Изобретение относится к измерительной технике и может быть использовано для повышения точности в магнитострикционных преобразователях перемещения.
Известен способ измерения перемещений, основанный на измерении времени прохождения ультразвуковой волны по волноводу из магнитострикционного материала от зоны возбуждения до зоны считывания [1].
Недостатком этого способа является невысокая точность, обусловленная затуханием ультразвуковой волны в волноводе.
Наиболее близким к изобретению по технической сущности является способ измерения линейных перемещений, реализованный в преобразователе линейных перемещений [2], в котором величина тока элемента возбуждения определяется величиной амплитуды импульса ультразвуковой волны, принимаемого элементом считывания.
Однако реализация данного способа приводит к уменьшению помехоустойчивости из-за необходимости операции измерения амплитуды принимаемого элементом считывания импульса ультразвуковой волны, что вызывает снижение точности измерений.
Задачей изобретения является повышение точности.
Поставленная задача решается тем, что в способе измерения линейных перемещений с помощью ультразвукового преобразователя, заключающемся в том, что измеряют время распространения ультразвуковой волны от неподвижного элемента возбуждения до подвижного элемента считывания, соединенного с контролируемым объектом, по значению этого времени судят о величине линейного перемещения перед циклом измерения только один раз за все время работы устанавливают подвижный элемент считывания на самое близкое расстояние к неподвижному элементу возбуждения и измеряют длительность импульса ультразвуковой волны, принимаемого элементом считывания и каждый раз перед измерением измеряют длительность импульса ультразвуковой волны, от значения длительности импульса ультразвуковой волны, измеренного при нахождении подвижного элемента считывания непосредственно около неподвижного элемента возбуждения вычитают значение длительности импульса ультразвуковой волны, измеренное после того, как подвижный элемент считывания переместился вместе с контролируемым объектом на измеряемое расстояние, и от этой разности зависит ток элемента возбуждения. Кроме того, каждый раз перед циклом измерения в приемной части устанавливается пороговое напряжение, в k раз большее напряжение шума, где k - коэффициент, определяемый требованиями к помехоустойчивости, а результирующий интервал времени tx, пропорциональный измеряемому перемещению, определяется из выражения: tх = (t1 + t2)/2, где t1 и t2 (фиг. 2) моменты срабатывания порогового устройства при приеме импульса ультразвуковой волны соответственно по переднему и заднему фронтам этого импульса.
Существо изобретения поясняется чертежами. На фиг. 1 представлена блок-схема устройства для осуществления данного способа измерения линейных перемещений, на фиг. 2 - изображение импульса ультразвуковой волны на входе порогового устройства.
Устройство для осуществления способа включает: звукопровод 1 из магнитострикционного материала; неподвижный элемент 2 возбуждения с элементом 3 подмагничивания подвижный элемент 4 считывания, жестко связанный с контролируемым объектом, с элементом 5 подмагничивания, акустические демпферы 6, размещенные на концах звукопровода 1; связанный с неподвижным элементом 2 возбуждения усилитель 7 импульсов возбуждения, вход которого подключен к выходу первого цифроаналогового преобразователя 8, на который через n-разрядную шину (где n - разрядность первого ЦАПа) подается код с порта А программируемого цифрового блока 10 управления; блок 9 синхронизации, связанный с программируемым цифровым блоком 10 управления сигналами: готовности ("Гот. "), установки ("Уст. 1" и "Уст. 2"), разрешения измерения ("Изм."); усилитель 12 импульсов считывания, ко входу которого подключен подвижный элемент 4 считывания, а к выходу - второй вход компаратора 13, на первый вход которого поступает сигнал с выхода второго цифроаналогового преобразователя 11, входы которого подключены через q-разрядную шину (где q - разрядность второго ЦАПа) к порту В программируемого цифрового блока 10 управления; схему 14 измерения длительности импульса, с выхода которой сигнал по l-разрядной шине (где l - разрядность кода длительности принимаемого сигнала) поступает в порт С программируемого цифрового блока 10 управления; схему 15 измерения времени распространения ультразвуковой волны, выдающую на порт D программируемого цифрового блока 10 управления m-разрядный код интервала времени, пропорционального перемещению, и на которую поступает сигнал с программируемого цифрового блока 10 управления и сигнал с компаратора 13, этот же сигнал поступает и на программируемый цифровой блок 10 управления и на схему 14 измерения длительности импульса; блок 16 индикации, вход которого соединен m-разрядной шиной с портом E программируемого цифрового блока 10 управления.
Пример конкретной реализации способа.
До начала цикла измерения линейного перемещения производятся две операции установки.
Сначала оператор с помощью блока 9 синхронизации формирует сигнал "Уст. 1", поступающий на программируемый цифровой блок 10 управления, который через второй цифроаналоговый преобразователь 11 выставляет на первый вход компаратора 13 некоторое напряжение, заведомо большее напряжения шума, на втором входе компаратора 13 будет напряжение, равное напряжению шума, т.к. во время операции "Установка 1" электрический сигнал на неподвижный элемент 2 возбуждения не поступает. Программируемый цифровой блок 10 управления через второй цифроаналоговый преобразователь 11 уменьшает напряжение на первом входе балансного компаратора 13 до тех пор, пока напряжения на обоих входах компаратора 13 не станут равными (о чем будет свидетельствовать появление сигнала логической единицы на выходе компаратора 13). После этого программируемый цифровой блок 10 управления с помощью второго цифроаналогового преобразователя 11 подает на первый вход компаратора 13 напряжение, равное k х Uшума, где k - коэффициент, который определяется требованиями к помехоустойчивости, и поддерживает это напряжение до следующего появления сигнала "Уст. 1" (это напряжение будет являться пороговым для приемной части устройства); после завершения операции "Установка 1" программируемый цифровой блок 10 управления подает на блок 9 синхронизации сигнал готовности "Гот.".
Операция "Установка 1" повторяется каждый раз перед циклом измерения, причем после включения устройства за операцией "Установка 1" следует операция "Установка 2", за которой следует цикл измерения.
Далее следует операция "Установка 2" после того, как подвижный элемент 4 считывания установлен на самое близкое расстояние к неподвижному элементу 2 возбуждения, оператор с помощью блока 9 синхронизации формирует сигнал "Уст. 2", по которому программируемый цифровой блок 10 управления с помощью первого цифроаналогового преобразователя 8 формирует сигнал максимальной амплитуды и подает этот сигнал на вход усилителя 7 импульсов возбуждения, который усиливает этот электрический сигнал и подает его на вход неподвижного элемента 2 возбуждения. Далее, вследствие прямого магнитострикционного преобразования в звукопроводе 1 возбуждается ультразвуковая волна, которая распространяется в обе стороны от неподвижного элемента 2 возбуждения. Распространяясь влево, ультразвуковая волна достигает акустического демпфера 6, на котором рассеивает свою энергию. Распространяясь вправо по звукопроводу 1 относительно неподвижного элемента 2 возбуждения, ультразвуковая волна достигает сначала подвижного элемента 4 считывания, а затем акустического демпфера 6, на котором и рассеивает свою энергию. Вследствие обратного магнитомеханического преобразования в подвижном элементе 4 считывания, в момент достижения его ультразвуковой волной, наводится электрический импульс, который после усиления в усилителе 12 импульсов считывания поступает на второй вход компаратора 13, по сигналу с выхода которого схема 14 измерения длительности импульса производит измерение длительности импульса ультразвуковой волны, принимаемого элементом 4 считывания. Измеренная и преобразованная в цифровой код схемой 14 измерения длительности импульса длительность импульса записывается в память программируемого цифрового блока 10 управления.
Операция "Установка 2" производится один раз за все время работы устройства - после включения устройства и проведения операции "Установка 1" операцией "Установка 1" и в дальнейшей работе устройства код, полученный в результате операции "Установка 2", используется в качестве образцового.
После завершения операции "Установка 2" программируемый цифровой блок 10 управления выставляет сигнал готовности "Гот." на блок 9 синхронизации. В ответ оператор через блок 9 синхронизации выставляет на программируемый цифровой блок 10 управления сигнал разрешения измерения "Изм.", по которому начинается цикл измерения, состоящий из двух операций: операции подстройки и собственно операции измерения.
Операция подстройки заключается в поддержании постоянной длительности импульса ультразвуковой волны, принимаемого элементом 4 считывания, за счет изменения амплитуды излучаемого сигнала, т.е. осуществляются те же действия, что и при операции "Установка 2", но с некоторыми отличиями: во-первых, подвижный элемент 4 считывания уже переместился вместе с контролируемым объектом на измеряемое расстояние, а во-вторых, длительность импульса ультразвуковой волны, принимаемого элементом 4 считывания, измеренная и преобразованная в код схемой 14 измерения длительности импульса, поступает в программируемый цифровой блок 10 управления и вычитается из образцового кода, полученного в результате операции "Установка 2", а код, полученный в результате этого вычитания, поступает на первый цифроаналоговый преобразователь 8, который на выходе формирует аналоговый сигнал с амплитудой, пропорциональной коду на его входах. Далее этот сигнал через усилитель 7 импульсов возбуждения поступает на неподвижный элемент 2 возбуждения. Одновременно с выставлением кода на входах первого цифроаналогового преобразователя 8 программируемый цифровой блок 10 управления формирует сигнал, запускающий схему 15 измерения времени распространения ультразвуковой волны. В подвижном элементе 4 считывания импульс ультразвуковой волны преобразуется в электрический сигнал, который поступает на второй вход компаратора 13. Цифровой импульс с выхода компаратора 13 поступает на схему 15 измерения времени распространения ультразвуковой волны и служит сигналом остановки работы этой схемы.
Одновременно с измерением схемой 15 измерения времени распространения ультразвуковой волны времени tx (фиг. 2) распространения ультразвуковой волны от элемента 2 возбуждения до элемента 4 считывания и преобразованием его в цифровой код Nt1 производится измерение схемой 14 измерения длительности импульса длительности принимаемого импульса ультразвуковой волны Δt (фиг. 2) и преобразование его в цифровой код NΔt. Полученные цифровые коды Nt1 и NΔt поступают в программируемый цифровой блок 10 управления, где вычисляется цифровой код интервала t2 (фиг. 2): Nt1 + NΔt , после чего производится вычисление результирующего кода времени распространения ультразвуковой волны от элемента 2 возбуждения до элемента 4 считывания : Ntx = (Nt1 + Nt2)/2 и выдача его на блок 16 индикации. Цикл измерения завершен.
Благодаря такой последовательности операций измерения и вычисления предлагаемый способ позволяет значительно повысить точность ультразвуковых преобразователей, во-первых, за счет уменьшения погрешности измерения времени распространения ультразвуковой волны в 1,41 раза, а во-вторых, за счет компенсации погрешности, вызванной затуханием импульсов ультразвуковой волны в звукопроводе.
Компенсация этой погрешности достигается тем, что ток элемента возбуждения определяется разностью образцового значения длительности импульса ультразвуковой волны, принимаемого элементом считывания, и рабочего значения длительности импульса ультразвуковой волны, принимаемого элементом считывания, измеренных соответственно при нахождении подвижного элемента считывания в непосредственной близости от неподвижного элемента возбуждения и когда подвижный элемент считывания уже переместился вместе с контролируемым объектом на измеряемое расстояние. При таких условиях измерения длительностей импульсов ультразвуковой волны, принимаемых элементом считывания, по значению разности этих длительностей можно судить об изменении длительности принимаемых импульсов ультразвуковой волны в зависимости от положения подвижного элемента считывания относительно неподвижного элемента 2 возбуждения, т.е. о величине затухания импульсов ультразвуковой волны в зависимости от расстояния, проходимого этими импульсами от зоны возбуждения до зоны считывания. Т. е., в конечном итоге, ток элемента возбуждения зависит от величины затухания импульсов ультразвуковой волны в звукопроводе.
Источники информации
1. Домрачев В.Г., Матвеевский В.Р., Смирнов Ю.С. Схемотехника цифровых преобразователей перемещений: Справочное пособие. - М.: Энергоатомиздат, 1987.
2. Авторское свидетельство СССР N 1394033, опублик. 07.05.88 Бюл. N 17.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2171967C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2125235C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2359222C2 |
| АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2090840C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2090839C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347187C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2109399C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ (ВАРИАНТЫ) | 2006 |
|
RU2332639C2 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ КРИТЕРИЯ ВОСПЛАМЕНЯЮЩЕЙ СПОСОБНОСТИ ИСКРОВЫХ РАЗРЯДОВ В СВЕЧАХ ЗАЖИГАНИЯ | 2000 |
|
RU2182336C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2374608C1 |
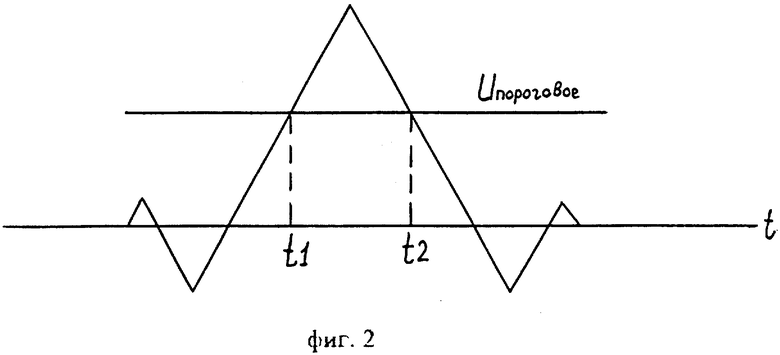
Изобретение относится к измерительной технике и может быть использовано для повышения точности в магнитострикционных преобразователях перемещения. Перед измерением времени распространения ультразвуковой волны от зоны возбуждения до зоны считывания только один раз за время работы устанавливают подвижный элемент считывания на самое близкое расстояние к неподвижному элементу возбуждения и измеряют длительность импульса ультразвуковой волны, принимаемого элементом считывания. Каждый раз перед измерением перемещения измеряют длительность импульса, от значения длительности импульса, измеренного при нахождении подвижного элемента считывания непосредственно около неподвижного элемента возбуждения, вычитают значение импульса, измеренное после того, как подвижный элемент переместился вместе с контролируемым объектом на измеряемое расстояние. Значение этой разности определяет ток элемента возбуждения. Результирующий интервал времени tx, пропорциональный измеряемому перемещению, определяют из выражения tx = (t1 + t2) / 2, где t1 и t2 моменты срабатывания порогового устройства при приеме импульса ультразвуковой волны соответственно по переднему и заднему фронтам этого импульса. 2 з.п.ф-лы, 2 ил.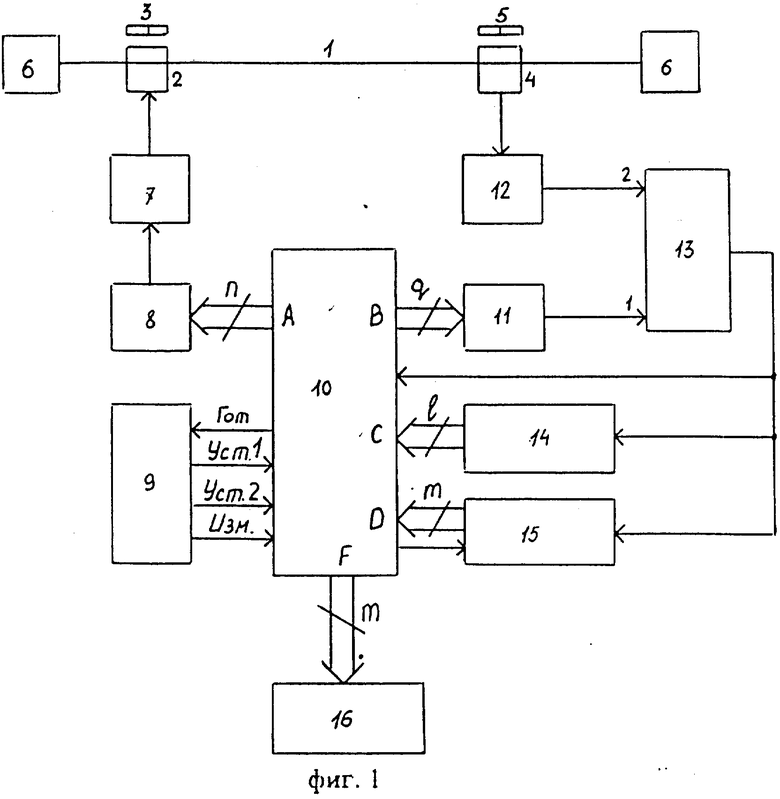
tx = (t1 + t2) / 2,
где t1 и t2 - моменты срабатывания порогового устройства при приеме импульса ультразвуковой волны соответственно по переднему и заднему фронтам этого импульса.
| SU, авторское свидетельство 1758429, G 01 B 17/00, 30.08.92 | |||
| SU, авторское свидетельство 1394033, G 01 B 17/00, 07.05.88. |
