Изобретение относится к области дистанционного управления машинами, в частности летательными аппаратами.
В современной технике дистанционного управления широкое применение нашел способ телеориентирования управляемых машин и аппаратов в оптическом луче (см., например, "Управление машинами при помощи оптического луча", С.Т.Цуккерман, А.С.Гридин, г. Ленинград, "Машиностроение", 1969 г.), сущность которого заключается в следующем. В пункте управления располагают прожектор (излучатель), который при помощи закрепленного с ним в общем корпусе оптического визира ориентируют в нужном направлении. Прожектор излучает оптический поток, модулированный таким образом, что каждой координате в пределах его поля зрения соответствует определенное значение информативного параметра, например частоты модуляции сигнала. Оптический поток излучается одновременно во всю зону управления (круг, характерное значение диаметра 6 - 8 метров). Таким образом формируется оптическое поле, в котором ориентируется объект управления.
Бортовая аппаратура управляемой машины (аппарата), приняв излученный прожектором поток, определяет значения информативного параметра, соответствующие координатам, и по этим значениям вырабатывает команды, приводящие управляемый объект на оптическую ось прожектора.
Излучатель включает источник оптического излучения, механический модулятор (растр) и проекционную оптику, создающую в поле зрения изображение растра.
Известно также устройство (прожектор) на основе инжекционных лазеров (патент N 2100745, БИ N 36, 1997 г.).
Прожектор содержит две аналогичные ветви (курсовую и тангажную), каждая из которых включает схему запуска, а также последовательно установленные инжекционный лазер, отклоняющий оптический элемент и объектив. Отклоняющие оптические элементы (выполнены в виде цилиндрических линз) и общая рамка, установленная в корпусе на коленчатых валиках с возможностью плоскопараллельного движения по окружности, образуют сканирующий узел, обслуживающий обе ветви. Входы схем запуска соединены с блоками кодирования сигналов курса и тангажа, входы которых подключены к выходам блока модуляции, входы которого соединены с приводом и программным устройством.
Данное устройство выбрано в качестве прототипа.
Недостаток известного устройства заключается в том, что для получения требуемого размера зоны управления (области пространства, в каждой точке которого присутствует оптический сигнал, содержащий информацию о линейных координатах данной точки) и требуемого для надежного управления уровня сигнала (определяется освещенностью зоны управления) во всем диапазоне изменения дальности до объекта управления (характерный диапазон 20 м - 5000 м) необходимо использовать объектив с изменяемым фокусным расстоянием (панкратика, трансфокатор). Это значительно усложняет конструкцию устройства, увеличивает его массу и энергопотребление: изменение фокусного расстояния достигается за счет подвижки вдоль оптической оси объектива одного или нескольких оптических компонентов. Это, в свою очередь, требует введения в состав устройства сложных электромеханических узлов. Необходимость возвращать подвижные компоненты трансфокатора в исходное состояние после завершения процесса управления приводит к увеличению времени на подготовку следующего рейса, требует подачи на прибор питания до производства пуска, что является сложной проблемой в том случае, когда прибор используется в переносных комплексах наведения ракет. В таких комплексах наземная аппаратура, как правило, питается от пиротехнических электробатарей, являющихся одноразовыми и инициирующимися непосредственно перед запуском летательного аппарата.
Принципиальной особенностью трансфокатора является невозможность обеспечить высокое качество изображения во всем диапазоне дальности до объекта управления, а также то, что положение оптической оси трансфокатора в пространстве изменяется при движении оптического компонента, обеспечивающего изменение фокусного расстояния. Указанные особенности приводят к соответствующим недостаткам устройств, использующих трансфокаторы, - снижению уровня сигнала и точности наведения.
Целью изобретения является упрощение конструкции и обеспечение требуемых размеров зоны управления и высокого уровня сигнала во всем диапазоне летательного аппарата.
Поставленная цель достигается тем, что в устройство, содержащее привод, блок модуляции, два блока кодирования, две схемы запуска и по крайней мере два канала, каждый из которых включает курсовую и тангажную излучающие ветви, каждая из которых включает последовательно установленные лазер, сканер и объектив, введены блок дальности, умножитель и два управляемых ключа, при этом первый выход блока дальности и выход привода соединены с входами умножителя, второй выход блока дальности - с первыми входами управляемых ключей, вторые входы управляемых ключей - с выходами схем запуска, а выходы управляемых ключей - с лазерами.
Сопоставительный анализ показал, что заявляемое устройство отличается от прототипа введением блоков: блока дальности, умножителя и управляемых ключей, а также их связями с остальными элементами системы.
Предложенная структура устройства позволила достигнуть поставленной цели, сообщив заявленному устройству положительные свойства, которыми известные устройства не располагали.
Решение поставленной задачи в заявляемом устройстве обусловлено созданием структуры, использующей важное свойство выбранного способа формирования зоны управления (полезная информация передается в узком сканирующем лазерном луче, модулируемом при изменении угла отклонения) - возможность изменять пеленгационную характеристику за счет модуляции сигналов запуска лазера. Это позволило использовать для формирования зоны управления набор объективов с фиксированными фокусными расстояниями в сочетании со сканирующим узлом, обслуживающим все объективы, а также предложенным набором электронных блоков, решить поставленную задачу. Созданное устройство имеет габариты и массу, существенно сниженные по сравнению с прототипом, просто по конструкции и надежно. Это позволяет использовать его не только в комплексах, располагаемых на носителях, а и в переносных комплексах. Такие комплексы имеют массовое применение, что подчеркивает важность решенной задачи.
Сущность предложения поясняется чертежами, где на фиг. 1 показана структурная схема (для определенности на ней показаны три канала), на фиг. 2, 3 и 4 - вариант конструкции оптикомеханической части применительно к трехканальной схеме.
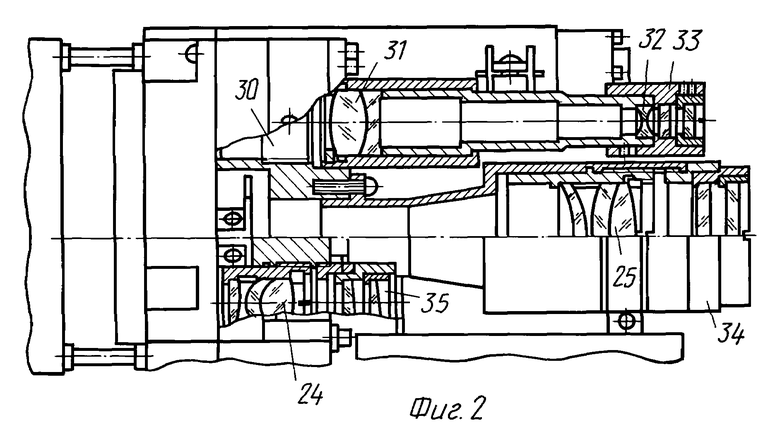
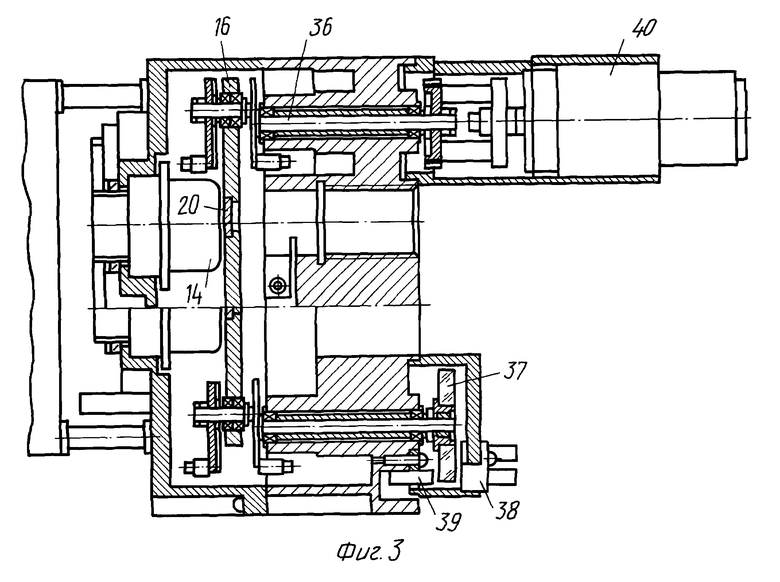
Устройство (фиг. 1) содержит блок дальности 1, умножитель 2, блок модуляции 3, блоки кодирования 4 и 5, схемы запуска 6 и 7, управляемые ключи 8 и 9, лазеры 10 - 15, рамку 16, сканеры (цилиндрические линзы) 17 - 22, объективы 23-28, привод 29. В состав устройства входят также (фиг. 2) оправа 30, линзы 31 и 32, оправы 33, 34 и 35 с оптическими клиньями. Коленчатые валы 36 (фиг. 3), растр 37, светодиод 38, фотодиод 39 и электродвигатель 40 входят в состав привода. Линзы 31 и 32 и оправа 30 образуют объектив 23.
Цилиндрические линзы ( сканеры) тангажных каналов 17, 18, 19 показаны на фиг. 1 в виде плосковыпуклых линз, цилиндрические линзы (сканеры) 20, 21, 22 курсовых каналов - в виде пластинок. Это отражает то, что оси цилиндрических поверхностей линз 17, 18, 19 расположены перпендикулярно плоскости рисунка, а оси цилиндрических поверхностей линз 20, 21, 22 - параллельно плоскости рисунка.
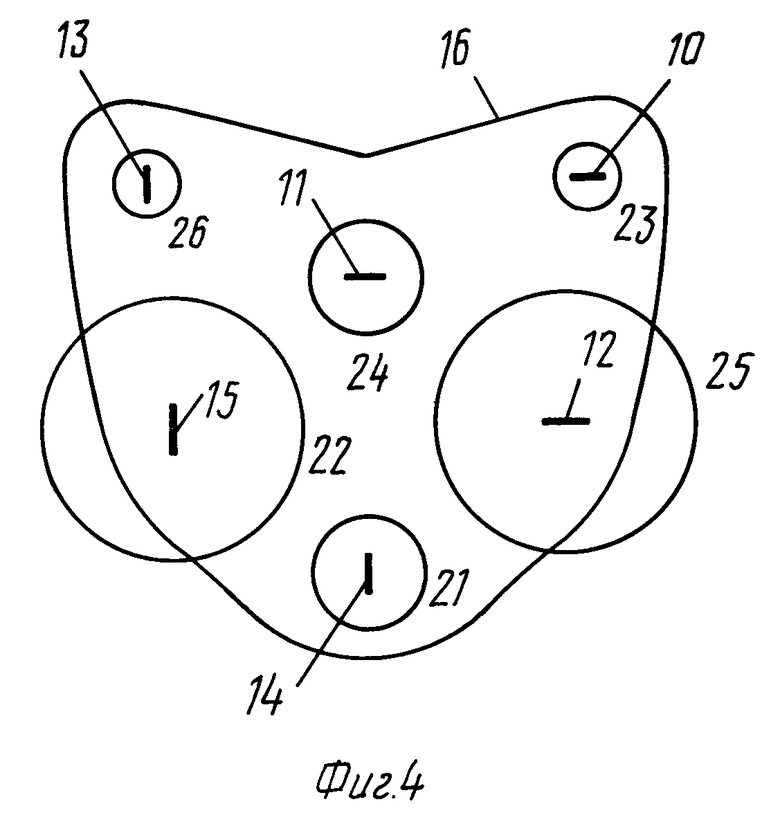
Взаимное расположение лазеров, рамки и зрачков объективов (вид по направлению оптической оси) показано на фиг. 4.
В состав устройства входят три канала, каждый из которых включает ветви курса и тангажа. Каждая ветвь образована установленными последовательно лазером, сканером и объективом. Тангажная ветвь первого канала (ветвь 1т) образована лазером 10, сканером 17 и объективом 23. Ветвь 1к образована лазером 13, сканером 20 и объективом 26. Ветвь 2т образована лазером 11, сканером 18 и объективом 24. Ветвь 2к образована лазером 14, сканером 21 и объективом 27. Ветвь 3т образована лазером 12, сканером 19 и объективом 25. Ветвь 3к образована лазером 15, сканером 22 и объективом 28.
Оптические клинья в оправах 33, 34 и 35, а также клинья, установленные за объективом 18, используются для регулировки направления оптических осей при настройке прибора.
Работает устройство следующим образом.
Оператор при помощи визира (на рисунках не показан) ориентирует устройство в нужном направлении. После этого он подает сигнал пуска на привод 29 и блок дальности 1. Привод 29 приводит в движение рамку 16. Рамка 16 с закрепленными на ней сканерами 17 - 22 начинает совершать плоскопараллельное движение по круговой траектории. Блок дальности 1 вырабатывает с учетом текущей дальности (определяется по времени на основании программы), параметров сканеров 17 и 20 и фокусного расстояния объективов 23 и 26 сигнал, поступающий на первый вход умножителя 2. На второй вход умножителя 2 с выхода привода 29 подается сигнал, определяющий угол поворота рамки 16. В результате на выходе умножителя 2 формируются сигналы, определяющие отклонение сканирующего луча от опорного направления в линейной мере. По этим сигналам блок модуляции 3 вырабатывает текущие значения информативных интервалов времени. По сигналам блока модуляции 3 блоки кодирования 4 и 5 вырабатывают сигналы, кодирующие излучение курсового и тангажного лазеров 10 и 13. В частном случае это могут быть последовательности посылок, каждая из которых состоит из двух импульсов ("двойка"). Интервал времени между одиночными импульсами, образующими "двойку", постоянен для каждой ветви, но имеет свое значение для каждой ветви. С выходов блоков кодирования 4 и 5 сигналы поступают на входы схем запуска 6 и 7 и далее на лазеры 10 и 13 первого канала. Лазеры излучают кодированные сигналы, которые вследствие того, что их изображения сканируют зону управления, заполняют поле зрения объективов 23 и 26 первого канала. В моменты, когда текущая дальность достигает заданного значения, соответствующего переходу на управление от первого канала на второй, блок дальности 1 вырабатывает сигналы переключения каналов, поступающие на управляющие входы управляемых ключей 8 и 9. Происходит срабатывание ключей 8 и 9, в результате к выходам схем запуска подключаются лазеры 11 и 14 второго канала, излучение которых фокусируется объективами 24 и 27. В момент, когда текущая дальность достигает значения, соответствующего переходу на управление от второго канала на третий, блок дальности 1 вырабатывает сигналы переключения каналов, поступающие с его второго выхода на управляющие входы управляемых ключей 8 и 9. Происходит срабатывание ключей 8 и 9, в результате к выходам схем запуска 6 и 7 через ключи 8 и 9 подключаются лазеры 12 и 15 третьего канала, излучение которых фокусируется объективами 25 и 28.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРИБОР | 2000 |
|
RU2166167C1 |
| КОДИРУЮЩИЙ ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ СКАНИРУЮЩЕГО ЛУЧА В СИСТЕМЕ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117901C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2326324C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ПРИЦЕЛА СИСТЕМЫ ТЕЛЕОРИЕНТИРОВАНИЯ С ИЗЛУЧАЮЩИМИ КАНАЛАМИ НА ИНЖЕКЦИОННЫХ ЛАЗЕРАХ | 1996 |
|
RU2115878C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| МНОГОКАНАЛЬНЫЙ ФОРМИРОВАТЕЛЬ ИЗЛУЧЕНИЯ ИНЖЕКЦИОННЫХ ПОЛУПРОВОДНИКОВЫХ ЛАЗЕРОВ | 1996 |
|
RU2112198C1 |
| ФОТОМЕТР | 1990 |
|
RU2007050C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА МОДУЛЯЦИИ ИЗЛУЧЕНИЯ ОРТОГОНАЛЬНЫХ СКАНИРУЮЩИХ ЛУЧЕЙ В СИСТЕМАХ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2109246C1 |
Изобретение относится к области дистанционного управления машинами, в частности летательными аппаратами. Технический результат изобретения - упрощение конструкции и обеспечение требуемых размеров зоны управления и высокого уровня сигнала во всем диапазоне дальности летательного аппарата. Сущность изобретения заключается в том, что в устройство, содержащее привод, блок модуляции, два блока кодирования, две схемы запуска и по крайней мере два канала, каждый из которых содержит курсовую и тангажную излучающие ветви, каждая из которых включает в себя последовательно установленные лазер, сканер и объектив, дополнительно введены блок дальности, умножитель и два управляемых ключа, соединенных между собой соответствующим образом. 4 ил.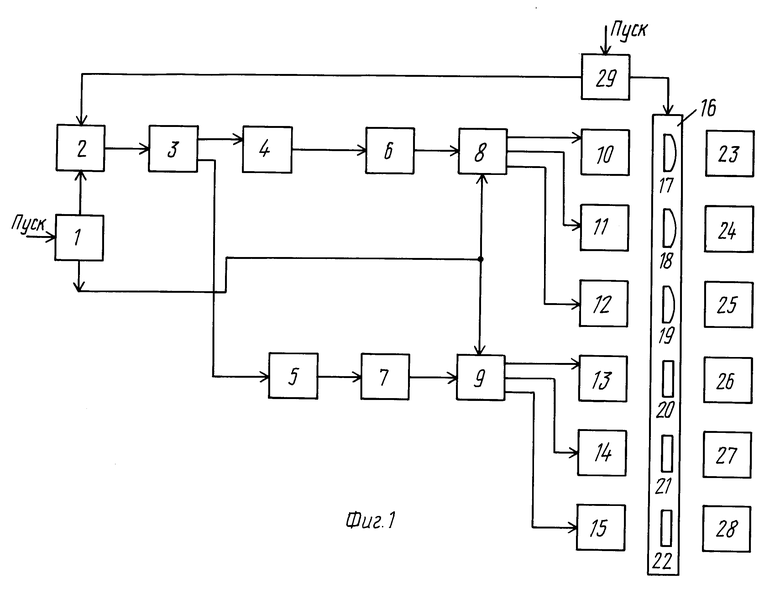
Устройство для формирования оптического поля для телеориентирования управляемых объектов, содержащее привод, блок модуляции, два блока кодирования, две схемы запуска и по крайней мере два канала, каждый из которых включает курсовую и тангажную излучающие ветви, каждая из которых включает последовательно установленные лазер, сканер и объектив, отличающееся тем, что в него введены блок дальности, умножитель и два управляемых ключа, при этом первый выход блока дальности и выход привода соединены с входами умножителя, второй выход блока дальности - с первыми входами управляемых ключей, вторые входы управляемых ключей - с выходами схем запуска, а выходы управляемых ключей - с лазерами.
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |
| US 4330099 A, 18.05.82 | |||
| US 4299360 A, 10.11.81 | |||
| DE 3441921 A1, 28.05.86 | |||
| DE 3149808 A1, 30.06.83. | |||

