Изобретение относится к области автоматизированного управления оборудованием различного типа и назначения, в том числе установленного на транспортном средстве (ТС), с обеспечением эксплуатации отдельных агрегатов и управляемого объекта в целом в соответствии с предъявляемыми требованиями.
Известны технические решения по автоматизированному воздействию на объекты, предусматривающие использование электронной вычислительной машины (ЭВМ), работающей по определенной программе. В одних случаях программа составляется целиком для каждого конкретного объекта, в других случаях - в уже готовую программу записывается вид объекта, причем частично программы могут сопровождаться директивами по выполнению составных операций (авт. св. СССР N 1531082, кл. G 06 F 3/00, 1989; N 1698882, кл. G 06 F 3/00, 1991).
Недостатки известных решений связаны со сложностью создания (представления) алгоритмов многофакторных процессов контроля и управления в виде классических блок-схем и дальнейшего написания по ним программ на машинных языках и языках высокого уровня, доступных лишь для специально подготовленных программистов.
Наиболее близким к предложенному является способ контроля и управления для оборудования, согласно которому с помощью ЭВМ по предварительно введенной программе опрашивают датчики параметров и задатчики команд, обрабатывают полученную информацию, формируют сигналы для соответствующих измерительных и исполнительных органов и проверяют реализацию заключительных воздействий (патент США N 3731279, кл. G 06 F 3/00, 1973).
Недостаток указанного способа также определяется классическим (традиционным) методом создания алгоритмов и программ, что существенно ограничивает область его практического применения.
Задача изобретения - упрощение и повышение эффективности контроля и управления оборудованием путем компактных и легко трансформируемых отображений алгоритмов и записи программ, обеспечивающих возможность работы пользователю, не обладающему навыками программирования.
Поставленная задача решается тем, что в способе контроля и управления для оборудования, установленного преимущественно на ТС, согласно которому с помощью ЭВМ, например бортового микропроцессора, по определенному алгоритму и соответствующей ему предварительно введенной программе осуществляют следующую совокупность операций: опрашивают связанные с агрегатами и органами управления соответственно датчики параметров и задатчики команд, обрабатывают полученную информацию, формируют сигналы для соответствующих измерительных и исполнительных органов согласно техническим и эксплуатационным условиям и проверяют реализацию заключительных воздействий, - алгоритм представляют в виде формализованной, технологически и функционально завершенной алгоритмической таблицы (АТ), а соответствующую ему программу - в виде последовательности шестнадцатеричных и десятичных чисел, а также названий переменных, параметров, задатчиков команд и исполнительных механизмов, при этом АТ содержит разделы, соответствующие конкретным операциям, расположенные в порядке, определенном логикой выполнения процесса, а также строки, соответствующие описанию отдельной совокупности операций, каждая из которых включает последовательность выше перечисленных действий, причем в разделе "Номер совокупности операций" для каждой совокупности операций указывается ее порядковый номер, в разделе "Управление" для каждого из датчиков параметров, задатчиков команд, измерительных и исполнительных органов указывают операции, входящие в данную совокупность, в разделе "Ограничения" - максимальное время, выделенное на реализацию данной совокупности операций, в случае его регламентации номера последующей совокупности операций, к которой надо перейти по истечении установленного времени, в разделе "Безусловное выполнение" - однократные типовые и вспомогательные операции, с которых начинаются опрос датчиков и задатчиков и обработка полученной информации, необходимых для проверки совокупности условий осуществления операций, в разделе "Проверка условий и состояний" - совокупность граничных значений сигналов и состояний датчиков параметров при проведении опроса и проверки реализации заключительных воздействий, в разделе "Выполнение по условиям" - типовые и вспомогательные операции, необходимые для осуществления и/или завершения проверки и реализации заключительных воздействий, которые выполняются при совпадении заданной в разделе "Проверка условий и состояний" совокупности граничных значений сигналов и состояний с их текущей совокупностью, в разделе "Переход" - номер совокупности операций, обеспечивающий дальнейшее выполнение процесса.
Решению поставленной задачи способствует также ряд частных существенных признаков предложения.
В разделе "Управление" АТ указывают необходимые операции: выдача двухуровневых сигналов, например да/нет, включить/выключить, 1/0, в явном виде для каждой совокупности операций и всех имеющихся в таблице датчиков параметров задатчиков команд, измерительных и исполнительных органов вне зависимости от изменения или сохранения воздействия для обеспечения осуществления совокупности операций.
В разделах "Безусловное выполнение" и "Выполнение по условиям" АТ указывают типовые и вспомогательные операции, например вывод указанного кадра информации на экране дисплея, задержка выполнения программы на указанную величину, счета времени, запоминание величин и вычисленных значений, вывод результата вычисления либо обращения к процедуре или функции, изменение на 1 указанного значения переменной, сообщение конкретного значения, имени другой переменной, выражения или процедуры для вычисления значения.
В разделе "Проверка условий и состояний" АТ указывают операции проверки значений сигналов датчиков параметров, задатчиков команд, измерительных и исполнительных органов, значений переменных, исправность органов управления, а в строках, соответствующих совокупности операций, задаются граничные значения параметров сигналов и состояний, образующие совокупность условий для перехода на другие совокупности операций.
Числа, используемые при составлении программы управления и контроля и вводе ее в компьютер, приводятся в соответствие конкретным разделам, командам и операциям, используемым в АТ.
Для каждого числа, соответствующего какой-либо операции или команде в АТ, записывают программу на любом выбранном программном языке.
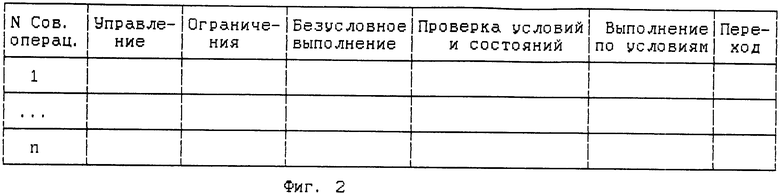
На фиг. 1 в качестве примера представлена функциональная схема устройства, реализующего предложенный способ в части управления оборудованием ТС; на фиг. 2 - структура АТ; на фиг. 3 - фрагмент одного из подразделов АТ.
Устройство включает в себя датчики частоты вращения 1 (коленчатого вала-КВД и выходного вала трансмиссии), датчики давления 2 жидкостей (смазки на входе и выходе двигателя, трансмиссии), воздуха (в пневмосистеме и в системе воздухоочистки на входе в двигатель), датчики температуры 3 (ОЖ, масла двигателя и трансмиссии, окружающей среды, выхлопных газов и ОЖ на выходе предпускового подогревателя двигателя, датчики уровней жидкости 4 (топлива, ОЖ и смазки двигателя и трансмиссии), первый блок преобразования 5 с преобразователем время-число импульсов (двумя хронометрами) 6, аналого-цифровыми преобразователями (АЦП) 7, 8, 9 и дешифратором адреса 10, датчики порогового значения электрического напряжения 11 (на концевых выключателях положения тормозов, жалюзи над радиаторами систем охлаждения, передач трансмиссии), датчики напряжения 12 в контрольных точках электроцепей ТС, второй блок преобразования 13 с дешифратором адреса 14 и АЦП 15, 16, блок принятия решений 17, выполненный в виде кнопочных переключателей 18, 19, третий блок преобразования 20 с дешифратором адреса 21 и формирователями импульсов 22, 23, блок управления - процессорный модуль (ПМ) 24, блок ввода программы (например, клавиатура) 25, дисплей 26, регистратор 27 с программатором 28 и постоянным запоминающим узлом (ПЗУ) 28, блок регистров 30, блок усилителей 31, исполнительные механизмы 32. Выходы датчиков частоты вращения 1 подключены к сигнальным входам преобразователя время - число импульсов 6, выходы датчиков давления 2, датчиков температуры 3 и датчиков уровней жидкости 4 - к сигнальным входам соответственно АЦП 7, 8 и 9 блока преобразования 5. Выходы датчиков порогового значения электрического напряжения 11 и датчиков напряжения в контрольных точках электроцепей 12 соединены с сигнальными входами соответственно АЦП 15 и 16 блока преобразования 13. Выходы блока принятия решений 17 подключены к сигнальным входам формирователей импульсов 22, 23 блока преобразования 20. Адресные входы преобразователей 6 - 9 соединены с выходами дешифратора адреса 10, адресные входы преобразователей 15, 16 - с выходами дешифратора адреса 14, а адресные входы формирователей импульсов 22, 23 - с выходами дешифратора адреса 21. Управляющие входы преобразователей 6 - 9, 15, 16 подключены к первому выходу ПМ 24, второй вход которого соединен с адресными входами дешифраторов адреса 10, 14 и 21 соответственно блоков преобразования 5, 13 и 20. Выходы преобразователей 6 - 9, 15, 16 и формирователей импульсов 22, 23 подключены к сигнальному входу ПМ 24 и одним из входов программатора 28, дисплея 26 и блока регистров 30, остальные входы которых соединены с обоими выходами ПМ 24. Программный вход ПМ 24 подключен к выходу блока ввода программы 25. Выходы блока регистров 30 через блок усилителей 31 соединены с исполнительными механизмами 32.
Перед включением устройства в работу оператором (пользователем) с помощью блока 25 и АТ вводится в ПМ 24 необходимая программа.
АТ предназначена для описания алгоритмов управления оборудованием (исполнительными механизмами) на основании анализа сигналов, поступающих с датчиков, в соответствии с требованиями, изложенными в технической и/или эксплуатационной документации на соответствующее оборудование.
Форма и содержание АТ, а также используемая в ней система условных обозначений (соглашений), во-первых, обеспечивают полноту, компактность и наглядность реализованного алгоритма, во-вторых, максимально приближены к программной реализации, что, в свою очередь, облегчает написание программы и повышает ее "читаемость" и, в-третьих, практически не зависит от конкретного языка программирования, используемого в системе автоматического управления.
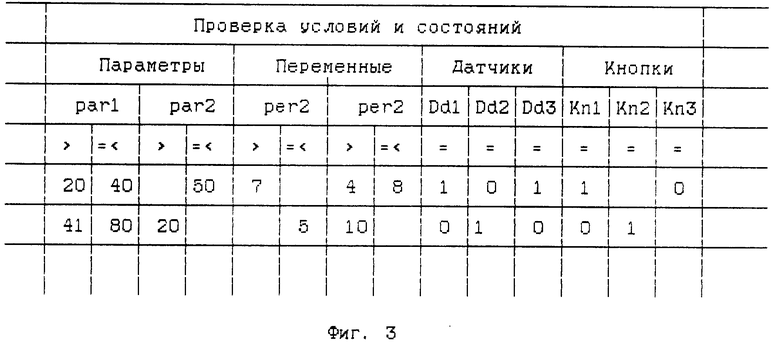
Общий вид АТ показан на фиг. 2, где выделены разделы "Номер совокупности операций", "Управление", "Ограничения", "Безусловное выполнение", "Проверка условий и состояний", "Выполнение по условиям" и "Переход". Каждый из разделов выполняет определенную функцию при описании алгоритма. Порядок расположения разделов в АТ определен из общей логики реализации алгоритма управления и контроля.
Каждая строка АТ соответствует описанию одной совокупности операций алгоритма управления. Она либо связана с изменением состояния исполнительных механизмов, находящихся в данный момент времени под управлением алгоритма, либо представляет собой законченную последовательность проверок и операций, обеспечивающих общую реализацию алгоритма (взаимодействие его составных частей).
В разделе "Управление" для каждого исполнительного механизма, находящегося под управлением описываемого алгоритма управления и контроля, задаются воздействия (управляющие сигналы), необходимые для обеспечения текущей стадии процесса. Для этого могут использоваться как двухуровневые сигналы (да/нет, вкл./выкл., 1/0), так и числовые значения, которые необходимо указать в явном виде для всех исполнительных механизмов, включенных в АТ.
В разделе "Ограничения" указываются максимальное время, выделенное на выполнение текущей совокупности операций, и номер другой совокупности операций, на которую надо перейти по истечении указанного времени. Если значение в АТ не указано - это означает, что время не регламентировано.
В разделе "Безусловное выполнение" описываются действия (операции), которые надо выполнить один раз до начала проверки условий и состояний. Этот раздел включает в себя два подраздела: "Команды" и "Переменные".
В подразделе "Команды" описаны обращения к стандартным (типовым) для описываемого алгоритма управления процедурам и функциям. Набор процедур и функций может меняться в зависимости от объекта и решаемых задач контроля и управления. В настоящее время определен следующий состав команд: Inform, Delay, Timer, Wait, Memory, Equal, Inc, Dec.
Inform - вывод указанного в ячейке таблицы кадра информации на экран дисплея.
Delay (переменная) [мин : сек] - задержка выполнения (пауза) программы на указанную в ячейке АТ величину.
Timer [мин : сек] - счетчик времени, требующий обязательного указания моментов его включения и выключения. Моменты включения и выключения определяются посредством указания в ячейке АТ имени переменной NameVar, которой присваивают значения счетчика с соответствующим указанием on или of. NameVar (on) - включение таймера. NameVar (of) - выключение таймера. Wait (NameVar) - ожидание выполнения условия, указанного в ячейке АТ в виде выражения, в течение указанного времени. По окончании (по условию или по времени) команды переменной NameVar присваивается последнее значение вычисленного выражения.
Veloc(ity) NameVar [p : m] - определение скорости процесса по изменению значения переменной за вычисленное или заданное время. В ячейке АТ указывается (параметр (приращивание), max время). Скорость процесса может быть определена по одному из двух выражений:
1) заданное приращение параметра/реальное время;
2. реальное приращение параметра/max время.
Вычисленное значение присваивается переменной(ым) NameVar с префиксами m (отрицательная производная) и/или p (положительная производная) согласно АТ.
Memory (NameVar) - запомнить указанную в ячейке АТ величину или вычисленное значение выражения под именем заданной переменной.
Equal - результат вычисления или обращения к процедуре или функции.
Inc - увеличить на 1 значение переменной, указанной в ячейке АТ.
Dec - уменьшить на 1 значение переменной, указанной в ячейке АТ.
В подразделе "Переменные" осуществляется изменение значений, используемых в алгоритме переменных, посредством указания в соответствующей ячейке АТ: конкретного значения, имени другой переменной, выражения или процедуры для вычисления значения. Указанная в подразделе переменная ни в каких других разделах (кроме раздела "Выполнение по условиям" и команд Inc и Dec) изменяться не должна. Основное требование к используемым в данном случае процедурам или функциям - время ее работы не должно превышать квант времени, отведенный на выполнение данной программы. В противном случае вычисление значения переменной должно осуществляться за несколько операций (шагов), указанных в АТ в явном виде.
Раздел "Проверка условий и состояний" предназначен для проверки выполнения совокупности условий с целью принятия решения о дальнейшем функционировании реализуемого алгоритма управления. На фиг. 3 приведен общий вид этого раздела. В состав раздела входят следующие подразделы:
Параметры - для проверки значений датчиков контролируемых параметров.
Переменные - для проверки значений переменных, используемых в алгоритме.
Датчики - для проверки значений датчиков, имеющих два состояния (контактных, предельных и т.п.).
Кнопки - для проверки кнопок (клавиш, тумблеров, переключателей и т.д.), доступных оператору (пользователю) в процессе работы с управляемым оборудованием.
В одном режиме возможна проверка нескольких совокупностей условий. Каждой совокупности условий соответствует свой набор операций в разделе "Выполнение по условиям" и номер следующей совокупности операций в разделе "Переход".
В разделе "Выполнение по условиям" описываются операции, выполнение которых требуется для одной из совокупности условий, проверяемой в предыдущем разделе. Структура раздела полностью совпадает со структурой раздела "Безусловное выполнение" и описана выше.
В разделе "Переход" указывается номер совокупности операций для дальнейшего функционирования алгоритма управления.
Устройство работает следующим образом.
При включении бортовой сети ПМ 24 путем посылки импульсов с интервалом в 0,1 сек опрашивает последовательно все датчики 1-4, 11, 12 рабочих параметров агрегатов ТС, связанные с первым блоком преобразования 5, а также опрашивает состояние кнопок 18, 19 в блоке принятия решений 17, запоминает полученную информацию в своем оперативном запоминающем узле, а часть информации, предназначенную для долговременного использования, записывает в дискретной форме в ПЗУ 28 регистратора 26.
На выводе информации устройство работает в двух режимах.
В основном, автоматическом, режиме процессорный модуль 24 отрабатывает одну или несколько запрограммированных функций, заданных водителем, и при этом есть необходимость вывода запросов, предупреждений или команд водителю. На экране дисплея 26 автоматически высвечивается соответствующая информация, содержащая, в частности необходимые для принятия решения текущие параметры технического состояния ТС. Перевод устройства в автоматический режим управления ТС по одной из нескольких запрограммированных функций осуществляется водителем после нажатия кнопки 19 в блоке принятия решений 17. При этом на экране дисплея 26 высвечивается "меню", содержащее одну или несколько доступных для ввода команд. Последовательно нажимая кнопку 18, водитель с помощью маркера на экране дисплея 26 выделяет нужную команду, которую вводит кнопкой 19.
Во вспомогательном, ручном, режиме, когда нет необходимости вывода запросов, предупреждений или команд водителю, первоначальный вызов и последующая смена на экране дисплея 26 текущей информации о техническом состоянии ТС, сгруппированной по кадрам (блокам), осуществляется после нажатия водителем кнопки 18. При этом предыдущая информация стирается с экрана дисплея 26 и высвечивается новая, следующая информация. Такой опрос информации имеет для водителя чисто справочное назначение и может производиться как на этапе предварительной оценки технического состояния ТС, т.е. в момент ожидания команд водителя на запуск одного из запрограммированных автоматических режимов, так и в рабочем режиме, при котором различные узлы, блоки и агрегаты ТС работают либо автономно под контролем блока управления, либо под его автоматическим управлением (каждый в своем режиме) и испытывают различные нагрузки и напряжения.
Вся информация с датчиков в аналоговой форме преобразуется посредством АЦП 7 - 9, 15, 16 в дискретную форму, за исключением информации о частоте вращения КВД и выходного вала трансмиссии, которая снимается с хронометров 6 и уже представлена в дискретной форме. Дешифраторы адреса 10, 14, 21 в блоках преобразования 5, 13, 20 по команде с ПМ 24 вырабатывают адресные сигналы в каждый момент времени для опроса и считывания информации с определенного датчика. Этим обеспечивается четкое и последовательное считывание информации с каждого АЦП и хронометра.
Итак, информация в двоичных кодах с хронометров 6 есть информация о частоте вращения КВД и выходного вала трансмиссии; с АЦП 7 выдаются значения давлений смазки двигателя (на входе и выходе), смазки трансмиссии, воздуха в пневмосистеме и разрежения в системе воздухоочистки на входе в двигатель; с АЦП 8 - значения температур ОЖ и масла двигателя, трансмиссии, окружающей среды, выхлопных газов и ОЖ на выходе предпускового подогревателя двигателя; с АЦП 9 - значения уровней масла двигателя, трансмиссии, уровней ОЖ и топлива; с АЦП 15 - информация о положении концевых выключателей тормозов, жалюзи над радиаторами системы охлаждения, передач трансмиссии; с АЦП 16 - значения напряжений в контрольных точках электроцепей ТС. Вся полученная информация запоминается во внутренней оперативной памяти ПМ 24. В ПЗУ 29 регистратора 27 производится запись информации по определенным адресам. Программатор 28 предназначен для формирования всех необходимых сигналов и импульсов при программировании ПЗУ 29 в режиме записи и считывания уже записанной информации в ПМ 24.
На начальном этапе работы ТС полученная информация путем сравнения текущих значений параметров работы ТС с его оптимальными значениями анализируется по алгоритму, заданному в цифровом виде в соответствии с АТ с целью определения исправности узлов, блоков, агрегатов, электроцепей ТС и готовности ТС к началу эксплуатации. При положительном результате на экран дисплея 26 выводится надпись "К работе готов", а в противном случае указывается вышедший из строя узел, блок, агрегат, вид неисправности и порядок ее устранения.
В процессе работы ТС устройство осуществляет информационную, контрольную, защитную и дефектологическую функции, введенные в табличном виде в память.
При информационной функции устройства вывод текущей оперативной информации о работе узлов, блоков и агрегатов ТС осуществляется путем последовательного нажатия кнопки 18 в блоке принятия решения 17 с формированием импульсов в формирователе 22 для инициирования запуска ПМ 24 на вывод информации, полученной в результате опроса всех датчиков, расположенных в контролируемых узлах, блоках и агрегатах ТС. Например, кадр 1 - высвечиваются все параметры работы двигателя, кадр 2 - высвечиваются параметры работы трансмиссии и т.д. Это осуществляется посылкой импульса опроса с ПМ 24 на все дешифраторы адреса 10, 14, 21, открывающие преобразованную в АЦП и хронометрах информацию, относящуюся к контролируемому блоку. Так, например, при контроле работы двигателя выводится информация с датчиков о давлении смазки на выходе и входе двигателя, степени разряжения в системе воздухоочистки на входе в двигатель, температуре ОЖ и масла в двигателе, ОЖ в предпусковом подогревателе двигателя.
Следующее очередное нажатие кнопки 18 в блоке принятия решений 17 вызывает стирание текущих значений параметров работы двигателя на экране дисплея 26 и появление параметров кадра 2 и т.д. Поочередно последовательно водителю - оператору демонстрируется вся информация о работе узлов, блоков и агрегатов ТС.
При контрольной функции устройства производится наблюдение за измеряемыми параметрами работы агрегатов ТС по отношению к заданным пороговым значениям. Например, известны: пороговое значение уровня топлива Qтоп1 (предполагаемое количество топлива, необходимое для преодоления расстояния до пункта заправки); пороговое значение уровня масла двигателя Qмас1 (количество масла, ниже которого работа двигателя не рекомендуется). Температура ОЖ имеет несколько пороговых значений, связанных с режимами работы ТС: Tож(п)1 - температура, ниже которой запуск двигателя без предварительного подогрева запрещен; Tож(п)2 - температура, ниже которой работа двигателя под нагрузкой не рекомендуется; Tож(п)3 - температура, ниже которой не рекомендуется движение на высших передачах; Tож(п)4 - температура, выше которой запрещена остановка двигателя; Tож(п)5 - температура, выше которой запрещена эксплуатация двигателя. Достижение параметром своего порогового значения сопровождается выводом на экран дисплея 26 соответствующего предупредительного или аварийного сообщений и записью аварийной информации в ПЗУ 29 регистратора 27.
Эта операция осуществляется путем периодического опроса датчиков 1-4, 11, 12, сравнения полученных значений с заданными в ПМ 24 и в случае их превышения - формирования информационного сообщения о данном событии на экране дисплея 26 водителю-оператору.
При защитной функции устройства происходит определение предаварийной ситуации, по совокупности параметров и граничных значений, заданных в табличном виде в соответствии с алгоритмической таблицей, ее изменение и предотвращение аварии. Например, аварийная защита ТС от перегрева по температуре ОЖ двигателя Tож осуществляется следующим образом.
Априорно определяют минимально допустимое время tож мин. доп. достижения температурой ОЖ порогового значения Tож(п)5 = 115oC. Принимают, в частности tож мин. доп. = 2 мин. При этом tож м1 = 1 мин отводят для суммарного времени реакции водителя на полученные рекомендации по воздействию на исполнительные механизмы, tож м2 = 0,5 мин - для суммарного времени осуществления водителем рекомендуемых процедур воздействия, tож м3 = 0,3 мин - для реакции водителя на предупреждение о включении автоматической защиты агрегата, tож м4 = 0,05 мин - для реакции защитного механизма на команду включения, tож м5 = 0,15 с - для осуществления процедуры автоматической защиты.
Вычислением разностей между текущим значением температуры ОЖ двигателя Тож(0) и ее предшествующим значением Tож(-1) определяются значения изменения температуры ОЖ двигателя DTож. Если изменение Tож имеет тенденцию к увеличению, определяется расчетное время tож(0)p достижения температурой Tож своего порогового значения Tож(п)5.
Если tож(0)p опускается до tож(0)p=t(c)=tож мин. доп.=tож м1+tож м2+tож м3+tож м4+tож м5=2 мин, подается команда на исполнительные механизмы (в автоматическом режиме) или водителю по выводу ТС из предаварийной ситуации.
Когда не замкнут концевой выключатель "Жалюзи над радиаторами системы охлаждения открыты" подается сигнал на открытие жалюзи или, для водителя, команда "Открой жалюзи". Когда замкнут концевой выключатель одной из высших передач, осуществляется переход на пониженную передачу или водителю следует команда "Включи пониженную передачу". Когда замкнут концевой выключатель низшей передачи, производится остановка машины или для водителя формируется команда "Останови машину". Когда двигатель работает в режиме холостого хода, выполняется остановка двигателя или водителю передается команда "Глуши двигатель". Наконец, когда в момент аварийной остановки двигателя Tож > Tож(п)4= +85oC, водителю направляются команда "Включи вентпомпу" или сигнал "Включена вентпомпа", что сопровождается автоматической подачей управляющего сигнала ПМ 24 через блок регистров 30, блок усилителей 31 на исполнительный механизм включения помпы.
В трех последних случаях производится запоминание вычисленного DTож в оперативной памяти до окончания пробега ТС для последующего учета при диагностировании его технического состояния.
Если расчетное время tож(0)p, уменьшаясь, достигает значения tож(0)p= t(з)= tож м3+tож м4+tож м5=0,5 мин и далее снижается, то указанные выше команды на исполнительные механизмы или водителю сменяются аварийным предупреждением о последующем автоматическом включении соответствующего исполнительного механизма защиты, которое сопровождается выводом текущей величины расчетного времени.
В момент, когда tож(0)p=tож м4+tож м5=0,2 мин, либо выдается сигнал на включение автоматической защиты, если режим автоматической защиты водителем не отменен, либо, в случае отмены, происходит запоминание информации о перегреве (Tож) в ПЗУ 29 регистратора 27, а водителю выводится сообщение "Аварийный перегрев" с индикацией текущего значения Tож на экране дисплея 26.
Аналогичным образом осуществляется аварийная защита двигателя и трансмиссии по изменениям температуры масла DTмас.двиг. и DTмас. транс., подогревателя - по изменению температуры ОЖ на выходе подогревателя DTож под., турбины турбокомпрессора двигателя - по изменению температуры выхлопных газов в выпускном трубопроводе двигателя DTвг, системы наполнения двигателя - по изменению разрежения в системе воздухоочистки на выходе в двигатель DPв, пневмосистемы ТС - по изменению давления в пневмосистеме DPпн.
Функции аварийной защиты двигателя и трансмиссии по перечисленным выше информационным параметрам отличаются только величинами t(c) и t(з). Для давления масла двигателя и трансмиссии и их уровней, уровня ОЖ двигателя, а также частоты вращения КВД с учетом большой динамичности процессов t(c)=10 сек, t(з)=5 сек. Для уровня топлива в топливных баках ТС с учетом малой динамичности процессов t(c)=30 мин, t(з)=10 мин.
При дефектологической функции устройства происходит выявление неисправностей, причин их появления и сообщение водителю приемов (действий) по их устранению.
Каждый раз после снятия нагрузки двигателя (остановке ТС после окончания пробега, аварийной остановке и т.п.) определяются изменения температуры ОЖ двигателя DTождвиг, масла двигателя DTмас. двиг и масла трансмиссии DTмас. транс, а также расчетное время снижения каждой из температур на 5oC.
Если расчетное время остывания ОЖ tож(0)p больше чем 30 с, то подается сигнал на жалюзи или выводится одно из диагностических сообщений водителю.
Когда не замкнут концевой выключатель "Жалюзи над радиаторами системы охлаждения открыты", водителю подается команда "Открой жалюзи". Когда расчетное время t(0) мас также оказывается больше 30 с, вырабатывается команда "Очистить фронт радиаторов". Когда двигатель работает на низких оборотах холостого хода, формируется сигнал на увеличение оборотов двигателя или сообщается водителю "Установи повышенные обороты". Когда Tож в режиме холостого хода двигателя не понижается или продолжает повышаться, фиксируется "Отказ системы прокачки ОЖ двигателя", что сопровождается автоматическим включением вентпомпы.
Аналогичным образом происходит выявление неисправностей и причин их появления в системах смазки двигателя по изменению Tмас.двиг и трансмиссии по изменению Tмас.транс.
Таким образом, настоящее изобретение обеспечивает эффективный автоматический контроль за режимами и техническим состоянием всех его ответственных узлов, блоков и агрегатов, оптимизацию режимов, автоматическое выявление неисправностей и причин их появления, а также способствует предотвращению возникновения аварийных ситуаций и выхода из строя ТС. При этом ввод программы в ПМ по рассмотренной выше АТ позволяет получить указанный эффект в каждом конкретном случае без привлечения программиста.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТАМИ ТРАНСПОРТНОГО СРЕДСТВА В ДИНАМИЧЕСКОМ РЕЖИМЕ | 1997 |
|
RU2102258C1 |
| СПОСОБ КОМПЛЕКСИРОВАННОГО ПРЕДСТАВЛЕНИЯ ВИЗУАЛЬНОЙ ИНФОРМАЦИИ ДЛЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2138409C1 |
| БОРТОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА (БИУС) АВТОМОБИЛЯ | 2002 |
|
RU2203814C1 |
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТАМИ ТРАНСПОРТНОГО СРЕДСТВА В ДИНАМИЧЕСКОМ РЕЖИМЕ | 2007 |
|
RU2338654C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ОЧИСТКИ И ОМЫВАНИЯ ВЕТРОВОГО СТЕКЛА АВТОМОБИЛЯ | 1999 |
|
RU2160677C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ПОЛЬЗОВАНИЯ АВТОМОБИЛЕМ | 1996 |
|
RU2100228C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ФУНКЦИОНАЛЬНЫМИ ПРОЦЕССАМИ В АВТОМОБИЛЕ И ЗАЩИТЫ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА | 1999 |
|
RU2160674C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ОБОРУДОВАНИЯ САМОДВИЖУЩЕГОСЯ НАЗЕМНОГО ОБЪЕКТА | 2003 |
|
RU2234430C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ДВУХДИАПАЗОННОЙ КОРОБКОЙ ПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2424927C1 |
| СПОСОБ КОНТРОЛЯ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2129711C1 |
Изобретение относится к автотракторной технике и может быть использовано в аппаратуре автоматического контроля и управления режимами работы и техническим состоянием агрегатов транспортного средства. Техническим результатом является упрощение контроля управления оборудованием. Сущность изобретения заключается в представлении алгоритма в виде формализованной, технологически и функционально завершенной алгоритмической таблицы, а соответствующей ему программы - в виде последовательности шестнадцатеричных и десятичных чисел, а также названий переменных, параметров, задатчиков команд и исполнительных механизмов. Алгоритмическая таблица содержит разделы, соответствующие конкретным функциям при описании процесса контроля и управления и расположенные в порядке, определенном логикой выполнения процесса, а также строки, соответствующие описанию отдельных режимов данного выполнения. 5 з. п. ф-лы, 3 ил.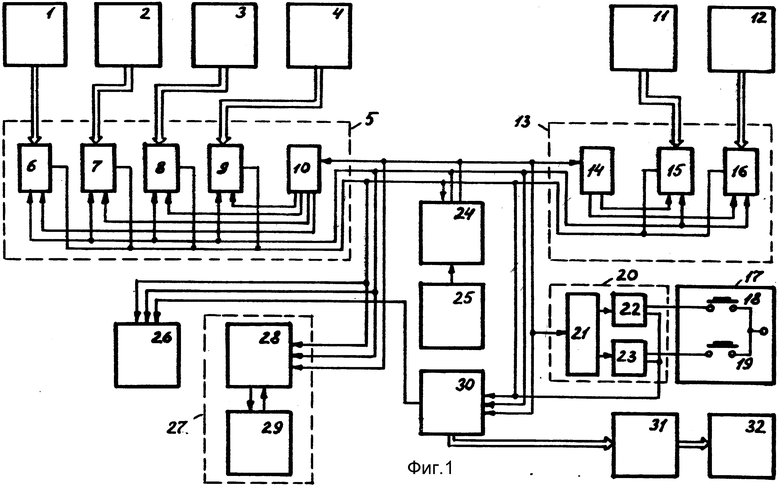
| US, 3731279 А, 01.05.73 | |||
| SU, 1531082 А1, 24.12.89 | |||
| SU, 1698882 А1, 15.12.91. |

