Изобретение относится к измерительной технике и может быть использовано для повышения точности в магнитострикционных преобразователях перемещения.
Наиболее близким по технической сущности и достигаемому эффекту является устройство измерения линейных перемещений, содержащее магнитострикционный звукопровод, неподвижный электроакустический преобразователь, подвижный электроакустический приемник, жестко связанный с контролируемым объектом, акустические демпферы, усилитель, программируемый цифровой блок управления, измеритель итервалов времени [Патент РФ №2117914, кл. G01B 17/00, 1998].
Недостатком этого устройства является невысокая точность, обусловленная нестабильностью параметров неподвижного элемента возбуждения и подвижного элемента считывания из-за внешних факторов, например температуры.
Наиболее близким по технической сущности и достигаемому эффекту является способ измерения линейных перемещений, заключающийся в том, что измеряют время распространения ультразвуковой волны по магнитострикционному звукопроводу до подвижного электроакустического приемника, соединенного с контролируемым объектом и по значению этого времени судят о величине линейного перемещения, перед каждым циклом измерения в приемной части устанавливают пороговое напряжение, определяемое требованиями к помехоустойчивости [Патент РФ №2125235, кл. G01B 17/00, 1998].
Недостатком этого способа является невысокая точность, обусловленная нестабильностью параметров импульса вследствие возникновения переходных процессов в индуктивности, нестабильностью сопротивления индуктивности в зависимости от изменения температуры.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности за счет уменьшения погрешности измерения времени распространения ультразвуковой волны из-за учета нестабильности параметров электроакустических приемников и электроакустического преобразователя вследствие изменения температуры.
Переходной процесс при приеме сигналов характеризуется постоянной времени, которая зависит от таких параметров электроакустических приемников, как индуктивность и сопротивление. Например, при увеличении температуры индуктивность электроакустических приемников изменяется, т.к. зависит от геометрических размеров и магнитной проницаемости материала, из которого сделаны электроакустические приемники. Если электроакустические приемники выполнены идентичными, то погрешность, связанная с переходным процессом в электроакустических приемниках, существенно уменьшается.
Поставленная задача достигается тем, что в предлагаемом способе, по которому перед циклом измерения в приемной части устанавливают пороговое напряжение, больше уровня шума, и измеряют время распространения ультразвуковой волны по магнитострикционному звукопроводу до подвижного электроакустического приемника, соединенного с контролируемым объектом, и по значению этого времени судят о величине линейного перемещения, согласно изобретению устанавливают подвижный электроакустический приемник на максимально удаленное расстояние от электроакустического преобразователя и подвижным электроакустическим приемником измеряют величину уровня шума Uш в магнитострикционном звукопроводе при отсутствии полезного сигнала, устанавливают величину порогового напряжения Uпорог больше величины уровня шума:
Uпорог>Uш,
измеряют время распространения ультразвуковой волны по магнитострикционному звукопроводу от момента срабатывания первого усилителя-формирователя до момента срабатывания второго усилителя-формирователя и по значению этого времени судят о величине линейного перемещения объекта.
Поставленная задача достигается тем, что в устройство, содержащее магнитострикционный звукопровод, неподвижный электроакустический преобразователь, подвижный электроакустический приемник, жестко связанный с контролируемым объектом, акустические демпферы, первый усилитель, программируемый цифровой блок управления, измеритель интервалов времени, согласно изобретению введены генератор импульсных сигналов, неподвижный электроакустический приемник, установленный на звукопроводе на расстоянии а от электроакустического преобразователя, управляемый источник порогового напряжения, первый усилитель-формирователь, второй усилитель-формирователь, второй усилитель, выпрямитель, аналого-цифровой преобразователь (АЦП), при этом первый выход программируемого цифрового блока управления соединен с генератором импульсных сигналов, выход которого соединен с первым усилителем, второй выход программируемого цифрового блока управления соединен с управляемым источником порогового напряжения, выход неподвижного электроакустического приемника соединен с вторым входом первого усилителя-формирователя, первый вход которого соединен с первым выходом управляемого источника порогового напряжения, выход подвижного электроакустического приемника соединен с вторым входом второго усилителя-формирователя и с входом второго усилителя, выход которого соединен с входом выпрямителя, выход которого соединен с входом АЦП, выход АЦП соединен с входным каналом А программируемого цифрового блока управления, первый вход второго усилителя-формирователя соединен с вторым выходом управляемого источника порогового напряжения, выход первого усилителя-формирователя соединен с первым входом измерителя интервалов времени, второй вход которого соединен с выходом второго усилителя-формирователя, второй выход измерителя интервалов времени соединен с первым входом программируемого цифрового блока управления, с вторым выходом которого соединен вход управляемого источника порогового напряжения, третий выход программируемого цифрового блока управления соединен с третьим входом измерителя интервалов времени.
Изобретение поясняется чертежом, на котором изображена схема устройства.
Устройство для реализации способа содержит программируемый цифровой блок 1 управления, первый выход которого соединен с входом генератора 2 импульсных сигналов, выход которого соединен с входом первого усилителя 3, выход которого соединен с неподвижным электроакустическим преобразователем 4, охватывающим магнитострикционный звукопровод 5, неподвижный электроакустический приемник 6, расположенный на фиксированном минимально возможном расстоянии а от неподвижного электроакустического преобразователя 4 и охватывающий магнитострикционный звукопровод 5, подвижный электроакустический приемник 7, охватывающий магнитострикционный звукопровод 5 и механически соединенный с подвижным объектом. Неподвижный электроакустический приемник 6 и подвижный электроакустический приемник 7 выполнены с идентичными характеристиками. Первый акустический демпфер 8 и второй акустический демпфер 9 расположены на противоположных концах магнитострикционного звукопровода 5. Выход неподвижного электроакустического приемника 6 соединен с вторым входом первого усилителя-формирователя 10, первый вход которого соединен с первым выходом управляемого источника 11 порогового напряжения. Выход подвижного электроакустического приемника 7 соединен с вторым входом второго усилителя-формирователя 12 и с входом второго усилителя 13. Выход второго усилителя 13 соединен с входом выпрямителя 14, выход которого соединен с входом АЦП 15. Выход АЦП 15 соединен с входным каналом А программируемого цифрового блока 1 управления. Первый вход второго усилителя-формирователя 12 соединен с вторым выходом управляемого источника 11 порогового напряжения. Выход первого усилителя-формирователя 10 соединен с первым входом измерителя 16 интервалов времени, второй вход которого соединен с выходом второго усилителя-формирователя 12. Второй выход измерителя 16 интервалов времени соединен с первым входом программируемого цифрового блока 1 управления. Вход управляемого источника 11 порогового напряжения соединен с вторым выходом программируемого цифрового блока 1 управления, третий выход которого соединен с третьим входом измерителя 16 интервалов времени.
Программируемый цифровой блок 1 управления известен и описан в литературе (Цапенко М.П. Измерительные информационные системы: Структуры и алгоритмы, схемотехническое проектирование: Учеб. пособие для вузов, 1985, стр.52). Электроакустический преобразователь 4, преобразующий электрический сигнал в акустическую энергию, например, магнитострикционного типа известен и описан в литературе (Ультразвук. Маленькая энциклопедия. / Под ред. Галяминой И.П., 1979, стр.196). Электроакустические приемники 6 и 7, преобразующие акустическую энергию в электрический сигнал, например, магнитострикционного типа известны и описаны в литературе (Ультразвук. Маленькая энциклопедия. / Под ред. Галяминой И.П., 1979, стр.196). Управляемые источники 11 и 20 опорного напряжения известны и описаны в литературе (Лачин В.И., Савелов П.С. Электроника: Учеб. пособие, 2002, стр.514). Выпрямитель 14 известен и описан в литературе (Лачин В.И., Савелов Н.С. Электроника: Учеб. пособие, 2002, стр.297). Аналого-цифровые преобразователи 15 и 19 известны и описаны в литературе (Аналоговая и цифровая электроника (полный курс): Учебник для вузов. Под ред. О.П.Глудкина, 2003, стр.755). Измеритель 16 интервалов времени известен и описан в литературе (Новиков Ю.В. Основы цифровой схемотехники. Базовые элементы и устройства. Методы проектирования. 2001, стр.197).
Устройство работает следующим образом.
Всего один раз перед циклом измерений подвижный электроакустический приемник 7 устанавливается на максимально удаленное расстояние от электроакустического преобразователя 4 (предельное значение диапазона измерения). С выхода подвижного электроакустического приемника 7 сигнал, равный величине уровня шума в магнитострикционном звукопроводе, поступает на вход второго усилителя 13, который усиливает величину уровня шума Uш, который затем передается на вход выпрямителя 14. С выхода выпрямителя 14 сигнал поступает на вход АЦП 15. С выхода АЦП 15 цифровой код, пропорциональный уровню шума Uш, поступает во входной канал А программируемого цифрового блока 1 управления, на втором выходе которого формируется сигнал управления, который поступает на вход управляемого источника 11 порогового напряжения и задает величину уровня порогового напряжения Uпорог больше величины уровня шума Uш, так что
Uпорог>Uш.
Затем следует цикл измерений.
На первом выходе программируемого цифрового блока 1 управления формируется управляющий сигнал, который поступает на вход генератора 2 импульсных сигналов. С третьего выхода программируемого цифрового блока 1 управления поступает сигнал на третий вход измерителя 16 интервалов времени и разрешает работу. Импульс с выхода генератора 2 импульсных сигналов поступает на вход первого усилителя 3. Первый усилитель 3 вырабатывает сигнал, которым возбуждается электроакустический преобразователь 4. Электроакустический преобразователь 4 возбуждает в магнитострикционном звукопроводе 5 ультразвуковые волны. Ультразвуковые волны, распространяясь по магнитострикционному звукопроводу 5 в обе стороны, достигают акустического демпфера 8 и затухают, с другой стороны достигают сначала неподвижного электроакустического приемника 6, подвижного электроакустического приемника 7, соединенного с подвижным объектом, перемещение которого измеряется, затем акустического демпфера 9 и затухают. С выхода неподвижного электроакустического приемника 6 аналоговые импульсы поступают на второй вход первого усилителя-формирователя 10. На первый вход первого усилителя-формирователя 10 поступает пороговое напряжение с первого выхода управляемого источника 11 порогового напряжения. Импульс с выхода первого усилителя-формирователя 10 поступает на первый вход измерителя 16 интервалов времени, устанавливает его в начальное состояние и запускает счет времени. С выхода подвижного электроакустического приемника 7 аналоговые импульсы поступают на второй вход второго усилителя-формирователя 12. На первый вход второго усилителя-формирователя 12 поступает пороговое напряжение с второго выхода управляемого источника 11 порогового напряжения. Импульс с выхода второго усилителя-формирователя 12 поступает на второй вход измерителя 16 интервалов времени и останавливает счет времени. На первом выходе измерителя 16 интервалов времени формируется код, пропорциональный расстоянию между неподвижным электроакустическим приемником 6 и подвижным электроакустическим приемником 7, соединенным с контролируемым объектом, перемещение которого измеряется. На втором выходе измерителя 16 интервалов времени появляется сигнал, который поступает на первый вход программируемого цифрового блока 1 управления и останавливает цикл измерения. На первом выходе программируемого цифрового блока 1 управления формируется импульс, по которому производится запуск генератора 2 импульсных сигналов, и процесс измерения перемещения подвижного объекта повторяется.
Пример реализации способа.
До начала цикла измерения линейного перемещения производится операция установки.
Операция установки заключается в том, что подвижный электроакустический приемник 7 устанавливают на максимально удаленное расстояние от электроакустического преобразователя 4 и подвижным электроакустическим приемником 7 измеряют величину уровня шума Uш в магнитострикционном звукопроводе 5 при отсутствии полезного сигнала. Формируют тестовый импульс и измеряют величину амплитудного значения полезного сигнала Uам подвижным электроакустическим приемником 7. Затем устанавливают величину порогового напряжения для источника порогового напряжения, удовлетворяющую условиям:
Uш<Uпорог.
Отличительными особенностями способа является то, что, во-первых, подвижным электроакустическим приемником производится измерение уровня шума и амплитудного значения полезного сигнала до начала измерения, т.к. уровень шума на неподвижном электроакустическом приемнике отличается от уровня шума на подвижном электроакустическом приемнике, и если уровень шума хотя бы на одном из электроакустических приемников превысит пороговое напряжение, тогда измерение становится невозможным, а во-вторых, время начала отсчета определяется по моменту прихода импульса с неподвижного электроакустического приемника, т.е. исключается влияние нестабильности переходных процессов при формировании выходной ЭДС в электроакустических приемниках при наличии внешних дестабилизирующих факторов, одинаково изменяющих параметры двух электроакустических приемников. Неподвижный электроакустический приемник и подвижный электроакустический приемник должны быть выполнены идентичными. Время нарастания фронта импульса (переходной процесс) при приеме характеризует постоянная времени, которая зависит от параметров электроакустических приемников (индуктивности, сопротивления), которые в свою очередь зависят, например, от температуры. При этом погрешность, связанная с задержкой времени нарастания фронта входного импульса, существенно уменьшается.
Существенным отличием заявляемого технического решения является отсчет времени задержки распространения акустического сигнала по двум приемникам с использованием магнитострикционного звукопровода.
Изобретение относится к измерительной технике и может быть использовано для измерения и контроля перемещения и скорости. Техническим результатом изобретения является повышение точности измерения линейных перемещений. Предложены способ и устройство для его реализации. Устройство содержит программируемый цифровой блок 1 управления, генератор импульсных сигналов 2, первый усилитель 3, неподвижный электроакустический преобразователь 4, магнитострикционный звукопровод 5, неподвижный электроакустический приемник 6, подвижный электроакустический приемник 7, первый акустический демпфер 8 и второй акустический демпфер 9, первый усилитель-формирователь 10, управляемый источник порогового напряжения 11, второй усилитель-формирователь 12, второй усилитель 13, выпрямитель 14, АЦП 15, измеритель интервалов времени 16. 2 н.п. ф-лы, 1 ил.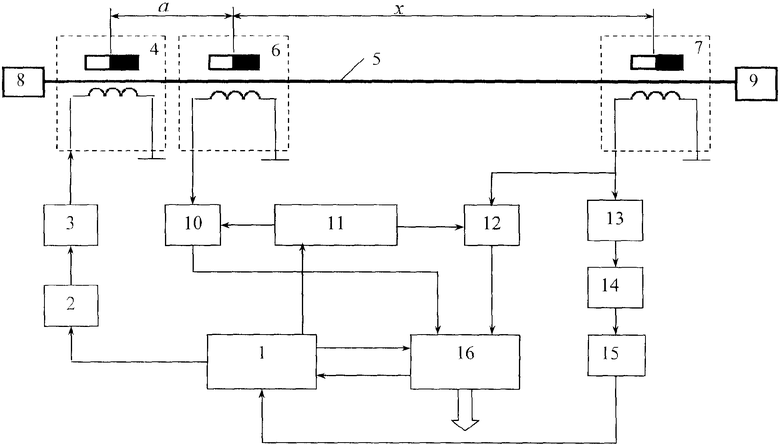
1. Способ измерения линейных перемещений, заключающийся в том, что перед каждым циклом измерения в приемной части устанавливают пороговое напряжение больше уровня шума и измеряют время распространения ультразвуковой волны по магнитострикционному звукопроводу до подвижного электроакустического приемника, соединенного с контролируемым объектом, и по значению этого времени судят о величине линейного перемещения, отличающийся тем, что устанавливают подвижный электроакустический приемник на максимально удаленное расстояние от электроакустического преобразователя и подвижным электроакустическим приемником, измеряют величину уровня шума Uш в магнитострикционном звукопроводе при отсутствии полезного сигнала, устанавливают величину порогового напряжения Uпорог больше величины уровня шума:
Uпорог>Uш,
измеряют время распространения ультразвуковой волны по магнитострикционному звукопроводу от момента срабатывания первого усилителя-формирователя до момента срабатывания второго усилителя-формирователя и по значению этого времени судят о величине линейного перемещения объекта.
2. Устройство измерения линейных перемещений, включающее магнитострикционный звукопровод, неподвижный электроакустический преобразователь, подвижный электроакустический приемник, жестко связанный с контролируемым объектом, акустические демпферы, первый усилитель, программируемый цифровой блок управления, измеритель интервалов времени, отличающееся тем, что в него введены генератор импульсных сигналов, неподвижный электроакустический приемник, установленный на звукопроводе на расстоянии а от электроакустического преобразователя, управляемый источник порогового напряжения, первый усилитель-формирователь, второй усилитель-формирователь, второй усилитель, выпрямитель, аналого-цифровой преобразователь, при этом первый выход программируемого цифрового блока управления соединен с генератором импульсных сигналов, выход которого соединен с первым усилителем, выход первого усилителя соединен со входом электроакустического преобразователя, второй выход программируемого цифрового блока управления соединен с управляемым источником порогового напряжения, выход неподвижного электроакустического приемника соединен с вторым входом первого усилителя-формирователя, первый вход которого соединен с первым выходом управляемого источника порогового напряжения, выход подвижного электроакустического приемника соединен с вторым входом второго усилителя-формирователя и с входом второго усилителя, выход которого соединен с входом выпрямителя, выход которого соединен с входом аналого-цифрового преобразователя, выход аналого-цифрового преобразователя соединен с входным каналом А программируемого цифрового блока управления, первый вход второго усилителя-формирователя соединен с вторым выходом управляемого источника порогового напряжения, выход первого усилителя-формирователя соединен с первым входом измерителя интервалов времени, второй вход которого соединен с выходом второго усилителя-формирователя, второй выход измерителя интервалов времени соединен с первым входом программируемого цифрового блока управления, третий выход программируемого цифрового блока управления соединен с третьим входом измерителя интервалов времени.
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2125235C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2117914C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2093789C1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1679187A1 |
| JP 5034133 A, 09.02.1993. | |||

