Изобретение относится к измерительной технике и может быть использовано для измерения и контроля перемещения и скорости.
Известен преобразователь линейных перемещений, содержащий звукопровод, катушку возбуждения, катушку приема с подвижным постоянным магнитом, генератор, два фильтра, два усилителя [А.с. СССР №1252667, кл. G01B 17/00, 1986].
Недостатком преобразователя является ограниченная помехоустойчивость вследствие того, что помехи беспрепятственно проходят на выход.
Наиболее близким по технической сущности и достигаемому эффекту является магнитострикционный преобразователь перемещений, содержащий звукопровод, выполненный из магнитострикционного материала, на концах которого расположены демпферы, два постоянных магнита, расположенных соответственно в зоне действия катушки записи и катушки считывания, три усилителя, два фильтра, измеритель интервалов времени [Патент РФ №2093789, кл. G01B 17/00, 1997].
Недостатком преобразователя является низкая помехоустойчивость при воздействии импульсных помех.
Наиболее близким по технической сущности и достигаемому эффекту является способ измерения перемещений, заключающийся в том, что возбуждают в магнитострикционном звукопроводе электроакустическим преобразователем импульсный сигнал и принимают его электроакустическим приемником, измеряют время распространения ультразвукового импульса от неподвижного электроакустического преобразователя до подвижного акустоэлектрического преобразователя, соединенного с контролируемым объектом, по значению этого времени судят о величине линейного перемещения [А.с. СССР №1252667, кл. G01B 17/00, 1986].
Недостатком способа является ограниченная помехоустойчивость вследствие того, что помехи могут быть приняты за полезный сигнал.
Задачей, на решение которой направлено заявляемое изобретение, является повышение помехоустойчивости измерения линейных перемещений, а также расширение функциональных возможностей за счет введения новых элементов в схему.
Сигнал любой формы можно представить в виде суммы спектральных составляющих, полученных из ряда Фурье 
(Сергиенко А.Б. Цифровая обработка сигналов. - СПб.: Питер, 2003. - 23 с). В дальнейшем в описании будет использоваться термин компонента частоты fi для обозначения составляющей сигнала, проходящей через узкополосный фильтр с полосой пропускания от fi-Δf до fi+Δf, где 2Δf - полоса пропускания.
Поставленная задача достигается тем, что в способе измерения линейных перемещений возбуждают в магнитострикционном звукопроводе электроакустическим преобразователем импульсный сигнал и принимают его электроакустическим приемником, измеряют время распространения ультразвукового импульса от неподвижного электроакустического преобразователя до подвижного электроакустического приемника, соединенного с контролируемым объектом, по значению этого времени судят о величине линейного перемещения, в отличие от прототипа принимают и усиливают компоненты сигнала на частоте f1 и на частоте f2, причем результат измерения определяют по формуле
где  - интервал времени распространения компоненты частоты f1
- интервал времени распространения компоненты частоты f1
k - коэффициент, определяемый по дисперсионной характеристике звукопровода и равный отношению скоростей распространения компонент частот f1 и f2,
вычисленное значение ( ) принимают за результат измерения только при выполнении условия
) принимают за результат измерения только при выполнении условия
где ε - установленная заранее величина погрешности измерения;
 - измеренный интервал времени распространения компоненты частоты f2 по магнитострикционному звукопроводу.
- измеренный интервал времени распространения компоненты частоты f2 по магнитострикционному звукопроводу.
Поставленная задача достигается тем, что в известном устройстве, содержащем магнитострикционный звукопровод, три усилителя, два фильтра, первый измеритель интервалов времени, первый и второй демпферы, расположенные на концах магнитострикционного звукопровода, в отличие от прототипа введены генератор импульсных сигналов, выход которого соединен с входом первого усилителя, электроакустический преобразователь, неподвижно установленный на магнитострикционном звукопроводе, электроакустический приемник, установленный на звукопроводе с возможностью перемещения, или электроакустический преобразователь, установленный на звукопроводе с возможностью перемещения, электроакустический приемник, неподвижно установленный на магнитострикционном звукопроводе, устройство управления, вычислитель, второй измеритель интервалов времени, при этом первый выход устройства управления соединен с генератором импульсных сигналов, выход которого подключен к первому усилителю, электроакустический преобразователь соединен с выходом первого усилителя, второй выход устройства управления соединен с вычислителем, выход вычислителя соединен с устройством управления, входы второго и третьего усилителей соединены с электроакустическим приемником, вход первого узкополосного фильтра подключен к выходу второго усилителя, вход второго узкополосного фильтра соединен с выходом третьего усилителя, выход первого узкополосного фильтра подключен к второму входу первого измерителя интервалов времени, а выход второго узкополосного фильтра подключен к второму входу второго измерителя интервалов времени, первые входы первого и второго измерителей интервалов времени подключены к генератору импульсных сигналов, причем выходы первого и второго измерителей интервалов времени соединены с входными каналами А и В вычислителя, на канале С которого формируется выходной код.
Кроме того, второй усилитель и первый узкополосного фильтр могут быть объединены и выполнены в виде первого селективного усилителя, и третий усилитель и второй узкополосного фильтр могут быть объединены и выполнены в виде второго селективного усилителя.
Существо устройства поясняется чертежами, на фиг.1 изображена схема устройства измерения линейных перемещений, на фиг.2 и фиг.3 изображен наклонный участок дисперсионной кривой ультразвукового сигнала в магнитострикционном звукопроводе.
Устройство измерения линейных перемещений (фиг.1) содержит устройство 1 управления, первый выход которого соединен с входом генератора 2 импульсных сигналов, выход которого соединен с входом первого усилителя 3, выход которого соединен с электроакустическим преобразователем 4, неподвижно расположенным на магнитострикционном звукопроводе 5, электроакустический приемник 6, расположенный на магнитострикционном звукопроводе 5 и механически соединенный с подвижным объектом. Возможно расположение электроакустического преобразователя 4, механически соединенного с подвижным объектом, на магнитострикционном звукопроводе 5 электроакустического приемника 6, неподвижно расположенного на магнитострикционном звукопроводе 5. Первый демпфер 7 и второй демпфер 8, расположены на противоположных концах магнитострикционного звукопровода 5. Выход электроакустического приемника 6 соединен с входом второго усилителя 9 и с входом третьего усилителя 10. Выход второго усилителя 9 соединен с первым узкополосным фильтром 11 и выход третьего усилителя 10 соединен с вторым узкополосным фильтром 12. Выход генератора 2 импульсных сигналов соединен с первым входом первого измерителя 13 интервалов времени и первым входом второго измерителя 14 интервалов времени. Выход первого узкополосного фильтра 11 соединен с вторым входом первого измерителя 13 интервалов времени. Выход второго узкополосного фильтра 12 соединен с вторым входом второго измерителя 14 интервалов времени. Выход первого измерителя 13 интервалов времени соединен с входным каналом А вычислителя 15, входной канал В которого соединен с выходом второго измерителя 14 интервалов времени. Выход вычислителя 15 подключен к входу устройства 1 управления, второй выход которого соединен с входом вычислителя 15.
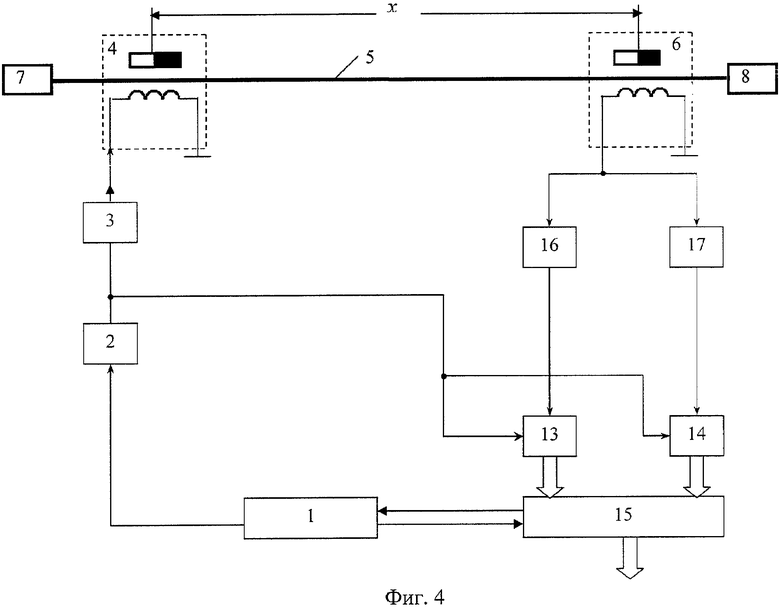
Кроме того, выход электроакустического приемника 6 соединен с входом первого селективного усилителя 16 и с входом второго селективного усилителя 17. Выход первого селективного усилителя 16 соединен с вторым входом первого измерителя 13 интервалов времени. Выход второго селективного усилителя 17 соединен с вторым входом второго измерителя 14 интервалов времени.
Устройство 1 управления известно и описано в литературе (Микро- и мини-ЭВМ/ Е.П.Балашов, В.Л.Григорьев, Г.А.Петров: Учебное пособие для вузов. - Л.: Энергоиздат. Ленингр. отд-ние, 1984, стр.84). Электроакустический преобразователь 4, преобразующий электрический сигнал в акустическую энергию, например, магнитострикционного типа известен и описан в литературе (Ультразвук. Маленькая энциклопедия/Под ред. Галяминой И.П., 1979, стр.196). Электроакустический приемник 6, преобразующий акустическую энергию в электрический сигнал, например, магнитострикционного типа, известен (Ультразвук. Маленькая энциклопедия/Под ред. Галяминой И.П., 1979, стр.196). Измерители 13 и 14 интервалов времени, известны и описаны в литературе (Новиков Ю.В. Основы цифровой схемотехники. Базовые элементы и устройства. Методы проектирования. 2001, стр.197). Вычислитель 15 известен и описан в литературе (Цапенко М.П. Измерительные информационные системы. - М.: Энергоиздат, 1985, стр.30).
Устройство измерения линейных перемещений работает следующим образом.
На первом выходе устройства 1 управления формируется импульс, который поступает на генератор 2 импульсных сигналов. На втором выходе устройства 1 управления формируется сигнал, который поступает на вход вычислителя 15 и запускает процесс вычисления. С выхода генератора 2 импульсных сигналов импульс поступает одновременно на вход первого усилителя 3, устанавливает первый измеритель 13 интервалов времени и второй измеритель 14 интервалов времени в начальное положение и запускает счет времени. Первый усилитель 3 вырабатывает сигнал, которым возбуждается электроакустический преобразователь 4. Электроакустический преобразователь 4 возбуждает в магнитострикционном звукопроводе 5 ультразвуковой импульс. Ультразвуковой импульс, распространяясь по магнитострикционному звукопроводу 5, достигает электроакустического приемника 6 через интервал времени, пропорциональный линейному перемещению объекта.
t=x/ν,
где х - измеряемое перемещение;
ν - скорость ультразвуковой волны в звукопроводе.
Распространяясь далее по магнитострикционному звукопроводу 5, ультразвуковой импульс достигает первого демпфера 7 и второго демпфера 8, расположенных на противоположных концах магнитострикционного звукопровода 5, и рассеивает на них свою энергию.
Излученный импульсный сигнал содержит определенный спектр частот, который можно определить разложением сигнала в ряд Фурье. Каждая компонента ряда Фурье имеет свою скорость распространения. Реальный магнитострикционный звукопровод 5 имеет дисперсионную характеристику, т.е. зависимость скорости распространения волн от частоты определенного вида (фиг.2) [Ультразвук. Маленькая энциклопедия/ Под ред. Галяминой И.П., 1979, стр.235].
С вывода электроакустического приемника 6 аналоговый сигнал одновременно поступает на вход второго усилителя 9 и на вход третьего усилителя 10. Сигналы с выходов второго усилителя 9 и третьего усилителя 10 поступают на первый узкополосный фильтр 11 и второй узкополосный фильтр 12 соответственно.
Первый узкополосный фильтр 11, настроенный на частоту f1, выделяет компоненту частоты f1 на второй вход первого измерителя 13 интервалов времени и останавливает счет времени , который равен времени распространения компоненты частоты f1. Второй узкополосный фильтр 12, настроенный на частоту f2, выделяет компоненту частоты f2 (фиг.2) на второй вход второго измерителя 14 интервалов времени и останавливает счет времени , который равен времени распространения компоненты частоты f2
Кроме того, с вывода электроакустического приемника 6 аналоговый сигнал одновременно поступает на вход первого селективного усилителя 16 и на вход второго селективного усилителя 17 (фиг.4). Первый селективный усилитель 16, настроенный на частоту f1, усиливает и выделяет компоненту частоты f1, которая поступает на второй вход первого измерителя 13 интервалов времени и останавливает счет времени , который равен времени распространения компоненты частоты f1. Второй селективный усилитель 17, настроенный на частоту f2, усиливает и выделяет компоненту частоты f2, которая поступает на второй вход второго измерителя 14 интервалов времени и останавливает счет времени .
На выходе первого измерителя 13 интервалов времени появляется код N1, равный времени  а на выходе второго измерителя 14 интервалов времени появляется код N2 равный времени . Код с выхода первого измерителя 13 интервалов времени поступает в входной канал А вычислителя 15, в входной канал В которого поступает код с выхода второго измерителя 14 интервалов времени.
а на выходе второго измерителя 14 интервалов времени появляется код N2 равный времени . Код с выхода первого измерителя 13 интервалов времени поступает в входной канал А вычислителя 15, в входной канал В которого поступает код с выхода второго измерителя 14 интервалов времени.
Вычислитель 15 выполняет следующие функции.
Сначала вычислитель 15 вычисляет значение времени распространения ультразвукового импульса по формуле
где k - коэффициент, который определяется по дисперсионной характеристике звукопровода и вычисляется по формуле:

где  - скорость распространения компоненты частоты f1, определяется из графика по фиг.2;
- скорость распространения компоненты частоты f1, определяется из графика по фиг.2;
 - скорость распространения компоненты частоты f2, определяется из графика по фиг.2;
- скорость распространения компоненты частоты f2, определяется из графика по фиг.2;
 - скорость распространяющейся компоненты частоты f1, которая выделена первым узкополосным фильтром 13;
- скорость распространяющейся компоненты частоты f1, которая выделена первым узкополосным фильтром 13;  - скорость распространяющейся компоненты частоты f2, которая выделена вторым узкополосным фильтром 14.
- скорость распространяющейся компоненты частоты f2, которая выделена вторым узкополосным фильтром 14.
После чего вычислитель 15 проверяет условие:
где ε - установленная заранее величина погрешности измерения.
Если условие выполняется, тогда в выходном канале С вычислителя 15 формируется код  пропорциональный расстоянию между электроакустическим преобразователем и объектом, перемещение которого измеряется. После окончания вычисления на выходе вычислителя 15 формируется импульс, по которому устройство 1 управления начинает формировать сигналы для нового цикла измерения, и процесс измерения перемещения подвижного объекта повторяется.
пропорциональный расстоянию между электроакустическим преобразователем и объектом, перемещение которого измеряется. После окончания вычисления на выходе вычислителя 15 формируется импульс, по которому устройство 1 управления начинает формировать сигналы для нового цикла измерения, и процесс измерения перемещения подвижного объекта повторяется.
Способ осуществляется следующим образом.
В магнитострикционном звукопроводе излучается один импульсный сигнал. Затем принимается импульсный сигнал, из которого выделяется компонента частоты f1 и компонента частоты f2. После этого измеряются интервалы времени и от момента возбуждения импульсного сигнала до момента выделения каждой компоненты этого импульсного сигнала на частотах f1 и f2 соответственно.
Время распространения ультразвукового импульсного сигнала от зоны возбуждения до зоны приема (), пропорциональное измеряемому перемещению, определяется из формулы:

где k - коэффициент, который определяется по дисперсионной характеристике звукопровода и вычисляется по формуле:
где  - скорость распространения компоненты частоты f1, определяется из графика по фиг.2;
- скорость распространения компоненты частоты f1, определяется из графика по фиг.2;
- скорость распространения компоненты частоты f2, определяется из графика по фиг.2;
- скорость распространяющейся компоненты частоты f1;
- скорость распространяющейся компоненты частоты f2.
Компонента частоты f1±Δf распространяется со скоростью υ1±Δυ (фиг.3).
Вычисленное значение () принимается за результат измерения, если выполняется условие:
где ε - установленная заранее величина погрешности измерения.
Благодаря такой последовательности операций измерения и вычисления предлагаемый способ позволяет значительно повысить помехоустойчивость за счет выделения компонент на разных частотах.
Описанная совокупность существенных признаков в известной литературе для решения поставленной задачи не встречается.
Основные доводы, доказывающие, что отношение / не зависит от температуры, заключаются в том, что плотность материала звукопровода и модуль Юнга материала звукопровода на частотах f1 и f2 изменяются пренебрежимо мало, но от температуры, например, модуль Юнга изменяется значительно. Для никеля температурный коэффициент модуля Юнга больше  [Ультразвук. Маленькая энциклопедия/ Под ред. Голяминой И.П., 1979, стр.191].
[Ультразвук. Маленькая энциклопедия/ Под ред. Голяминой И.П., 1979, стр.191].
Таким образом, достоинством данного устройства является повышение помехоустойчивости за счет использования кварцевых узкополосных фильтров, при этом уменьшается вероятность прохождения импульсных помех через узкополосный фильтр.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2359222C2 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2093789C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ (ВАРИАНТЫ) | 2006 |
|
RU2332639C2 |
| АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2099864C1 |
| АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2090840C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| Устройство для преобразованияпЕРЕМЕщЕНия B КОд | 1979 |
|
SU830469A1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1999 |
|
RU2149424C1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1992 |
|
RU2050559C1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1679187A1 |


Изобретение относится к измерительной технике и может быть использовано для измерения и контроля перемещения и скорости. Техническим результатом изобретения является повышение точности и помехоустойчивости, а также расширение функциональных возможностей. Предложены способ и устройство для его осуществления. Устройство измерения линейных перемещений содержит устройство управления 1 генератора импульсных сигналов 2, первый усилитель 3, электроакустический преобразователь 4, звукопровод 5, электроакустический приемник 6, первый демпфер 7 и второй демпфер 8, второй усилитель 9, третий усилитель 10, первый узкополосный фильтр 11, второй узкополосный фильтр 12, первый измеритель интервалов времени 13 и второй измеритель интервалов времени 14, вычислитель 15. 2 н. и 1 з.п. ф-лы, 4 ил.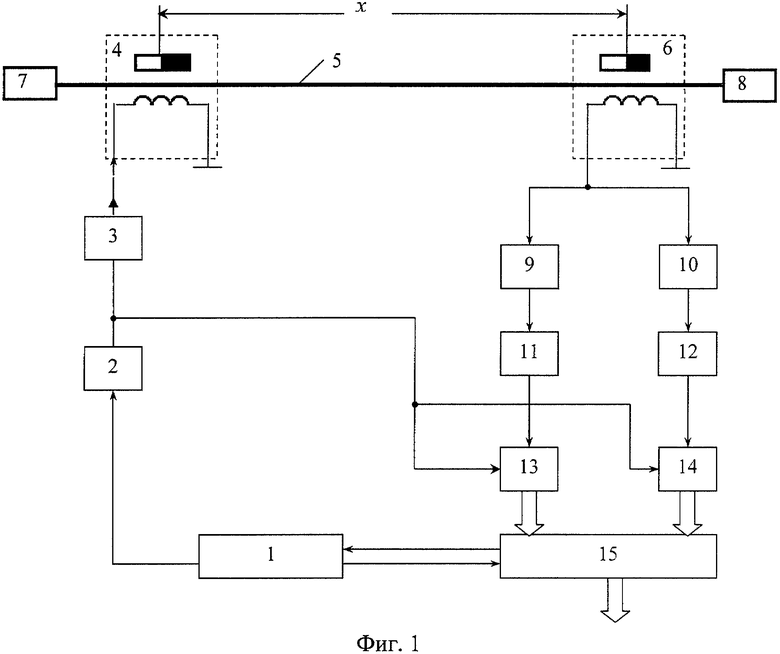
где - интервал времени распространения компоненты частоты f1;
- интервал времени распространения компоненты частоты f1;
k - коэффициент, определяемый по дисперсионной характеристике звукопровода и равный отношению скоростей распространения компонент частот f1 и f2,
вычисленное значение( ) принимают за результат измерения только при выполнении условия
) принимают за результат измерения только при выполнении условия

где ε - установленная заранее погрешность измерения;
 - интервал времени распространения компоненты частоты f2 по магнитострикционному звукопроводу.
- интервал времени распространения компоненты частоты f2 по магнитострикционному звукопроводу.
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2093789C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ | 2004 |
|
RU2271515C1 |
| RU 2052767 С1, 20.01.1996 | |||
| Способ измерения перемещений и устройство для его реализации | 1985 |
|
SU1252667A1 |
| JP 5034133 А, 09.02.1993. | |||

