Предлагаемое изобретение относится к области разработки конструкций корпусов радиоэлектронных блоков, используемых в пультах управления ракетными комплексами, расположенных в ограниченных, замкнутых объемах, например в модулях боевой машины пехоты или бронетранспортерах, для обеспечения связи между оператором и ракетой. Обычно осуществляют управление вручную при помощи рукояток, нажимных кнопок, рычагов и т.д., которые находятся на корпусе пульта управления. При этом должна быть обеспечена как прямая, так и обратная связь. Качество этой связи определяется согласованностью входных и выходных характеристик человека-оператора и пульта управления. Несмотря на высокую степень автоматизации современных устройств, окончательное решение всегда остается и будет оставаться за человеком. Оператор в замкнутой системе регулирования реагирует на раздражения, поступающие из внешнего мира, такие как появление противника, вертикальная вибрация от перемещений по пересеченной местности, особенно в сидячем положении, которые вызывают усталость и общее снижение эффективности работы, так как воздействуют на физическое и психическое состояние оператора. Этот ряд последовательных реакций должен закончиться действиями оператора, которые являются соответствующими реакциями на возбуждение. Для снятия волнения, утомляемости, повышения скорости сопровождения цели и своевременного осуществления пуска ракеты, актуальное значение приобретают вопросы удобного и рационального взаимодействия оператора и органов управления, что ведет в конечном счете к жизненно важному условию - выполнение боевой задачи.
Известен корпус прибора для установки и закрепления в нем субблоков [1], содержащий каркас, образованный соединенными между собой профильными элементами, в сечении каждого из которых выполнены крестообразные пазы, открытые стороны которых расположены во взаимно перпендикулярных плоскостях, размещенные в крестообразных пазах профилей элементы для их соединения и для закрепления устанавливаемых в корпусе прибора объектов и крепежные элементы. Внешний контур каждого из профиля выполнен Т-образной формы. На стороне вертикальной ножки Т-образного профиля, обращенной в сторону его горизонтальной полки, выполнены паз и смежный с ним выступ, а на ее противоположной стороне выполнена выборка. В выборку установлены стойки, выполненные с лицевой стороны, в виде двух ручек прямоугольной формы.
Недостаток конструкции состоит в том, что обе ручки выполнены одинаковой прямоугольной формы и оператор ощущает их однозначность. В боевой обстановке существует возможность в задержке воздействий на управляющие элементы, что не позволяет использовать корпус прибора для пульта управления в ракетном комплексе.
Известен также корпус блока, преимущественно для радиоэлектронных устройств [2], содержащий каркас, две ручки и поворотную панель. Одна ручка закреплена подвижно на кронштейнах, расположенных на лицевой стороне каркаса и панели, с возможностью поворота последней. А другая установлена на противоположном конце панели и снабжена фиксатором, взаимодействующим с кронштейнами каркаса.
Недостатком конструкции является то, что через поворотную панель неподвижная ручка имеет возможность колебаться от ударов, вибраций, эти колебания передаются на руки оператора и могут привести к промаху по цели. Также не ясна связь ручек с радиоэлектронными устройствами, что не позволяет использовать корпус в пульте управления для связи с оператором. Кроме того, кисти обеих рук оператора находятся в одном положении из-за одинаковой формы ручек, что при длительном нахождении на подвижном объекте вызывает усталость у оператора.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому корпусу пульта управления является конструкция корпуса электронного блока [3]. Блок содержит печатную плату с сигнальными входами, выходами и шиной, состоящей из сигнальных проводников, а также переднюю панель. Указанные входы и выходы электрически соединяются с сигнальными проводниками шины при помощи многополюсного контактного органа, приводимого в действие вручную рукояткой управляющего элемента. Рукоятка управляющего элемента выполнена в форме шара. На передней панели закреплен держатель, выполненный в форме плоской пластины, расположенной под рукояткой управляющего элемента.
Недостатками конструкции корпуса электронного блока являются:
- нет фиксации рукоятки управляющего элемента от вибрационных нагрузок, что не обеспечивает эффективное управление;
- отсутствует функциональная и физическая совместимость из-за шаровидности рукоятки, которая создает неудобства оператору при нахождении в подвижном объекте как в походном, так и в переходе в боевое положение, поскольку шар дает неустойчивое положение ладони руки оператора;
- затруднено использование держателя в форме плоской пластины как ручки из-за возможности получения травмы при движении объекта.
Задачей предлагаемого изобретения является повышение эффективности ракетных комплексов за счет улучшения эксплуатационных характеристик при работе с пультами управления.
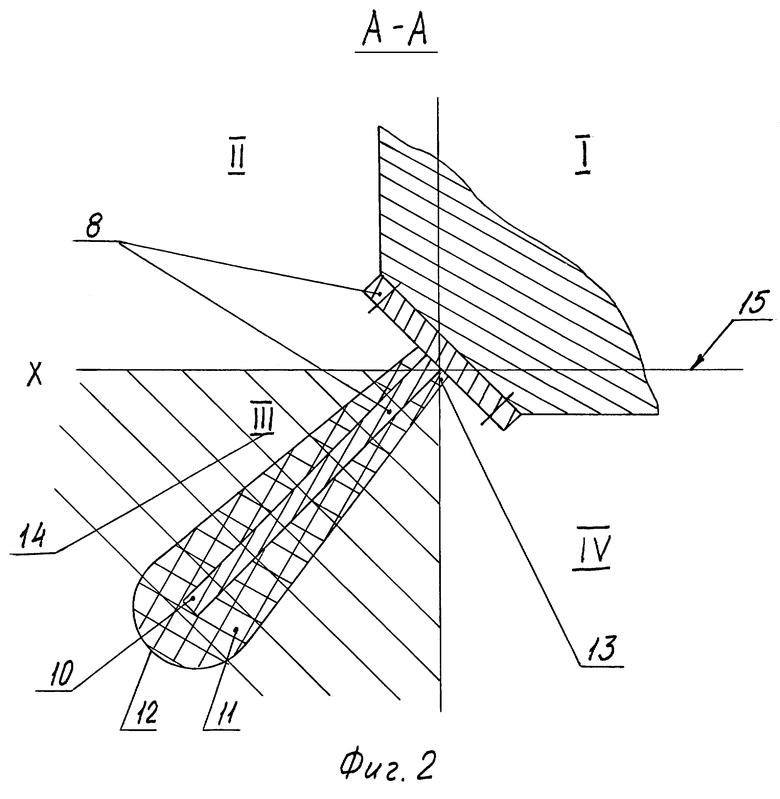
Поставленная задача достигается тем, что в корпусе пульта управления, размещенном в подвижном объекте, включающем переднюю панель, на которой закреплен держатель, рукоятку управляющего элемента для приведения в действие контактного органа вручную оператором и сигнальные входы и выходы, новым является то, что в нем держатель выполнен в виде ручки Т-образной формы с наклоном в третьей четверти от горизонтальной плоскости. При этом консольная часть ручки снабжена конусовидным упругим обтекателем, обращенным к передней панели меньшим основанием, которое расположено на одной горизонтальной оси с сигнальным выходом, установленным на передней панели, для возможности одновременного взаимодействия с обтекателем левой руки оператора. А рукоятка управляющего элемента выполнена трехзвенной, при этом первое звено имеет шарнирную связь с контактным органом, пропущено через второе звено с возможностью углового перемещения, при этом второе звено закреплено неподвижно на передней панели. Третье звено выполнено Г-образным и снабжено фиксатором с клиновым выступом, предназначенным для перемещения в двух профилированных пазах, выполненных во втором звене. Причем третье звено установлено перпендикулярно передней панели и закреплено со вторым звеном осью с возможностью обеспечения двух положений в вертикальной плоскости от правой руки оператора.
Конец консольной части ручки выполнен сферической формы.
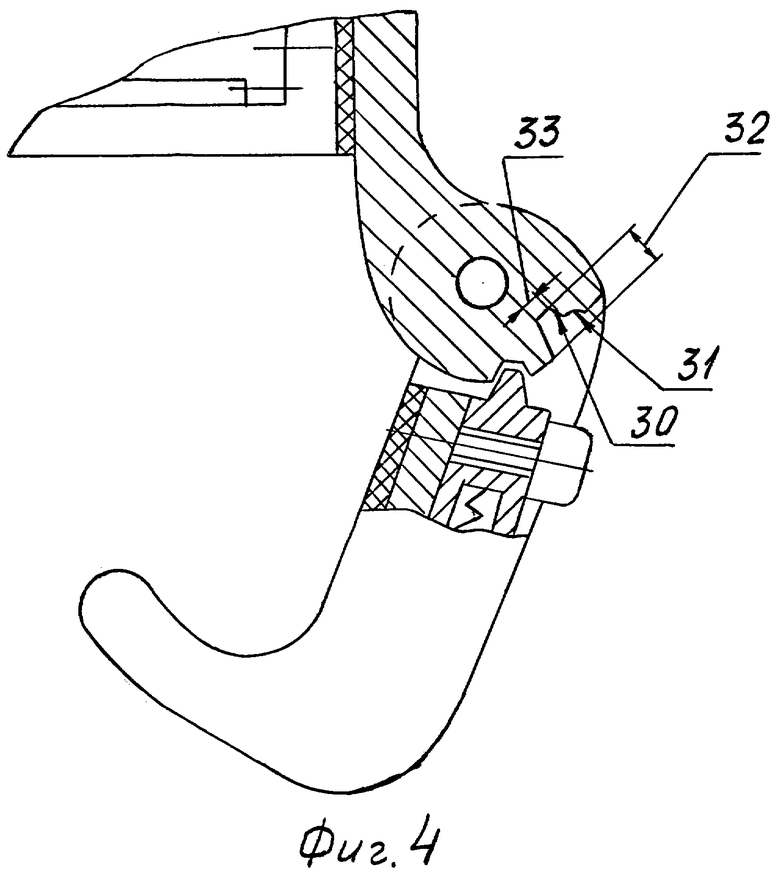
Одна боковая сторона клиновидного выступа выполнена с радиусом при вершине. Стенка первого профилированного паза сопряжена со вторым звеном по наружному радиусу. Стенка второго профилированного паза сопряжена со вторым звеном по внутреннему радиусу. Глубина и ширина второго профилированного паза больше глубины и ширины первого профилированного паза.
Максимальная эффективность действий оператора достигается разгрузкой плечевых мышц и мышц спины в области поясницы за счет удобства опор рук и исключения манипуляций для отыскания управляющих элементов и сигнальных входов.
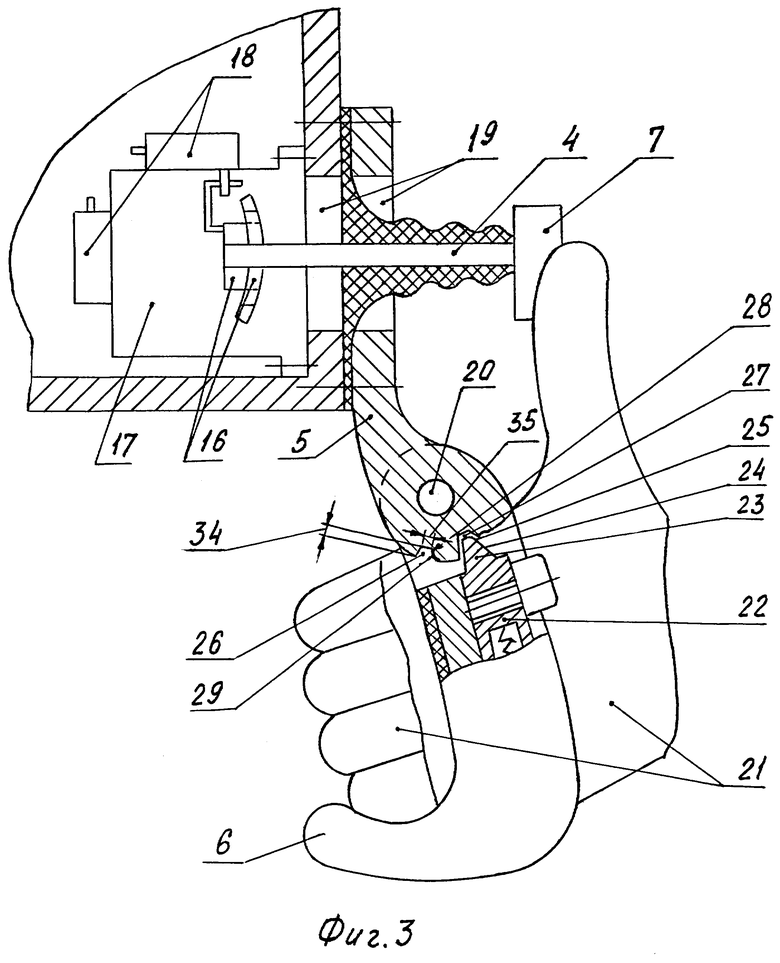
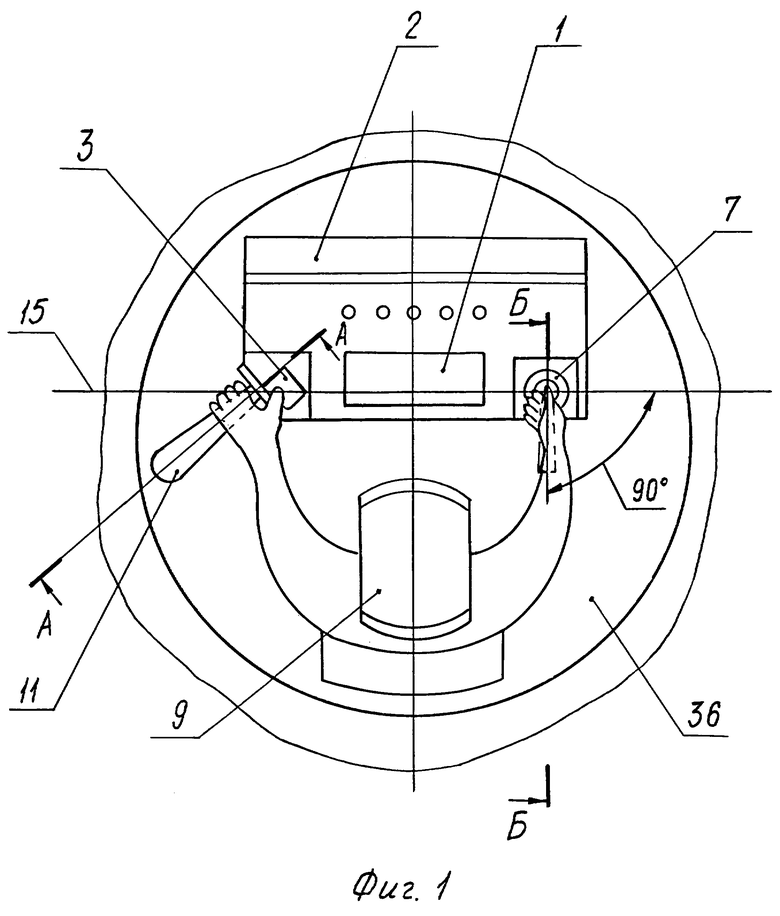
На фиг.1 изображен вид конструкции описываемого корпуса пульта управления с оператором, на фиг.2 - сечение (по А-А на фиг.1), на фиг.3 - сечение (по Б-Б по фиг.1), на фиг.4 - рукоятка управляющего элемента (третье звено) в исходном состоянии, где 1 - передняя панель, 2 - корпус пульта управления, 3 - сигнальный выход, 4 - первое звено, 5 - второе звено, 6 - третье звено, 7 - кнюппель, 8 - держатель-ручка Т-образной формы, 9 - оператор, 10 – консольная часть ручки Т-образной формы, 11 - обтекатель, 12 - конец консольной части ручки в виде сферы, 13 - основание обтекателя, 14 - третья четверть, 15 - горизонтальная ось, 16 - шарнир, 17 - контактный орган, 18 - сигнальный вход, 19 - окно, 20 - ось, 21 - рука оператора, 22 - фиксатор, 23 - клиновидный выступ фиксатора, 24 - боковая сторона клиноводного выступа, 25 - радиус, 26 - первый клинообразный профилированный паз, 27 - второй клинообразный профилированный паз, 28 - основание первого профилированного паза, 29 - наружный радиус, 30 - основание второго профилированного паза, 31 - внутренний радиус, 32 - глубина второго паза, 33 - ширина второго паза, 34 - глубина первого паза, 35 - ширина первого паза, 36 - подвижный объект.
Предлагаемая конструкция корпуса пульта управления выполнена следующим образом.
На передней панели 1 корпуса пульта управления 2 расположены сигнальный выход 3 и выступает рукоятка управляющего элемента, состоящая из трех звеньев 4, 5, 6 и кнюппеля 7 для удобства управления, а также держатель-ручка 8, способствующие выполнению боевой задачи оператору 9. Держатель-ручка 8 представляет собой стальную Т-образную консоль 10, покрытую конусовидным обтекателем 11, выполненным из резиноподобного материала. Обтекатель 11 на конце консольной части ручки 10 выполнен сферической формы 12 с уменьшением диаметра у основания 13 обтекателя 11. Держатель-ручка 8 размещена в третьей четверти 14 и с наклоном от горизонтальной оси 15. Основание 13 и сигнальный выход 3 расположены на одной горизонтальной оси 15. Первое звено 4 одним концом через шарнир 16 соединено с контактным органом 17, который воздействует на сигнальный вход 18, а другим концом - жестко с кнюппелем 7. Со стороны передней панели 1 первое звено 4 выполнено в герметичном исполнении и пропущено через окно 19 в передней панели 1 и окно 19 второго звена 5. Второе звено 5 жестко закреплено на передней панели 1 и через ось 20 соединено с третьим звеном 6, выполненным Г-образной формы и расположенным перпендикулярно передней панели 1 для удобства руки оператора 21. Внутри третьего звена 6 размещен подпружиненный фиксатор 22, оканчивающийся клиновидным выступом 23, одна боковая сторона 24 которого скруглена по радиусу 25. Этот выступ 23 может размещаться в первом клинообразном профилированном пазе 26 или во втором клинообразном профилированном пазе 27, выполненными во втором звене 6. В первом пазе 26 его основание 28 скруглено по наружному радиусу 29. А во втором пазе 27, в его основании 30, со стороны радиуса 25 фиксатора 22 выполнен внутренний радиус 31. Причем глубина 32 и ширина 33 второго паза 27 больше соответственно глубины 34 и ширины 35 первого паза 26.
Работа оператора 9 осуществляется следующим образом.
Через люк подвижного объекта 36 оператор 9 занимает рабочее место перед передней панелью 1 корпуса пульта управления 2. Третье звено 6 находится в исходном состоянии, когда клиновидный выступ 23 фиксатора 22 расположен в первом клинообразном профилированном пазе 26. При этом Г-образная форма третьего звена 6 расположена под корпусом пульта управления 2.
Это позволяет оператору 9 в ограниченном объеме подвижного объекта 36 иметь больше жизненного пространства. Оператор 9 выводит клиновидный выступ 23 фиксатора 22 из первого паза 26, поворачивает третье звено 6 вокруг оси 20 на себя до введения клиновидного выступа 23 фиксатора 22 во второй паз 27. Это рабочее положение третьего звена 6. Поворот третьего звена 6 осуществляется легко за счет перемещения радиуса 25 по радиусу 29. Правой рукой 21 оператор 9 охватывает третье звено 6, а большим пальцем может перемещать кнюппель 7 вместе с первым звеном 4 по всей плоскости окна 19 за счет шарнира 16 и управлять сигнальным входом 18. Левая рука оператора 9 располагается на обтекателе 11, большой палец которой воздействует на сигнальный выход 3 для осуществления пуска ракеты.
Предлагаемая конструкция корпуса пульта управления по сравнению с прототипом позволяет повысить эффективность ракетных комплексов за счет улучшения эксплуатационных характеристик при работе с пультами управления. Улучшение эксплуатационных характеристик достигается следующим образом:
- конусовидная обрезиненная ручка поджимает левую руку оператора к корпусу пульта управления и уменьшает вредное воздействие вибрации при движении объекта;
- наклон ручки в третью четверть создает удобную позу для оператора и позволяет распределить нагрузку на руку;
- расположение на одной горизонтальной оси сигнального выхода и основания ручки снижает усталость мышц между большим пальцем, который находится на сигнальном выходе (кнопка готовности пуска ракеты) и остальными пальцами левой руки, которые находятся на консольной части ручки;
- Т-образная форма ручки обеспечивает ее жесткость, что не позволяет непроизвольно перемещаться большому пальцу и исключает возможность временно не ощущать сигнальный выход;
- выполнение рукоятки управляющего элемента трехзвенной позволяет одновременно вертикально зафиксировать руку в Г-образном третьем звене и перемещать кнюппель с первым звеном в окне для воздействия на сигнальный вход, чем повышается точность сопровождения цели, поскольку вертикальное расположение пальца правой руки оператора создает эффект нулевого отсчета как по курсу, так и по тангажу;
- сферическая форма консольной части ручки и возможность изменения положения третьего звена за счет расположения подпружиненного фиксатора в любом из двух профилированных пазов снижает вероятность получения травм оператору;
- выполнение радиуса на клиновидном выступе и в пазах. а также разная глубина и ширина пазов увеличивает скорость перевода рукоятки управляющего элемента из исходного состояния в боевое и в этом положении более надежно выполняется фиксация рукоятки.
Кроме того, положение корпуса пульта управления, ручки и рукоятки не содержат информации об осуществляемом действии оператора, двигаются только большие пальцы обеих рук при выполнении боевой задачи, причем при отсутствии освещения внутри подвижного объекта максимально используется осязание оператора, следовательно, предлагаемая конструкция корпуса пульта управления дополняет друг друга. А для манипуляций руками не требуется поворота головы и отыскания во времени жизненно важных сигнальных входов и выходов при внезапном появлении противника.
Таким образом, предлагаемый корпус пульта управления вводит оператора, находящегося в ограниченном замкнутом объеме объекта, при появлении противника в режим релаксации, когда исчезают неприятные ощущения, психофизиологические напряжения и оператор входит в равновесное состояние, что в совокупности повышает эффективность выполнения боевой задачи.
Источники информации
1. Авторское свидетельство СССР № 1166351, кл. Н 05 К 5/00, 10.06.1981, аналог.
2. Авторское свидетельство СССР № 457196, М.Кл. Н 05 К 5/00, 16.05.1973, аналог.
3. Заявка ЕПВ (ЕР) № 0282867, МКИ 4 Н 05 К 7/14, H 01 H 1/40, G 06 F 15/40, 20.03.1987, прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНАЯ КОСИЛКА | 2009 |
|
RU2402190C1 |
| Самоходный ракетный комплекс | 2016 |
|
RU2620629C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| ПЕРЕНОСНОЙ ПУЛЬТ УПРАВЛЕНИЯ | 1992 |
|
RU2046563C1 |
| СПОСОБ СКРЕПЛЕНИЯ ПО ТОРЦУ ЛИНЕЙНЫХ РАЗРЕЗОВ ПРЕИМУЩЕСТВЕННО СТЕНОК КРОВЕНОСНОГО СОСУДА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2394508C1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ИЗОГНУТОЙ ВНЕШНЕЙ ПОВЕРХНОСТЬЮ НА УПОРЕ | 2016 |
|
RU2734789C2 |
| Фотоэкран А.Ф.Домрина | 1989 |
|
SU1720055A1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ВЫТАЛКИВАТЕЛЯМИ ПЕРЕМЕННОЙ ВЫСОТЫ ДЛЯ РАВНОМЕРНОГО ФОРМИРОВАНИЯ СКОБ | 2016 |
|
RU2734799C2 |
Изобретение относится к радиоэлектронике и может быть использовано в пультах управления ракетными комплексами. Технический результат заключается в повышении эффективности за счет улучшения эксплуатационных характеристик. Корпус содержит переднюю панель, на которой закреплен держатель, рукоятку управляющего элемента и сигнальные входы и выходы. Держатель выполнен в виде ручки Т-образной формы с наклоном в третьей четверти горизонтальной плоскости. Консольная часть ручки снабжена конусовидным упругим обтекателем, выполненным с уменьшением диаметра к его основанию. Рукоятка управляющего элемента выполнена трехзвенной. Первое звено имеет шарнирную связь с контактным органом и пропущено через второе звено с возможностью углового перемещения. Второе звено закреплено неподвижно на передней панели. Третье звено выполнено Г-образным и снабжено фиксатором с клиновым выступом, предназначенным для перемещения в двух профилированных пазах второго звена. 5 з.п. ф-лы, 4 ил.
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 0 |
|
SU282867A1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАМКАМИ ШАССИ САМОЛЕТА | 1999 |
|
RU2164879C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЕРТОЛЕТА | 1999 |
|
RU2150137C1 |
| ПОСТ УПРАВЛЕНИЯ ОПЕРАТОРА ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2137625C1 |
| Смеситель | 1976 |
|
SU626800A1 |

