Изобретение относится к дистанционному управлению объектами и, в частности, к элементам систем телеориентирования малогабаритных летательных аппаратов, а также может использоваться в различных информационно-измерительных системах.
В технике дистанционного управления объектами широкое применение нашел способ телеориентирования управляемых машин и аппаратов в оптическом луче [1] . В ряде современных систем телеориентирования заполнение оптическим потоком зоны телеориентирования при формировании оптического луча производится путем сканирования (по определенному закону) зоны модулированными плоскими лучами во взаимно-перпендикулярных направлениях, при этом информативный параметр излучения зависит от углового положения луча в пространстве относительно опорного направления, совпадающего с оптической осью визира. Сканирование лучом пространства осуществляется с помощью сканирующего механизма, связанного кинематически с валом привода.
Величина углового перемещения луча в пространстве по каждому из взаимно перпендикулярных направлений сканирования определяется перемещением проекции положения отклоняющего оптического элемента (например, цилиндрической линзы) на ось, совпадающую с соответствующим направлением сканирования, и связана определенной функциональной зависимостью с угловым перемещением вала привода сканирующего механизма. Так, например, при выполнении отклоняющей системы сканирующего механизма в виде цилиндрической линзы, совершающей под воздействием привода плоскопараллельное движение по окружности, вышеуказанная функциональная зависимость - синусоидальная.
Учитывая, что информативный параметр излучения в указанных системах телеориентирования определяется текущим угловым положением луча в пространстве относительно опорного направления, для обеспечения точного управления объектом в луче необходимо с большой точностью определять текущее угловое перемещение луча относительно опорного направления. В литературе известны устройства для определения линейных и угловых перемещений, выполненные на базе цифровых преобразователей угловых перемещений [2]. Большинство кодирующих преобразователей угла (КПУ) в настоящее время используют оптическую (фотоэлектрическую) систему считывания. Основным требованиям, предъявляемым к элементам систем управления малогабаритными летательными аппаратами, а именно: малыми габаритами и массой, низким энергопотреблением, низкой стоимостью и трудоемкостью изготовления - наиболее полно удовлетворяют накапливающие колирующие преобразователи. Схема такого накапливающего кодирующего преобразователя приведена на рис.2.21.[2]. Это устройство наиболее близко по технической сущности к заявляемому и выбрано в качестве прототипа. Устройство содержит жестко связанный с валом колирующий диск с нанесенной на нем кодовой дорожкой (равномерно нанесенные по кольцу чередующиеся радиальные прозрачные и непрозрачные штрихи-сегменты), аналогичной дорожкой направления со сдвинутыми на полсегмента штрихами и дорожкой начала отсчета единственным сегментом, три источника света, три оптоэлектронных преобразователя, каждый из которых содержит фотоприемник и усилители-формирователи, триггер, одновибратор и счетчик, выход которого является цифровым выходом устройства.
Недостатками устройства при использовании его для определения угловых перемещений сканирующего луча в малогабаритных системах телеориентирования управляемых объектов является большая погрешность определения текущего углового положения сканирующего луча.
Погрешность обусловлена конечной величиной разрешающей способности кодирующего диска, определяемой количеством штрихов на диске (порядка 200 - 300), ограниченным диаметром диска вследствие малогабаритности аппаратуры; линейной зависимостью кода выходного сигнала преобразователя от угла поворота кодирующего диска, жестко связанного с валом привода при нелинейной, в общем случае, зависимости углового перемещения сканирующего луча от угла поворота вала привода.
Целью изобретения является повышение точности определения текущего углового положения сканирующего луча в системах телеориентирования малогабаритных управляемых объектов.
Цель достигается тем, что в известное устройство, содержащее сканирующее устройство с электродвигателем и оптико-механический преобразователь, кинематически связанные между собой, первый и второй формирователи импульсов, первые входы которых подключены к первому и второму выходам оптико-механического преобразователя соответственно и двоичный счетчик, первый вход которого подключен к выходу второго формирователя импульсов введены последовательно соединенные формирователь пачек импульсов, временной дискриминатор и блок управления частотой вращения электродвигателя, выход которого подключен к электродвигателю сканирующего устройства, при этом выход первого формирователя импульсов подключен одновременно к первому воду формирователя пачек импульсов, второму входу второго формирователя импульсов и второму входу временного дискриминатора, кроме того, второй вход двоичного счетчика подключен к выходу формирователя пачек импульсов, задающий генератор, выход которого подключен к второму входу формирователя пачек импульсов и второму входу первого формирователя импульсов, третий вход которого подключен к выходу временного дискриминатора, при этом второй вход блока управления частотой вращения электродвигателя подключен к первому выходу оптико-механического преобразователя и функциональный преобразователь, вход которого подключен к выходу двоичного счетчика, а выход - является цифровым выходом устройства.
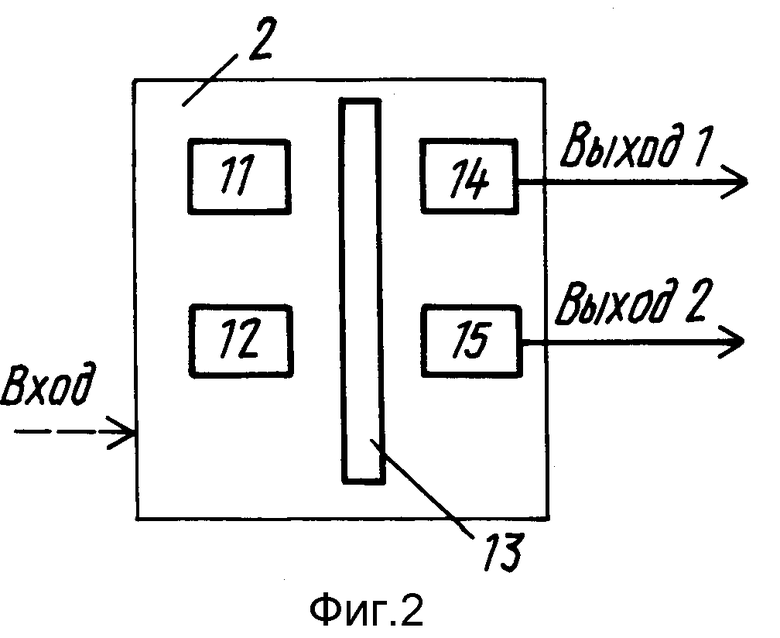
На фиг. 1 изображена функциональная блок-схема кодирующего оптического преобразователя угловых перемещений сканирующего луча в системах телеориентирования управляемых объектов. Функциональная блок-схема сдержит сканирующее устройство с электродвигателем 1, оптико-механический преобразователь 2, задающий генератор 3, первый формирователь импульсов 4, второй формирователь импульсов 5, формирователь пачек импульсов 6, временной дискриминатор 7, двоичный счетчик 8, блок управления частотой вращения электродвигателя 9, функциональный преобразователь 10.
На фиг. 2 приведена структурная схема оптико-механического преобразователя 2.
В его состав входят первый источник света 11, второй источник света 12, растр 13, первый оптоэлектронный преобразователь 14, второй оптоэлектронный преобразователь 15.
На фиг. 3 приведен фрагмент растра оптико-механического преобразователя; на фиг. 4 - эпюры сигналов в характерных точках устройства; на фиг. 5 - структурная схема блока управления частотой вращения электродвигателя 9.
В его состав входят первый усилитель-ограничитель 16, второй усилитель-ограничитель 17, инерционное звено 18, интегратор-сумматор 19, формирователь опорных напряжений 20, компаратор 21, усилитель мощности 22.
Устройство работает следующим образом.
При вращении электродвигателя сканирующего устройства 1, выполненного, например, в виде сканирующей рамки с закрепленными на ней цилиндрическими линзами отклоняющей системы и совершающими вместе с рамкой плоскопараллельное движение по окружности, вращается одновременно и растр 13 оптико-механического преобразователя 2, закрепленный на валу электродвигателя.
Растр (фиг. 3) оптико-механического преобразователя представляет собой диск с нанесенными на него прозрачными и непрозрачными штрихами, один из которых удлинен и служит для получения сигнала начала отсчета (сигнал опорного напряжения). Излучение от первого 11 и второго 12 источников света промодулированное растром преобразуется первым 14 и вторым 15 оптоэлектронными преобразователями в электрические сигналы.
Первый оптоэлектронный преобразователь 14 формирует сигналы, период следования которых равен
T1=Tвр/к,
где к - количество штрихов на растре;
Tвр - период вращения растра.
Второй оптоэлектронный преобразователь 15 формирует сигналы опорного напряжения, период следования которых равен периоду вращения растра (фиг.4, эпюра 1).
Сигнал на выходе первого оптоэлектронного преобразователя приведен на фиг.4, эпюра 2.
Импульсная последовательность с первого выхода оптико-механического преобразователя поступает на первый вход первого формирователя импульсов 4, осуществляющего преобразование входных импульсов в короткие импульсы, фронт которых совпадает с фронтом задающего генератора, задающий генератор 3 выполнен по схеме автоколебательного кварцевого генератора со стабильным периодом T0 (фиг.4, эпюра 3).
С второго выхода оптико-механического преобразователя импульсная последовательность поступает на первый вход второго формирователя импульсов 5.
Вид сигналов с выходов второго и первого формирователей приведены на фиг. 4., эпюры 4 и 5 соответственно. Первый и второй формирователи импульсов в варианте реализации выполнены на триггерах D-типа. Первый формирователь импульсов тактируется импульсами задающего генератора, а второй - импульсами с выхода первого формирователя импульсов.
Импульсы с выхода первого формирователя импульсов поступают на первый вход формирователя пачек импульсов 6, который формирует через интервал времени T2 с момента поступления входного импульса, следующего с периодом T1, пачку из n импульсов со стабильным периодом T2. При этом выполняется условие n•T2<T1 (фиг. 4, эпюра 6).
Формирователь пачек импульсов выполнен, например, на базе двоичного счетчика, работающего в режиме деления частоты на m.
Импульсы с выхода формирователя пачек импульсов 6 поступают на первый вход временного дискриминатора 7, который вырабатывает импульсный сигнал с длительностью, равной Δ = T1- n•T2 (фиг. 4, эпюра 7), который является сигналом, характеризующим величину отклонения частоты вращения двигателя от номинального значения.
Временной дискриминатор может быть выполнен, например, на базе двоичного счетчика, на счетный вход которого (вход 1) поступают импульсы с периодом следования T2, а обнуление счетчика осуществляется импульсом с периодом следования T1 с выхода блока 4 (фиг.4, эпюра 7). Сигнал временного дискриминатора имеет вид импульсов прямоугольной формы, следующих с периодом T1. Длительность этих импульсов обратно пропорциональна частоте вращения двигателя, причем при приближении к номинальной частоте импульсы становятся короче, а при превышении частоты - исчезают совсем. Сигнал с выхода временного дискриминатора поступает на первый вход блока управления частотой вращения электродвигателя 9 и на обнуляющий вход (вход 3) первого формирователя импульсов. В варианте реализации указанный сигнал проходит через первый усилитель-ограничитель 16, где нормируется по амплитуде и с его выхода нормированные импульсы поступают на вход инерционного звена 18. С выхода блока 18 усредненное значение сигнала поступает на первый вход интегратора-сумматора 19.
Сигнал с первого выхода оптико-механического преобразователя поступает на второй вход блока 9, где нормируется по амплитуде усилителем-ограничителем 17 и с его вывода поступает на второй вход интегратора-сумматора. На его третий вход подается постоянное напряжение с первого выхода формирователя опорных напряжений 20.
Прямоугольные импульсы с выхода усилителя-ограничителя 17 после интегрирования интегратором-сумматором 19 принимают треугольную форму, а сигнал с выхода инерционного звена 18 после интегрирования представляет собой сигнал ошибки по частоте вращения двигателя. Этот сигнал ошибки в виде постоянной составляющей вводит в закон управления интеграл по времени от величины отклонения скорости вращения двигателя от заданного значения, что обеспечивает высокую стабильность поддержания частоты вращения двигателя.
Сигнал с выхода интегратора 19 (фиг. 4, эпюра 8), имеющий вид треугольных импульсов постоянной амплитуды с переменной величиной постоянной составляющей, поступает на компаратор 21. Компаратор преобразует входной сигнал в сигнал с широтно-импульсной модуляцией, скважность импульсов которого изменяется от нуля до единицы в зависимости от величины постоянной составляющей на его входе, а период следования импульсов соответствует T1 (фиг. 4, эпюра 9). Поскольку постоянная составляющая на входе компаратора пропорциональна отклонению скорости вращения двигателя от номинальной, то и скважинность импульсов на выходе компаратора в замкнутом контуре управления определяется величиной скорости вращения электродвигателя с учетом момента нагрузки на его валу. Уровни постоянных напряжений с выходов блока 20 служат для задания номинальной частоты вращения двигателя. Выходной сигнал после компаратора 21 поступает на вход усилителя мощности 22.
В варианте реализации усилитель мощности представляет собой составной транзистор, в коллекторную цепь которого включен электродвигатель сканирующего устройства. В процессе разгона электродвигателя (скважинность выходных сигналов компаратора равна нулю) выходной транзистор усилителя мощности открыт и через электродвигатель протекает ток. По мере приближения скорости вращения электродвигателя к номинальной, коэффициент заполнения импульсной последовательности сигналов компаратора начинает изменяться от нуля к единице. Усилитель мощности начинает закрываться, уменьшая тем самым время протекания тока через электродвигатель, а следовательно, и скорость его вращения.
С выхода блока 6 импульсы, следующие с периодом T2, поступают на второй вход двоичного счетчика 8. Двоичный код, соответствующий порядковому номеру Ni импульсов относительно начала отсчета с выхода блока 8, поступает на вход функционального преобразователя 10. Обнуление счетчика 8 осуществляется импульсами, следующими с периодом Tвр с выхода блока 5. Функциональный преобразователь выполнен, например, на базе постоянного запоминающего устройства (ПЗУ). С выхода ПЗУ снимается код сигнала A, определяющего текущее положение сканирующего луча по закону
где
Ni - порядковый номер импульса от начала отсчета;
B - двоичное значение кода, определяющего положение луча при максимальном его отклонении от опорного направления;
f - функциональная зависимость, представленная в двоичных кодах и записанная в ПЗУ, связывающая перемещение луча в пространстве с угловым перемещением вала привода сканирующего механизма.
Таким образом, в течение интервала времени, равного Tвр, с выхода формирователя пачек импульсов снимается M=n•k импульсов, определяющих число фиксированных положений луча в пространстве за период сканирования. Это эквивалентно увеличению в n раз разрешающей способности оптико-механического преобразователя, а следовательно, и точности определения текущего углового положения сканирующего луча в системах телеориентирования малогабаритных управляемых объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 1997 |
|
RU2123166C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА МОДУЛЯЦИИ ИЗЛУЧЕНИЯ ОРТОГОНАЛЬНЫХ СКАНИРУЮЩИХ ЛУЧЕЙ В СИСТЕМАХ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2109246C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРИБОР | 2000 |
|
RU2166167C1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ (ЕГО ВАРИАНТЫ) | 1993 |
|
RU2088967C1 |
| ФОТОМЕТР | 1990 |
|
RU2007050C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВЛИВАНИЯ ИНФУЗИОННЫХ РАСТВОРОВ | 1995 |
|
RU2110284C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ШИРОКОПОЛОСНЫХ СИГНАЛОВ НА РАЗНЕСЕННЫЕ АНТЕННЫ | 2000 |
|
RU2189112C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ПРИЦЕЛА СИСТЕМЫ ТЕЛЕОРИЕНТИРОВАНИЯ С ИЗЛУЧАЮЩИМИ КАНАЛАМИ НА ИНЖЕКЦИОННЫХ ЛАЗЕРАХ | 1996 |
|
RU2115878C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |



Изобретение относится к области дистанционного управления объектами, в частности к элементам систем телеориентирования малогабаритных летательных аппаратов, а также может использоваться в различных информационно-измерительных системах. Задача, решаемая изобретением, - повышение точности определения текущего углового положения сканирующего луча в системах телеориентирования малогабаритных управляемых объектов. Устройство содержит сканирующее устройство с электродвигателем, оптико-механический преобразователь, первый и второй формирователи импульсов, двоичный счетчик, формирователь пачек импульсов, временный дискриминатор, блок управления частотой вращения электродвигателя, задающий генератор и функциональный преобразователь, соединенных определенным образом. 1 с.п. и 1 з.п.ф-лы, 4 ил.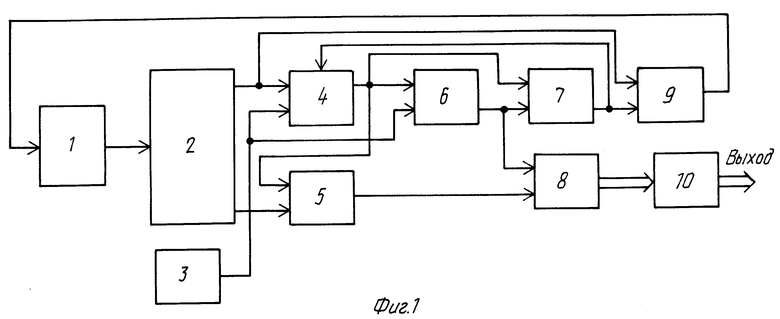
| Цукерман С.Т., Гридин А.С | |||
| Управление машинами при помощи оптического луча | |||
| - Л: Машиностроение, 1969 | |||
| Вульвет Дж., Датчики в цифровых системах: Пер | |||
| с анг | |||
| / Под ред | |||
| А.С.Яроменка | |||
| - М.: Энергоиздат, 1981, с.21 - 62. |

