49 подвижной части прицельного устройства 2, с приводом горизонтального наведения поворотного элемента 23, 24, 25 (фиг.1) с источником постоянного тока 8. Конкретно осуществляют электрическое соединение дополнительного отвода 50, переменных резисторов 32, 33 между собой и с общей точкой 51 (шина заземления) в аппаратуре 5. Дополнительный отвод 50 в резисторах СП4 неподвижный, он разделяет сопротивление резистора на равные части. Подключают выходы резисторов R2, R4 к неподвижным выводам резистора 33 вертикального наведения, средние плечи резисторов R1, R2, R3, R4 к неподвижным выводам резистора 32 горизонтального наведения, подвижный вывод 52, 53 резисторов 32, 33 горизонтального и вертикального наведений к входным каскадам приводов 48, 49 подвижной части прицельного устройства 2 соответственно горизонтального и вертикального направлений и к прибору контроля напряжений 6, выходной каскад привода вертикального наведения 49 к прибору контроля напряжений 6, выходной каскад привода горизонтального наведения 48 подвижной части прицельного устройства 2 и входной каскад 23 привода поворотного элемента 1 к аппаратуре 5, выходной каскад 25 привода поворотного элемента 1 к прибору контроля напряжений 6.
А входы резисторов R1, R3 к источнику постоянного тока 8, в котором выставляют фиксированное напряжение порядка 40 вольт. Как только подается напряжение, приводы 48, 49 отрабатывают рассогласование в системе, которое появляется из-за люфтов в механизмах и как следствие ненулевого значения выходного электрического сигнала с подвижных выводов 52, 53 переменных резисторов 32, 33 потенциометричеcкого задатчика положения 30.
Затем большим пальцем руки через кнюппель 43 наклоняют карданный подвес, из свободного состояния влево при этом поворачивается зубчатый сектор 38, который вращает шестерню 36 и ось 34 резистора 32 горизонтального наведения. Ось 34 резистора 32 связана с подвижным его выводом 52. Электрический сигнал с подвижного вывода 52 резистора 32 поступает на входной каскад привода горизонтального наведения 48 подвижной части прицельного устройства 2, который представляет собой усилитель, а выходной сигнал с этого привода 48 управляет поворотом зеркала 19 и одновременно поступает в аппаратуру 5, где преобразуется в сигнал управления, поступающий на входной каскад 23 привода поворотного элемента 1. Наклон карданного подвеса выполняют до совмещения центра сетки 26 с отметкой 28 и ординатой 27 маркировочной цели 22 и в этом положении определяют напряжение И1 между подвижным выводом 52 резистора 32 горизонтального наведения и общей точкой 51 и напряжение И2 между выходным каскадом 25 привода поворотного элемента 1 и общей точкой 51.
Вычисляют величину разности напряжения Илев между подвижным выводом 52 резистора 32 горизонтального наведения и выходным каскадом 25 привода поворотного элемента 1, который представляет собой тахогенератор Илев=И1-И2. Затем наклоняют карданный подвес вправо и определяют величину разности напряжения Иправ, повторив действия аналогично определения разности напряжения Илев. После чего шестерню 36 резистора 32 горизонтального наведения выводят из зацепления с зубчатым сектором 38 и поворачивают ее с осью 34 резистора 32, достигая выравнивания напряжения Илев=Иправ. Затем шестерню 36 снова вводят в зацепление с зубчатым сектором 38, при этом фиксируют в нейтральном положении рукоятку 42 карданного подвеса и поворачивают корпус 54 резистора 32 горизонтального наведения вправо или влево до совмещения центра сетки 26 с отметкой 28 и ординатой 27 маркировочной цели 22 и в этом положении корпус 54 резистора 32 закрепляют неподвижно на каркасе 31 потенциометрического задатчика положения 30. Этим заканчивается регулирование центрирования прицельного устройства 2 и поворотного элемента 1 в горизонтальной плоскости.
Аналогично отклоняют карданный подвес из нейтрального положения вверх. Замеряют напряжение И3 между подвижным выводом 53 резистора 33 вертикального наведения и общей точкой 51 и напряжение И4 между выходным каскадом привода вертикального наведения 49 и общей точкой 51.
Определяют величину разности напряжения Иверх между подвижным выводом 53 резистора 33 вертикального наведения и выходным каскадом привода вертикального наведения 49 Иверх=И3-И4.
Такими же действиями определяют величину разности напряжения Иниз при отклонении карданного подвеса вниз. Затем повторяют манипуляции с резистором 33 вертикального наведения, как с резистором 32 горизонтального наведения с совмещением центра сетки 26 с отметкой 28 и центром 55 маркировочной цели 22. Предлагаемый способ регулирования центрирования прицельного устройства и поворотного элемента по сравнению с прототипом позволяет расширить область использования за счет совмещения аппаратуры с прицельным устройством и введения потенциометрического задатчика положения в полость поворотного элемента, что позволяет их компактно разместить в противотанковых комплексах, например на боевых машинах легкой весовой категории типа БМП, БТР, на малых кораблях, в том числе на катерах береговой охраны и использовать в переносных пусковых установках, а также эффективно проводить операции по регулированию из-за коротких связей между аппаратурой, прицельным устройством и потенциометрическим задатчиком положения.
Короткие электрические связи повышают помехоустойчивость системы, которая является важнейшей характеристикой эффективности управления, особенно, с ручной коррекцией траектории ракеты в режиме переброски с момента выстрела до момента поражения цели на максимальной дальности и на минимальной дальности при характерном движении цели. Кроме того, за счет выполнения регулирования в два этапа, до установки потенциометрического задатчика положения и после установки задатчика положения обеспечивается центрирование прицельного устройства и поворотного элемента, что позволяет точно управлять ракетой на всей дистанции ее полета. Как показывают замеры напряжения на первом этапе, на выходных каскадах имеется ±500 милливольт при отсутствии воздействия на кнюппель, что великовато для поражения малогабаритных целей. А на втором этапе, за счет компенсирующей цепи, которая формируется двумя переменными (реверсивными) резисторами удалось получить напряжение порядка 0±1 милливольт, что позволяет при любых отклонениях кнюппеля, в зависимости от направления движения цели и ее размеров сохранить ракету в момент пуска и управлять ее в узком информационном пучке излучения. Предлагаемая взаимная связь всех узлов уменьшает зону нечувствительности системы, что не позволяет ракете при ее флуктуациях в полете уходить из зоны пучка излучения, а также обеспечивает при различных положениях кнюппеля одинаковую крутизну управления, к которой оператор привыкает, поскольку крутизна определяется отношением угловой скорости поворота прицельного устройства к угловому отклонению осей резисторов.
Дополнительно следует отметить, что особенности энергетических и механических характеристик следящих систем для пуска ракет, обладающих сложными законами движения и режимами работы как на минимальных и максимальных дальностях, показывают, что предлагаемый способ регулирования центрирования позволяет работать прицельному устройству и поворотному элементу в динамике так же, как в стационарных условиях, потому что оптические оси лазера и центра сетки окуляра механически жестко связаны. Кроме того, напряжение на выходных каскадах порядка 0±1 милливольт при отсутствии воздействия на кнюппель (мертвая зона) позволяет использовать предлагаемый способ на объектах с мягкой амортизацией ходовой части, например на джипах. Таким образом, предлагаемый способ позволяет повысить эффективность регулирования центрирования прицельного устройства и поворотного элемента для поражения малогабаритных целей и расширить область использования.
Источники информации
1. Международная заявка РСТ (WO) № 88/08952, МКИ 4 F 41 G 3/32, 5/26. Публикация 17.11.88 г., № 25, аналог.
2. Заявка ЕПВ (ЕР) № 0173406, F 41 G 3/32. Публикация 05.03.86 г., № 10, прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ВОЗДУШНОЙ ЦЕЛИ ПО ЕЕ УСТАНОВЛЕННОЙ СКОРОСТИ | 2013 |
|
RU2558407C2 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| Устройство для профессионального отбора и обучения операторов систем слежения | 2016 |
|
RU2638410C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| Тренажер для профессиональной подготовки военных специалистов носимых и выносных противотанковых ракетных комплексов (варианты) | 2015 |
|
RU2660796C1 |
| Способ контроля параметров лазерного канала управления прицельных комплексов и устройство диагностики для его осуществления | 2023 |
|
RU2824220C1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ВЕРТОЛЕТА | 1995 |
|
RU2087831C1 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
Изобретение относится к прицельным устройствам следящих систем, в частности, к способам их регулирования. Сущность изобретения заключается в том, что закрепляют платформу прицельного устройства с органами подстройки на поворотном элементе, размещают поворотный элемент на несущей раме и устанавливают аппаратуру. Аппаратуру снабжают двумя делителями в виде двух пар последовательно соединенных постоянных резисторов, источником постоянного тока и прибором контроля напряжений и устанавливают на платформе прицельного устройства. После совмещения световой точки с центром сетки окуляра и маркировочной целью выполняют отметку на поворотном элементе и раме. Вводят в поворотный элемент потенциометрический задатчик положения с карданным подвесом и двумя переменными резисторами, размещенными во взаимно перпендикулярных плоскостях для горизонтального и вертикального наведений. Соединяют элементы электрической схемы определенным образом, после чего поочередно наклоняют карданный подвес из нейтрального положения влево, вправо, вверх и вниз. После каждой такой операции путем движения поворотного элемента совмещают центр сетки с отметкой и ординатой маркировочной цели, определяют величину разности напряжения между подвижным выводом резистора горизонтального наведения и выходным каскадом привода поворотного элемента. После выполнения всех необходимых операций жестко закрепляют корпус резистора на каркасе задатчика. Реализация изобретения позволяет повысить эффективность регулирования центрирования устройства и расширение области его применения. 4 ил.
Способ регулирования центрирования прицельного устройства и поворотного элемента, например, в следящих системах управления ракетой, включающий закрепление платформы прицельного устройства с органами подстройки неподвижно на поворотном элементе, размещение поворотного элемента на несущей раме, установку аппаратуры с возможностью формирования параллельного пучка излучения лазером из прицельного устройства и воспроизводящей изображение световой точки из подсветки через призмы и системы линз в центре сетки окуляра прицельного устройства с совмещением ее с маркировочной целью на визирной оси, при этом подвижная часть прицельного устройства может занимать различные угловые положения в вертикальной плоскости, а в горизонтальной плоскости относительно поворотного элемента в зависимости от сигнала с каскада привода горизонтального наведения прицельного устройства и привода поворотного элемента, отличающийся тем, что аппаратуру с введенными в нее двумя делителями в виде двух пар последовательно соединенных постоянных резисторов, источником постоянного тока и прибором контроля напряжений, устанавливают на платформе прицельного устройства, а после совмещения световой точки с центром сетки окуляра и маркировочной целью выполняют отметку на поворотном элементе и раме, после чего выключают подсветку с одновременным удалением призмы с визирной оси и вводят в поворотный элемент потенциометрический задатчик положения с карданным подвесом и двумя переменными резисторами, размещенными во взаимно перпендикулярных плоскостях для горизонтального и вертикального наведений на каркасе коробчатой формы, который жестко закрепляют на поворотном элементе, при этом оси резисторов кинематически связаны с карданным подвесом, затем осуществляют электрическое соединение дополнительного отвода переменных резисторов между собой и с общей точкой в аппаратуре, подключают выходы делителей к неподвижным выводам резистора вертикального наведения, средние плечи делителей - к неподвижным выводам резистора горизонтального наведения, подвижный вывод резисторов - к входным каскадам приводов горизонтального и вертикального наведении подвижной части прицельного устройства и к прибору контроля напряжений, выходной каскад привода вертикального наведения - к прибору контроля напряжений, выходной каскад привода горизонтального наведения подвижной части прицельного устройства и входной каскад привода поворотного элемента - к аппаратуре, выходной каскад привода поворотного элемента - к прибору контроля напряжений, а выходы делителей - к источнику постоянного тока, в котором выставляют фиксированное напряжение, после чего наклоняют карданный подвес из нейтрального положения влево и путем движения поворотного элемента совмещают центр сетки с отметкой и ординатой маркировочной цели, определяют величину разности напряжения между подвижным выводом резистора горизонтального наведения и выходным каскадом привода поворотного элемента, затем наклоняют карданный подвес из нейтрального положения вправо и путем движения поворотного элемента снова совмещают центр сетки с отметкой и ординатой маркировочной цели, определяют величину разности напряжения между подвижным выводом резистора горизонтального наведения и выходным каскадом привода поворотного элемента, поворачивают ось резистора горизонтального наведения в зубчатом зацеплении потенциометрического задатчика, выравнивают напряжения в выходном каскаде привода поворотного элемента от левого и правого наклонов карданного подвеса и, не меняя нейтрального положения карданного подвеса, поворачивают корпус резистора горизонтального наведения до совмещения центра сетки с отметкой и ординатой маркировочной цели и жестко закрепляют корпус резистора на каркасе задатчика, после чего наклоняют карданный подвес из нейтрального положения вверх, определяют величину разности напряжения между подвижным выводом резистора вертикального наведения и выходным каскадом привода вертикального наведения, затем наклоняют карданный подвес из нейтрального положения вниз, снова определяют величину разности напряжения между подвижным выводом резистора вертикального наведения и выходным каскадом привода вертикального наведения, поворачивают ось резистора вертикального наведения в зубчатом зацеплении потенциометрического задатчика, выравнивают напряжения в выходном каскаде привода от верхнего и нижнего наклонов карданного подвеса и, не меняя нейтрального положения карданного подвеса, поворачивают корпус резистора вертикального наведения до совмещения центра сетки с центром маркировочной цели и жестко закрепляют корпус резистора на каркасе задатчика.
| Способ получения анионита конденсацией эпихлоргидрина с алифатическими аминами | 1963 |
|
SU173406A1 |
| НОЧНОЙ ПРИЦЕЛ | 1992 |
|
RU2042969C1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| ВЫХЛОПНАЯ СИСТЕМА ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, РАБОТАЮЩЕГО НА БЕДНЫХ СМЕСЯХ | 2009 |
|
RU2504668C2 |
| DE 2951108 A1, 02.07.1981. | |||

